甜菜收獲機齒板式切頂裝置設計與試驗
2020-11-25 03:53:40王方艷張振宇
農業機械學報 2020年11期
王方艷 張振宇 張 欽 王 欣
(1.青島農業大學機電工程學院, 青島 266109; 2.青島農業大學建筑工程學院, 青島 266109)
0 引言
甜菜是我國重要的制糖原料。其纓葉繁茂、塊根較大,收獲期短、易受凍害。甜菜收獲環節費工、費時,通常采用先切除青頭后挖掘的甜菜機械化收獲方式[1-3]。切除含氮成分高的甜菜青頭,可延長甜菜的存儲時間及提高產糖量。甜菜青頭切厚過大,會使甜菜減產、塊根制糖有效物質流失;青頭切厚過小,則會增加制糖的有害成分。如何根據甜菜生長情況,有效清除纓葉和切除青頭是甜菜切頂機面臨的重要技術問題。
國外發達國家對甜菜切頂技術的研究較早,始于20世紀40年代,已形成了相對穩定的技術及裝備[4-6]。德國荷馬機械制造有限公司生產的變厚切頂裝置主要用于甜菜聯合收獲作業,該裝置適合甜菜高度差異不大的標準化收獲環境,部件售價約5萬元。美國艾美特公司生產的定厚切頂裝置主要用于甜菜的分段收獲作業,甜菜纓葉清理質量好,機具工作速度不高。日本生產的仿形輪式切頂裝置結構緊湊、仿形切頂效果較好,可一次完成殺纓、定厚切削,主要用于纓葉不繁茂、作業速度不高的收獲環境。在引進吸收國外先進技術的基礎上,我國研制了一系列甜菜切頂裝置,基本滿足甜菜低速作業及青頭切削要求,但其適應性及切頂質量還有待提升[7-11]。浙江理工大學研制的變厚切頂裝置通過齒輪與齒條的運動調整仿形輪與切刀的位置,其整體結構復雜,性能可靠性有待提高[12]。青島農業大學研制的定厚切頂裝置采用四桿仿形機構及仿形平板配合控制切刀與甜菜的相對位置,但切頂效果受甜菜青頭殘余纓葉的影響較大[13]。
現有的切頂裝置主要通過仿形器與切頂器的配合實現甜菜青頭的變厚或定厚切削[14-16]。平板式切頂裝置結構簡單、制造成本低,但要求甜菜青頭干凈無雜;輪式切頂裝置融合了碎纓和仿形功能,但結構復雜、易被纓葉及青頭堵塞,適于纓葉不繁茂的低速作業環境。本文根據不同甜菜品種及種植模式,以青島農業大學研制的4TSQ型甜菜切頂機為載體,設計齒板式甜菜切頂裝置,通過對甜菜切頂過程、工作原理及切頂狀態的分析,確定關鍵結構及性能參數,以提高切頂裝置的適應性及切頂質量。
1 結構與工作原理
齒板式甜菜切頂裝置主要由仿形器、切頂器、調壓機構等組成,結構如圖1所示。其中,連架桿、連桿構成平行四邊形結構,與齒板機構組成仿形器,可實現齒板機構與切頂器的同步運動。齒板機構和切刀構成切頂器,在仿形器的帶動下實時浮動,且相對位置穩定,配合完成定厚切削作業。齒板機構由多片齒板構成,有助于殘葉及青頭通過,便于切頂器沿甜菜輪廓滑行、控制切削厚度。限位板位于多片齒板的一側,控制齒板機構的離地高度及變動頻率,減少土壤對切刀刃口的磨損。調壓機構由扭簧、安裝板、調壓板構成,通過扭簧與調壓板孔連接位置的改變,實現彈簧力初始值的調整。隨著切頂器的隨地浮動,彈簧力在小范圍內波動,保障切頂器時刻接觸甜菜輪廓,控制切頂器對甜菜的推力,避免跨越或推倒甜菜。

圖1 切頂裝置結構示意圖Fig.1 Schematic of topping device1.機架 2.扭簧 3.安裝板 4.調壓板 5.連架桿 6.限位板 7.連桿 8.齒板 9.切刀
工作時,切頂裝置通過仿形器與機架相連,并隨機具勻速前行。切頂器的齒板接觸甜菜后,沿甜菜外輪廓滑向甜菜青頭頂端,牽連仿形器繞鉸接點轉動,并帶動切刀切割甜菜青頭。切頂完成后,切頂器在調壓機構及自身重力作用下及時回落,并接觸下一個甜菜的青頭輪廓。當遇到甜菜行缺苗、少苗或株距較大時,限位板輔助切頂裝置沿地面滑行,直到齒板機構接觸下一個甜菜。當甜菜受到齒板機構給予的碰撞力較大時,甜菜會被推斜或推倒,使得切頂裝置無法完成正常切頂作業。同時,為保證甜菜青頭切口平整,只有青頭切削完成后,才允許齒板機構接觸下一個甜菜輪廓。
2 甜菜受力分析
切頂裝置隨機具勻速前行,仿形器的連桿與連架桿運動順暢,切頂器的齒板不斷接觸甜菜并滑過青頭,齒板機構與切刀僅作平動且位置相對穩定,完成定厚切頂作業。在切頂過程中,齒板接觸甜菜的過程分為碰撞階段和碰撞后階段,且甜菜受到的水平推力小于其在土壤中的傾覆力,可保障切頂工作狀態穩定,并適應不同甜菜高度及株距的收獲環境。設甜菜頂為球體、球心為O、半徑為r;齒板與甜菜的接觸點為Q,Q為甜菜輪廓上的動點,QO與水平方向的夾角為γ;連架桿為均質桿,與AB的夾角為θ;連桿運動瞬時的傳動角為β;甜菜與齒板間的滑動摩擦角為φ。
2.1 碰撞階段的甜菜受力
齒板碰撞甜菜的瞬間,碰撞力P較大,且為斜碰;甜菜在碰撞力P作用下發生變形,并吸收部分能量;瞬間法向碰撞力Pn使得齒板速度逐漸減小,齒板的碰撞能量損耗持續到齒板與甜菜的法向速度相同,即在碰撞處齒板的法向速度為0;碰撞力P的水平分量為Pm。碰撞階段甜菜受力如圖2所示。

圖2 甜菜碰撞受力分析圖 Fig.2 Analysis diagram of beet collision force
由碰撞理論可知,齒板損失的碰撞能量W等于Pn經過位移s所作的功,且碰撞能量W滿足
(1)
式中m——切頂裝置質量,kg
vm——機具前進速度,m/s
η——甜菜吸收碰撞能量系數
Pmax——瞬間最大法向碰撞力
為避免切頂過程中甜菜的傾斜或翻倒,水平分力Pm應小于甜菜在土壤中的傾覆力[P],即
Pm=Pcos(γ-φ)=
(2)
由式(1)、(2)可知,甜菜碰撞力P、碰撞能量W與碰撞點Q的位置有關,且與切頂裝置的質量m及速度vm的平方成正比例。當齒板與甜菜碰撞點Q的位置較高(γ較大)時,碰撞力P、碰撞能量W較大,但甜菜受到的水平分力Pm較小,通常,甜菜不易被碰傷。甜菜的變形位移s由碰撞能量W決定,η只與甜菜的物理性質有關,[P]受多個因素的影響(如土壤類型及含水率、塊根形狀及生長狀態等),可通過試驗方式獲取[17-18]。由此可見,當切頂裝置結構及甜菜生長條件確定后,控制碰撞點Q的位置,降低切頂裝置的質量m及前進速度vm,可避免甜菜的碰撞損傷及傾倒,提高切頂效果及質量。
2.2 碰撞結束瞬時甜菜的受力
碰撞結束瞬時,齒板沿著甜菜輪廓滑向青頂,對甜菜的合力為F′,與碰撞力P方向相同,且Fm為甜菜受到的水平力,Fy為甜菜受到的垂直力。忽略甜菜頂的受力變形,采用達朗伯原理,對切頂裝置各構件進行力學分析。設連架桿AD、BC的長度為l1,彈簧力S到B點的距離為l2,各桿件及甜菜受力如圖3所示。

圖3 各桿件及甜菜受力分析圖Fig.3 Stress analysis diagrams of each rod and beet
對AD桿的A點取矩,∑MA=0,可得
(3)
式中M——慣性力矩
F1τ——桿AD切向慣性力
m1——連架稈質量
Fdτ——D點切向約束力
對BC桿的B點取矩,∑MB=0,得
(4)
式中F2τ——桿BC切向慣性力
Fcτ——C點切向約束力
由DCE桿的x′方向合力為零,∑Fx′=0,得
-Fncos(θ-γ)+Fdcos(90°-θ+γ)+m2gsinθ+
F′cτ+F′dτ+Feτ=0
(5)
其中
Fdτ=F′dτFcτ=F′cτFd=μFn
式中Fn——齒板受到的壓力
Fd——齒板受到的摩擦力
m2——連桿質量
F′cτ——桿DC中C點切向約束力
F′dτ——D點切向約束力
Fcτ——桿BC中C點切向約束力
α——桿AD與桿BC角加速度
Ja——桿AB中對B點轉動慣量
Jb——桿BC中對B點轉動慣量
由公式(3)~(5)計算得
(6)
式中μ——齒板與甜菜間滑動摩擦因數
由甜菜與齒板的受力平衡關系:F′n=Fn、F′d=Fd、F′=F,得甜菜受到的水平力Fm、垂直力Fy及連桿的傳動角β滿足
(7)
(8)
β=90°-θ+γ
(9)
式中F′——齒板對甜菜合力
由此可見,減小仿形器的連架桿質量m1、連桿質量m2、長度l1、彈簧力S、力臂l2,提高接觸點Q的初始位置(增大γ),可降低甜菜受到的合力F′和水平力Fm,有助于降低甜菜被推倒的可能性;當γ>φ時,甜菜的垂直力Fy向下,可保障齒板與甜菜接觸穩定;調節仿形器的位置角θ,使θ≈γ,可提高連桿的傳送性能,便于仿形器的隨地仿形運動。
綜合以上分析,當切頂裝置結構及作業條件確定后,降低切頂裝置的質量、前進速度、彈簧力,提高接觸點Q的位置,有助于降低甜菜受力及其被推動的可能性,保障切頂工作順暢。考慮甜菜青頭實際輪廓形狀、纓葉及雜質對碰撞的干擾,可設計合理的齒板曲線,控制齒板碰撞甜菜的位置及受力方向。當切頂裝置中各構件的質量及結構確定后,前進速度vm和彈簧力S為影響切頂作業效果的關鍵因素。由拖拉機正常田間工作及效率條件,確定前進速度為0.8~1.3 m/s(3~5 km/h);依據不推倒甜菜、順暢工作的要求,通過田間預試驗得出彈簧力S范圍為0~44 N。
3 切頂裝置關鍵參數確定
由切頂裝置的工作原理可知:切頂器不斷接觸甜菜,并推動仿形器起伏運動;仿形器組成的平行四桿機構,使得切頂器平動運動特性顯著;調壓機構及限位板共同控制切頂器的起浮空間,保障切頂位置相對穩定;齒板機構的結構影響甜菜受力及青頭通過性,與切刀配合工作完成甜菜連續切頂。當切頂裝置的安裝位置一定時,縮短仿形器的連架桿長度,可減小仿形桿的位置角θ,增強仿形器運動的靈敏性,但同樣增加了仿形器運動過程的動載荷。在不推動或不跨越甜菜的情況下,切刀切削甜菜青頭后,齒板機構接觸下一個甜菜輪廓,以保障甜菜青頭的正常切削及切口平整。相比而言,切頂器的結構參數較重要,直接影響到甜菜受力及切頂質量。切頂器結構如圖4所示。

圖4 切頂器結構簡圖Fig.4 Structural diagram of topping device
考慮機具通過性及工作空間,調節仿形器的位置高度,保障連架桿與連桿轉動順暢,并初定連架桿為300 mm,連桿為220 mm。為了降低纓葉及青頭外形對切頂位置準確性的干擾,齒板機構采用多個齒板等間距焊接而成,且確定齒板間距B3為40 mm[19-20],與甜菜青頭直徑相近,可保障殘余纓葉及青頭的順暢通過,以獲得較好的切頂效果。考慮甜菜田間種植及生長偏差,切頂裝置的作業幅寬B1滿足
B1=2(r+Δ)
(10)
式中Δ——偏移量,mm
為了避免仿形器頻繁起伏運動,設計限位板控制齒板的離地高度,控制齒板與甜菜接觸的位置,并保護齒板曲線、切刀刃口。通常,限位板高度h2與齒板高度h1滿足
h2=h+hg=h1+hg
(11)
式中h——最高甜菜與最低甜菜的高度差,mm
hg——青頂高度,mm
因甜菜青頭半徑rb為15~25 mm,甜菜頂半徑r為40~60 mm,種植偏移量Δ為30 mm,甜菜高度差h為60~80 mm,切厚hg為15~30 mm[21-22],則確定切頂裝置的作業幅寬B1為160 mm,限位板高度h2為100 mm,齒板高度h1為80 mm,此處h1與h相等。
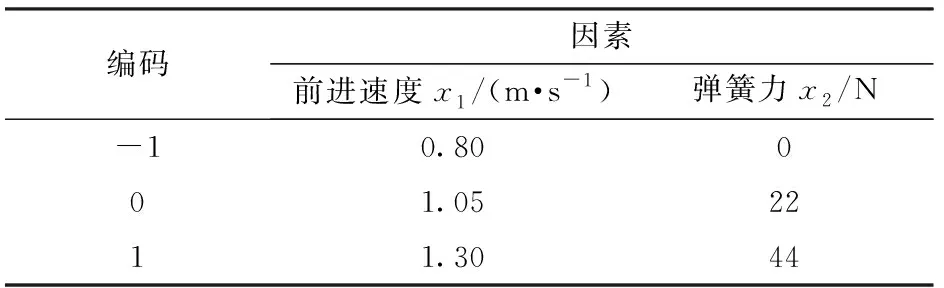
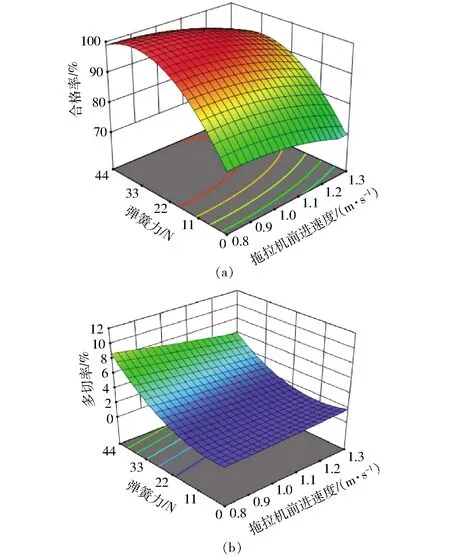
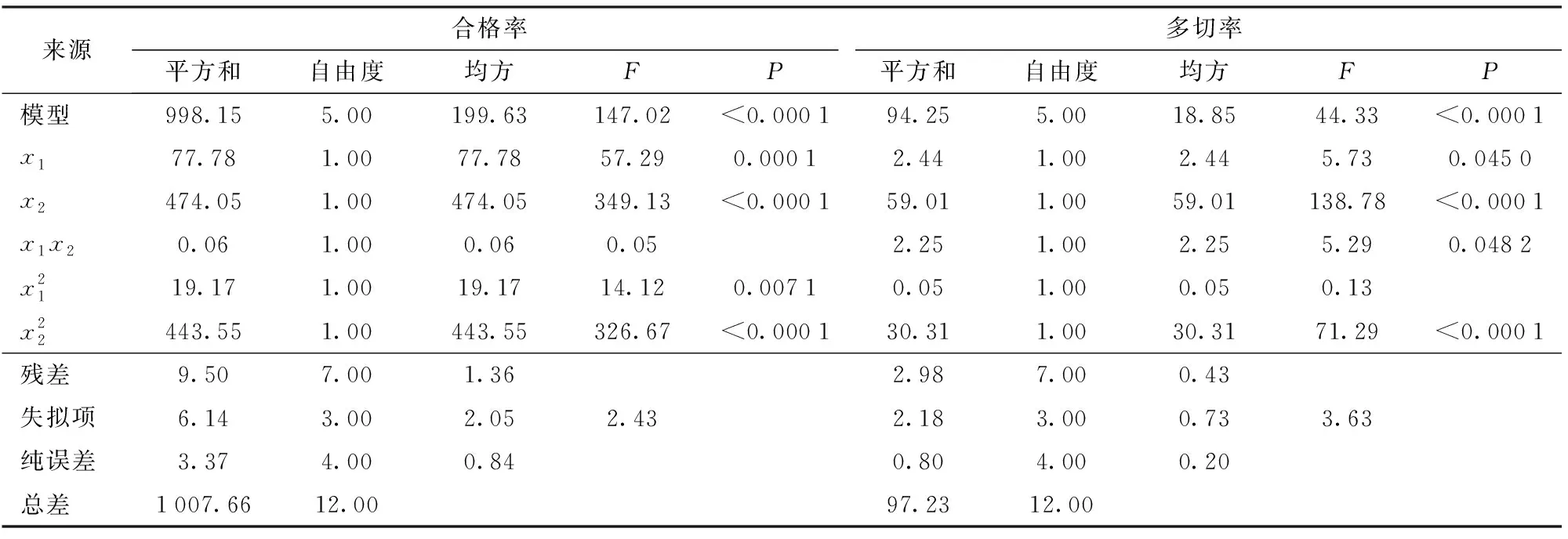
在切頂過程中,甜菜受到切刀刃口的滑切阻力和砍切阻力。當切刀的安裝角ε≥90°-φ時,甜菜與切刀接觸穩定且不滑動,直到青頭被切除。同時,切刀的安裝角ε決定著甜菜在切刀刃口滑切的長度,影響著切刀的切割功耗。依據斜切經驗公式R3l=const,可知安裝角ε越小,滑切長度l越長,切割力R越小,且越省力。為降低切削阻力,實現滑切效果,安裝角ε選用45°以適應不同的甜菜株距空間。為實現甜菜青頭切面平整、阻力小,選用上磨刃切刀,切刀寬度B1近似為青頭的直徑,超前量w 受甜菜株距、甜菜高度差、齒板接觸曲線及甜菜青頭輪廓的共同影響,齒板機構與甜菜輪廓的接觸點n隨機改變,運動狀態及規律未知。考慮齒板運動的沖擊力及穩定性,設齒板接觸曲線為五次多項式。齒板與甜菜的接觸點Q既是甜菜輪廓上的點,也是齒板曲線上的點。齒板曲線的坐標系如圖4所示。考慮齒板接觸甜菜過程較為復雜,齒板與切刀具有相同的運動特性,從運動學角度設定齒板運動中的3個特殊位置,以獲得較優的切頂效果。即,齒板接觸甜菜頂時,在y方向齒板速度為0,保障齒板與甜菜接觸、不分離;齒板接觸青頭切割處,即x=rb,y=h2時,可確保齒板接觸甜菜過程的連續及穩定;切頂結束瞬時,齒板與切刀具有相同的運動特性,在y方向齒板的位移、速度、加速度分別為0,可保障齒板運動平穩、甜菜切口平整。齒板曲線的方程及條件為 y=c0+c1x+c2x2+c3x3+c4x4+c5x5 (12) (13) 式中L——甜菜中心距 圖5 齒板接觸曲線Fig.5 Tooth plate contact curve 考慮田間缺苗及纓葉殘留等的影響,取rb=20 mm,hg=20 mm,h2=80 mm,L=300 mm,ε=45°,w=25 mm,B1=160 mm,r=60 mm,代入式(12)、(13)獲得齒板接觸曲線方程,曲線如圖5所示。 y=110-0.68x-6.5×10-4x3+6.7×10-6x4- (14) 2019年9月,在齊齊哈爾市依安縣甜菜種植田進行甜菜切頂試驗。依據GB/T 5262—2008《農業機械試驗條件測定方法的一般規定》,測定田間壤土含水率為14.2%,硬度為1 140 kPa,土壤容重為1.05 g/cm3;甜菜種植行距為650 mm,株距為280 mm,甜菜塊根地上高度為30~80 mm。 4TSQ-2型甜菜切頂機整機尺寸為1 680 mm×1 180 mm×890 mm,后方掛接齒板式甜菜切頂裝置,切頂收獲2行甜菜。齒板式切頂裝置如圖6所示。選擇36.7 kW拖拉機牽引試驗裝置,記錄不同參數組合下的試驗工況及試驗數據。參照NY/T 1412—2018《甜菜收獲機作業質量》,選20 m為一個作業小區,測定相應測量數據,觀察甜菜切頂質量及損傷情況,統計甜菜塊根總數G、切頂合格的塊根數G1、切頂多切的塊根數G2,計算甜菜的切頂合格率y1和多切率y2,計算式為 (15) (16) 綜合上述分析,忽略齒板與甜菜接觸位置變動的影響,機具前進速度vm及彈簧力S決定甜菜的碰撞損傷、碰撞力及傾覆力,影響切頂裝置的運動特性及甜菜切頂質量。 選擇前進速度x1、彈簧力x2為試驗因素,切頂合格率y1、多切率y2為指標,采用Design-Expert 8.0.6軟件進行設計試驗及數據處理,探尋較優的參數組合及影響規律[23-26],減少切頂器對甜菜青頭的滑傷和壓痕,避免切頂器跨越或推動甜菜,提高甜菜切頂裝置的通過性及切頂質量。前進速度為0.8~1.3 m/s,彈簧力S范圍為0~44 N,試驗因素及編碼如表1所示。 表1 試驗因素編碼Tab.1 Test factors and coding 采用CCD試驗設計方法,設計13個試驗點,試驗方案與結果如表2所示。 表2 試驗方案與結果Tab.2 Test scheme and results 借助Design-Expert軟件的CCD設計試驗方案,并進行數據處理,去除不顯著項,獲得各因素與評價指標的數學回歸模型 (17) (18) 由方差分析可知,回歸模型P<0.01和失擬不顯著,數學回歸模型與實際工作情況擬合精度高,可用于切頂裝置參數的優化分析。 圖7 因素交互作用對評價指標影響的響應曲面Fig.7 Response surfaces of influence of factor interaction on evaluation index 針對甜菜切頂裝置切頂作業存在的漏切、少切及塊根損傷等問題,以甜菜切頂合格率、多切率為指標,借助Design-Expert軟件的尋優功能,建立目標函數及參數約束。目標函數為 表3 方差分析Tab.3 Analysis of variance (19) 經軟件的指標尋優,確定較優參數組合:前進速度為1.04 m/s,彈簧力為22.96 N。圓整后,前進速度為1.0 m/s,彈簧力為23 N。通過田間試驗,在此參數組合下,測定齒板式切頂裝置的甜菜切頂合格率為99.6%,多切率為0.95%,符合甜菜切頂收獲指標要求;與4TSQ型甜菜切頂機的平板式切頂裝置相比,切頂合格率提高6個百分點,多切率降低1.15個百分點。作業中,齒板式切頂裝置運動靈活,對甜菜青頭及纓葉的適應性好,在調壓機構的控制下,可隨地浮動,保障切頂位置及厚度,工作狀態及效果如圖8所示。 圖8 切頂裝置工作狀態與效果Fig.8 Working status and effect of topping device (1)針對甜菜機械化切頂過程中存在的漏切、少切及塊根損傷等問題,設計了一種齒板式甜菜切頂裝置。通過切頂過程中甜菜的力學分析,明確了切頂裝置運動的隨機特性及其關鍵影響因素。在切頂裝置結構及作業條件確定后,設計合理的齒板曲線可控制齒板碰撞甜菜的位置及受力方向,控制前進速度和彈簧力有助于降低甜菜受力和被推動的可能性。 (2) 結合切頂裝置的工作原理及工作空間,確定了仿形器的連架桿為300 mm、連桿為220 mm;采用多齒板的齒板機構減小了纓葉及青頭對切頂位置的干擾,保證了切頂厚度及質量;采用限位板控制齒板的離地高度、齒板與甜菜接觸的位置,并保護齒板及切刀刃。采用齒板間距為40 mm、限位板高度為100 mm、齒板高度為80 mm、切刀寬為50 mm、超前量為25 mm、安裝角為45°,可保證甜菜青頭切面平整、阻力小。同時,以齒板接觸甜菜的特殊位置為運動條件,獲得齒板的輪廓曲線。 (3) 借助Design-Expert 軟件進行數據處理,得到各因素與評價指標的數學回歸模型。各因素對切頂合格率的影響順序由大到小依次為:彈簧力、彈簧力二次項、前進速度、前進速度二次項,彈簧力與前進速度的交互項影響不顯著。各因素對多切率的影響順序由大到小依次為:彈簧力、彈簧力二次項、前進速度、彈簧力與前進速度的交互項,前進速度二次項的影響不顯著。確定了較優參數組合:前進速度為1.0 m/s,彈簧力為23 N。進行了田間試驗,在較優參數組合下測定甜菜切頂合格率為99.6%、多切率為0.95%,符合甜菜切頂收獲指標要求,并優于改進前的平板式切頂裝置。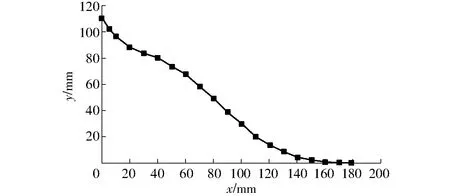
1.6×10-9x54 試驗
4.1 試驗條件及方法
4.2 試驗設計
4.3 試驗方案及結果





4.4 試驗優化與驗證


5 結論
