磁平衡差動保護在高壓同步電動機上的應用
2020-12-03 08:18:02聶善峰
有色設備 2020年5期
關鍵詞:故障
聶善峰
(中鋁工業服務有限公司, 北京 102209)
0 引言
隨著電動機制造技術的提高及工業的大規模發展,3 kV及以上電壓等級的高壓同步電動機在工廠中應用越來越多。在實際運行過程中這些電動機可能出現各種故障或不正常運行狀態,歸納起來這些故障狀態或不正常運行狀態主要有以下幾種類型[1]:
(1)高壓同步電動機定子繞組內部的相間短路;
(2)高壓同步電動機定子繞組內部的單相接地;
(3)高壓同步電動機定子繞組過負荷;
(4)高壓同步電動機運行過程中繞組及軸承過熱;
(5)運行過程中因外部電網電壓波動或故障等原因,導致高壓同步電動機定子繞組低電壓;
(6)高壓同步電動機的失勵磁與失步;
(7)高壓同步電動機出現不正常的非同步沖擊電流;
(8)因電動機內部斷相或接線錯誤等原因導致高壓同步電動機定子繞組三相電流不平衡;
(9)由于拖動的機械設備潤滑等故障而導致高壓同步電動機堵轉;
(10)高壓同步電動機電源電纜外部的故障等。
對于高壓同步電動機引出線及繞組的相間短路故障,一般采用電流速斷保護,用于容量小于2 MW以下的電動機,保護宜采用兩相式。容量較小的電動機,也可采用一個繼電器接于兩相電流之差,但必須滿足靈敏性要求。在正常配置的電流速斷保護不能滿足規范規定的靈敏度要求時,或當容量大于等于2 MW的電動機則應當裝設差動保護裝置(此時,電動機應為6個引出端子,即電動機有中性點引出端子)。保護裝置可采用兩相或三相接線形式并應無時限動作于跳閘。當高壓同步電動機設置自動滅磁裝置時,保護裝置應自動滅磁。
本文僅對高壓同步電動機的差動保護進行討論。
1 差動保護的工作原理
利用基爾霍夫電流定理進行工作的電氣設備保護一般稱為差動保護。正常時流入一個封閉回路的電流和流出的電流應該相等,那么其流入和流出的電流差(差動電流)等于零,也就是把被保護的電氣設備或元件看成是一個閉合區域,當被保護的設備出現不正常運行狀態時,處于被保護區域內設備的電流的流入和流出是不相等的,理論分析證明,此時流入和流出的電流向量值之和的絕對值大于零。當實際檢測出來的差動電流值大于差動保護裝置的實際整定數值時,差動保護動作,并將被保護電氣設備的電源側斷路器斷開(當負荷側安裝斷路器時需同時跳開),發生故障的電氣設備脫離電源。差動保護的保護范圍是在兩輸入端電流互感器之間的電氣設備,可以是電纜、母線或線路,也可以是發電機,同步或異電動機或變壓器等電氣設備。
2 高壓同步電動機的差動保護
一般情況下,常設縱聯差動保護來彌補大型電動機設置的電流速斷保護保護靈敏度的不足的情況。在進行高壓同電動機差動保護動作分析時,是以檢測電動機末端電流(電動機中性點)為基礎,并和始端電流(控制開關或者斷路器出口)以矢量加減進行比較,如果兩測量點的電流值相位和幅值都相同,差動保護不應動作。當有故障發生時,二者產生了偏差,保護功能將按設定的保護動作條件自動啟動。為可靠的實現該保護功能,需要在出口端斷路器及電動機中性點兩處各安裝一組同一型號的CT(圖1中的1LH和2LH),用來保證檢測的電流數值變化的差別不大。從而確定差動保護參數。差動電流接線設置在電流互感器二次側。兩端CT連接以同相、同極性并聯的方式,實現CT之間二次側同極性相連,而保護用電流繼電器接法則以并聯的形式接入電流差后的保護電路中,可通過檢測流過電流繼電器線圈的電流并根據線圈中的電流幅值大小進行判定CT的二次側電流變化值,此時電流繼電器可反應兩側互感器的實際電流之差。為節約投資,在中性點不接地供電系統中電動機縱聯差動保護也可以采用兩相式接線,主要由上述差動繼電器、電流互感器各兩個元件構成。
由上可知,縱差保護是按照循環電流原理構成的,高壓電動機的縱差保護同時要求電動機在正常運行和縱差保護區(縱差保護區為電流互感器1LH、2LH之間的范圍)外故障時,流入差動繼電器中的電流為零,保證縱差保護不動作。
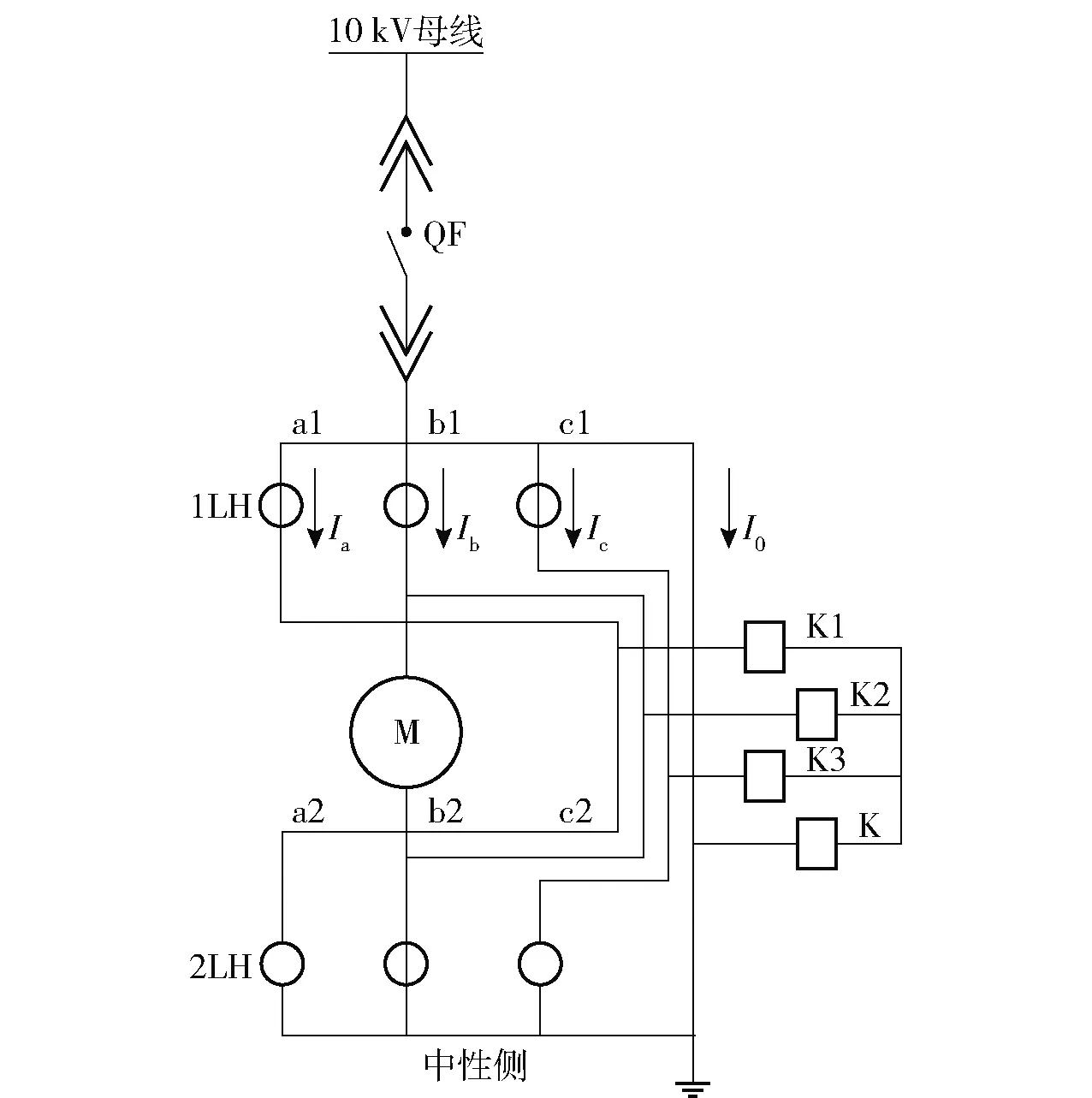
圖1 傳統縱聯差動保護接線原理圖
磁平衡差動保護是自平衡差動保護,有的稱為“小差動保護”,它是基于磁勢平衡原理實現差動保護的一種方法。通常條件下,磁平衡差動保護由三個磁平衡電流互感器和三個對應的電流繼電器組成。它與常規條件下差動保護用電流互感器在使用上有區別,常規電流互感器一次側導線僅需一次穿過CT,而磁平衡電流互感器一次側每相導體則需兩次穿過CT(該CT請見圖2中的TA1、TA2、TA3)。采用磁平衡電流互感器時,在電動機的接線箱處電源接線和中性點接線同樣穿過對應的一組同相磁平衡CT,其同相繞組的兩端一正一反(按電流流入電動機的方向)兩次穿過磁平衡CT,在電動機正常運行時,按照基爾霍夫第一定律流入和流出的電流相互抵消,正常時磁平衡CT二次應無感應電流產生。當電動機運行過程中內部繞組發生短路等故障,則一正一反兩次穿過磁平衡CT時,流入和流出電流產生的磁場不能相互抵消,磁平衡CT的二次側將產生不平衡感應電流,當該感應電流達到設定的保護裝置動作值時,差動保護裝置將動作跳開控制開關(如斷路器)。原理接線圖如圖1所示。
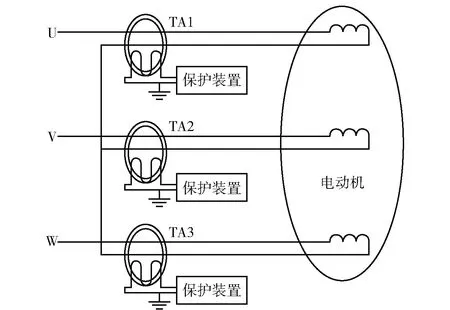
圖2 磁平衡差動保護接線圖
從圖1可以很清晰的看出,磁平衡差動保護的組成是在電動機本體接線端子箱內的繞組出口與中性點側同名相分別加裝一組磁平衡電流互感器TA1、TA2、TA3,其二次繞組分別接至對應的保護裝置(差動繼電器)上形成完整的保護裝置。
磁平衡電流互感器并不是裝設在開關柜內,而是安裝在電動機的接線箱內。電源電纜穿過該電流互感器后,電動機的星形尾端電纜回穿電流互感器后再短接形成中性點。
傳統的縱聯差動保護和磁平衡差動保護有以下不同點:
(1)傳統的縱聯差動保護裝置需要6個電流互感器;對于磁平衡差動保護裝置而言,僅需安裝3個自平衡電流互感器。
(2)傳統的縱聯差動保護接線稍復雜,根據總平面設備配置,控制線路有時較長;而磁平衡差動保護因僅設置一組自平衡電流互感器,其接線相對較為簡單。
(3)受電流互感器飽和特性的影響,傳統應用的縱聯差動保護,在實際應用中會出現誤動的情況。特別是當電動機電源開關柜與電動機操作現場距離很遠時,中性點側CT要負擔過多電纜阻抗負載,按電流互感器的磁飽和特性,這樣會使得電流互感器過早進入磁飽和狀態,從而不平衡差電流增大,保護裝置可能會產生誤動。從基本原理上看,磁平衡差動保護的靈敏度及抗干擾能力要比傳統的縱聯差動保護高出許多,保護動作的可靠性也就相對較高。
(4)傳統的縱聯差動保護往往要求兩組電流互感器的輸入輸出性能完全一致,在性能存在差異時有可能會引起誤動。且在大部分的工礦企業應用中,電動機電源開關柜距離所控制的電動機一般較遠,這樣的話,兩種情況下均要求對控制電纜截面的要大,不經濟;并且對于三角形接線時的電動機差動保護很難實現。
(5)磁平衡差動保護因為只有一組電流互感器,所以不存在兩側CT特性不一致的問題,也就不用比率制動來防止誤動作了。此時的保護整定非常簡單,就是一個純粹的電流保護。
(6)磁平衡差動保護用的電流互感器一般安裝在電動機的接線端子箱內,即電動機繞組出線處,其保護范圍較小,僅僅是電動機本體的內部繞組故障;而傳統的縱聯差動保護用的電流互感器須為兩組,一組電流互感器一般安裝在配電用高壓開關柜斷路器的出口處,另一組電流互感器則安裝在電動機繞組出線接線端子箱中性點處,可以將電源電纜可能出現的故障包含在保護范圍內,該情況下保護范圍相對較大一些。
高壓同步電動機的磁平衡縱差保護可以靈敏反應定子繞組的相間短路故障(含定子繞組對另兩相中性點短路),但不能反應電動機內部同相定子繞組的匝間短路和定子繞組的斷相故障,因此,就反應故障類型來說,與常規縱差保護無區別。在電動機啟動、外部短路故障時高壓電動機流向配電系統的反饋電流、外部短路故障切除后高壓電動機自動啟動過程中不會形成不平衡電流,這與常規縱差保護是有區別的。對外部單相接地故障,則有不大的不平衡電流。若電動機所在網絡的電容電流足夠大,磁平衡式差動保護還可以反應單相接地短路故障。
3 異步電動機磁平衡差動保護整定計算
3.1 條件1:按躲過外部單相接地短路時產生的不平衡電流
配電系統在正常運行時,根據基爾霍夫電流定律,TA僅能檢測電動機繞組內部的很小的對地及相間電容電流。當電動機端子箱以外發生單相接地短路時,故障相電壓為零,故障相的TA不能檢測出電動機繞組對地正常的電容電流;在中性點不接地系統中,非故障相對地電壓則升高為系統的線電壓,此時非故障相的TA則能反映流過電動機繞組的對地及繞組間的電容電流。
Iset=KrelUrmωCp/nTA
(1)
式中Iset—磁平衡縱差保護整定值,A;
Cp—電動機單相繞組對地電容值,μF;
ω—電源角頻率,ω=2πf;
UrM—電動機額定電壓,kV;
Krel—可靠系數,取1.1~1.3;
nTA—零序電流互感器變比。
3.2 條件2:按躲過啟動(堵轉)時的不平衡電流
由于導體穿TA時不能完全一致,流人與流出TA的電流在TA中的因空間位置的不對稱、電動機繞組的對地電容不一致和TA本體的鐵芯磁路生產制造時不對稱,在電動機啟動和正常運行時,TA二次側總能或多或少的檢測到一定量的不平衡電流(ko)。通常情況下電動機正常運行時,TA的實測ko的值不大于0.5%的電動機額定運行電流。
因此,與傳統的縱聯差動保護一樣,磁平衡差動保護整定時也必須躲過電動機啟動(堵轉)時的不平衡電流,即:

(2)
根據經驗取
Iopk=(0.15~0.20)IrM/nTA
式中Krel—可靠系數,取1.5~2;
Iunbmax—電動機在啟動過程中的最大不平衡電流,A;
Ker—電動機出線端子兩側磁不平衡誤差,ko,取0.5%;
Kst—電動機的額定啟動電流倍數(一般最大最大取Kst=7,也可根據高壓電動機產品資料選擇);
IrM—電動機的額定工作電流,A;
nTA—選擇的零序電流互感器變比。
一般情況下,按躲過電動機啟動(堵轉)時的不平衡電流計算的整定電流值,要比按躲過外部單相接地短路時的不平衡電流值大一些。參考文獻或保護廠家所推薦的磁平衡差動保護設計整定值(一般提供的是一次側電流值)都約為5%的電動機額定運行電流。
4 同步電動機磁平衡差動保護的整定計算
由電動機定子繞組中每相正序電容CMl、每相零序電容CM0所構成的磁平衡差動保護回路中的不平衡電流,其值為:

(3)
(4)
(5)
式中IunbA、IunbB、IunbC—磁平衡縱差保護的A、B、C相不平衡電流,A;
Iunb—磁平衡縱差保護的相不平衡電流,A;
Iop—保護動作電流,A;
Iopk—繼電器動作電流,A;
CM1—定子繞組每相正序電容,μF;
CM0—定子繞組每相零序電容,μF;
ω—電源角頻率,ω=2πf;
Krel—可靠系數,取1.1~1.3;
nTA—零序電流互感器變比。
5 同步電動機的單相接地電容電流
隱極同步電動機的電容電流:
(6)
式中SrM—電動機額定容量,MVA;
UrM—電動機額定電壓,kV;
K—取決于絕緣等級的系數,當溫度為15~20 ℃時,K=0.018 7。
凸極同步電動機的電容電流:
(7)
式中SrM—電動機額定容量,kVA;
UrM—電動機額定電壓,V;
n—電動機轉速,r/min:
K—取決于絕緣等級的系數,對于B級絕緣,當溫度為25 ℃時,K≈40。
定子繞組每相零序電容(即對地電容):
(8)
6 接地系統與磁平衡差動保護
因現有礦山設備隨著礦山向大規模發展而大型化,礦山大量使用的交聯聚乙烯電纜,6 kV或10 kV配電系統的電容電流也變的越來越大,按照現行國家標準和非金屬礦山及有色礦山行業標準的要求,礦山企業配電系統的6 kV或10 kV系統的中性點接地方式一般推薦采用中性點不接地或中性點諧振接地方式,兼顧配電系運行及投資需求,也有企業采用中性點經高電阻或低電阻接地的形式。
6.1 中性點不接地系統
GB/T 50064—2014規定,不直接連接發電機的6 kV或10 kV系統,單相接地電容電流在不大于10 A時采用中性點不接地方式;當直接連接有發電機運行不要求瞬時切除發電機,且系統的單相接地電容電流限制為不大于4 A(6 kV)或3 A(10 kV)時,配電系統可采用中性點不接地方式。
在中性點不接地配電系統中,當電動機內部繞組發生單相接地故障時,接地點的單相接地電流為同一變壓器供電全系統中另外兩個正常相對地電容電流之和,此數值也是磁平衡差動保護電流互感器TA對應檢出的一次電流值。
經驗表明,6 kV或10 kV中性點不接地系統中,當系統單相接地電容電流大于8%的電動機額定運行電流時,磁平衡差動保護能夠可靠的反映電動機單相接地短路故障。當單相接地故障不要求跳閘時,此時可將保護動作區間劃分為兩段進行整定,定值范圍:一段為Iset≤Iop≤10 A,保護信號動作出口報警;另一段為Iop≥10 A,保護信號動作出口跳閘。
在系統單相接地電容電流不大于8%的電動機額定運行電流時,可忽略磁平衡差動對電動機的單相接地故障的保護,而由小電流選線等其他裝置配合去完成電動機的單相接地故障保護,而磁平衡差動保護則被用來保護電動機相間、匝間短路故障。這樣設置,既可保證電動機啟動、正常運行,在電動機外部短路時,磁平衡差動保護均不誤動;而電動機內部發生相間短路時,則能可靠動作于跳閘,滿足實際運行工況的需求。
6.2 中性點諧振接地
按GB/T 50064—2014的規定,不直接連接發電機的6 kV或10 kV系統,當單相接地電容電流大于10 A時,又需要在接地故障條件下運行,可采用中性點諧振接地;當直接連接有發電機運行不要求瞬時切機時,并且單相接地電容電流大于4 A(6 kV)或3 A(10 kV)時,系統應采用中性點諧振接地。根據GB/T 50064—2014及SH/T 3060—2013等的要求,經消弧線圈補償后,故障點殘余電流應不大于5 A,當直接連接有發電機時應不大于4 A(6 kV)或3 A(10 kV)。
在系統單相接地電容電流不小于8%的電動機額定電流時,可按要求進行整定值計算。必須注意磁平衡差動保護與消弧線圈補償應聯動,即系統單相接地故障時,消弧線圈補償裝置經延時t1補償;磁平衡差動保護裝置信號瞬時動作出口報警(此時能夠準確反映電動機具體哪一相發生了單相接地故障),延時t2(t2>t1)動作出口跳閘,保證在電動機內部單相接地故障且失去消弧線圈補償時,也能可靠跳閘。
在系統單相接地電容電流不大于8%的電動機額定運行電流時,磁平衡差動保護可以用來保護電動機相間短路故障。
7 電流互感器與磁平衡差動保護
多個現場運行經驗總結表明,由于差動繼電器兩差動輸入端的電流互感器暫態特性往往難以完全一致,在電動機起動或自起動過程中的傳統縱差動保護常常導致不平衡電流增大,從而可能引起縱差動保護的誤動作。因此,個別應用場合甚至考慮采用著重考慮瞬時性能的供保護用的互感器TP類暫態保護用電流互感器。對磁平衡式差動保護而言,則不會出現互感器的飽和而誤動情況,一般電動機的保護并不需要過多的考慮其暫態特性,P類電流互感器即可滿足工程要求。另外,基于利用磁平衡原理,磁平衡式電流互感器二次側在斷線也不會出現過電壓現象,這些都是傳統的電流縱差動保護無法實現的。
磁平衡式差動保護互感器的安裝一般都采用電纜穿芯的結構形式,為了保證互感器的感應準確性,就要求在安裝時一定要注意讓兩側導線穿過一次側線圈時盡量位于正中心。而將互感器直接安裝在電動機本體上則更容易實現磁平衡式差動保護的接線,但這樣的結構要求高壓電動機的接線箱體積增大,對高壓電動機的接線箱設計和制造帶來了一定的困難。
8 高壓電動機磁平衡差動保護應用舉例
某礦山磨礦及分級車間有半自磨機和球磨機各2臺。
半自磨機電機(型號:TMW2100- 30/2860)參數如下:
PrM=2 100 kW,UrM=10 kV,IrM=141.2 A,n=200 r/min,cosφ=0.9(超前)
球磨機電機(型號:TMW2700- 30/2860)參數如下:
PrM=2 700 kW,UrM=10 kV,IrM=181.3 A,n=200 r/min,cosφ=0.9(超前)
(1)對于球磨機電動機,凸極同步電動機
電動機電容電流:
定子繞組每相零序電容
磁平衡差動保護動作電流:

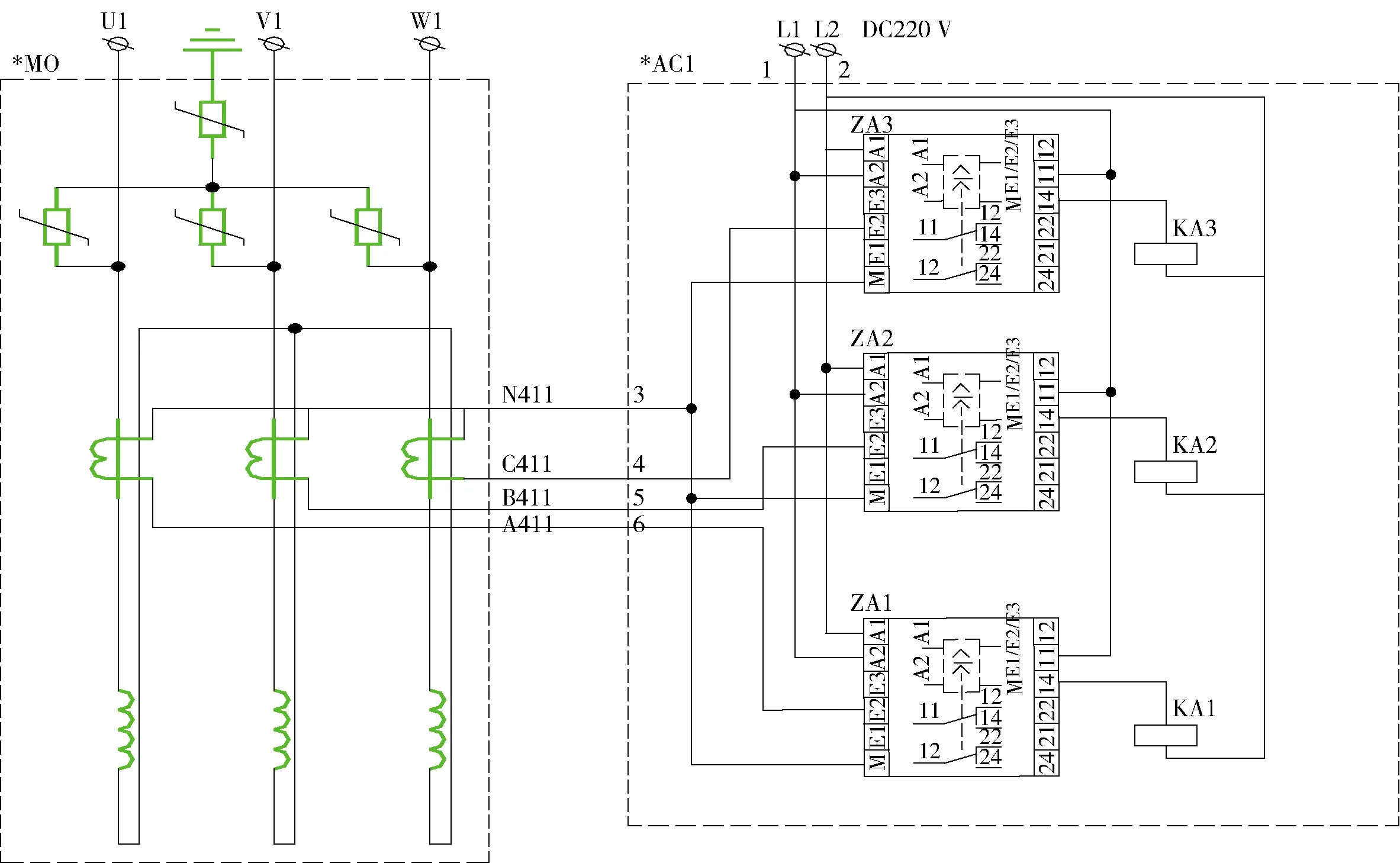
圖3 磁平衡差動保護箱原理圖
選用50/5 A,10P10級2 VA,Iopk=0.04 mA,最低值整定0.1 A。
(2)對于半自磨機電動機,凸極同步電動機
電動機電容電流:
定子繞組每相零序電容:

磁平衡差動保護動作電流:
選用50/5 A,10P10級2 VA,Iopk=0.03 mA,最低值整定0.1 A。
注:對于凸極同步電動機而言,按躲過不平衡電流整定比較安全。因為當差動整定值偏小時,有可能產生誤動。電動機磁平衡保護整定值一般按電動機額定運行電流的10%~20%整定。
該磁平衡差動保護箱原理如圖:
9 結語
本文研究分析了高壓同步電動機采用磁平衡式電流互感器進行差動保護的原理及整定計算一般原則。并與傳統意義上的縱聯差動保護相比,闡述了其基本工作原理及性能特征及優缺點。對電動機正常運行、起動、以及區內外故障的電流分析,給出了磁平衡式差動保護的整定原則和一般的計算方法。研究結果表明,基于磁平衡式的工作原理,其差動保護能夠可靠反應高壓同步電動機內部的相間短路故障以及單相接地短路故障,并在保護區外故障以及起動過程中具有較高的可靠性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
