基于超聲振動的土壤切削挖掘裝置設計與試驗
2020-11-25 03:53:20王東偉王家勝
農業機械學報 2020年11期
關鍵詞:振動
王東偉 王家勝
(青島農業大學機電工程學院, 青島 266109)
0 引言
土壤耕作、深松以及根莖類作物挖掘收獲等作業是農業生產中阻力最大、耗能最高的環節。節能降阻一直是該領域的研究重點,其中振動方式是一種降低土壤作業部件工作阻力的有效途徑。所施加的振動頻率通常為小于30 Hz的低頻振動,文獻[1-4]研究表明,通過外部動力按照一定振幅和頻率驅動觸土部件振動,其工作阻力能夠得到有效降低,但總耗能一般要比非振動狀態下高[5]。振動能量的傳遞會使連接部件甚至整機產生振動、沖擊和噪聲,并導致機器壽命下降。超聲波振動頻率超過20 kHz,超聲高頻振動輔助切削技術在金屬加工領域,特別是硬脆合金材料的車、鉆、磨等方面的應用研究較多,相比傳統切削,超聲振動輔助切削的工作阻力顯著降低,而且切削面質量更高[6-8]。在食品加工領域,超聲振動技術被應用于干酪等食品切割上,表現出摩擦力小、切面光滑干凈、表面損傷小等優點[9-12]。近年來,超聲振動技術逐漸應用于更多材料的輔助切削上,并表現了突出的優越性。文獻[13-14]設計了Nomex蜂窩材料和氣凝膠材料超聲輔助切割裝置,試驗表明,切削阻力大幅降低;文獻[15]對柳枝稷和芒草莖稈超聲振動輔助切割進行了研究,切削能量最大可節省80%;文獻[16]對云杉和山毛櫸兩種木材的超聲輔助切割試驗表明,其工作阻力比傳統切割降低50%。
本文提出基于超聲振動的土壤切削挖掘裝置結構方案,以耦合諧振為目標,設計并集成超聲換能器、變幅桿、鏟刀等關鍵部件結構參數,搭建超聲振動土壤切削挖掘阻力試驗測試平臺,通過阻力對比試驗驗證該裝置的降阻特性,為研發超聲振動土壤作業機具提供理論依據和參考。
1 結構方案與振動降阻理論分析
1.1 結構方案
圖1為實現超聲波高頻振動土壤切削挖掘裝置的結構示意圖。該裝置主要由超聲波發生器、換能器、變幅桿、法蘭盤以及土壤切挖部件等組成。工作過程中,首先由超聲波發生器產生高頻振動電信號,再經換能器將超聲電信號轉變為高頻機械振動波,變幅桿兩端分別連接換能器輸出端和土壤切挖部件的柄端,其作用是將超聲機械波進一步放大后傳遞給觸土部件,激勵觸土鏟刀的高頻縱向振動,以降低土壤切削挖掘阻力。法蘭盤設置在變幅桿上零位移節點位置,與外驅動部件連接,帶動超聲振動土壤切削裝置前進作業。
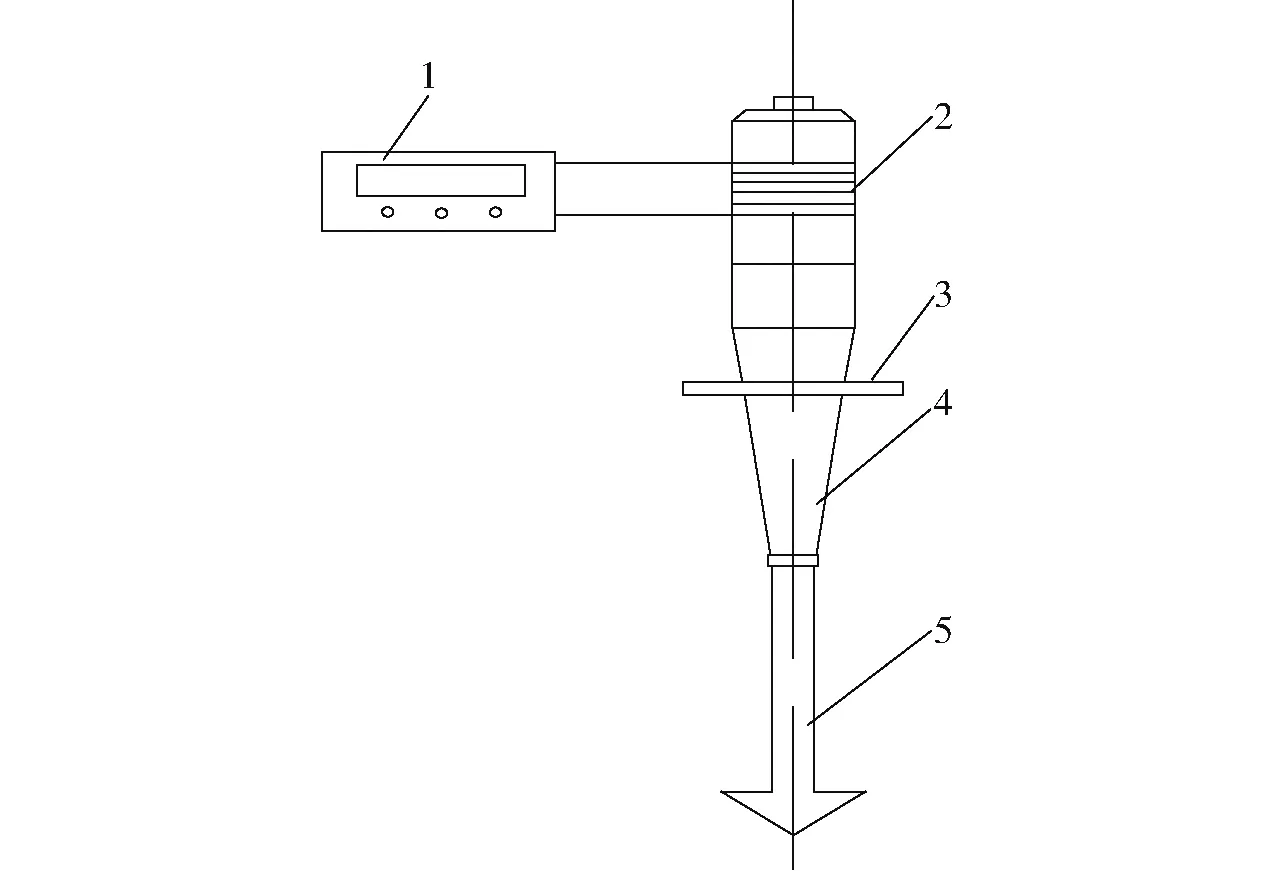
圖1 超聲振動土壤切削挖掘裝置結構示意圖Fig.1 Structural sketch of ultrasonic vibration soil cutting and digging device1.超聲波發生器 2.換能器 3.法蘭盤 4.變幅桿 5.土壤切挖部件
1.2 振動降阻理論分析
圖2為超聲振動土壤切削原理圖。振動方向沿鏟刀的縱向方向,則鏟尖在水平方向的位移為觸土部件的振動位移與前進位移之和,即
xr=vt+Asin(ωt)cosθ
(1)
式中xr——鏟尖在水平方向的綜合位移,m
v——觸土部件前進速度,m/s
t——時間,sθ——入土角,(°)
A——振幅,mm
ω——振動角頻率,rad/s
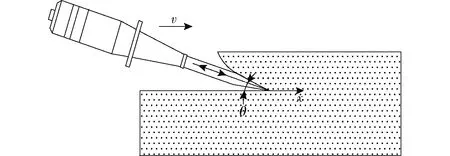
圖2 超聲振動土壤切削原理圖Fig.2 Schematic of ultrasonic vibration soil cutting
對式(1)求導可得鏟尖在水平方向上的合速度為
vr=v+Aωcos(ωt)cosθ
(2)
式中vr——鏟尖在水平方向上的合速度,m/s
式(2)中動態速度項Aωcos(ωt)cosθ取值區間為(-Aωcosθ,Aωcosθ),如果-Aωcosθ<-v,則vr<0,此時鏟的觸土面與前端硬土處于分離狀態,前進方向上沒有互作力。入土角θ確定,振幅與振動頻率的乘積Aω將決定作業過程中是否滿足鏟面與土壤分離的條件以及鏟、土分離時間。超聲波的高振動頻率會有利于增加土壤挖掘過程中鏟面與土壤的分離機會,但由超聲波發生器與換能器產生的超聲機械波振幅較小,通常只有4~10 μm,還需要設計參數匹配的變幅桿,實現裝置的耦合諧振,利用其聚能作用將進一步放大振幅,從而增大振動速度,達到降低阻力的目的。
2 關鍵部件及參數設計
2.1 超聲頻率確定
為實現裝置的耦合諧振,超聲激振頻率是決定換能器和變幅桿結構和尺寸的基礎參數。特定頻率超聲波信號由他激式振蕩電路超聲波發生器產生,當前工業中常用的超聲波頻段基本在20~100 kHz之間,但頻率越高,與之配套的換能器產生的熱量越大,不利于長時間工作,因此該方案選定20 kHz作為超聲振動頻率,換能器、變幅桿及鏟刀結構將基于該頻率進行設計。
2.2 換能器參數設計
2.2.1夾心式換能器結構
超聲波換能器是利用逆壓電效應原理將超聲波發生器傳遞的電能轉換為機械能。夾心式壓電陶瓷換能器結構如圖3所示。
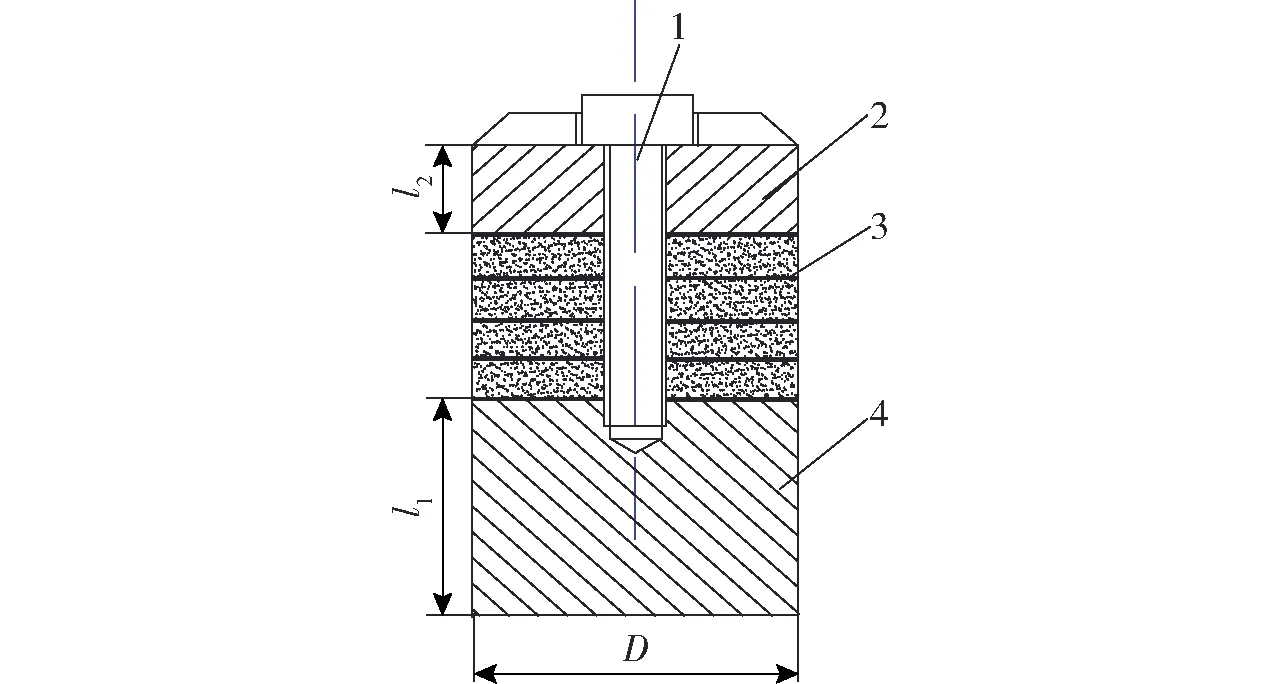
圖3 夾心式壓電陶瓷換能器結構圖Fig.3 Structure of sandwich piezoelectric ceramic transducer1.預應力螺栓 2.后蓋板 3.壓電陶瓷片 4.前蓋板
換能器采用偶數片環形壓電陶瓷片串聯,陶瓷片間裝有金屬電極,再由前、后蓋板經預應力螺栓將其連接為一體,超聲波發生器產生的高頻電信號接入施加于金屬電極片所形成的高頻電場與壓電陶瓷片作用后,轉換為高頻機械振動并傳遞出去即為超聲波。
2.2.2壓電陶瓷片參數
該系統選用4片環形PZT-8型壓電陶瓷片,每片厚度5 mm。為了避免換能器諧振頻率與壓電陶瓷徑向振動相耦合而導致縱向振動效率降低,壓電陶瓷片直徑應不大于對應頻率超聲波在陶瓷中1/4波長[17],即
(3)
式中D——陶瓷片外徑,mm
ce——壓電陶瓷等效聲速,m/s
f——諧振頻率,Hz
根據壓電陶瓷楊氏模量和密度可查得ce=3 183 m/s,取f=20 kHz,代入式(3)得D≤40.5 mm,取D=40 mm。
2.2.3前、后蓋板參數
換能器前蓋板主要功能是將產生的超聲振動能量高效縱向輻射出去,選用機械損耗小的高強度硬鋁材料2A12加工而成。為了實現換能器單向無障礙輻射,后蓋板材料選用符合該要求的45號鋼。前、后蓋板均采用等截面圓柱狀,截面直徑與陶瓷片外徑相等,均為40 mm。為實現系統諧振,前后蓋板長度可利用頻率方程計算確定[18]
(4)
(5)
式中ρ——壓電陶瓷密度,kg/m3
ρ1、ρ2——前、后蓋板材料密度,kg/m3
l1、l2——前、后蓋板長度,mm
c1、c2——前、后蓋板聲速,m/s
lc1、lc2——位移節面兩側1/4波長振子中陶瓷片長度,mm
S1、S2——前、后蓋板截面積,mm2
S0——壓電陶瓷片截面積,mm2
由f=20 kHz,可得ω=1.256×105rad/s;根據前、后蓋板材料可知其密度分別為ρ1=2 700 kg/m3,ρ2=7 800 kg/m3,對應的聲速為c1=5 092 m/s,c2=5 189 m/s;根據壓電陶瓷片的厚度可知lc1=5 mm,lc2=15 mm;因壓電陶瓷片與前、后蓋板截面積均相等,由D=40 mm,可得S0=S1=S2=1.96×10-3m2;將以上參數代入式(4)、(5)可求得前、后蓋板長度分別為l1=58 mm,l2=30 mm。
2.3 變幅桿參數設計
2.3.1變幅桿振動理論模型
變幅桿的聚能作用體現在將微小振幅超聲振動進一步放大并傳遞給負載部件。在忽略傳播損耗的前提下,相同時間通過變幅桿截面的能量是不變的,所以變幅桿是通過減小截面積來增大能量密度。能量密度與振幅的關系為[19]
ρE=ρhchω2A2
(6)
ρh——變幅桿密度,kg/m3
ch——變幅桿傳播聲速,m/s
即能量密度與振幅的平方成正比,因此,超聲波振幅也是隨變幅桿的截面積減小而增大。為了獲得較大振幅,應使變幅桿的固有頻率接近或等于激振頻率,使之處于共振狀態。變幅桿固有頻率由其材料、質量及結構尺寸決定。
在超聲簡諧振動下,變幅桿縱向振動方程為[20]
(7)
式中ξ——變幅桿質點振動位移函數
S——沿變幅桿縱向坐標截面積函數
x——變幅桿軸向坐標,mm
kh——變幅桿聲波數,mm-1
Let Eqs. (6) – (5), finally we get the output resistance:
目前常用的變幅桿結構類型可分為圓錐型、階梯型、指數型等。針對土壤切削的特點,選抗彎強度好、穩定性高且易加工的圓錐形變幅桿。變幅桿選材應滿足傳遞超聲振動能量損耗小、疲勞強度高、聲阻抗小及易加工等要求。鈦合金可很好地滿足以上要求,但價格太高,綜合考慮,選用45號鋼作為變幅桿材料。
圓錐形變幅桿如圖4所示,振動由連接換能器的大頭傳向連接觸土部件的小頭,根據錐體幾何關系,得其截面積及截面直徑分別為
Sh=Sb(1-αx)2
(8)
Dh=D1(1-αx)
(9)
其中
式中Dh——變幅桿截面直徑,mm
Sh——變幅桿截面積,mm2
Sb——變幅桿大頭截面積,mm2
D1——變幅桿大頭截面直徑,mm
D2——變幅桿小頭截面直徑,mm
α——比例系數,mm-1
l——變幅桿長度,mm
圖4 圓錐形變幅桿振動示意圖Fig.4 Vibration diagram of conical horn
由圓錐形變幅桿截面積函數式(8)、(9),求得滿足式(7)的解為
(10)
式中A1、B1——常數項
則變幅桿質點應變為
(11)
2.3.2變幅桿諧振長度設計
(12)
(13)
將已知條件數據代入式(13),通過數值計算可得到不同變幅桿大、小頭直徑比與諧振長度的關系曲線如圖5所示。由圖5可以看出,隨變幅桿兩端直徑比的增大,變幅桿諧振長度呈非線性增大。
圖5 變幅桿直徑比與諧振長度的關系曲線Fig.5 Relation curve between diameter ratio of horn and resonance length
變幅桿大頭直徑與換能器前蓋板直徑相同,即D1=40 mm,取小頭直徑D2=20 mm,則N=2,則由式(13)計算得變幅桿諧振長度l=137 mm。
2.3.3位移節點確定
變幅桿位移節點是指振幅為0的點。該點所在的截面是對變幅桿也是對整個部件的夾持固定位
置,有效避免振動能量的外泄。
(14)
式中ξ1——變幅桿輸入端最大振幅,mm
基于式(14),由位移節點條件:x=x0,ξ=0,可得
(15)
式中x0——變幅桿位移節點坐標, mm
將kh=24 mm-1,α=3.65 mm-1代入式(15),求解得x0=54 mm。
3 超聲變幅桿模態分析與諧響應分析
3.1 變幅桿有限元模型
變幅桿諧振的條件取決于變幅桿的材料及結構尺寸,為檢查和驗證理論設計的正確性,基于有限元仿真軟件ANSYS Workbench對錐形變幅桿進行模態分析和諧響應分析。
利用SolidWorks按照設計尺寸對變幅桿幾何建模后導入有限元軟件ANSYS Workbench,材料取45號鋼。根據位移節點位置的理論計算值,在距變幅桿大端面54 mm處固定一法蘭圓盤作為切削裝置與外部驅動機構的連接點,此處縱向振幅為0,法蘭盤面即為動力仿真的固定約束面。網格單元類型采用20個節點的六面體單元(solid186)。有限元模型如圖6所示。
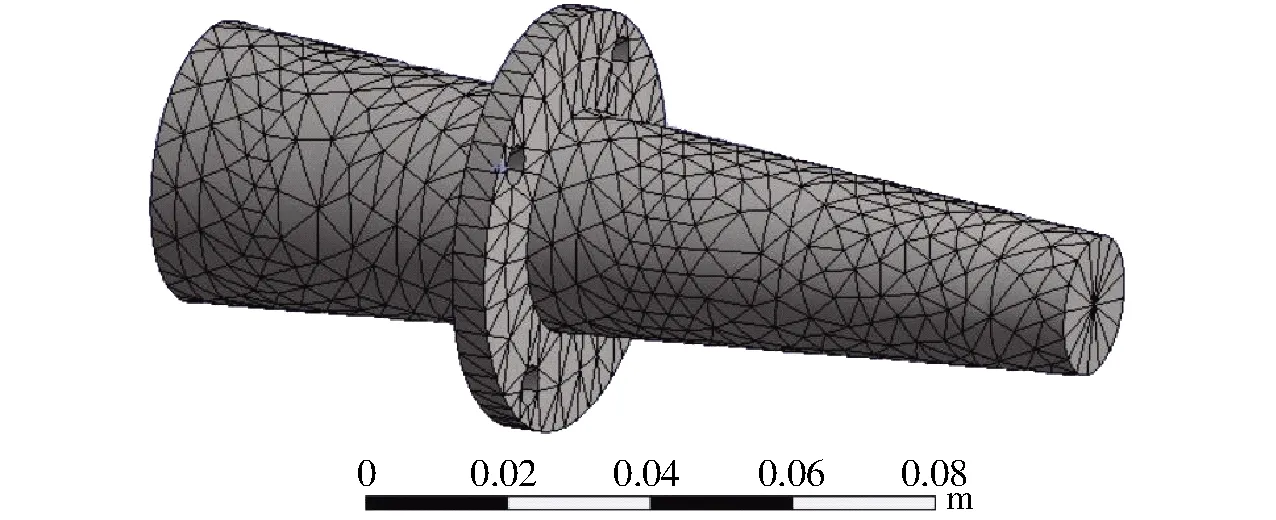
圖6 錐形變幅桿有限元模型Fig.6 Finite element model of conical horn
3.2 模態分析
模態分析的拓展階數為11階,最大振動頻率可達23.016 kHz,根據分析結果發現,前11階振動模態振動方向包括彎曲、扭轉、伸縮等不同類型,其中第8、9、10、11階模態分析圖如圖7所示。根據仿真結果,第9階和第10階模態為與超聲激振方向一致的軸向伸縮振動,振動頻率分別為16.267、20.096 kHz。2個模態的輸入與響應相位差分別為0°和180°,即第9階模態下,變幅桿大端面振動與小端面振動方向同步,而第10階模態下,變幅桿大端面振動與小端面振動方向相反。第10階模態振動頻率與設計頻率的誤差小于1%,與理論值吻合較好,滿足變幅桿的設計要求。
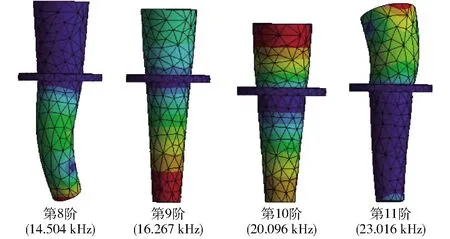
圖7 第8、9、10、11階模態分析圖Fig.7 8th~11th order modal analysis diagrams
3.3 諧響應分析
諧響應分析搜尋頻率設置為19~21 kHz,軸向激振力施加在變幅桿大端面,從變幅桿小端面測量響應振幅,響應曲線如圖8所示。
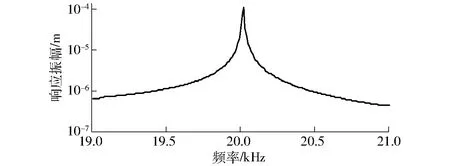
圖8 圓錐形變幅桿諧響應曲線Fig.8 Harmonic response curve of conical horn
由圖8可知,變幅桿輸出端響應振幅在頻率為20 kHz附近達到最大值,因此,超聲變幅桿能夠較好地實現在頻率為20 kHz超聲下諧振,對振動能量高效傳遞。仿真結果驗證了超聲變幅桿理論設計參數的正確性。
4 試驗驗證
4.1 試驗系統構建
超聲振動土壤切削挖掘阻力試驗測試系統如圖9所示。該系統主要包括超聲振動切削裝置、土槽、伺服電機、力學傳感器、數據采集卡、計算機以及軟件測控程序等。
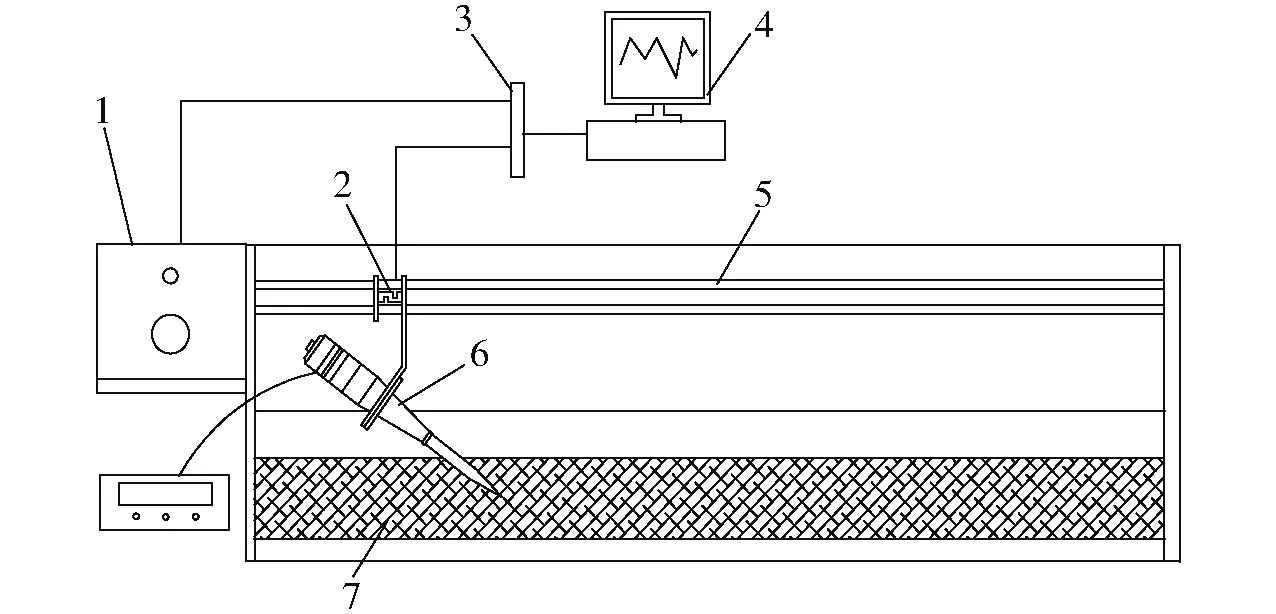
圖9 超聲振動土壤切削挖掘阻力試驗測試系統原理圖Fig.9 Test system for soil cutting resistance with ultrasonic vibration1.伺服電機 2.力學傳感器 3.數據采集卡 4.計算機 5.運動導軌 6.超聲振動切削裝置 7.土槽
將超聲振動土壤切削挖掘裝置安裝在試驗臺的運動導軌上,切削裝置可在伺服電機驅動下沿導軌直線往復運動。試驗臺底部安置土槽,則切削裝置在前進過程中實現對土槽內土壤的切削挖掘。傳感器將所測得數據經數據采集卡傳入計算機測控程序,測控程序除了能夠采集、顯示和存儲試驗數據外,還可對試驗臺伺服驅動裝置進行控制,實現切削裝置運動狀態的實時控制及運動與電流參數的采集等功能。按照設計方案試制的試驗臺如圖10所示。
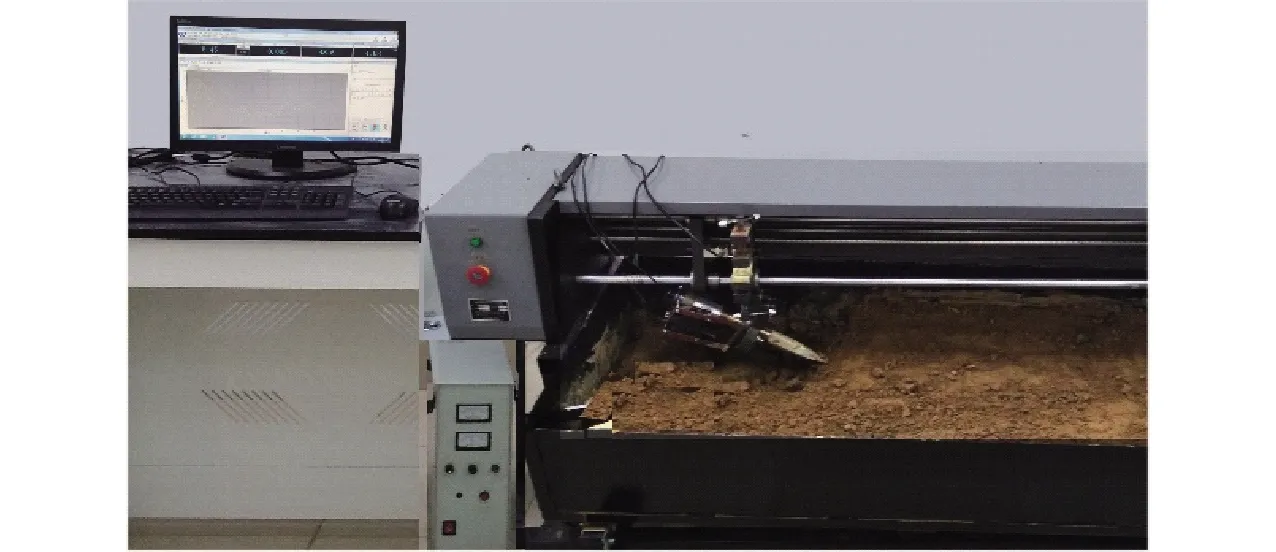
圖10 超聲振動土壤切削挖掘試驗臺裝置Fig.10 Test bed for soil cutting with ultrasonic vibration
4.2 試驗方法
在相同土壤條件下進行有、無超聲振動的土壤切削挖掘阻力和耗能對比試驗。阻力可直接由測定數據統計得到。耗能對比試驗中,土壤挖掘耗能計算式為
EⅠ=Rvt
(16)
式中EⅠ——克服切削挖掘阻力耗能,J
R——切削挖掘阻力,N
振動土壤挖掘耗能除了克服切削挖掘阻力耗能外,還包括振動激勵耗能,可利用超聲波發生器所耗電能來代替,其計算式為
EⅡ=UIt
(17)
式中EⅡ——振動激勵耗能,J
U——工作電壓,V
I——工作期間平均電流,A
則振動土壤挖掘總耗能為克服阻力耗能與振動激勵耗能之和。與無振動耗能對比可用耗能比來表示,計算式為
(18)
式中e——耗能比
Ev——超聲振動下切削挖掘總耗能,J
Eo——無振動切削挖掘耗能,J
試驗用土壤類型為壤土,土壤硬度分別設為1.5、2.5、3.5 MPa,土壤含水率在20%~48%間取值,挖掘鏟入土角為20°、挖掘深度為8 cm。加載速度為3 000 mm/min。試驗前對土槽內土壤進行整備,整備工藝為翻松碎土-整平-灑水-壓實4道工序,整備后的土壤滿足預設的土壤硬度和濕度要求;在相同土壤條件和工作參數下通過開、閉超聲波發生器分別進行有、無超聲振動土壤切削挖掘阻力和耗能對比試驗,采集并記錄試驗數據,每組試驗重復3次。
4.3 試驗結果與分析
圖11顯示了在土壤硬度為2.5 MPa、土壤含水率為26%時,有、無超聲振動土壤切削挖掘阻力時間歷程曲線。2條曲線對比顯示,加載超聲振動下,土壤切削挖掘阻力明顯降低。對重復試驗數據進行統計計算得無超聲振動土壤平均切削挖掘阻力為142 N,超聲振動土壤平均切削挖掘阻力為84 N,降阻率達40.7%。
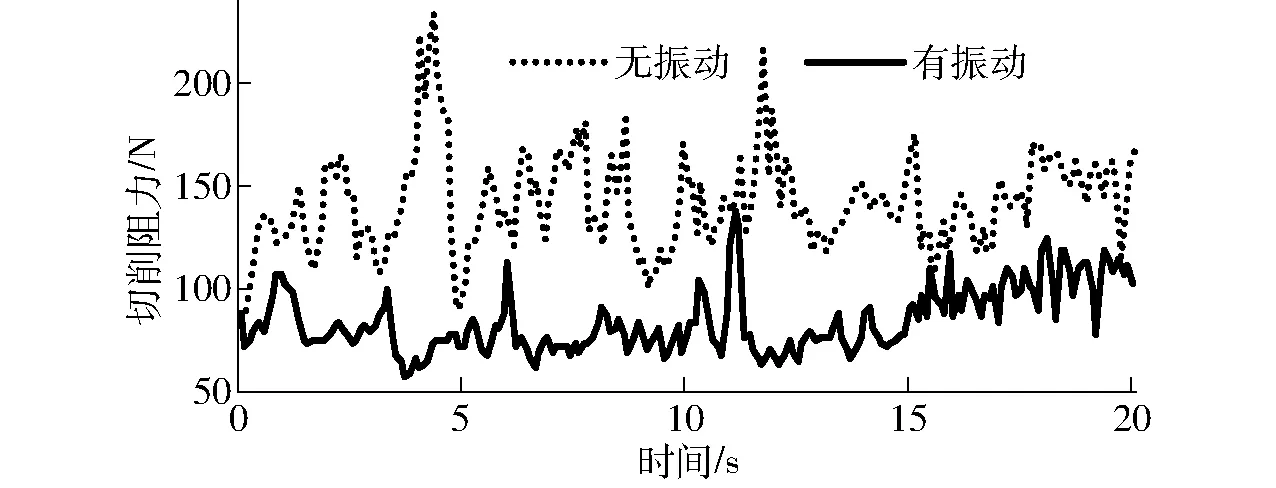
圖11 土壤切削挖掘阻力時間歷程曲線Fig.11 Curves of soil cutting resistance with time
圖12是在土壤濕度26%時,3種不同土壤硬度對應超聲波振動挖掘鏟和無振動剛性鏟土壤切削挖掘阻力的對比。在土壤硬度為1.5 MPa時,超聲波振動鏟降阻率為35.1%,而當土壤硬度增大到2.5 MPa和3.5 MPa時,對應的降阻率也分別增加到40.7%和44.3%。由此可見,土壤硬度越大,超聲波振動挖掘鏟的降阻效果越好。
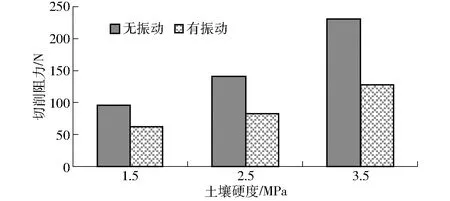
圖12 3種土壤硬度下有無振動土壤切削挖掘阻力比較Fig.12 Comparison of soil cutting resistance with and without vibration under three soil hardness
圖13顯示了土壤含水率從20%到48%區間,有、無振動土壤切削挖掘阻力的變化曲線。由圖中可以看出,不論有無振動,土壤切削挖掘阻力都隨著土壤含水率的增加先迅速降低,然后又緩慢回升。對比2條變化曲線發現,除了高頻振動作用下的阻力明顯降低外,還可看出在低含水率(20%)和高含水率(48%)的曲線兩端,其阻力的降低幅度稍大于中間段。
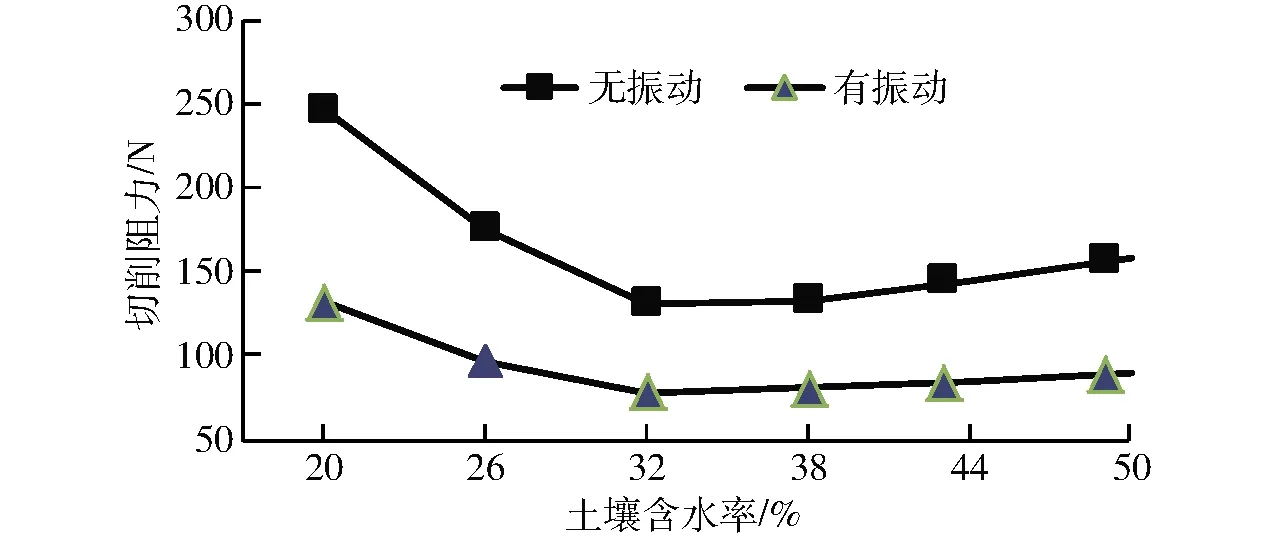
圖13 不同土壤含水率下土壤切削挖掘阻力曲線Fig.13 Soil cutting resistance curves under different soil moistures
由于超聲振動激勵下工作阻力有效降低,觸土部件克服阻力耗能也會得到有效降低。但激勵觸土部件振動需要超聲波發生器消耗額外能量。根據試驗統計,超聲波發生器工作電壓為220 V,在土壤硬度分別為1.5、2.5、3.5 MPa下對應平均工作電流分別為8、12、26 mA,可見土壤硬度越大,振動耗能越大。如考慮其綜合耗能,分別利用式(16)~(18)統計計算出土壤硬度為1.5、2.5、3.5 MPa下所對應的有無振動土壤挖掘耗能比為0.98、0.93和1.04。計算結果表明,在某些土壤硬度條件下振動挖掘耗能得到了一定降低,但降低效果不明顯,某些狀態還略高于無振動挖掘耗能。盡管如此,由于超聲振動輔助土壤挖掘能夠顯著降低工作阻力,這就降低了觸土部件對動力驅動裝備的功率要求;同時,低功率動力裝備因自身質量減輕還會減小對農田土壤的壓實影響。
試驗結果表明,在不同典型土壤硬度和土壤含水率條件下,影響降阻特性的激振頻率、換能器與變幅桿關鍵結構參數能夠實現有效匹配和裝置的耦合諧振,土壤切削挖掘阻力均能得到有效降低,從而驗證了超聲波振動挖掘裝置設計方案的可行性和設計參數的正確性。
5 結論
(1)設計了超聲振動土壤切削挖掘裝置。選定20 kHz作為超聲激振頻率,基于耦合諧振效應的目標,分析、設計了夾心式換能器和圓錐形變幅桿等關鍵部件的結構參數。建立了變幅桿有限元模型,利用仿真方法對其進行模態分析,仿真結果顯示,變幅桿軸線伸縮固有頻率接近20 kHz,與設計值吻合。
(2)搭建了超聲振動土壤切削挖掘阻力試驗測試平臺,進行了有、無超聲波振動土壤切削挖掘阻力土槽對比試驗。結果表明:相比無振動剛性挖掘鏟,超聲波振動挖掘鏟能夠有效降低土壤切削挖掘阻力,在1.5、2.5、3.5 MPa 3種土壤硬度條件下,超聲波振動挖掘鏟所對應的降阻率分別為35.1%、40.7%和44.3%,土壤硬度越大,超聲波振動挖掘鏟的降阻效果越明顯。不論有無振動,土壤切削挖掘阻力均隨著土壤含水率的增加先迅速降低后又緩慢回升。由于超聲振動激勵需額外消耗能量,故振動挖掘總耗能并未降低。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
