綠色環保節能型越障玻璃擦洗機器人
2020-11-09 07:26:03張明高興軍
價值工程 2020年30期
張明 高興軍

摘要:綠色環保節能型越障玻璃擦洗機器人是在現有的擦玻璃機器人上進行改造,集機械設計、智能控制以及節能環保技術于一體,解決節能和全自動擦拭玻璃的復雜問題。在節能方面,它的表面鋪設太陽能板,在白天工作的時候,通過機器人內部的能源裝換裝置,將吸收的光能轉化為機器人工作需要的電能,實現綠色環保。另外在保證機器人正常工作的時候將機器人的電機減少一半,達到節能的目的。在功能方面,它可以幫助人們實現玻璃窗、玻璃墻的智能越障和全自動擦洗工作,降低人們的勞動強度,減少危險性。綠色環保節能型越障玻璃擦洗機器人的技術關鍵在于能量轉換裝置和智能越障控制系統。能量轉換裝置的效率決定了該機器人在工作時利用少量能量高效完成玻璃的清潔。智能控制系統的效率決定了機器人對玻璃之間障礙的跨約能力,效率高的機器人能夠靈活在障礙之間進行跨約,減少人工的參與,高效完成擦玻璃這項工作。
Abstract: Green environmental protection and energy saving obstacle glass cleaning robot is based on the existing glass cleaning robot transformation, set mechanical design, intelligent control, as well as energy saving and environmental protection technology in one, to solve the complex problem of energy saving and automatic glass cleaning. In terms of energy saving, the surface of the robot is covered with solar panels. During the daytime, the energy installation inside the robot can be used to convert the light energy absorbed into the electric energy needed by the robot, so as to achieve environmental protection. In addition, the motor of the robot can be reduced by half to achieve the purpose of energy saving when the robot works normally. In terms of function, it can help people realize intelligent obstacle crossing and automatic scrubbing of glass windows and glass walls, reducing people's labor intensity and reducing danger. The key technology of green, environment-friendly and energy-saving glass surmounting robot lies in energy conversion device and intelligent control system of obstacle surmounting. The efficiency of the energy conversion device determines that the robot can use a small amount of energy to clean the glass efficiently. The efficiency of the intelligent control system determines the ability of the robot to cross the barriers between the glasses. The robot with high efficiency can flexibly cross the barriers between the glasses to reduce the participation of human beings and finish the work of glass cleaning efficiently.
關鍵詞:綠色環保;節能;智能越障;全自動;玻璃擦洗機器人
Key words: going green and environment protection;energy conservation;intelligent obstacle;full-automatic;glass cleaning robot
中圖分類號:TP242.6 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1006-4311(2020)30-0223-02
0 ?引言
國內外廣泛應用的玻璃擦洗機器人[1]存在三個技術瓶頸:不能完全實現自動化,遇到玻璃邊框等不能跨越,對人依賴大;清潔過程存在盲區;對能源利用率低且能耗大。為此本文擬設計一款綠色環保、節能、可實現自動越障功能的玻璃擦洗機器人,代替人工完成玻璃清潔工作,并且為綠色環保做一定的貢獻。
1 ?綠色環保節能型越障玻璃擦洗機器人的設計
1.1 玻璃擦洗機器人的靜力學分析
玻璃擦洗機器人設計工作時主要受自身重力、真空吸附力和摩擦力的作用,為保證機器人能夠穩定吸附在玻璃表面,需要保證機器人在x軸和y軸方向受力平衡。玻璃擦洗機器人能夠穩定吸附在玻璃表面工作,一方面可以增加玻璃表面對清潔布的摩擦系數;另一方面可以減小機器自身的總重量。
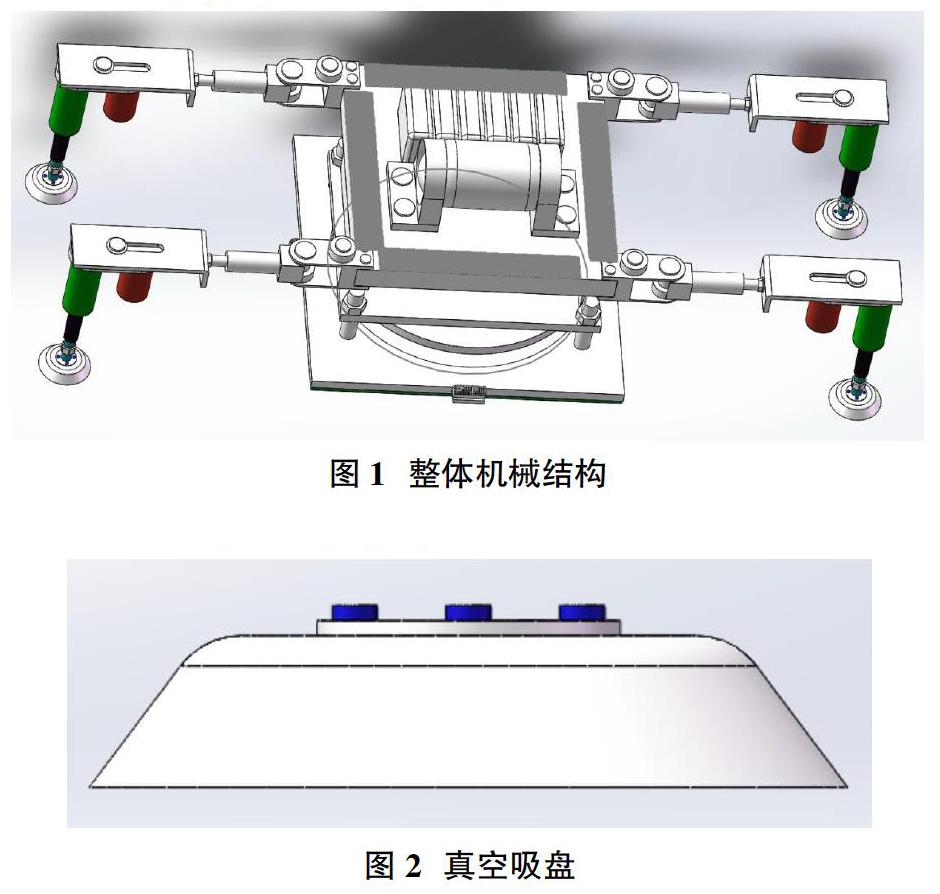
1.2 整體機械結構設計
整體機械結構三維圖如圖1所示。
真空吸盤如圖2所示。
玻璃擦洗機器人,包括:
機架如圖3所示。
機械腿如圖4所示。
玻璃清洗裝置如圖5所示。
還包括:
調節螺桿如圖6所示。
2 ? 綠色環保節能型越障玻璃擦洗機器人的系統設計[2]
2.1 玻璃擦洗機器人的控制系統方案分析
控制系統是玻璃擦洗機器人的核心,一個優越的控制系統可以給機器人提供高效清潔模式、多種路徑規劃模式、平穩的運動狀態。
為了保證擦玻璃機器人能夠安全高效的完成清潔工作,因此,至少具備以下基本功能:
①穩定的電機驅動系統,指能有效快速控制四個驅動電機正反轉,并通過PWM來對四個電機分別進行實時調速。
②傳感器信號的檢測和處理系統,主要包含微型開關傳感器(檢測機器人是否碰撞到邊框)和陀螺儀模塊傳感器(進而檢測和調整擦玻璃機器人的運動姿態,保證其能夠平穩工作)。
③安全有效電源管理系統,實時檢測電量,在低電量情況下進行報警。
④合理有效的路徑規劃系統,考慮到窗戶的邊框和拐角區域是玻璃擦洗機器人難以覆蓋的地方,故需要通過合理設計擦拭單元和有效的路徑規劃,來實現擦玻璃機器人最大化地擦拭整個窗戶表面。
⑤自動和遙控的控制系統,配備紅外模塊,使得機器人具有自動或遙控兩種工作模式。
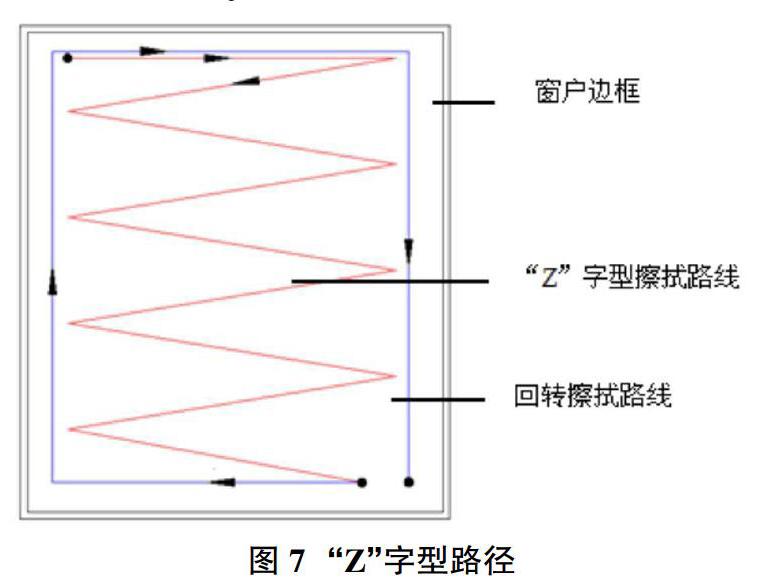
2.2 玻璃擦洗機器人的行走路徑規劃
玻璃擦洗機器人路徑規劃屬于簡單的離線路徑規劃。充分利用傳統人工擦玻璃的優勢擦拭效果顯著、擦拭路線簡單。人工擦拭窗戶的步驟為濕擦、刮拭、干擦三部分,擦拭路線為從窗戶上邊框自左向右“Z”字型方式如圖7所示。考慮到機器人對窗戶直角區域和邊控區域擦拭不夠徹底,設計機器人擦拭路徑為先“Z”字型行走,然后在繞窗邊回轉一圈擦拭方式。
本機器人有效的解放了勞動力;自動巡邊,水平方向自動運行,實現對玻璃的無死角,全覆蓋擦拭;單塊玻璃擦試完畢后自動進位到玻璃上方,實行智能跨越動作,擦拭另一塊玻璃。
3 ?結語
綠色環保節能型越障玻璃擦洗機器人是現在市場上玻璃擦洗機器人[3][4]的升級版,在能源利用、節能減排、智能越障、自動擦洗方面具有很強的代表性。在節能方面,它的表面鋪設太陽能板,在白天工作的時候,通過機器人內部的能源裝換裝置,將吸收的光能轉化為機器人工作需要的電能,實現綠色環保。另外在保證機器人正常工作的時候將機器人的電機減少一半,達到節能的目的。在功能方面,它可以幫助人們實現玻璃窗、玻璃墻的智能越障和全自動擦洗工作,降低人們的勞動強度,減少危險性。
參考文獻:
[1]李潔,遲明路,呂廣靜.一種高層建筑自動擦玻璃系統設計與研究[J].南方農機,2020,51(05):45-46.
[2]郭韶山,陳洋,張慎云,童瑞晗,溫博.自動擦窗機器人系統設計[J].南通職業大學學報,2019,33(01):69-75.
[3]劉晨,趙艷紅,張福來.一種攀壁式擦玻璃機器人的研究[J].南方農機,2019,50(02):169,198.
[4]王侃,何繼紅,周幫平.一種輪足組合式擦玻璃機器人機構設計研究[J].機械工程與自動化,2018(02):112-114.
課題項目:2020年遼寧省大學生創新創業項目,編號:2020101480011。
作者簡介:張明(1999-),男,河北張家口人,本科生,研究方向為機械設計制造及其自動化;高興軍(通訊作者)(1979-),男,江蘇泰興人,副教授,碩士,研究方向為機構創新設計。
猜你喜歡
青年時代(2016年31期)2017-01-20 02:18:51
建筑建材裝飾(2016年13期)2017-01-04 11:12:10
科學與財富(2016年18期)2016-12-22 18:02:22
科學與財富(2016年26期)2016-12-01 11:04:57
科技視界(2016年18期)2016-11-03 21:56:04
中國科技博覽(2016年19期)2016-10-19 13:10:22
中國科技博覽(2016年19期)2016-10-19 12:51:06
中國科技博覽(2016年18期)2016-10-19 11:23:00
中國科技博覽(2016年18期)2016-10-19 07:47:05
科學與財富(2016年28期)2016-10-14 20:02:56
