玉米行間滾輪式穴施排肥器設計與試驗
2020-11-24 13:16:54謝東波陳黎卿
農業機械學報 2020年11期
萬 玲 謝東波 李 楊 陳黎卿
(1.安徽農業大學工學院, 合肥 230036; 2.安徽省智能農機裝備工程實驗室, 合肥 230036)
0 引言
玉米是我國三大糧食作物之一[1]。玉米在大喇叭口時期的追肥是玉米穩產、增產的重要保障措施之一,也是目前機械化作業的難題之一。在作物的穴施肥方面國內外學者開展了許多研究。如劉正道等[2]根據穴式施肥可有效提高肥料利用率的特性,設計了一種用于顆粒狀肥料穴式施用的腔盤式精量穴施肥裝置;袁文勝等[3]為提高肥料利用率、降低生產成本,設計了一種勺輪式穴施肥排肥器;王金武等[4]針對水稻直播施肥過程中存在肥料用量大、化肥利用率低等問題,設計了水稻精量穴直播機。研究表明[5-8],在現階段對穴施機扎穴機構和排肥機構的設計仍是研究的重點。
玉米在大喇叭口時期的追肥對提高玉米生產率意義重大,采取穴施肥方式可有效提高肥料利用率,減小環境污染。根據該時期的玉米施肥農藝要求(追肥深度8~10 cm),國內外專家進行了諸多研究,并設計了樣機。胡紅等[9-10]設計了一種玉米行間定點扎穴深施追肥機,對定點機構、扎穴等進行了詳細的分析和闡述;吳然然等[11]根據穴施機械行走方式,采用曲柄搖桿機構研制出一種玉米中期穴施肥裝置;鄭媛媛[12]針對目前玉米中期追肥技術較落后、機械化水平低的問題,研制了一款電力驅動的新型行間中期追肥機。相關學者對玉米中期機械施肥開展了很多研究,但玉米中后期根系較多,且土壤硬度大,受玉米行間距限制,大型機械行走困難,對玉米中期穴施機仍然需要進一步研究。
本文針對黃淮海地區夏玉米中期追肥問題,設計一種滾輪式穴施排肥器,在此基礎上設計微型玉米中期施肥機。
1 結構與工作原理
1.1 整機結構
玉米行間穴施肥機主要由機架、電動機、蓄電池及控制器、驅動輪和兩個滾輪式穴施排肥器等組成,如圖1所示。機具設計有獨立的動力系統,機具在田間作業時,動力由蓄電池提供。電機及減速器經過選型匹配,滿足穴施肥要求。田間作業時,操作者可通過調節控速把手轉動角度從而調節直流電機的電流實現變速。機具在施肥作業時,滾輪式穴施排肥器同步機具速度進行穴施肥。穴施肥深度可以在作業前通過調節液壓裝置的阻尼改變。
1.2 穴施排肥器結構
滾輪式穴施排肥器主要由固定端扁嘴、旋轉端扁嘴、前端蓋、儲肥盒、分離杠桿、滾動軸承、凸輪和后端蓋等組成,如圖2所示。
1.3 工作原理
滾輪式穴施排肥器在工作時依靠液壓系統的壓力以及自身重力完成扎穴入土工作。在工作時,滾輪式穴施排肥器作逆時針滾動運動,固定在穴施排肥器上的儲肥盒對穴施排肥器中的肥料實現擾動功能,其固定在機架上的凸輪及滾動軸承被動撥動分離杠桿使旋轉端穴施排肥器繞旋轉軸運動打開扁嘴進行排肥。成穴器離開土壤時旋轉端扁嘴打開進行排肥作業,以減小旋轉端成穴器打開的阻力。當分離杠桿與凸輪軸承不接觸時,旋轉端扁嘴由于回位彈簧的作用急速回位,閉合止肥。
1.4 成穴器運動特性分析
滾輪式穴施排肥器工作時,是旋轉運動和直線運動的合成。以滾輪式穴施排肥器滾筒軸旋轉中心O為原點建立坐標系,橫坐標軸X正向與穴施機前進方向一致,縱坐標軸Y正向與穴施機前進方向垂直向上。設穴施機前進速度為v,滾輪式穴施排肥器旋轉角速度為ω,建立坐標系;取其中一個成穴器建立運動方程
xA=rcos(ωt)+vt
(1)
yA=rsin(ωt)
(2)
式中xA——滾輪式穴施排肥器A點運動軌跡的瞬時橫坐標,mm
yA——滾輪式穴施排肥器A點運動軌跡的瞬時縱坐標,mm
r——滾輪式穴施排肥器轉動半徑,mm
t——時間,s
對式(1)、(2)求一階導數,可得速度
(3)
(4)
滾輪式穴施排肥器頂端絕對速度為

(5)
預設滾輪式穴施排肥器作業一周能完成6株玉米施肥,成穴器完成穴施作業主要分為5個步驟:入土、成穴、打開、落肥、閉合離土。成穴器一個完整的運動周期如圖3所示。
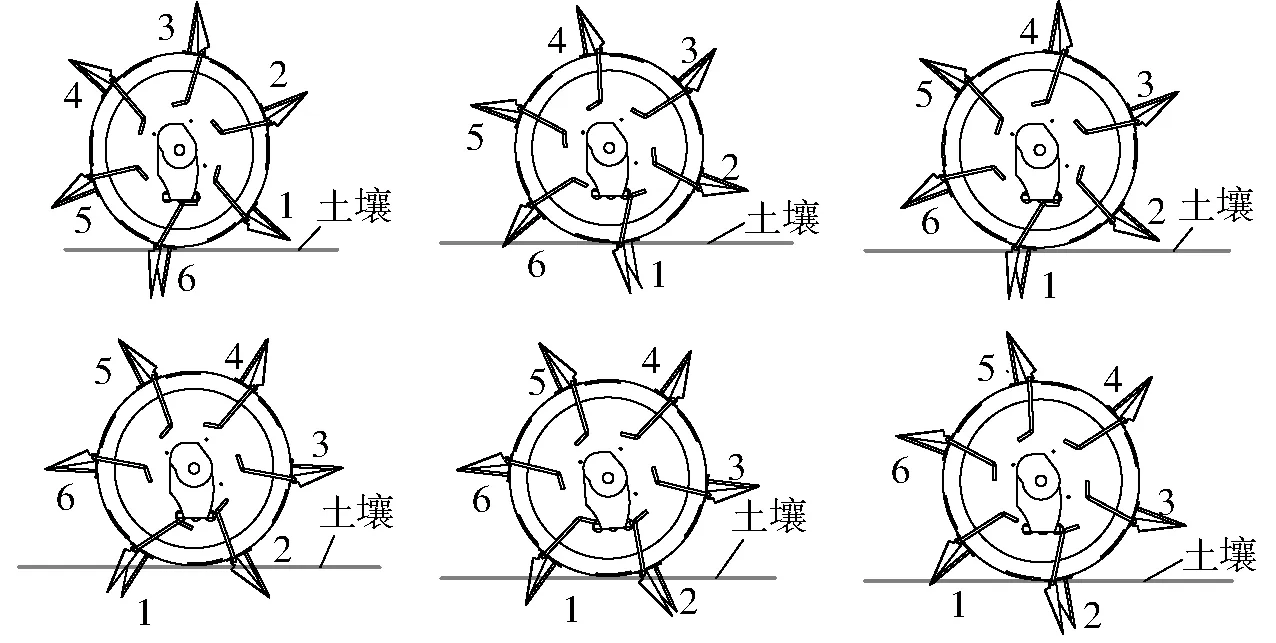
圖3 成穴器運動時序圖Fig.3 Time sequence diagram of motion of hole-forming device
成穴器在分離杠桿接觸凸輪時打開且每個成穴器均配套單獨的分離杠桿,運動過程中不存在重合和干擾。如圖4所示,位置1為成穴器扎穴后即將打開時的位置,位置2為同一成穴器即將閉合時的位置,A、B分別為兩個位置下成穴器底座中心點,O為穴施排肥器中心點。在進行凸輪結構設計時,作如下要求:α>β,延遲閉合,保證肥料全部落入穴坑內;β=20°時,分離杠桿接觸凸輪;α=25°時,分離杠桿即將脫離凸輪。即穴施排肥器轉過45°時,成穴器完成張開至閉合過程。

圖4 成穴器工作位置分析圖Fig.4 Analytical diagram of working position of hole-forming apparatus
2 關鍵參數設計
2.1 穴施排肥器半徑
黃淮海地區農藝要求玉米行距600 mm、株距200 mm,假設滾輪式穴施排肥器運動一周,完成6株玉米的施肥作業,如圖5所示。當進行側方位施肥時,穴施排肥器每個成穴器需對靶施肥,滾輪式穴施排肥器1/6圓周長應等于玉米株距,即
(6)
式中r——滾輪式穴施排肥器半徑,mm
L——玉米株距,mm
經求解,確定滾輪式穴施排肥器半徑為191 mm。
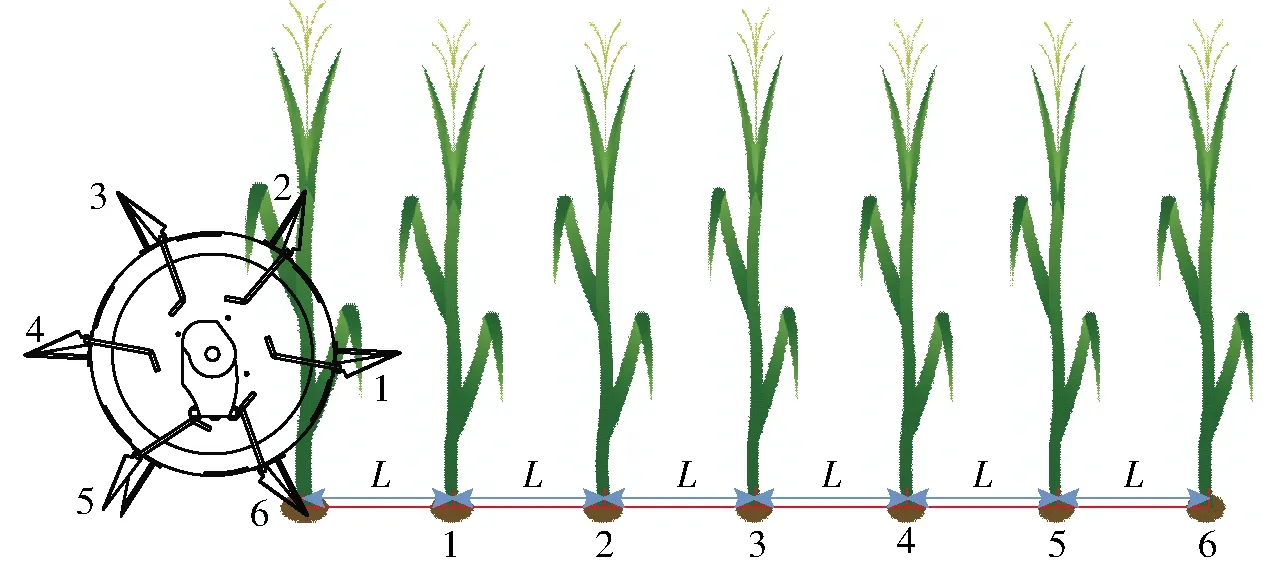
圖5 穴施排肥器追肥點定位簡圖Fig.5 Positioning diagram of topdressing point of hole fertilizer applicator
2.2 施肥位置設計
玉米行間穴施肥機所施肥料與玉米植株相對位置關系主要由橫向間距l和離地高度H來表示,如圖6所示。按照農藝要求,玉米中期追肥應在玉米植株側方位100 mm≤l≤150 mm穴施,施肥深度80 mm≤H≤100 mm為宜。本文采用直接定位法完成穴施,穴施機在理想工作條件下無路徑偏移,農機農藝融合,玉米株距保持在200 mm時,由于滾輪式穴施排肥器轉動60°即完成相對應的玉米植株施肥動作,操作者確定第一株施肥點正確位置,即可保持對靶施肥。
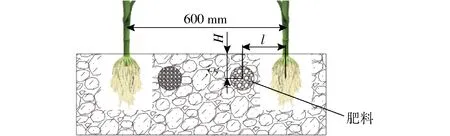
圖6 肥料與玉米植株相對位置關系示意圖Fig.6 Relative position schematic of fertilizer and corn plants
2.3 成穴器尺寸設計
根據穴施要求,選擇扁嘴型成穴器,成穴器剖面圖如圖7所示。
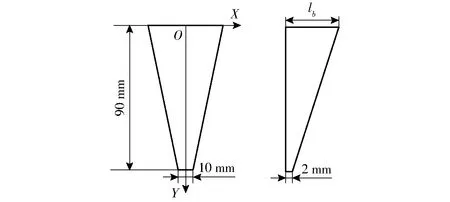
圖7 成穴器剖面圖Fig.7 Sectional drawing of cavity maker
采用微分法計算成穴器內肥量,令h為成穴器高度變量,dh則為沿垂直方向的高度微單元。成穴器的總容積為
(7)
式中V——成穴器總容積,cm3
lb——成穴器底面邊長,mm
此處取lb=25 mm,則V≈23 cm3,約為每穴需要肥量的3倍。
2.4 液壓系統設計
滾輪式穴施排肥器在工作時依靠液壓系統的壓力以及自身重力完成扎穴入土工作。在整機設計中,需要將排肥器置于行走裝置后方以平衡穴施機行走過程中產生的后傾危險,設計的杠桿結構如圖8所示。
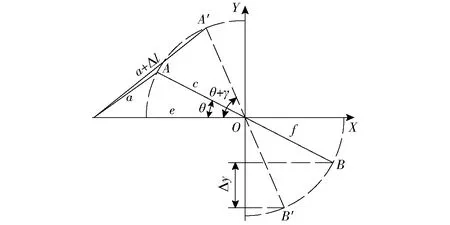
圖8 穴施排肥器杠桿結構簡圖Fig.8 Structural diagram of hole fertilization
AB為穴施排肥器入土前杠桿初始位置,A端受液壓裝置驅動,B端為穴施排肥器中心。液壓裝置驅動杠桿繞O順時針旋轉使穴施排肥器產生向下位移,垂直位移應與扎穴深度相同。假設A′B′為完成扎穴運動后的杠桿位置,此時應滿足幾何關系
(8)
Δy=fsin(θ+γ)-fsinθ
(9)
式中a——液壓桿初始長度,mm
Δl——液壓桿拉伸長度,mm
e——液壓桿固定端距旋轉中心長度,mm
c——杠桿液壓端長度,m
f——杠桿穴施排肥器端長度,mm
θ——杠桿與旋轉中心平面初始夾角,(°)
γ——旋轉角位移,(°)
結合上述分析和整機的結構要求,設計液壓系統結構如圖9所示。
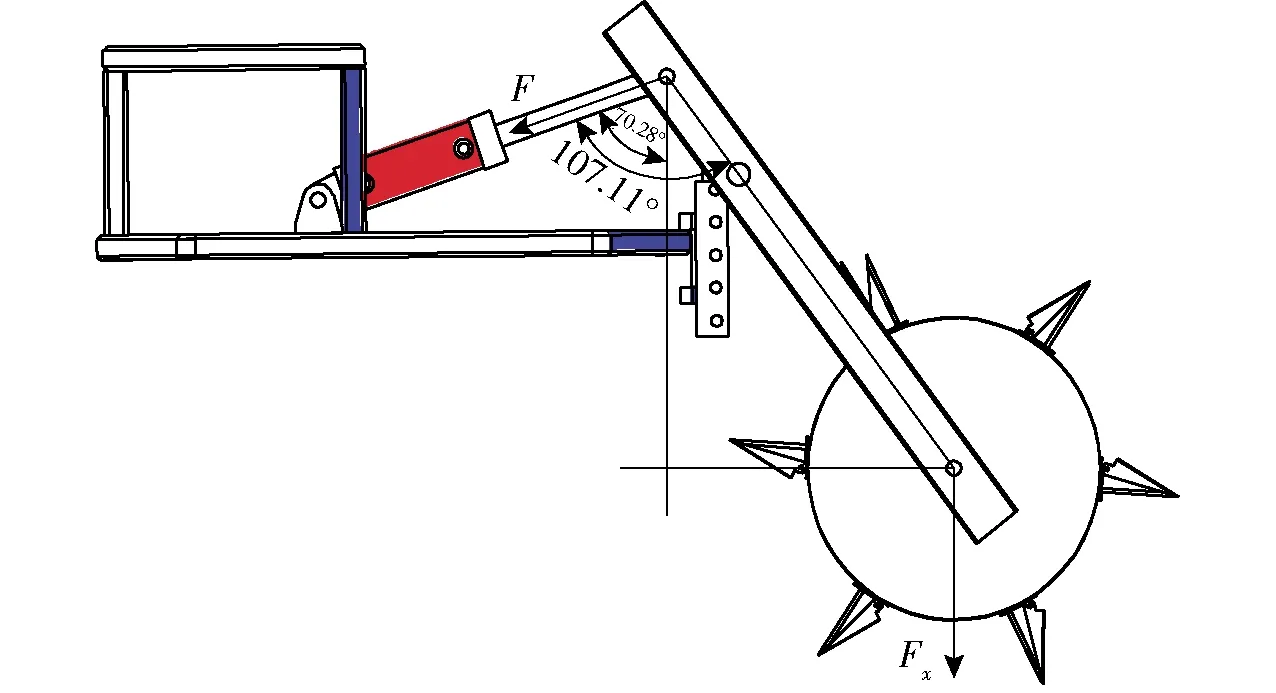
圖9 穴施排肥器受力分析Fig.9 Stress analysis of hole fertilizer applicator
滿足運動學要求的同時,液壓系統也應提供足夠的動力使穴施排肥器完成扎穴。在不考慮機具本身質量的情況下,根據扎土壓力對液壓系統進行受力分析得出
(10)
(11)
式中F——液壓系統提供的壓力,N
Fx——扎土壓力,N
P——液壓系統載荷,MPa
d——液壓桿直徑,mm
3 性能仿真分析
3.1 成穴性能分析
為了分析成穴性能,基于Abaqus軟件構建穴施機構動力學模型,分析成穴器受力情況和入土效果[13]。將穴施排肥器三維模型導入Abaqus軟件,土壤模型使用900 mm×200 mm×100 mm長方體模擬,成穴器底面與土壤間隔5 mm作為余量,保證底面不與土壤接觸;成穴器材料為40Cr,穴施排肥器前后端蓋為PC通用材料,土壤密度2.68 g/cm3,土壤膨脹角由彈塑性法標定,Drucker Prager硬化類型為壓縮,土壤模型參數[14]設置如表1所示。穴施排肥器運動設置沿X軸負方向以2 m/s移動,并產生繞Z軸沿順時針方向的轉動。在穴施排肥器中心建立與穴施排肥器幾何模型耦合的參考點,對其施加X軸負向速度模擬拖動效果,并釋放Z軸旋轉自由度。土壤沿Z軸兩側平面設置對稱約束,沿X軸兩側平面設置全自由度約束。穴施排肥器和土壤都采用八結點線性六面體減縮積分單元C3D8R,對土壤進行沙漏能增強和網格加密,劃分后的裝配體網格如圖10所示,共包含517 237個單元,649 102個結點,其中土壤含有281 250個網格單元。采用Abaqus動力顯式分析步模擬大位移問題。
為了提高運算速度,在分析步中對動力學模型進行局部質量放大,該模型主要研究對象為土壤成穴情況和成穴器受力情況,因此對穴施排肥器滾輪網格進行放大,采用固定穩定增量時間方法,將穩定增量時間放大為3×10-5s。在Abaqus顯式分析中,前期設置了網格沙漏能控制單元,為了評估該控制是否得到了理想的響應,提出沙漏能(ALLAE)與內能(ALLIE)比值判斷法,圖11是能量比值仿真結果,當仿真結果小于0.05時,說明沙漏能控制良好,仿真結果可以使用。由圖11可知,仿真結果均在0.05以內,且逐漸趨于穩定。
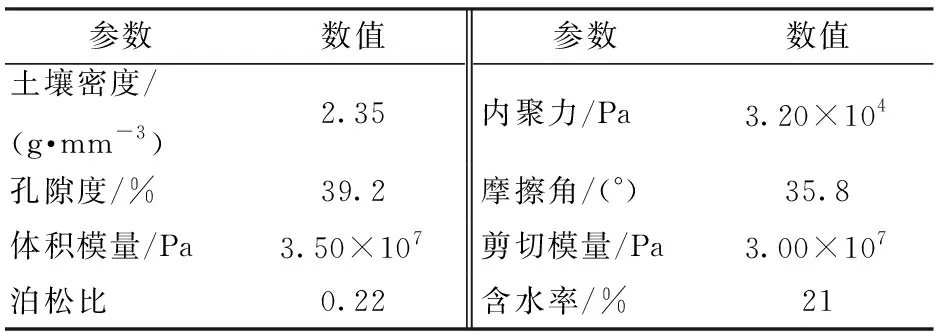
表1 土壤參數Tab.1 Soil parameters
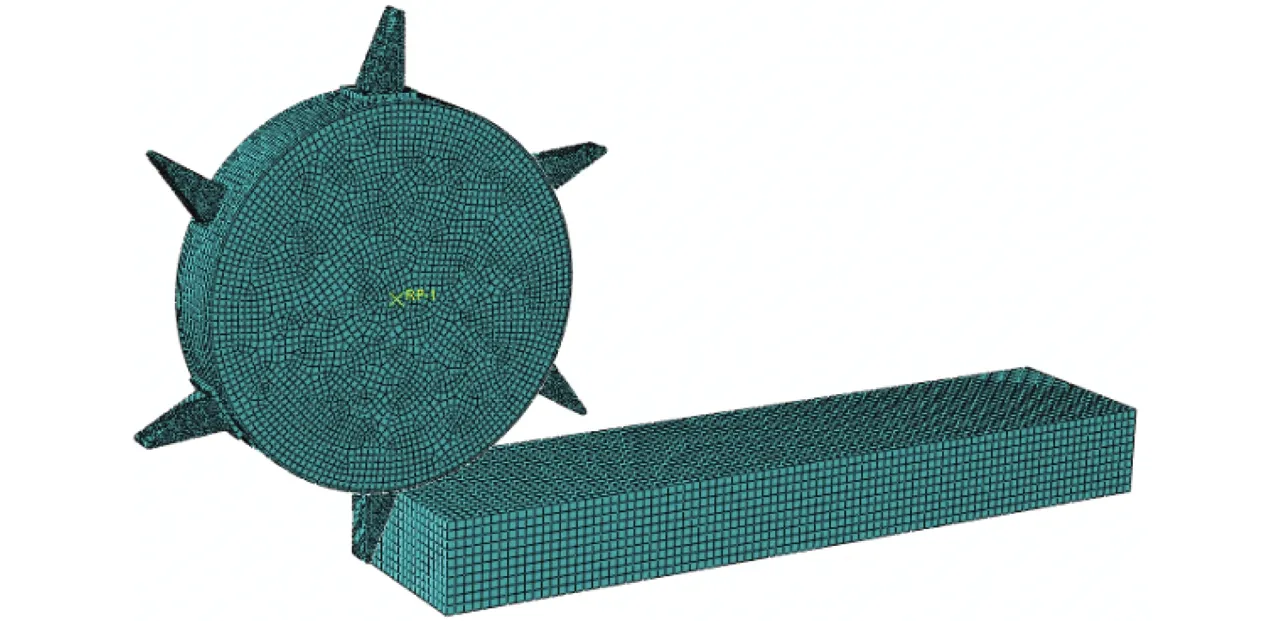
圖10 穴施排肥器-土壤裝配體網格Fig.10 Hole applicator-soil finite element model
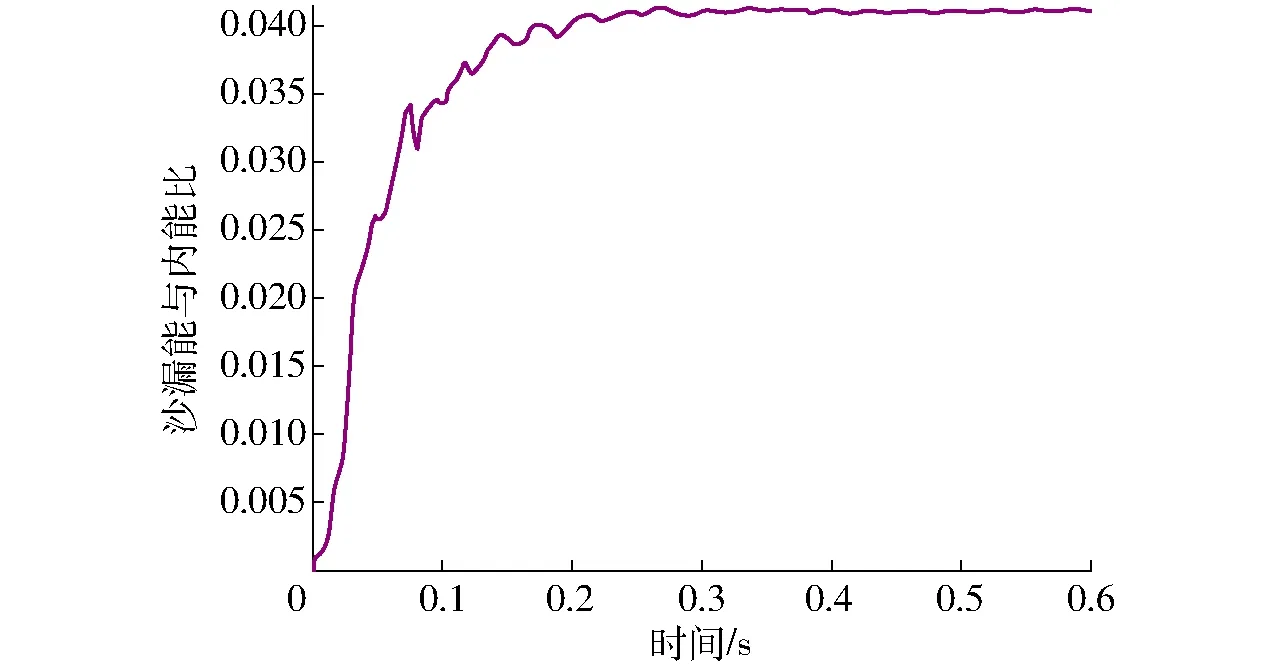
圖11 沙漏能內能比變化曲線Fig.11 Change curve of ratio of hourglass energy and internal energy
在仿真時間內,穴施排肥器在模型土壤上成穴3個,成穴效果如圖12所示。
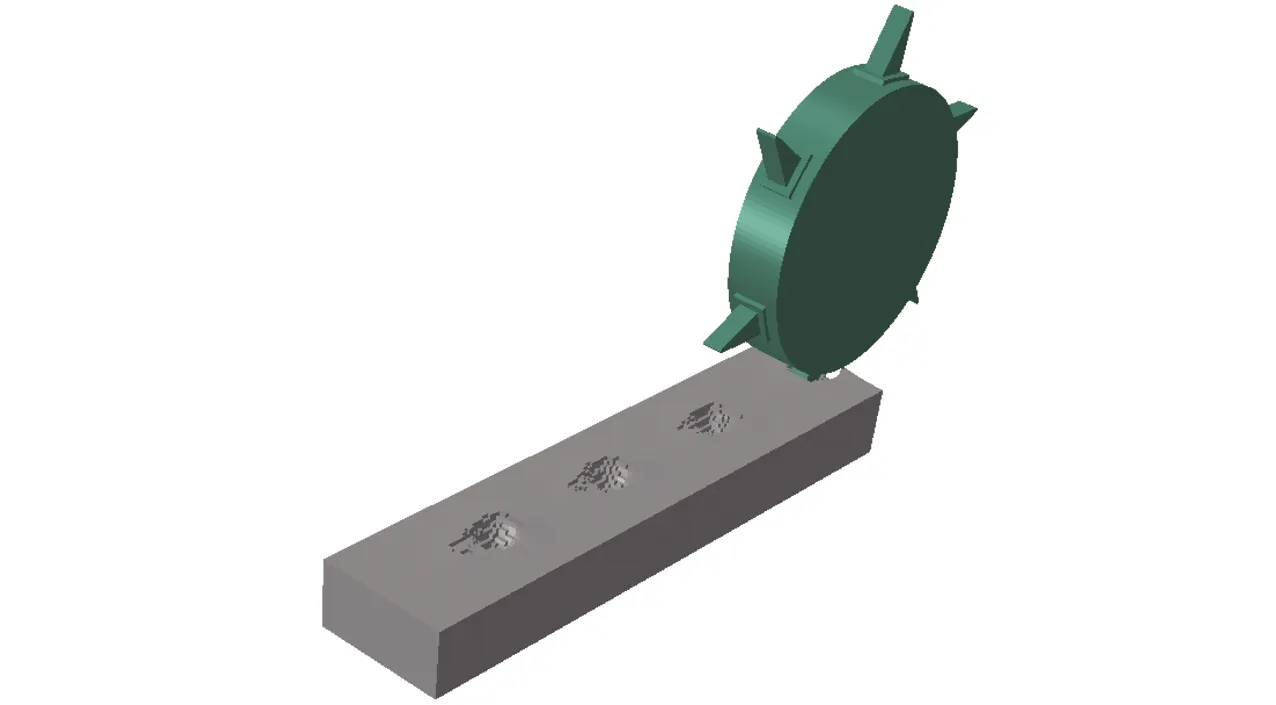
圖12 穴施排肥器成穴效果圖Fig.12 Effect diagram of hole forming of hole fertilizer applicator
由圖12可以看出,成穴器均可完成成穴過程,在后處理中對扎穴后的土壤切割,如圖13所示,Q點為仿真穴坑最低點;O點為Q點豎直方向與土壤平面的交點;P點為相鄰穴坑最低點豎直方向與土壤平面交點。經過測量3個穴坑的OQ長度平均值為85 mm,OP長度平均值為210 mm。
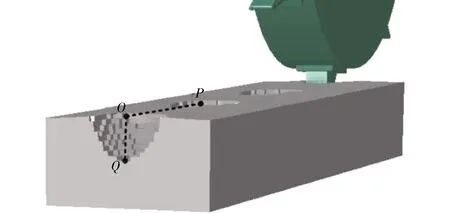
圖13 穴施排肥器成穴剖視圖Fig.13 Hole forming section of hole fertilizer applicator
在Abaqus后處理中提取扁嘴型成穴器底面受力,以穴施機扎出的第1個穴坑為例,扎穴阻力如圖14所示。
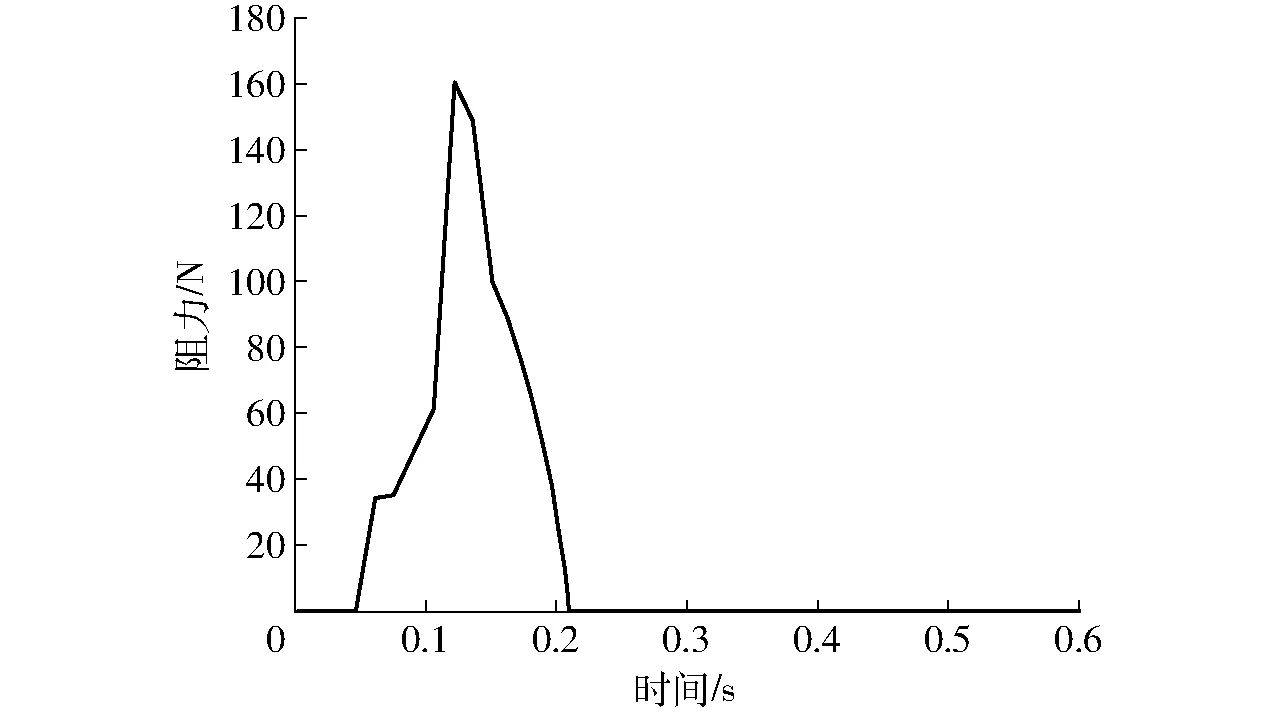
圖14 扎穴阻力變化曲線Fig.14 Change curve of resistance of acupoint
由圖14可知,阻力最大為162.4 N。0.05 s左右成穴器開始接觸土壤;在0.12 s成穴器頂點達到最低位置,成穴器在此時達到入土阻力最大值;在0.2 s之后的短時間內依然持續對土壤產生漸增的壓力;約0.22 s成穴器離開土壤,完全脫離地面后阻力為0。
為明確入土阻力,以成穴器研究為對象,采用位移傳感器和壓力傳感器等設備,試驗測量成穴器扎土深度與壓力關系,采集現場如圖15所示。

圖15 入土阻力采集現場圖Fig.15 Ground resistance collection site map
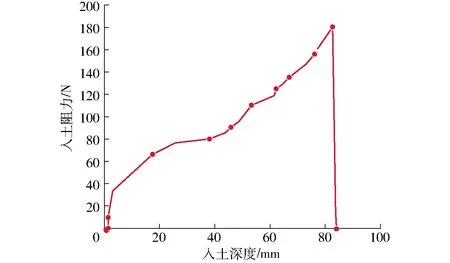
圖16 入土阻力與入土深度關系曲線Fig.16 Relationship curve between soil resistance and soil depth
研究表明[15],土壤在0~100 mm段可視為彈性變形階段,成穴器在土壤中入土阻力如圖16所示,由于成穴器頂端橫截面積小,末端橫截面積大,所受的土壤阻力線性增大。入土阻力曲線上升,當到達指定的扎穴深度時,受力最大,并到達峰值后受力極速下降。根據本次入土阻力試驗并結合成穴器入土動力學仿真可以判斷,入土阻力小于200 N,考慮計算分析誤差及穴施機在不同環境下保持穩定工作,液壓機構按照1.5倍入土阻力進行計算,根據公式(11)求解得出P=2.6 MPa,因此選定液壓系統的最大載荷為10 MPa,確保穴施排肥器能順利完成扎入工作。
3.2 排肥性能分析
為了探究穴施排肥器的排肥性能,應用EDEM軟件對滾輪式穴施排肥器工作部件與土壤接觸的肥料的運動過程進行模擬分析[16]。構建的幾何模型及顆粒工廠如圖17所示,涉及的參數[17-19]如表2所示。仿真時,選擇Hertz-Mindin(no slip) 接觸模型作為肥料顆粒與顆粒、顆粒與幾何體的接觸模型。在排肥器與肥箱結合處創建虛擬種子工廠,肥料顆粒生成模塊定義為Virtual,肥料顆粒在重力作用下落下。仿真時,添加上層土壤27 000粒,下層土壤110 000粒,運動時間為8 s(其中前0.2 s為落粒子時間,0.4 s時靜置粒子并生成bond鍵,1 s時滾輪式成穴器開始運動)。在穴施排肥器模型中添加肥料數量30 000粒,并分別設置作業速度1、1.5、2 m/s進行穴施肥作業。
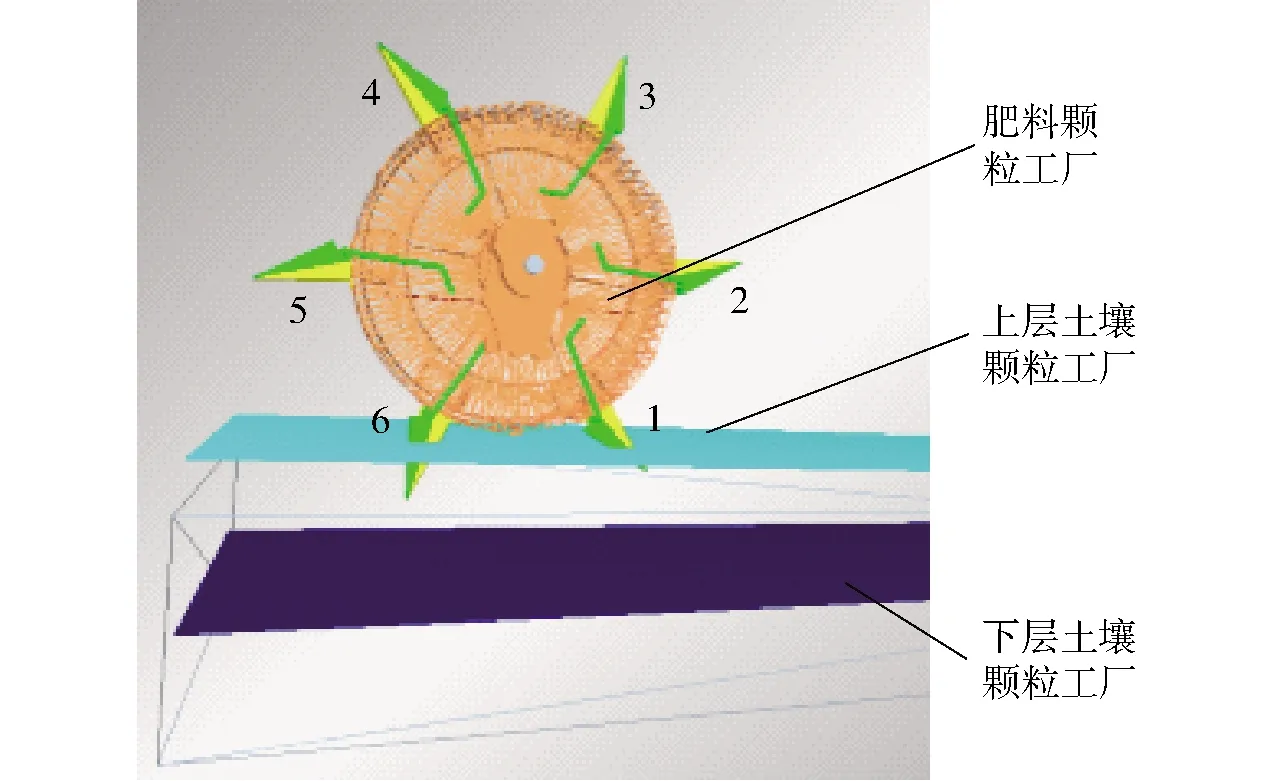
圖17 幾何模型及顆粒工廠Fig.17 Geometric model and particle factory
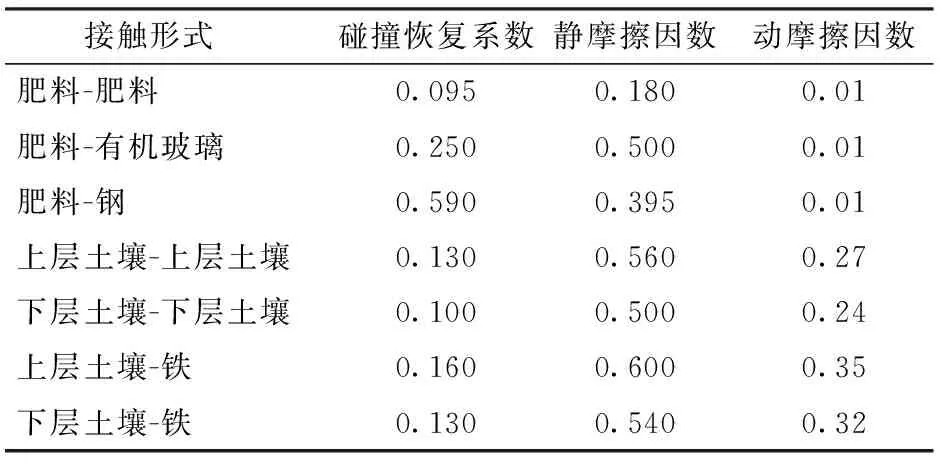
表2 仿真模型材料接觸參數Tab.2 Simulation model material contact parameters
不同作業速度下,成穴器旋轉端工作時間仿真結果如表3所示,其時間間隙均規律增長。由圖18可得:在不同作業速度下,成穴器運動的時間線性變化。直線的斜率是成穴器的運動頻率,直接反映穴施機作業效率。成穴器的運動頻率與整機工作速度相關,當作業速度為1.5 m/s時,其斜率接近作業速度1 m/s時的斜率,但作業速度2 m/s時,其斜率明顯小于1.5 m/s。

表3 旋轉端成穴器工作時間Tab.3 Working time of rotating end hole generator s

圖18 不同速度時成穴器運動時間Fig.18 Movement time of acupoint generator at different speeds
設成穴器完成一穴的施肥時間為T,圖19為一穴作業效果圖。為了研究不同作業速度下滾輪式穴施排肥器拋土特性,建立速度監測單元測量同一穴不同工況下粒子平均速度,如圖20所示,當作業速度為2 m/s時,粒子平均速度可達55 mm/s,且監測單元粒子平均速度隨作業速度的增大而增大。通過建立質量監測單元[20-21]測量扎穴口堆積土壤的質量,結果如圖21所示,根據測量結果,不同作業速度下,由于前兩穴穴施排肥器剛開始運動,拋出土壤質量未呈現規律,從第3穴到第6穴,拋出土壤質量呈現明顯的變化規律,速度越低,堆積的土壤質量越小,作業速度1 m/s時,拋土質量最低僅142 g。通過監測擾動土壤的平均速度及扎穴口土壤質量,可以判斷速度越小,對土壤擾動也越小。
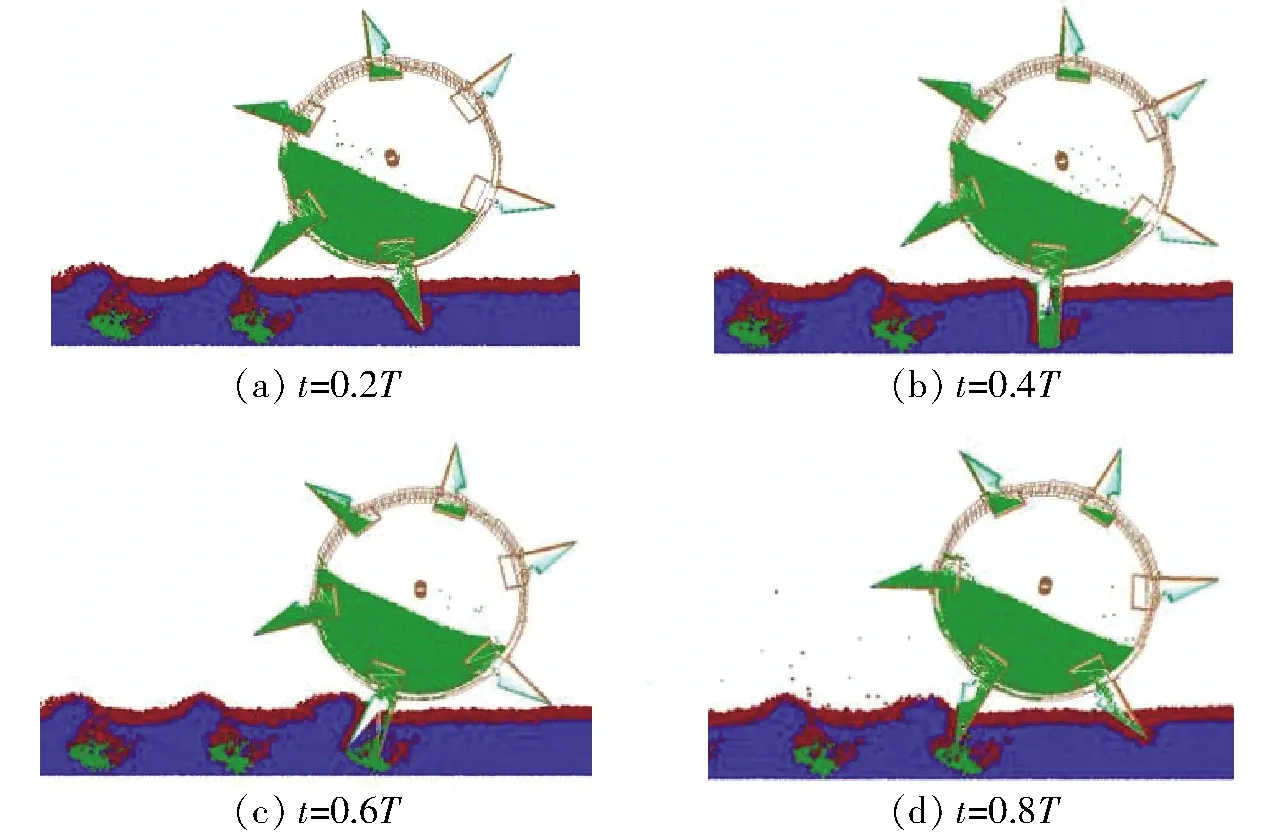
圖19 穴施作業效果圖Fig.19 Effect drawings of cave construction
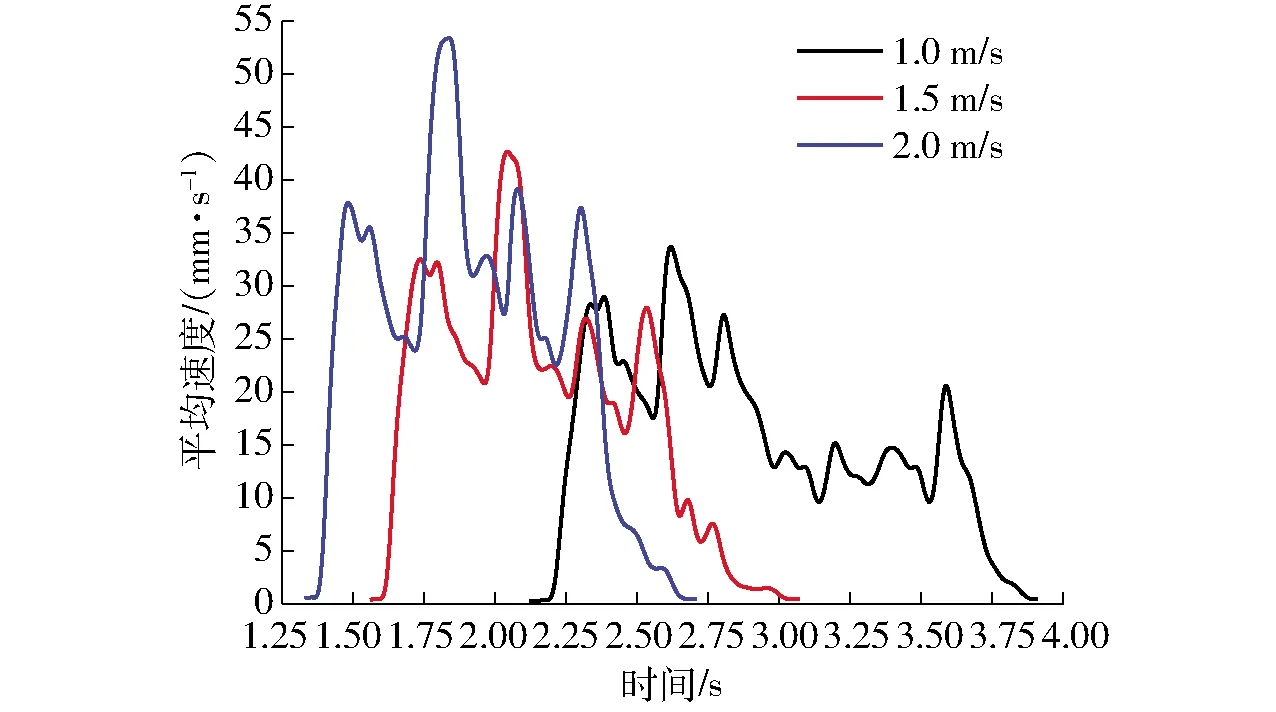
圖20 擾動土壤平均速度變化曲線Fig.20 Average velocity changing curves of disturbed soil
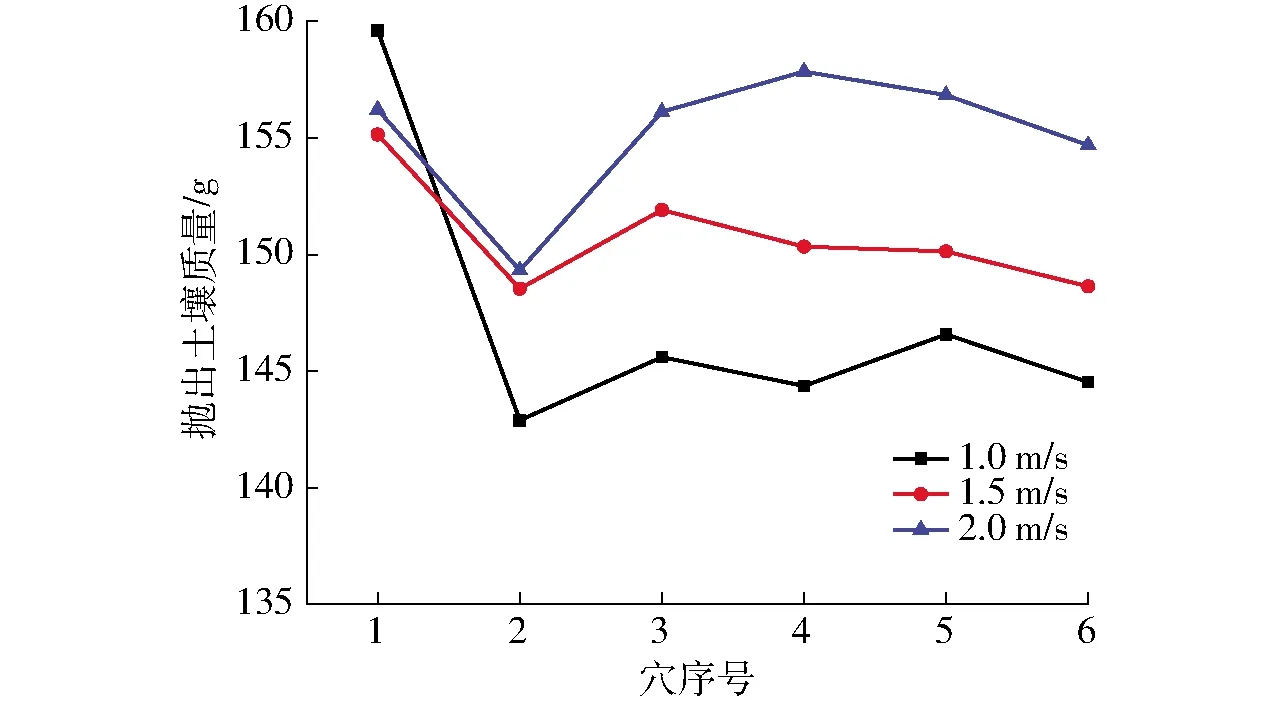
圖21 土壤質量變化曲線Fig.21 Soil qualitychanging curves
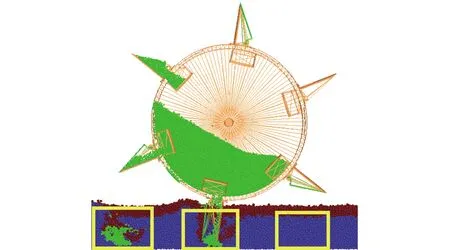
圖22 穴施量測定示意圖Fig.22 Cave application collection
圖22通過離散元后處理模塊建立質量監測單元測算出每穴的肥料質量,圖23為不同作業速度下的施肥量。不同作業速度下,前一穴獲得穴施肥量的時間與后一穴獲得穴施肥量時間重疊,這是由于建立的單元是相互獨立的個體,穴施排肥器工作時,滾動前進,不同的成穴器的工作是互不干擾的。通過3組數據對比可以看出,以1 m/s作業時穴施肥量穩定在13 g,最大穴施肥量為13.2 g,最小穴施量為12.6 g,變異系數為5.5%,符合設計要求;1.5 m/s時穴施肥量穩定在9 g,最大穴施肥量為9.2 g,最小穴施肥量為7.9 g,變異系數為1.6%,符合設計要求;2 m/s作業時穴施肥量最大值與最小值波動較大,且穴施肥量不滿足7~12 g,不符合設計要求。
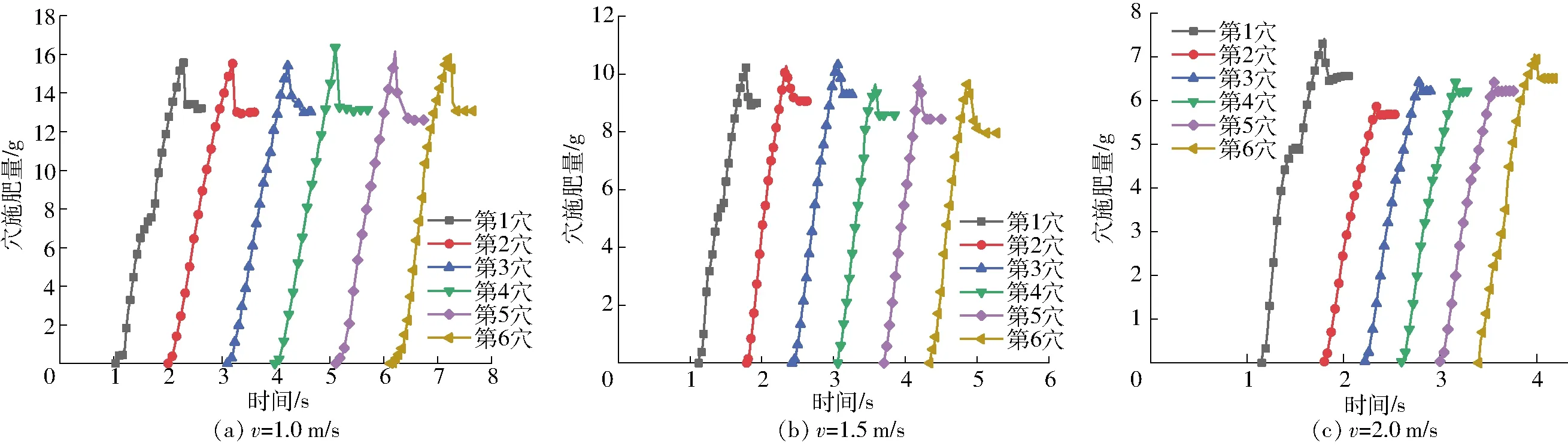
圖23 不同速度時穴施肥量變化曲線Fig.23 Variation curves of hole application rate at different speeds
4 田間試驗
2020年1月15日在安徽農業大學機電工程園和安徽農業大學農萃園分別開展排肥量試驗和田間模擬試驗。由于該季節沒有玉米,按照農藝要求,采用模擬玉米植株開展試驗,玉米行距600 mm,株距200 mm,每行20株玉米;試驗采用含硫加鉀控緩釋尿素。試驗時參照GB/T 20346.2—2006《施肥機械 試驗方法 第2部分:行間施肥機》、NY/T 1003—2006《施肥機械質量評價技術規范》方法開展。
4.1 排肥量試驗
試驗時,將施肥機處于靜止狀態,驅動輪置于驅動裝置上,用實際作業速度驅動施肥機,使施肥機按沒有打滑情況下的理論前進速度運轉,建立外廓尺寸為500 mm×500 mm、最小深度為150 mm的肥料收集器。試驗時,穴施機以1.5 m/s作業速度工作,稱取肥料收集器中肥料,每次試驗測定5次,持續時間為30 s,試驗進行5組,結果如表4所示。
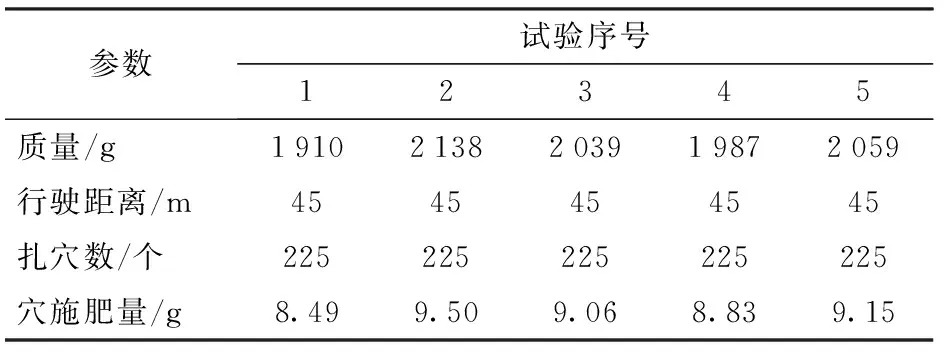
表4 排肥量試驗測定結果Tab.4 Test results of fertilizer discharge
根據試驗結果,平均穴施肥量為
(12)
式中Di——單次平均穴施肥量,g
穴施肥量偏差為
(13)
式中Dmax——單次平均穴施肥量最大值,g
Dmin——單次平均穴施肥量最小值,g
經計算ε=11.2%。
施肥均勻性變異系數為
(14)
式中S——標準差,g
經計算Z=4.17%。
根據上述試驗方法,在以1.5 m/s的作業速度工作時,平均穴施肥量9.01 g,平均值偏差為11.2%,施肥均勻性變異系數為4.17%。與離散元仿真最大穴施肥量相對誤差為2.1%,最小穴施肥量相對誤差為12.3%。參照農藝要求,試驗結果與離散元仿真結果相結合,在保證機具作業可靠性的前提下,為提高機具的作業效率,通過數值模擬仿真和試驗可以確定,作業速度為1.5 m/s時,滿足玉米中期追肥作業要求。
4.2 施肥深度合格率測定
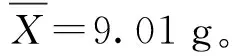
按照農藝要求,玉米施肥深度需達到8 cm,即當施肥深度大于等于8 cm時,施肥深度合格,反之即為不合格。因此施肥深度合格率可定義為取樣施肥深度合格株數與取樣玉米株數的百分比。在進行田間試驗時,需要對其施肥深度進行測定,用1.5 m/s的作業速度進行施肥深度合格率試驗,在圖24中B側往返作業3次,分別測其施肥深度,并記錄其實際合格施肥深度的株數,每次測試完成后,試驗人員需加土踩實扎穴施肥處。施肥深度合格率為
圖24 田間試驗照片Fig.24 Field trial photos
(15)
式中K——施肥深度合格率,%
KH——實際合格株數
KQ——取樣玉米株數,為120
根據上述試驗方法,以1.5 m/s的作業速度實際作業時,施肥深度合格率為92%,施肥深度變異系數為 6.57%。
5 結論
(1)設計了一種滾輪式穴施排肥器,闡述了其結構組成和工作原理,確定了滾輪式穴施排肥器關鍵結構參數。基于Abaqus建立了滾輪式穴施排肥器動力學模型,利用有限元法分析成穴器扎穴阻力,選定液壓系統最大載荷為10 MPa;利用離散元法分析不同速度下的拋土特性,分析得出,成穴器對土壤的擾動隨前進速度的增大而增大;通過穴施肥量分析,確定1.5 m/s作業速度符合要求,最大穴施肥量9.2 g,最小穴施肥量7.9 g,變異系數為1.6%。
(2)試驗結果表明:當滾輪式穴施排肥器以速度1.5 m/s作業時,平均穴施肥量9.01 g,穴施肥量偏差為11.2%,施肥均勻性變異系數為4.17%。與離散元仿真最大穴施量的相對誤差為2.1%,最小穴施量相對誤差為12.3%,誤差在13%以內。實際作業時,施肥深度合格率92%,施肥深度變異系數6.57%,滿足玉米中期追肥作業要求。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
故事大王(2016年7期)2016-09-22 17:30:08
新聞傳播(2015年10期)2015-07-18 11:05:40
