基于鰭形效應的一種自適應機械手爪設計
2020-11-10 01:56:28季宇辰王哲哲
江蘇科技信息 2020年26期
關鍵詞:設計
楊 濤,許 展,季宇辰,王哲哲
(1.南京航空航天大學航空學院,江蘇南京210016;2.南京航空航天大學機電學院,江蘇南京210016)
0 引言
我國作為農業大國,瓜果蔬菜以及禽蛋的產量在日漸提高,對于此類農副產品的采摘、挑選等工作采用手工操作已經完全不能滿足生產需求。不僅僅是針對農夫產品,在一些工廠或者食品加工廠,比如抓取衣物、皮包、零食等產品時,頻繁地采用人工勞動力不僅可能會污染產品,同時也會提高生產成本。因此,那些更加高效且不易損壞產品的柔性機械爪[1]的研究逐漸成為熱點。它們大多使用了變形特性優良的柔性材料或者多關節手指結構[2-3],采用氣動[4-5]或者繩驅動[6-8]的方式進行手指的柔性穩定控制,以達到減小應力保護抓取對象的目的。比較有名的有Robotiq公司的平夾自適應手[9],英國帝國理工大學Scott團隊研發的Omnigripper[10],江南大學張秋菊等提出一種柔性腕手[11]。但是,這些柔性手爪的抓取對象大多局限于形狀較為規則的物體,對于長徑比較大、表面斜度較大的物體,缺少合適的解決方案。
本文設計了一款新型柔性機械手爪,根據抓取對象的形狀尺寸,通過各種傳動模塊自動調節手指位置和間距、改變手指扭轉角度,使手指在合適的位置實現對象的抓取。同時,手指使用了柔性材料,通過仿生學的“鰭形效應”可以很好地貼合抓取對象表面,從而實現穩定安全地抓取對象。手爪外部的機械接口,能夠與多種機械臂適配連接,有廣泛的適用范圍。
1 功能設計
抓取對象:家庭常見果蔬,以及尺寸相近的家用物品,對于形狀尺寸變化大的物體具有很好的抓取效果,以抓取蘋果和茄子為例,如圖1所示。抓取范圍:尺寸為40~120 mm的物體,接觸點表面斜度相對手指小于40°。模塊化結構:獨立設計的機械手爪,可以適配不同規格的機械臂。
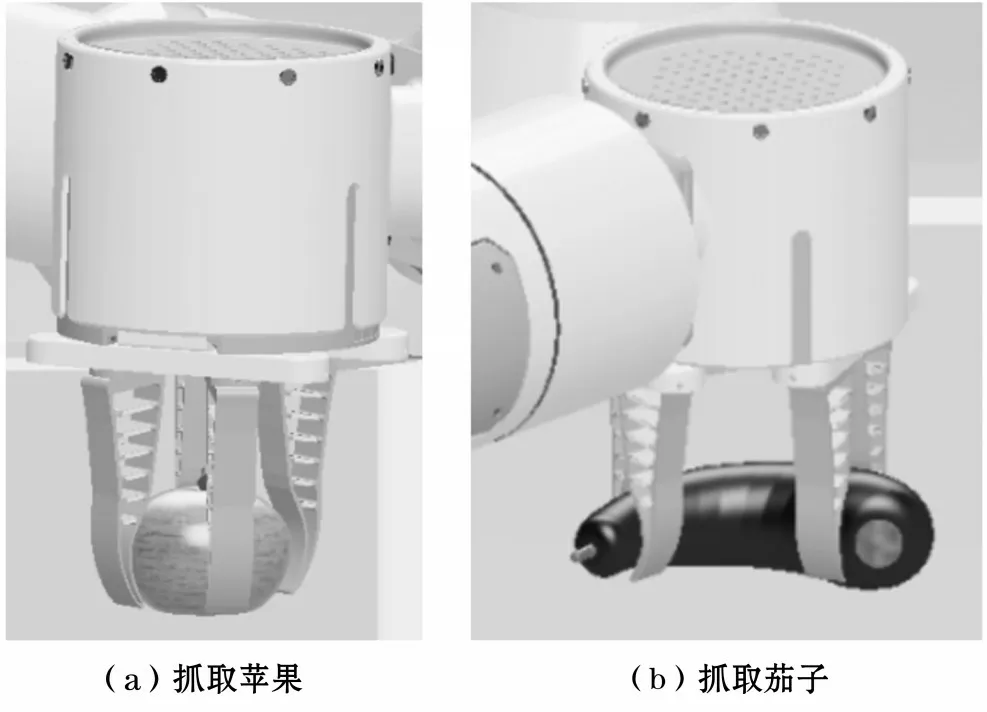
圖1 功能設計
2 基于鰭形效應的手指設計
2.1 鰭形效應
“鰭形效應”由生物學家Leif Kniese在捕魚時發現,魚鰭由兩個“V”形骨頭和其間的結締組織構成;如圖2所示,拉動“V”形骨頭的一側會導致魚鰭的變形,使根處和尖端朝施加的載荷方向發生彎曲。鰭形結構在貼近物體時會發生變形以適應物體的表面。
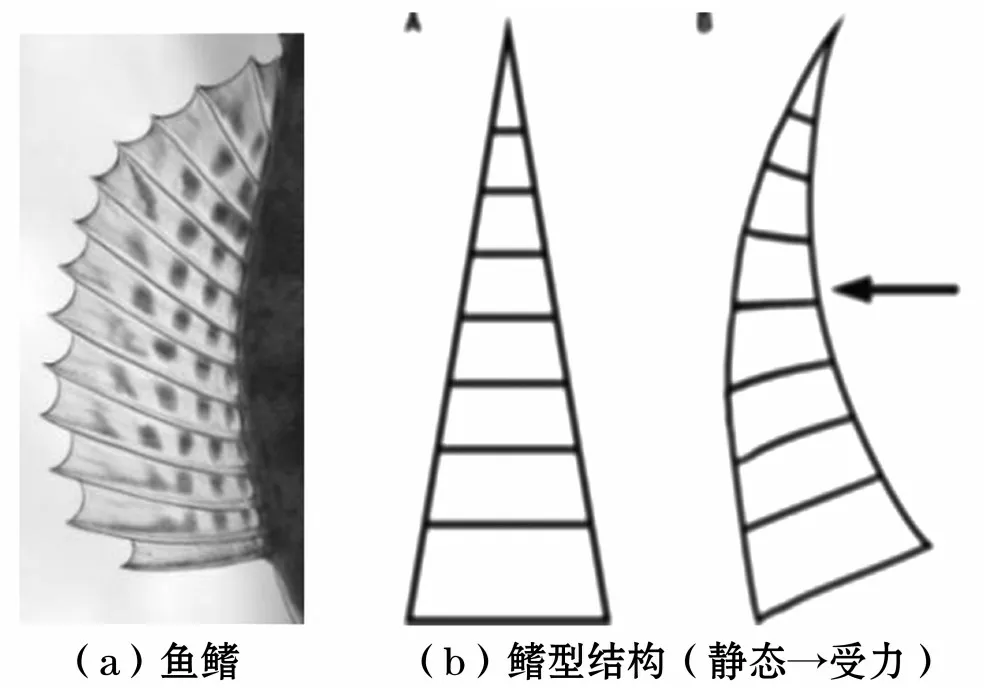
圖2 鰭形效應
2.2 手指設計
基于魚鰭的仿生學原理結合以有限元分析,設計出一款既能夠穩定抓取大物體又可以安全地抓取小物件的手指結構如圖3所示,并且在受載的情況下產生自適應變形,如圖4所示。

圖3 手指結構
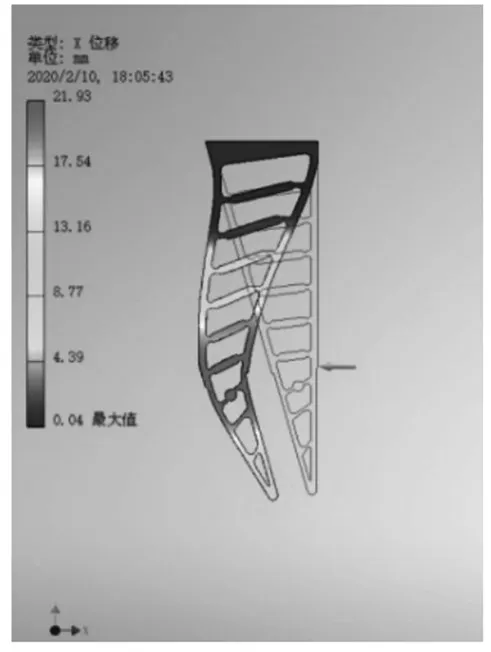
圖4 手指受力變形
3 機械系統設計
手爪的外形呈現圓柱狀,中空殼體內安裝有驅動系統以及大部分的傳動機構,手爪前側安裝有4個手指,以及供手爪移動的導軌。通過齒輪齒條、絲桿螺母、虎克鉸等多種運動機構,以及渦卷扭簧、套索等柔性結構的應用,實現了對尺寸形狀差異較大的物體的柔性抓取。手爪整體采用模塊化設計如圖5所示,本文著重于機械設計部分。機械手爪整體設計如圖6所示。
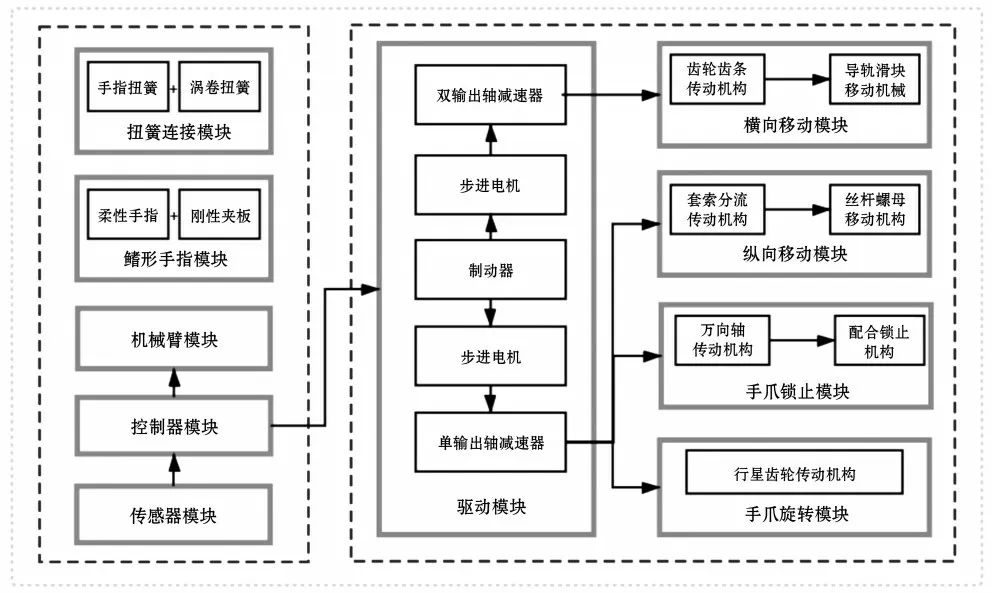
圖5 機械手爪系統結構組成
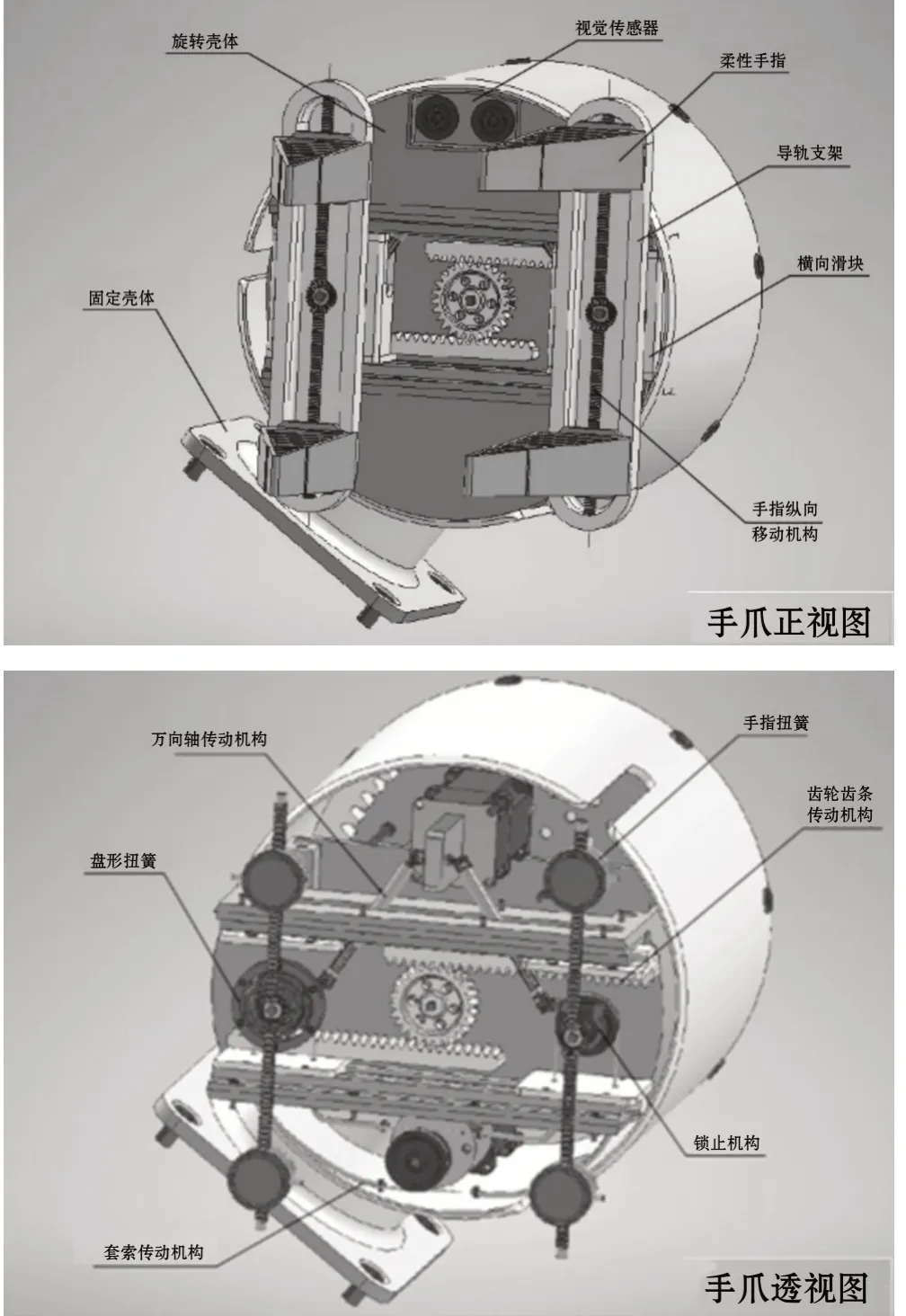
圖6 機械手爪結構
3.1 橫向移動模塊
該機構采用齒輪齒條控制手指的橫向移動(見表1),步進電機通過減速器控制齒輪旋轉,如圖7所示。由于齒條與滑塊固連,使得兩側滑塊沿著固連于殼體的導軌橫向移動,繼而帶動手指移動,如圖8所示。當手指運動到預定位置時,電機停止工作,制動器通電鎖緊傳動軸,齒輪齒條以及滑塊保持靜止,從而保證手爪能夠牢固地夾持物體。

表1 齒輪齒條副設計數據
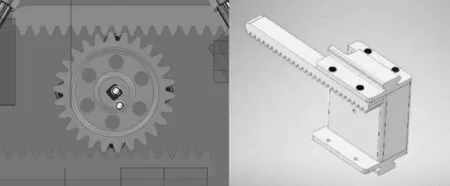
圖7 齒輪齒條結構與裝配關系
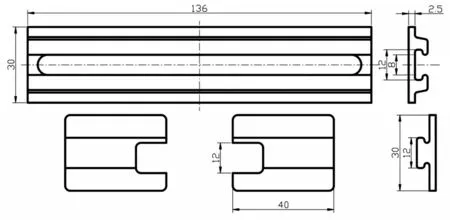
圖8 固定導軌與滑塊導軌的工程圖
沿著導軌做橫向移動的滑塊,具有不對稱的空心結構,腔體內安裝有渦卷扭簧(用于手指支架的隨型轉動)、配合軸套(鎖止模塊的執行機構)以及套索從動輪(縱移模塊的傳動機構),手指的導軌支架通過渦卷扭簧與滑塊相連。
3.2 縱向移動模塊
該機構控制手指的縱向移動,即控制同側手指的間距。由于安裝在滑塊上的手指支架之間的間距隨著滑塊而改變,且手指間距控制的精度要求并不高,因此該模塊的傳動機構使用了柔性套索。主動輪通過套索帶動兩側從動輪同步轉動,從動輪帶動同軸的錐齒輪轉動,位于手指導軌支架的錐齒輪則帶動絲桿轉動,從而使與手指相連接的螺母滑塊在絲桿上實現縱向移動。
3.2.1 套索分流傳動機構
鋼絲繩與外套管都為柔性材料,滑塊移動導致套索輪間距變化,套索傳動也能正常進行,如圖9所示。
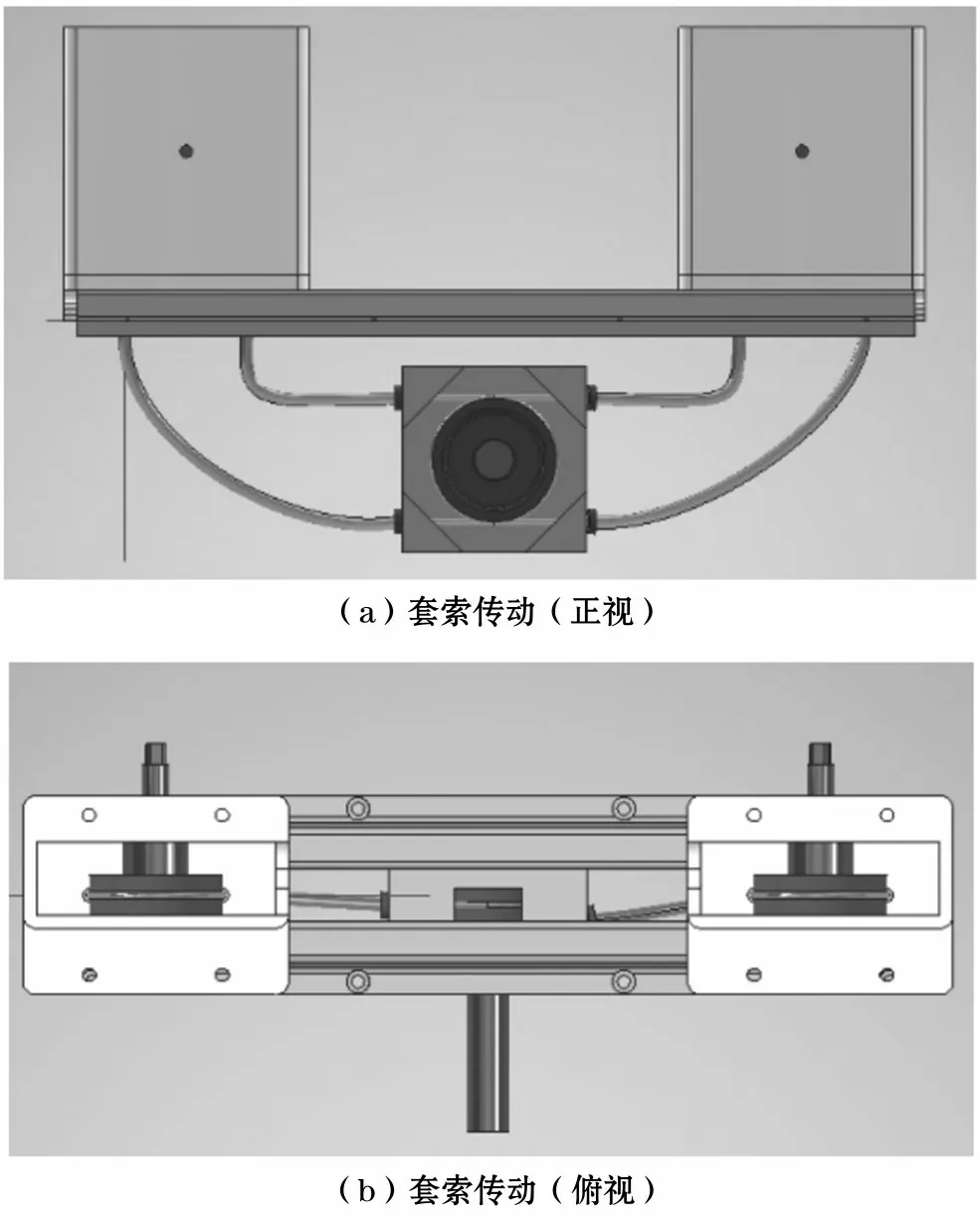
圖9 套索分流傳動機構
3.2.2 絲桿螺母移動機構
采用絲桿螺母機構來實現縱向移動,如圖10所示,各項數據如表2—3所示。
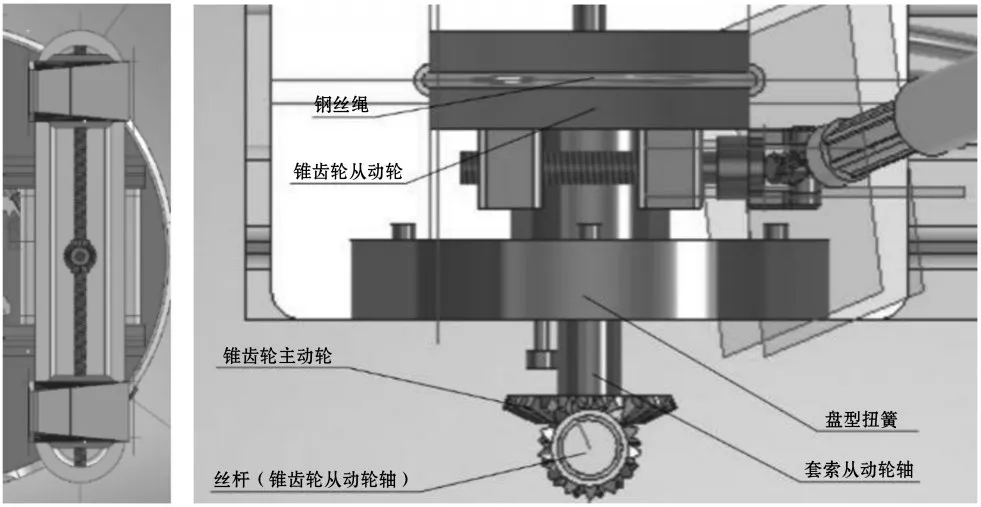
圖10 錐齒輪與套索從動輪的傳動關系
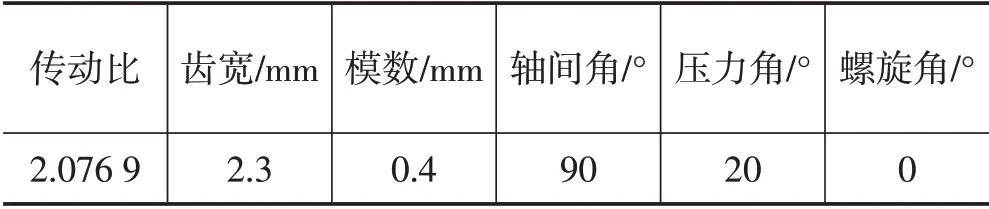
表2 齒輪通用參數
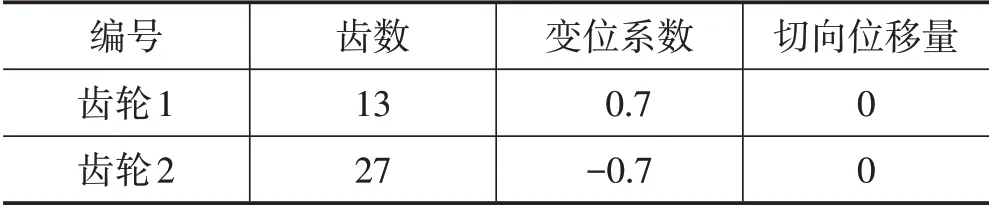
表3 齒輪各項參數
3.3 手爪鎖止模塊
設計該機構的目的是為了限制各個機構的運動和扭簧的轉動,使手指最終固定于一個貼合物體表面的位置。鎖止機構可以改變鎖止軸套半徑和固定渦卷扭簧內圈,從而固定與渦卷扭簧內圈相固連的手指導軌支架。為了節省空間,電機輸出軸和執行機構不同軸,且位于滑塊內的執行機構可隨著滑塊而移動,因此該模塊的傳動機構使用了虎克鉸以及長度可調的花鍵軸。電機的減速器設計成雙輸出軸形式,以保證兩側鎖止機構工作的同步性。
3.3.1 萬向軸傳動機構
通過萬向軸來實現鎖止力矩的傳遞,圖11顯藍部分采用的花鍵連接,花鍵各項參數如圖12所示。
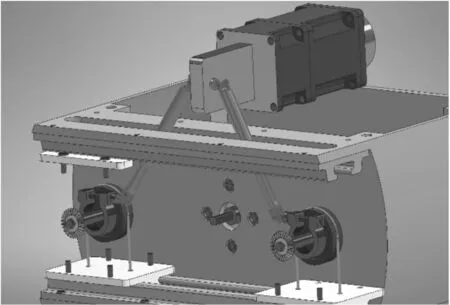
圖11 萬向軸傳動結構(亮顯部分)
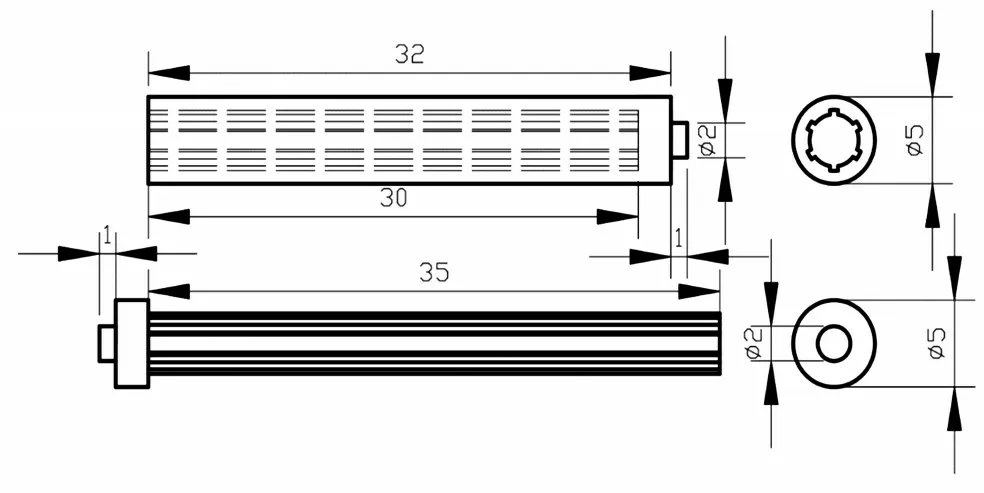
圖12 花鍵軸、花鍵軸套工程圖
3.3.2 配合鎖止機構
萬向軸帶動與鎖緊軸套相配合的螺釘旋轉,使鎖緊軸套受力變形產生小位移,軸套與扭簧內圈的配合性質轉為過盈配合,從而限制了扭簧運動,如圖13所示。為了使結構更加牢固,鎖緊軸套內圈進行了壓花工藝的處理,極大地增加了接觸時的摩擦力。
在對鎖緊軸套施加載荷110 mN·m為電機最大力矩。此時最大位移為0.133 9 mm,如圖14所示,軸套與扭簧內圈緊密配合,符合設計要求。
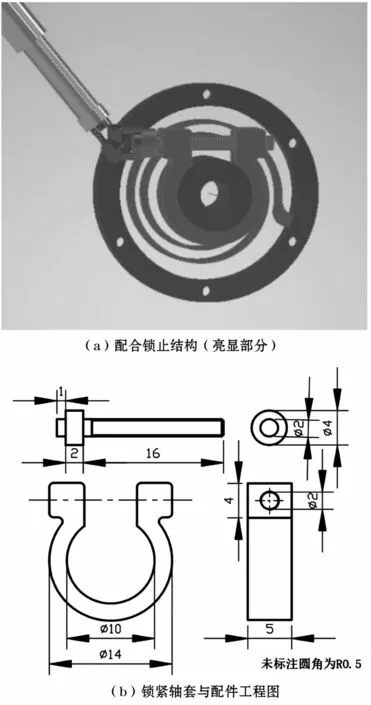
圖13 配合鎖止機構
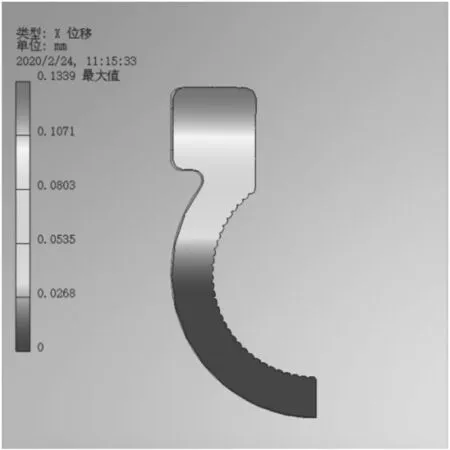
圖14 應力云圖(鎖緊軸套)
3.4 手爪旋轉模塊
該機構由內嚙合齒輪副組成,行星齒輪與旋轉殼體聯結(即手爪主體),定軸齒輪固聯于固定殼體(即與機械臂連接的部分)如圖15所示,各項數據如表4所示;抓取物體前,位于旋轉殼體內的步進電機帶動行星輪旋轉,齒輪嚙合,從而使旋轉殼體旋轉。當手指處于抓取物體的最佳位置時,電機停止工作,抱閘鎖死電機輸出軸,手爪保持該姿態抓取物體。
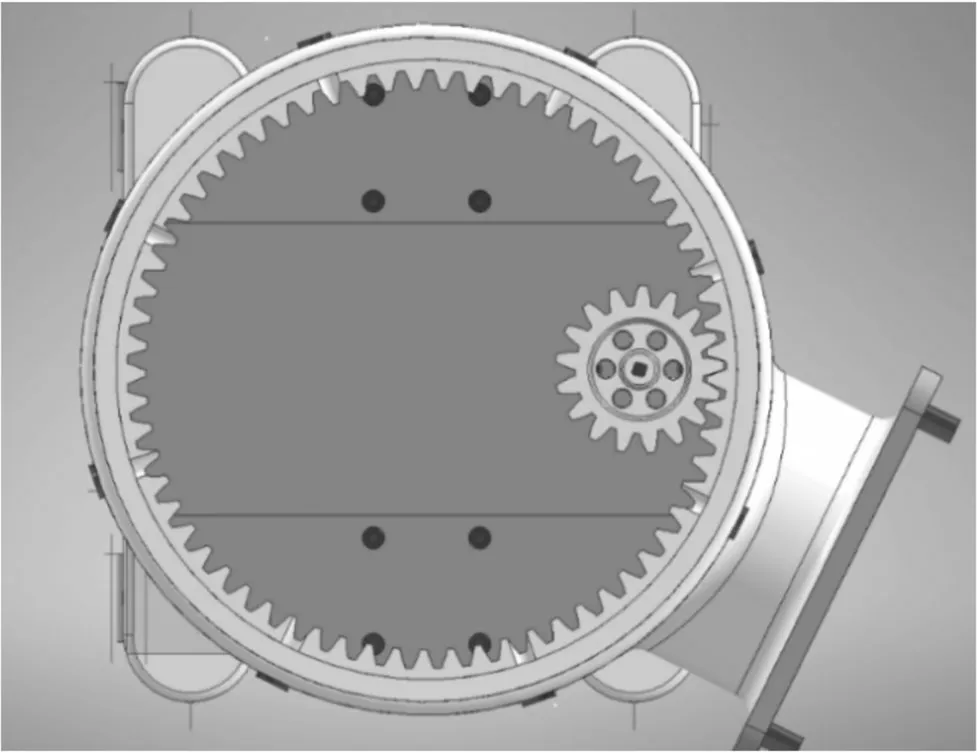
圖15 行星齒輪副

表4 行星齒輪副設計數據
3.5 扭簧連接模塊
手爪具有兩個扭簧,一是位于手指與螺母滑塊連接處的雙向扭簧,二是位于手指導軌支架與滑塊連接處的渦卷扭簧如圖16所示。當手指接觸物體表面時,扭簧受力發生轉動,帶動手指、導軌支架傾角變化,使得手指貼合不規則物體表面。
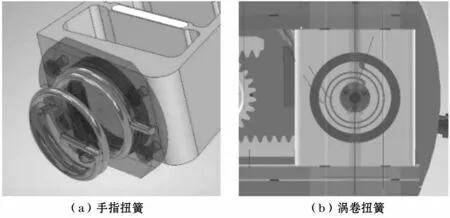
圖16 扭簧連接模塊
如圖17(a)扭轉彈簧時,手指最大轉角為60.82°>45°(設計最大轉角),符合要求。在與手指滑塊間留有0.5 mm余量的情況下,扭簧最大內徑為16.384 mm>16 mm(滑塊直徑),符合要求。
如圖17(b)對渦卷扭簧施加載荷(80 N·mm,面力矩)最大應力為440.2 MPa<861 MPa,安全系數為1.96,強度符合設計要求。最大轉角約為35°~40°。
4 動力部件與驅動系統
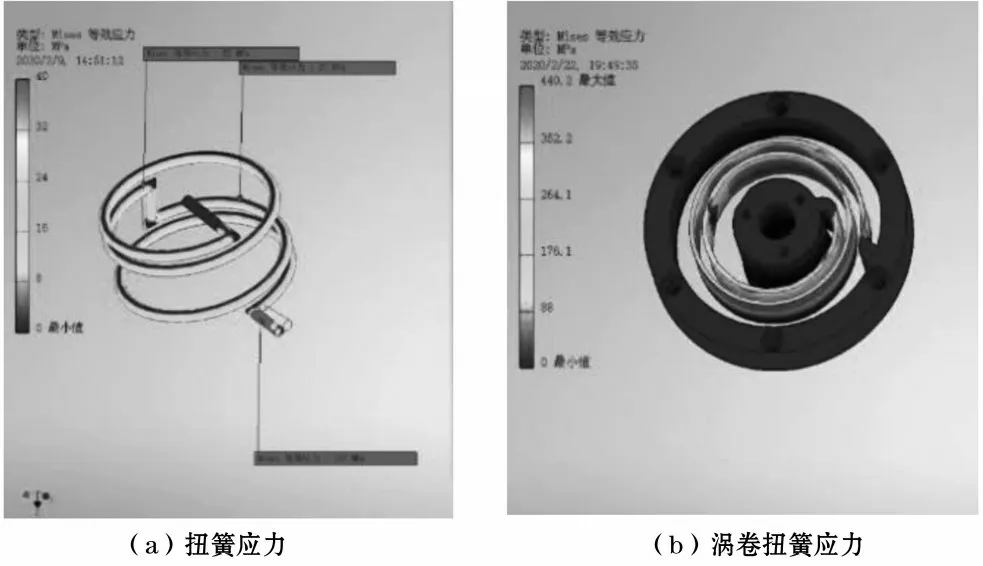
圖17 拉簧應力
根據手爪設計用途,需要電機具有良好的位置精度和反應速度,而對扭矩和轉速的要求較低,因此,選用的驅動電機多為步進電機,并根據需要搭配行星齒輪減速器,這種減速器結構簡單、體積較小,在保證精密傳動的前提下,能有效降低轉速增大扭矩和降低負載/電機的轉動慣量比。
根據設計目標,機械手爪具有4個驅動,分別控制手指的橫向、縱向移動以及殼體旋轉和手爪鎖止。下面對這4個部分的驅動情況進行粗略的設計計算,并根據計算結果選擇合適的電機和減速器。
4.1 橫向移動模塊
橫向移動模塊驅動載荷的計算主要考慮手爪的抓力,手爪抓取物體的最大直徑為,如圖18所示。當該物體為球體時體積最大,密度取1×103kg/m3(接近果蔬密度),則有物體體積與質量:
V=πR3=9.05(m3)
m=ρυ=9.05(kg)
4個手指所受摩擦力與手指壓力:
Ff=4μFN=mg
FN=mg/4μ;
齒輪齒條接觸面的正壓力F=2FNcosα,當α=0時,Fmax=2FN;
又F=,取μ=0.875得:
F=5.17(N)
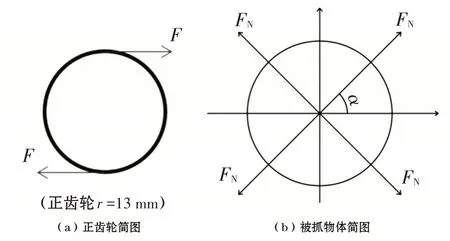
圖18 橫向移動模塊驅動載荷計算
Mmax=2F=134.42(N·mm)
綜合考慮負載扭矩需求和手爪的空間體積,選用型號為STP-43D1079的42步進電機,該電機的扭矩為257 mN·m,具體參數如表5所示。
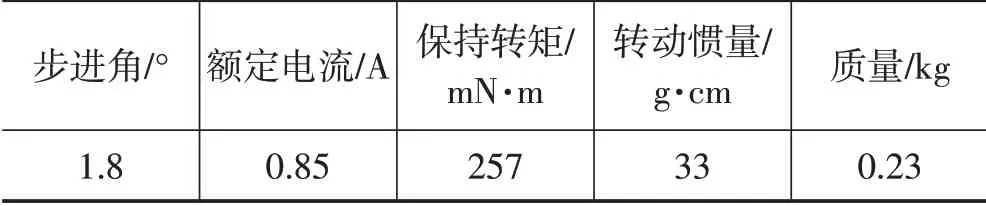
表5 STP-43D1079電機參數
4.2 縱向移動模塊
縱向移動模塊驅動載荷的設計計算,主要考慮絲桿螺母中螺旋副的摩擦。錐齒輪簡圖如圖19所示。
螺旋副扭矩的計算公式為T1=Fw·d/2·tan(Φ+λ),其中:
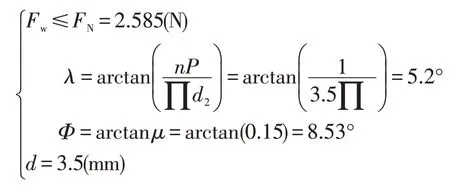
解得螺旋副中徑扭矩T1≤1.11(N·mm)。
Fw為螺旋副中軸向外力,λ為螺紋升角,Φ為摩擦角,d為螺紋中徑。
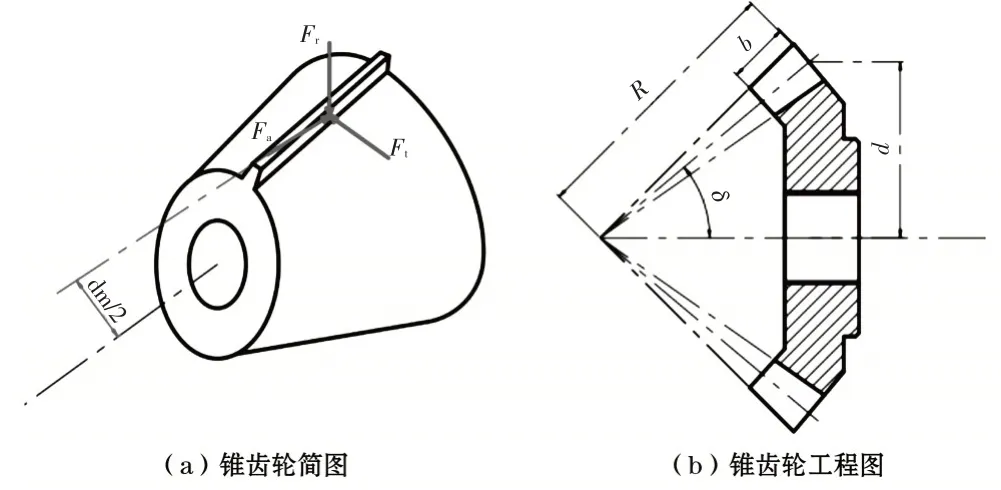
圖19 縱向移動模塊驅動載荷的設計計算
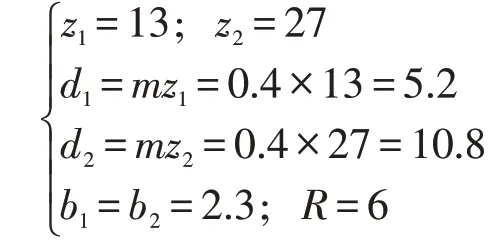
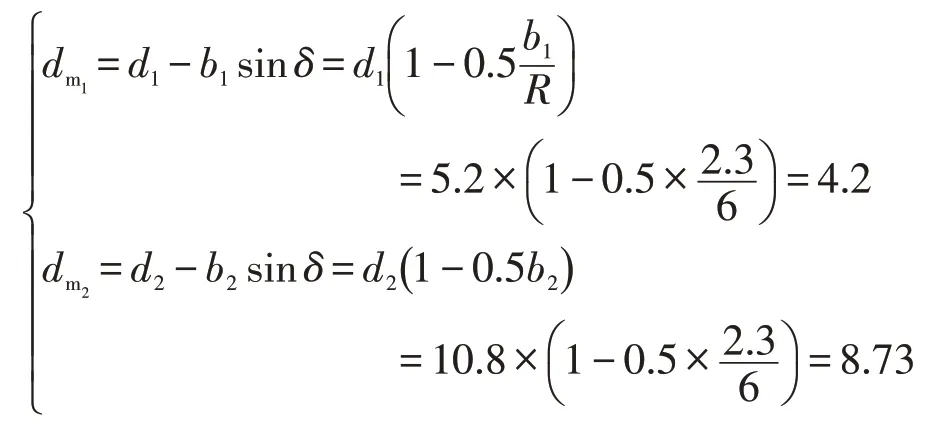
設絲桿上的錐齒為錐齒輪1,傳動軸上的錐齒輪為錐齒輪2。錐齒輪齒數分別為z1、z2,大端分度圓直徑分別為d1、d2,節錐角分別為δ1、δ2,齒寬為b1、b2,外錐距為R。數據如下:
錐齒輪傳動接觸面壓力中心點直徑設為dm,則可得:
齒面切向力Ft:
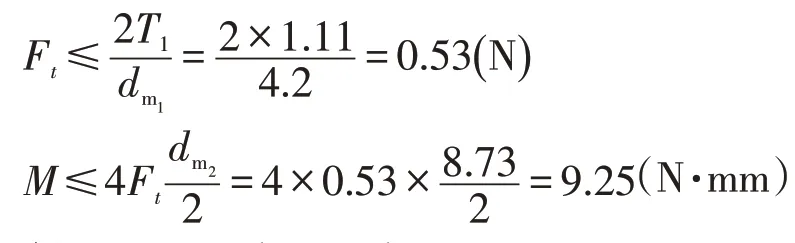
得Mmax=9.25(N·mm)。
考慮到套索傳動和錐齒輪傳動帶來的功率損失,以及手爪內部預留的空間位置,選用型號為STP-28D1012的28步進電機,該電機的扭矩為60 mN·m,具體參數如表6所示。
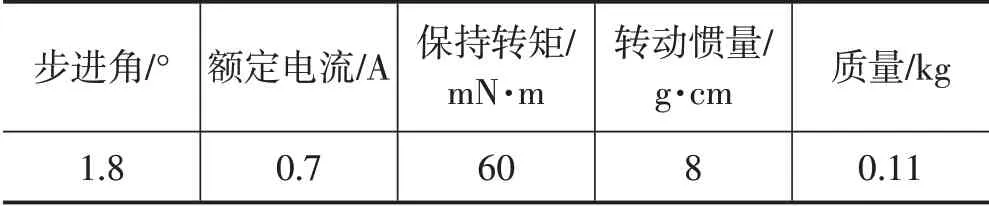
表6 STP-28D1012電機參數
4.3 鎖止模塊
鎖止模塊驅動載荷的設計計算,與縱移模塊類似,考慮鎖止螺釘的螺旋副。
單側螺釘扭矩:
T=50×2×
則負載扭矩Mmax=2T=59.58(N·mm)。
考慮到萬向軸傳動帶來的功率損失,選用型號為STP-28D2006的28步進電機,該電機的扭矩為110 mN·m,具體參數如表7所示。
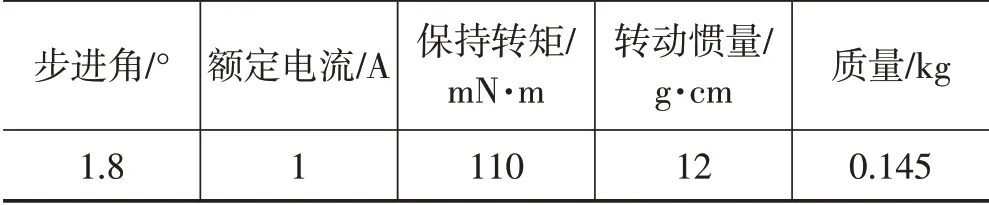
表7 STP-28D2006電機參數
4.4 旋轉模塊
旋轉模塊驅動的設計計算,主要考慮固定殼體與旋轉殼體間的摩擦力。當圓柱形殼體的中心軸線平行于水平面時,固定殼體側面承受手爪的全部重力(17.61 N),電機所需克服的摩擦力最大。
電機啟動時,需克服殼體間的靜摩擦力,此時的負載扭矩達到最大。
Ff=μFN≤G=17.61(N),
M≤Mmax=17.61×65.63=1 155.74(N·m)
行星齒輪副帶動整個殼體的旋轉,負載扭矩較大,而受手爪殼體內腔空間體積的限制,符合尺寸要求的電機無法滿足扭矩要求。因此,選用了型號為STP-28D3004的28步進電機(156 mN·m,是該尺寸系列電機的最大扭矩),見表8,搭配減速比為12的行星齒輪減速器,通過降低轉速的方式增大扭矩,設計過程如下:
負載扭矩/電機扭矩=7.41,考慮到電機扭矩應略大于負載扭矩(150%~200%),則減速器傳動比為:11.1~14,取 減 速 比k=12。輸 出 最 大 扭 矩:Mmax=156.12=1 872 m N·m。
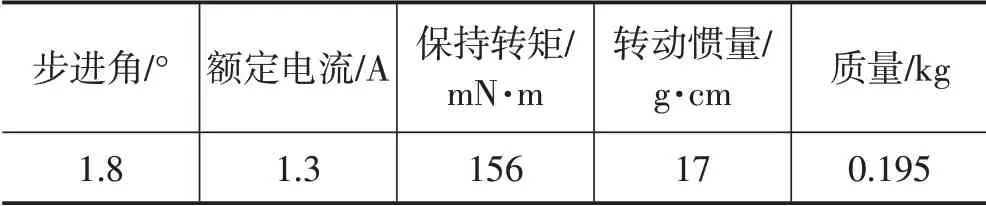
表8 STP-28D3004電機參數
5 結語
本文針對傳統柔性機械手的局限性提出了一種新型的自適應手爪,通過變距傳動機構、柔性鰭形結構、隨型變形扭簧實現每個手指擁有三自由度,更好地貼合物面,并且采用分流鎖止裝置實現兩側手指的同步鎖緊、松開。但至此只詳細設計了機械結構,對于控制、工業設計只有初步的規劃,還在進一步的完善中。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
