具有網(wǎng)絡加塞的離散隨機系統(tǒng)最優(yōu)線性濾波研究
2020-12-04 08:43:44余永龍
無線互聯(lián)科技 2020年16期
余永龍
(宿遷學院 文理學院,江蘇 宿遷 223800)
0 引言
由于控制系統(tǒng)數(shù)據(jù)的網(wǎng)絡化傳輸,控制系統(tǒng)濾波器接收端會出現(xiàn)數(shù)據(jù)失真,佟英浩等[1]研究了事件觸發(fā)驅動的非線性系統(tǒng)有限時間狀態(tài)估計器設計;敖偉等[2]針對受攻擊信息的控制系統(tǒng),系統(tǒng)受攻擊信息是一種網(wǎng)絡加塞現(xiàn)象,研究了其分布式安全狀態(tài)估計。這些研究都提出網(wǎng)絡化傳輸過程中出現(xiàn)的各種數(shù)據(jù)失真。除了濾波器接收端數(shù)據(jù)失真,系統(tǒng)自身具有隨機時滯和相關噪聲的濾波也得到廣泛關注。Li等[3]描述了有限步相關噪聲和縱向相關噪聲的網(wǎng)絡控制系統(tǒng),并設計了其最優(yōu)濾波。
本文將研究同時具有乘性噪聲、縱向相關噪聲、有限步自相關過程噪聲、一步隨機時滯和網(wǎng)絡加塞系統(tǒng)的最優(yōu)線性濾波。采用狀態(tài)擴維的方法,設計出最優(yōu)線性濾波,并采用例子驗證算法的有效性。
1 研究的問題
考慮如下的離散隨機系統(tǒng):
(1)
(2)
(3)

(4)

(5)
uk是與其他噪聲不相關的服從Bernoulli分布的隨機變量,且P{uk=1}=α,其中,0≤α≤1,N∈[10,),約定N≥10時,系統(tǒng)開始出現(xiàn)網(wǎng)絡加塞現(xiàn)象。

2 最優(yōu)線性濾波
定理1 對擴維后的系統(tǒng),有最優(yōu)線性濾波:
(6)
(7)
(8)
(9)
(10)
(11)
(12)
3 仿真算例
設:

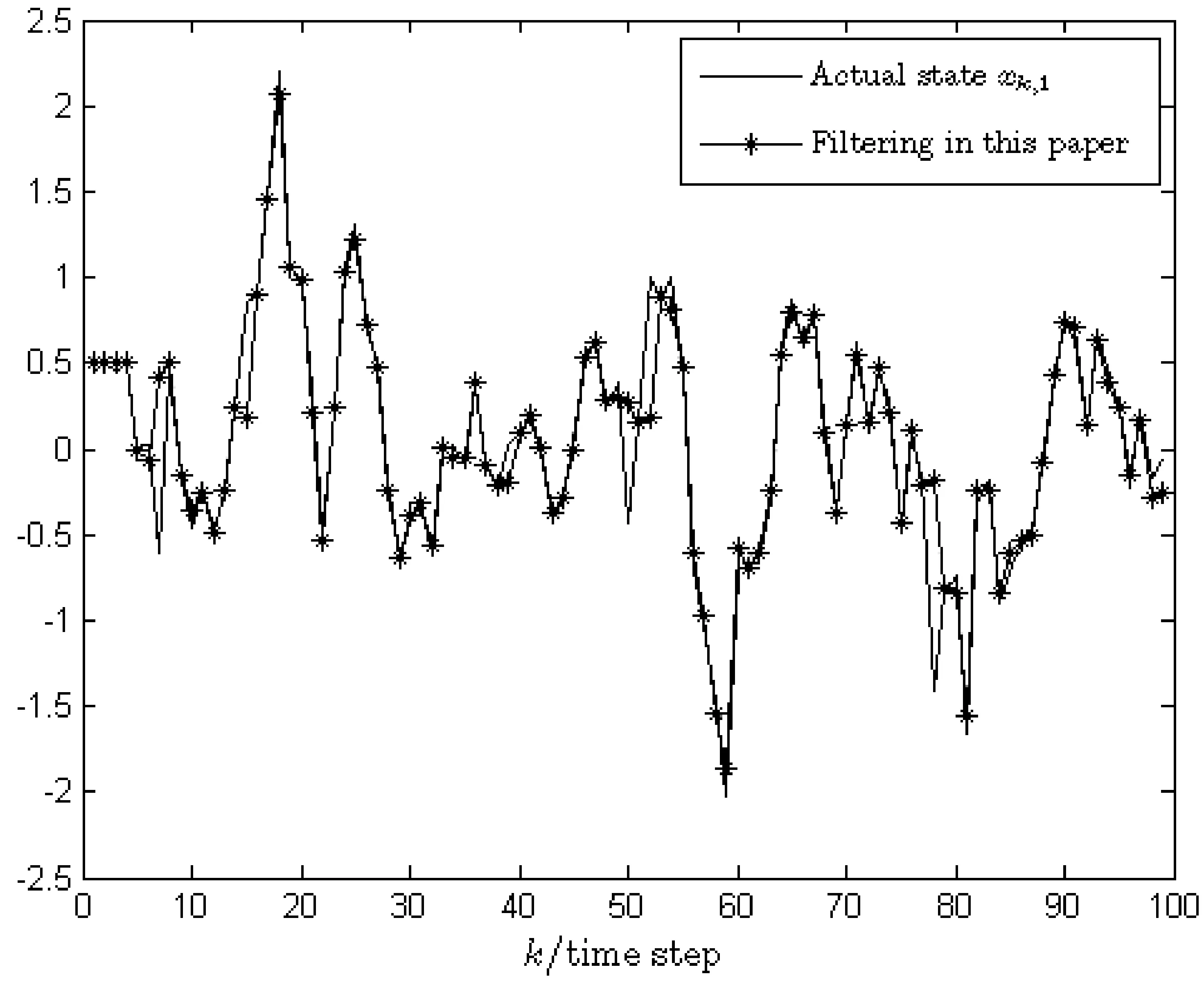
圖1 xk,1及其估計的軌跡
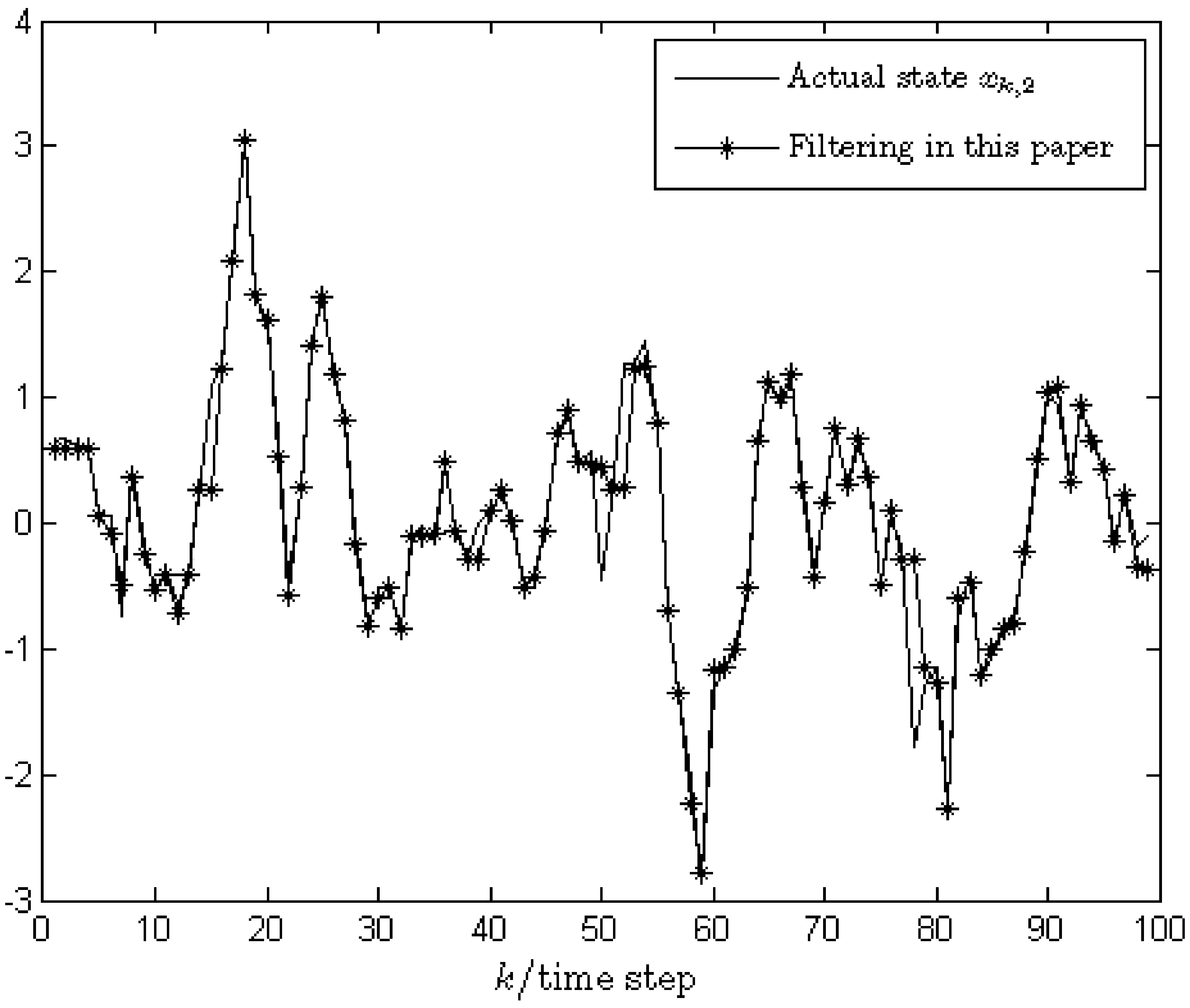
圖2 xk,2及其估計的軌跡
4 結語
本文研究了同時具有乘性噪聲、縱向相關噪聲、有限步自相關噪聲、隨機時滯和網(wǎng)絡加塞離散線性隨機系統(tǒng)的最優(yōu)線性濾波。基于狀態(tài)擴維的方法,在最小均方誤差意義下設計了一個新的最優(yōu)線性濾波器。最后,仿真例子驗證了濾波器的有效性。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34