大行程X-Y二維微動工作臺的設計與減耦
2020-11-20 23:57:34王禎妍
裝備維修技術 2020年11期
王禎妍
摘要:設計了一種新型大行程X-Y二維微動工作臺并完成減耦。該工作臺采用壓電驅動器提供微位移,串聯構型與柔性鉸鏈、杠桿機構配合,實現二維大行程位移輸出。利用有限元仿真調節傳動鉸鏈的位置,結合雙平行四桿柔性移動副實現X和Y方向的運動解耦。仿真結果表明,該微動臺的工作行程為370 μm×400 μm, X與Y向的耦合誤差均小于1%。該微動臺具有運動行程大、耦合誤差小等優點,可與宏動機構配合用于大行程二維宏微定位等場合。
關鍵詞:大行程微動工作臺;雙平行四桿機構;運動解耦;有限元分析
1 前言
當前,超精密加工技術在精密儀器儀表[1-2]、生物醫學工程[3]、集成電子[4-5]、先進制造業等領域具有廣泛應用。微納米定位技術及系統作為超精密加工的重要研究內容之一,在微納米坐標測量機[6]、原子力顯微鏡和衍射光柵刻劃機等儀器設備中取得了極大的進展,開發大行程高精度的微定位系統已成為相關領域科研人員研究的熱點。
國內外對一維、二維微動工作臺已進行了大量研究工作,但行程較小,在某些需要大行程微動臺的場合應用受限。因此,以壓電陶瓷為微位移器件,通過柔性鉸鏈、杠桿、雙平行四桿機構配合,設計了一種新型大行程X-Y二維微動工作臺,借助有限元分析,減小了不同方向運動間的耦合。
2 二維微動工作臺的設計
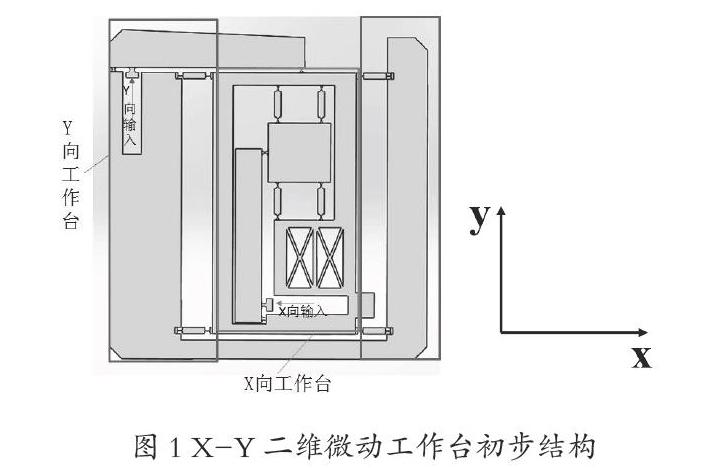
初步設計的X-Y二維微動工作臺結構示意圖如圖1所示。由壓電陶瓷驅動,采用柔性鉸鏈傳動和杠桿放大,實現大行程位移輸出。設計串聯構型,結構緊湊,但存在不可避免的耦合誤差,因此采用雙平行四桿機構,有效減小工作臺的耦合。
3 Y向運動中消除耦合的研究
3.1串聯構型存在角位移和線位移耦合
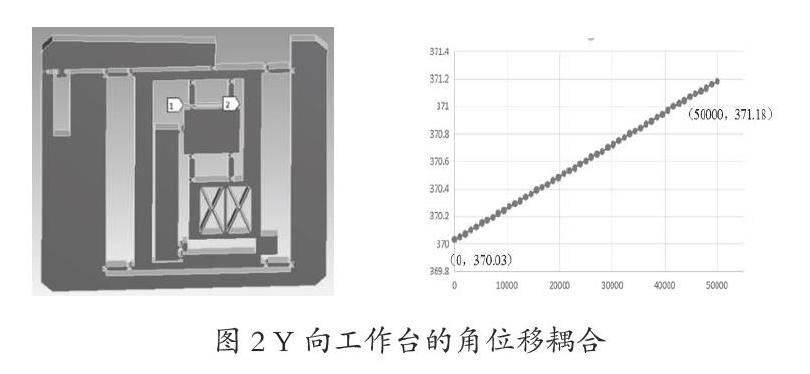
對初步設計的工作臺進行Y向運動的有限元仿真,得到工作臺平行于X軸的端面由1到2各點處Y向位移均不相同,即存在角位移耦合,如圖2所示。同時發現工作臺Y向運動時的X向位移不為零,即存在線位移耦合。耦合運動可導致工作臺輸出位移的精度大大降低。
3.2角位移和線位移耦合的原因及消除方法
將耦合可能的原因歸為:一是整體工作臺是非對稱結構,二是杠桿的彎曲形變導致傳遞位移存在X向分量。通過改變N鉸鏈的位置消除結構不對稱所產生的耦合,通過增加杠桿剛度消除杠桿彎曲形變所產生的耦合。目前工作臺的Y向杠桿已達到最小彎曲,下面主要通過改變N鉸鏈位置進行耦合誤差的消除。從大量的模擬分析中發現,N鉸鏈在不同位置時工作臺角位移和線位移耦合正負方向均發生了改變,推測存在兩個N鉸鏈的位置,分別使工作臺Y向運動的角位移和線位移耦合為零。
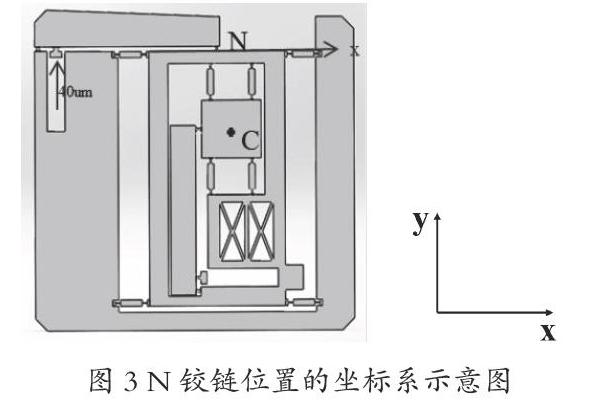
如圖3所示建立N鉸鏈移動位置的一維X坐標系,得到幾個N鉸鏈位置坐標與相應的角位移耦合繪制如圖4所示折線圖。根據圖4中角位移為0時橫坐標的取值估算N鉸鏈此時的位置坐標在39000 μm附近,得到如表1所示結果。
考慮加工方便,取N鉸鏈位置坐標為40000 μm,X-Y二維微動工作臺Y向運動時的角位移耦合最小。采用同樣的方法確定線位移耦合最小時的N鉸鏈位置,并利用有限元仿真,在兩個位置之間尋找Y向整體位移耦合最小的位置,如圖5所示,其運動參數如表2所示。
4二維X-Y微動臺模型及仿真結果
將Y向N鉸鏈由單軸改為雙軸,減小杠桿彎曲。并將X向結構參照Y向結構進行優化,得到最終X-Y二維微動工作臺結構如圖6所示。為更直觀的表達二維工作臺中的角位移耦合,將角位移耦合的參數由位移量換算為角度。工作臺總體參數如表3所示。
5 結論
設計了一種壓電陶瓷驅動的新型X-Y二維微動工作臺,采用柔性鉸鏈與杠桿放大實現二維大行程位移輸出。利用有限元仿真尋找傳動鉸鏈最佳位置,結合雙平行四桿柔性移動副實現X和Y方向的運動解耦。仿真結果表明,該微動工作臺的工作行程為370 μm×400 μm,X與Y向的耦合誤差均小于1%。該工作臺結構緊湊、運動行程大、耦合誤差小,對納米科技、半導體、精密機械加工及測量等領域均有參考價值。
6 參考文獻
[1]Nicolas Bonnail, Didier Tonneau, Franck Jandard, Gérard-André Capolino and Hervé Dallaporta. Variable Structure Control of a Piezoelectric Actuator for a Scanning Tunneling Microscope[J]. IEEE Transactions on Industrial Electronics, 51(2), 354–363.
[2]Yongkai Xu and Peter H. Meckl. Robust Time-Optimal Command Shaping for Velocity Tracking of Piezoelectric Actuators[J]. Proceedings, 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.
[3]S. Thalhammer, G. Lahr, A. Clement-Sengewald, W. M. Heckl, R. Burgemeister and K. Schütze. Laser microtools in cell biology and molecular medicine[J]. Laser Physics, Vol. 13, No. 5, 2003, pp. 681.
[4]M. Puig-Vidal, J. López-Sánchez, P. Miribel-Català, E. Montané, S.A. Bota, J. Samitier,U. Simu and S. Johansson. Smart Power Integrated Circuits to Drive Piezoelectric Actuators for a cm3? Microrobot System[J]. Proceedings of SPIE Vol. 4334 (2001).
[5]Spanner, K., Marth, H. and Gutheil, W. Piezoelectric Translators with Submicron Accuracy[J]. SPIE Vol. 565 Micron and Submicron Integrated Circuit Metrology (1985).
[6]K C Fan, Y T Fei, X F Yu, Y J Chen, W L Wang, F Chen and Y S Liu. Development of a low-cost micro-CMM for 3D micro/nano measurements. Meas. Sci. Technol. 17 (2006) 524–532.
