基于二階滑模控制的虛擬發(fā)電廠分層協(xié)同無功電壓控制策略
2020-11-18 08:09:26陳旗展張喜平阮志杰周哲民
可再生能源 2020年11期
陳旗展, 張喜平, 阮志杰, 劉 勁, 周哲民
(1.廣東電網(wǎng)有限責任公司中山供電局, 廣東 中山 528400; 2.清華大學 電機工程與應(yīng)用電子技術(shù)系, 北京100084)
0 引言
隨著分布式發(fā)電并網(wǎng)數(shù)量和容量的急劇上升, 可再生能源的并網(wǎng)管理難度和復(fù)雜度不斷增加,虛擬發(fā)電廠已經(jīng)成為應(yīng)對這種局面的有效技術(shù)[1],[2]。虛擬發(fā)電廠將不同形式的可再生能源統(tǒng)一為一個模塊,并輔之以必要的調(diào)峰設(shè)備、監(jiān)測保護裝置、能量管理系統(tǒng)以及需求側(cè)管理手段等智能模塊進行管理,能夠有效降低分布式發(fā)電并網(wǎng)對電力系統(tǒng)的沖擊[3]~[5]。虛擬發(fā)電廠須要進行電壓穩(wěn)定控制,以維持并網(wǎng)點的電壓穩(wěn)定性。
目前,已有較多文獻針對包括微電網(wǎng)、配電網(wǎng)以及分布式發(fā)電模塊在內(nèi)的小型供用電系統(tǒng)進行了電壓穩(wěn)定控制研究。文獻[6]針對風電場的并網(wǎng)電壓控制問題,所建立的模型考慮到了無功的時空分布特性。文獻[7]基于多代理系統(tǒng)建立了主動配電網(wǎng)分布式電壓控制策略,該策略基于分布式計算實現(xiàn)了網(wǎng)絡(luò)中各個節(jié)點的電壓最優(yōu),同時最大化可再生能源的消納率。文獻[8]針對負荷側(cè)的電壓,通過對無功就地補償設(shè)備制定合理的調(diào)節(jié)策略進行電壓控制,能夠維持負荷側(cè)的電壓穩(wěn)定。文獻[9]分析了大規(guī)模的分布式光伏集群并網(wǎng)接入電力系統(tǒng)后,對系統(tǒng)的電壓分布和穩(wěn)定性的影響。在此基礎(chǔ)上,文獻[10]提出了采用光伏逆變器調(diào)節(jié)并基于自適應(yīng)控制的分布式并網(wǎng)光伏電壓控制策略, 能夠有效應(yīng)對光照強度的波動性。 文獻[11]采用多智能體理論實現(xiàn)了配電網(wǎng)和虛擬發(fā)電廠的協(xié)同電壓控制, 但沒有充分發(fā)掘虛擬發(fā)電廠內(nèi)部的無功電壓調(diào)節(jié)資源。 虛擬發(fā)電廠的電壓隨著負荷水平、 系統(tǒng)無功消耗水平不斷產(chǎn)生波動,當電壓波動時,虛擬發(fā)電廠可以通過調(diào)用系統(tǒng)內(nèi)多種DG 逆變器的資源進行無功補償,維持電壓穩(wěn)定。 然而,目前還很少有文獻針對虛擬發(fā)電廠采用滑模控制建立其電壓控制模型。
本文針對含分布式發(fā)電并網(wǎng)的虛擬發(fā)電廠電壓控制問題, 基于二階滑模控制建立虛擬發(fā)電廠分層協(xié)同無功電壓控制策略。 首先基于DG 逆變器的下垂特性, 通過上層控制模塊對無功調(diào)節(jié)量進行分配; 然后通過下層控制模塊制定各個DG逆變器的二階滑模控制的等效控制策略; 最后通過算例, 驗證了所建立的控制策略對虛擬發(fā)電廠電壓控制的效果。
1 虛擬發(fā)電廠上層無功調(diào)節(jié)功率分配策略
1.1 DG 逆變器無功補償調(diào)節(jié)原理

圖1 DG 逆變器并網(wǎng)等值電路Fig.1 Grid connection equivalent circuit of DG inverter
虛擬發(fā)電廠中具備無功調(diào)節(jié)能力的逆變器并網(wǎng)等值電路如圖1 所示。圖中:Ui為逆變器輸出電壓;UPCC為DG 并網(wǎng)點電壓;ai為相角差;xi為逆變器電感;Pi和Qi分別為DG 逆變器的有功和無功出力。
通過并網(wǎng)點的潮流方程得到:

式中:S 為并網(wǎng)視在功率;P 為并網(wǎng)有功功率。
1.2 基于下垂特性的DG 逆變器無功調(diào)節(jié)量分配
在基于dq 坐標系同步PI 控制策略的基礎(chǔ)上,本文引入含下垂特性的電壓控制環(huán),實現(xiàn)了逆變器無功電流按實際容量合理分配, 具體控制框圖如圖2 所示。
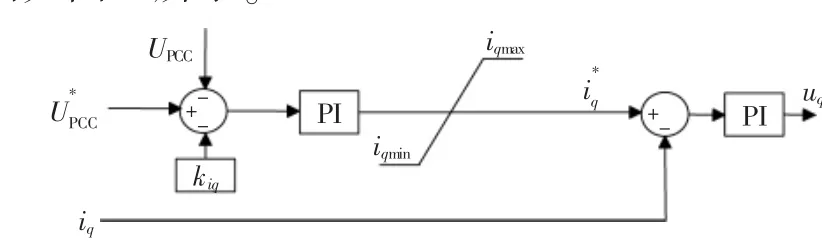
圖2 含下垂特性的DG 逆變器電壓控制環(huán)控制框圖Fig.2 Control block diagram of voltage control loop of DG inverter with droop characteristics

式中:ΔV為電壓變化量;ΔVq為基準電壓。
為了保證負載變化時各DG 逆變器無功出力的合理分配, 下垂系數(shù)取值應(yīng)與實時可輸出最大無功電流成反比[12]。

下垂系數(shù)特性如圖3 所示, 其中Δiq2和Δiq1分別為兩種下垂特性下的逆變器輸出無功電流調(diào)節(jié)量,Δiq2>Δiq1。

圖3 DG 逆變器無功調(diào)節(jié)功率分配下垂系數(shù)特性示意圖Fig.3 Droop characteristics of reactive power distribution of DG inverter
2 下層DG 逆變器無功出力滑模控制
2.1 DG 逆變器二階滑模控制
滑模控制是一種特殊的變結(jié)構(gòu)控制, 其控制系統(tǒng)“結(jié)構(gòu)”能夠跟隨DG 系統(tǒng)運行狀態(tài)的改變而改變[13],[14]。滑模控制的滑動特性是能夠設(shè)計的,并且在設(shè)計過程中不需要系統(tǒng)參數(shù), 具有很強的魯棒性,調(diào)節(jié)速度快。
通過非線性系統(tǒng)對虛擬發(fā)電廠進行建模,如下所示:

式中:x˙(t)∈Rn和u∈Rm分別為系統(tǒng)的狀態(tài)變量與控制輸入;f(t,x)∈Rn,g(t,x)∈Rn×m。
控制輸入u 的切換邏輯可表示為

式中:u+(t,x) 為正向控制量;u-(t,x) 為負向控制量;S(t,x)為滑模面函數(shù)。 以上3 個函數(shù)均為光滑連續(xù)函數(shù)。
滑模控制輸入u 為

式中:ueq為等效控制變量, 當滑模面函數(shù)的一階導數(shù)S˙=0,二階導數(shù)S¨≠0 時,滑模面函數(shù)S 的相對階為1,ueq由S˙=0 獲得;當S˙=0,S¨=0,三階導數(shù)S...≠0 時,S 的相對階為2,ueq由S¨=0 獲得。
本文使用二階滑模控制來設(shè)計Δu,該策略只需要滑模面的信息, 并且在滑模面的相對階為1時就可以直接使用,該算法具體可表示為。

2.2 滑模面的確定
滑模控制的目標是使并網(wǎng)換流器的輸出電流在滑模面上運動。 定義跟蹤誤差為

滑模控制的滑模面可表示為式(17),其中的元素如式(18)所示。 引入積分項可以消除DG 逆變器系統(tǒng)的靜態(tài)誤差, 并能夠提高系統(tǒng)的響應(yīng)速度。

式中:Kα,Kβ分別為DG 逆變器系統(tǒng)α,β 軸的積分系數(shù),均為正實數(shù)。
2.3 DG 逆變器控制策略
滑模控制器的控制變量為并網(wǎng)逆變器的輸出電壓,表示為

式 中:ΔUcα,ΔUcβ分 別 為α,β 軸 的 開 關(guān) 控 制;Ucα_eq,Ucβ_eq分別為α,β 軸的等效控制輸出。

式中:Fα和Fβ分別為滑膜面函數(shù)的α,β 軸基準分量;L1為逆變器電感系數(shù);Kα和Kβ分別為α,β 軸誤差增益系數(shù);eα和eβ分別為α,β 軸誤差。
由式(24),(25)得到:

3 仿真算例
為了驗證所建立的模型對虛擬發(fā)電廠電壓控制的有效性,在Matlab/Simulink 仿真平臺上搭建如圖4 所示的虛擬發(fā)電廠系統(tǒng)進行仿真。 該虛擬發(fā)電廠額定電壓為380 V, 系統(tǒng)中并網(wǎng)接入了多種分布式發(fā)電設(shè)備, 包括微燃機(Microturbine,MT)、 燃料電池 (Fuel Cell, FC)、 分布式風電(Wind Turbine, WT)、 分布式光伏(Photovoltaic Cell, PV)、分布式儲能(Energy Storage, ESS)和并網(wǎng)負荷。 其中,光伏逆變器和儲能逆變器在系統(tǒng)電壓波動時進行無功補償調(diào)節(jié),其余分布式發(fā)電設(shè)備不參與調(diào)節(jié)。

圖4 虛擬發(fā)電廠網(wǎng)架結(jié)構(gòu)圖Fig.4 Grid structure of virtual power plant
分布式光伏和儲能設(shè)備的參數(shù)如表1 所示。二階滑模控制模型中的參數(shù)如表2 所示。

表2 滑模控制器參數(shù)Table 2 Parameters of sliding mode controller
為了驗證本文所建立的模型相比于傳統(tǒng)控制策略的優(yōu)勢, 采用兩種方式對同一個虛擬發(fā)電廠以及電壓控制場景進行控制,其中:場景一的下層模型為采用傳統(tǒng)的PI 控制,上層按照逆變器容量比進行無功調(diào)節(jié)量分配; 場景二為采用本文基于二階滑模的分層協(xié)同控制策略。 當虛擬發(fā)電廠中發(fā)生無功負荷變化、變壓器檔位變化、無功補償設(shè)備運行變化時, 會導致系統(tǒng)無功功率增加或者減少。 假設(shè)虛擬發(fā)電廠運行在t=0 s 時,系統(tǒng)無功功率出力和負荷均為14.67 MVar; 當運行到t=1.0 s時, 系統(tǒng)因為負荷特性的變化產(chǎn)生了初始電壓正偏差0.03 p.u;當運行到t=2.0 s 時,系統(tǒng)又一次因為負荷特性的變化產(chǎn)生了初始電壓負偏差0.06 p.u。在秒級尺度的時間內(nèi)能夠?qū)μ摂M發(fā)電廠電壓產(chǎn)生波動的只有負荷波動, 因此不考慮光照強度的影響。
在場景一下可以得到虛擬發(fā)電廠運行期間分布式光伏和儲能逆變器的無功調(diào)節(jié)量分配以及系統(tǒng)運行期間虛擬發(fā)電廠母線電壓水平, 分別如圖5,6 所示。

圖5 場景一分布式光伏和儲能逆變器的無功調(diào)節(jié)量分配Fig.5 Distribution of reactive power regulation of scenario I distributed photovoltaic and energy storage inverter

圖6 場景一虛擬發(fā)電廠運行期間母線電壓水平變化Fig.6 Bus voltage level change during operation of scenario I virtual power plant
從圖5 和圖6 可以看出,在場景一下,由于分布式光伏和儲能逆變器對無功調(diào)節(jié)量簡單地采用容量比例進行分配,使得下垂系數(shù)更大,即調(diào)節(jié)響應(yīng)速度更快的逆變器無法充分發(fā)揮調(diào)節(jié)作用,因此光伏和儲能的無功調(diào)節(jié)出力響應(yīng)較慢。 在電壓曲線上,由于PI 是有差調(diào)節(jié),因此圖6 中僅依靠光伏和儲能逆變器的PI 調(diào)節(jié)并不能使電壓恢復(fù)到初始狀態(tài),還需要其他電壓控制手段進行恢復(fù)。
同理, 在場景二下可以得到虛擬發(fā)電廠運行期間分布式光伏和儲能逆變器的無功調(diào)節(jié)量分配以及系統(tǒng)運行期間虛擬發(fā)電廠母線電壓水平,分別如圖7,8 所示。

圖7 場景二分布式光伏和儲能逆變器的無功調(diào)節(jié)量分配Fig.7 Distribution of reactive power regulation of scenario II distributed photovoltaic and energy storage inverter

圖8 場景二虛擬發(fā)電廠運行期間母線電壓水平變化Fig.8 Bus voltage level change during operation of scenario II virtual power plant
從圖7 和圖8 可以看出,在場景二下,由于分布式光伏和儲能逆變器對無功調(diào)節(jié)量的分配依據(jù)上層控制模塊的下垂特性, 因此使得下垂系數(shù)更大, 即調(diào)節(jié)響應(yīng)速度更快的逆變器可以分配到更大的調(diào)節(jié)容量,充分發(fā)揮其調(diào)節(jié)特性。下層控制模塊采用二階滑模控制作為誤差調(diào)節(jié), 在光伏和儲能逆變器無功調(diào)節(jié)后, 系統(tǒng)電壓水平恢復(fù)到了初始狀態(tài),具備更優(yōu)的電壓穩(wěn)定性。兩種場景下電壓控制指標對比如表3 所示。

表3 兩種場景下無功電壓控制指標對比Table 3 Comparison of reactive power and voltage control indexes in two scenarios
從表3 中可以看出: 相比于傳統(tǒng)的PI 控制,基于二階滑模控制的分層協(xié)同電壓控制策略將穩(wěn)態(tài)進入時間從267 ms 減少為186 ms; 將最大電壓偏差從0.038 4 p.u 降低為0.016 3 p.u,下降幅度為57.55%;電壓偏差均方根從0.035 6%降低為0.014 9%,降低程度為0.020 7 個百分點。
4 結(jié)論
本文針對含分布式發(fā)電并網(wǎng)的虛擬發(fā)電廠電壓控制問題, 基于二階滑模控制建立了虛擬發(fā)電廠分層協(xié)同無功電壓控制策略。仿真算例表明:本文建立的虛擬發(fā)電廠分層協(xié)同無功電壓控制策略能夠依據(jù)下垂特性將電壓波動期間無功調(diào)節(jié)量合理分配給不同的DG 逆變器, 充分發(fā)揮DG 逆變器的響應(yīng)特性;相比于傳統(tǒng)的PI 控制,二階滑模控制能夠降低響應(yīng)速度, 在減少DG 逆變器無功調(diào)節(jié)幅度的同時無差地恢復(fù)電壓初始水平。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:48
小獼猴智力畫刊(2022年3期)2022-03-28 21:52:55
瘋狂英語·初中天地(2021年4期)2021-06-09 06:50:54
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年6期)2016-04-20 06:21:47
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
電測與儀表(2014年17期)2014-04-04 11:56:50