車身焊裝生產線上多臺工業機器人應用技術分析
2020-12-04 07:49:00邱志新肖迎俊
無線互聯科技 2020年16期
邱志新,馬 樂,肖迎俊
(哈爾濱職業技術學院,黑龍江 哈爾濱 150081)
0 引言
新時期,汽車工廠焊裝車間工業機器人數量較多,但系統結構十分復雜,極易出現故障,影響生產線工作效率。因此,有必要深入分析車身焊裝生產線中工業機器人應用技術,實現焊裝與搬運自動化,進而節省生產成本和人力資源,提升機器人管理水平,拓展焊裝生產線自動化技術的應用范圍,提高生產效率。
1 車身焊裝生產線工作內容
焊裝工廠主要生產汽車白車身,原材料包含結構強化組件、薄板沖壓件、活動件合頁、螺栓等[1]。車身主要借助沖壓方式,將鋼板焊接為組合件,在安裝前后蓋和裝配車門后組成白車身。焊裝工廠主要通過綜合生產線生產車身產品,包含涂膠、焊接、打號、包邊等設備。伴隨著生產量的逐漸提升,當前,自動化焊裝生產線逐漸普及。焊裝工廠中一般具有較多機器人數量,主要負責搬運、焊接、涂膠等工作,此外,還有清掃、包邊、打刻機器人。機器人類型通常選擇多關節垂直型號,包含本體結構、電纜和控制柜,典型組成結構如圖1所示。
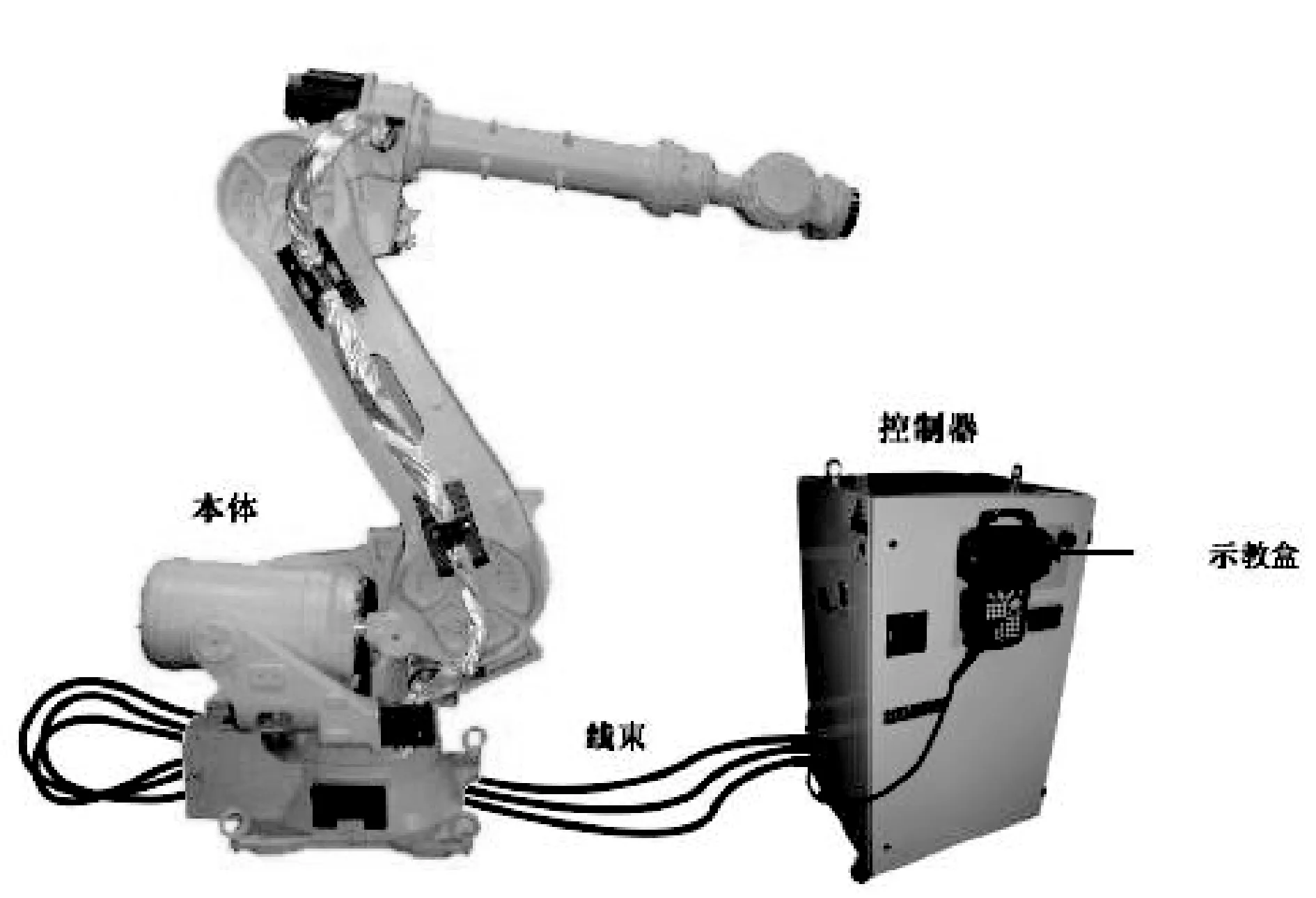
圖1 典型工業機器人組成結構
2 車身焊裝生產線中工業機器人應用技術探究
2.1 系統設計內容
工業機器人系統中通常包含PLC、機器人、夾具等結構,其中,PLC是焊裝生產控制系統,還可以控制料框、底座檢測等模塊。PLC結構包含機器人PLC和主控制柜PLC、遠程輸入和遠程站,夾具系統內存在直線導軌、電缸、框架制作等結構。通過增加傳感器設備,依據接線圖設置線路和輸入輸出位置。機器人系統模塊包含運行程序、PLC程序,能夠控制機器人完成工件測距、搬運、抓取、距離過大報警、補償程序等內容。機器人可以通過收集相關數據信息,在測距后計算補償數值,借助預定程序完成工作循環。
2.2 機器人系統集成模塊
2.2.1 集成思路
多臺機器人集成需要分析樣本空間,確保其處于相同區域,若范圍較大則應分段控制。從技術層面分析總線最大傳輸距離超過1 000 m,但由于相關干擾和接頭因素造成的損耗,總線距離需小于400 m。同時,焊裝車間中磁場不穩定因此會出現通信阻礙問題,通常情況下,總線長度應小于200 m,機器人集成過程包含以下內容:選擇機器人、制定電氣方案、選擇控制器和元器件、制作圖紙、布置電路、調整工具、現場調試[2]。
2.2.2 硬件設備選擇
(1)控制柜和工業機器人的選擇。選擇關節式工業機器人,其型號可以是KUKA IR761/150、KUKA IR761/125等。控制器硬件選擇80386 CPU,主要完成數據運算、伺服控制,借助CPU控制人機接口和I/O。控制器主要利用總線結構,包含主控制板、接口控制板、軸控制板,安全電路板,借助數據配置的形式開展工作。(2)控制柜和焊鉗。選擇C型和X型一體化機器人焊鉗,焊接桿與焊接變壓器作為整體便于抓取操作,通過增加焊接的截面積優化焊接質量。此外,在硬件設備配置過程中,還包含車身焊裝、輸送、電極修磨等模塊。
2.2.3 集成方案設置
可以針對某一生產線劃分為4個部分,即主線、側圍、緄邊、離線機器人,借助以太網完成連接。集成過程如下。
(1)側圍機器人集成。側圍工作主要通過往復桿傳輸,因此,需要將機器人集成于控制柜PLC內,夾具、往復桿設備、機器人之間應完成信號交互,使機器人借助PROFIBUS現場總線向PLC傳輸信息。相關安全信號可以利用現場I/O形式向PLC傳輸,通過邏輯編程的方式完成信號交互。
(2)主線機器人集成。本課題將主線機器人劃分為兩個部分,由于焊接車間中強電對于弱點具有較大干擾,因此利用3個PLC對其進行邏輯處理。借助相同控制單元對現場夾具、機器人集成完成控制。主線與機器人之間可以增加干擾區,通過CPU傳輸車型數據,機器人也能夠向CPU發送報警信號,完成數據安全互鎖,避免機器人工作過程中出現傳輸碰撞。此外,以太網能夠實現焊裝車間的數據共享和維護,借助以太網交換機控制網絡機柜,依據網絡可靠性、實時性完成統籌設計。中心控制室是集成系統的核心,對焊裝車間進行集中管理,確保車間以太網交換機和控制室之間構成閉環,保證其內部信息交換。
2.3 軟件應用設計模塊
2.3.1 防撞技術
當多個機器人合作完成焊裝工作時,該生產線系統為防止機器人之間操作碰撞,需要科學控制其運動軌跡。規劃目標為確保生產節拍,找尋最優路徑降低機器人間的干擾。借助機器人仿真技術消除干涉范圍,加強對機器人的控制。當定位機器人之前的實際干涉區時,通過示教編程方式實現分區、分段的示教。分析、等待生產機器人工作程序,明確區域代碼,進而在上位機程序內完成區域代碼分析,輸出數據并控制焊裝機器人。
2.3.2 運動軌跡順暢技術
若工業機器人生產過程中運動軌跡不平滑、流暢,高速移動過程中安全系數較低,極易影響車身焊裝工作的質量。通常情況下,機器人實際運動軌跡屬于人工示教模式,借助控制器執行連續軌跡命令,如“直線控制LIN”“點到點控制PTP”“圓弧控制CIRC”等指令[3]。
由于運動軌跡的線段連接位置不光滑,其速度不均衡,因此,借助Advance run模式可以提前計算控制器指令。利用“LIN P C_DIS”“PTP P C_PTP”解決上述問題,提升工業機器人運動軌跡的流暢性。此外,建議優化焊鉗技術。針對焊裝生產線中多臺工業機器人同時工作的情況,為了節省生產成本、降低工作空間,可以借助相同輸入/輸出模式配置兩臺焊鉗,防止因焊鉗實際結構的差異性導致工業機器人動作時序和實際結構不同,規范焊接參數。同時,可以通過電極修磨器對焊鉗完成調整配置,利用自動識別焊槍的電機更換報警功能,實現多模塊統一。借助焊接控制器設置多種焊接程序,在生產線工作程序內完成焊鉗識別,提升工業機器人工作精確性。
2.3.3 安全防護技術
(1)人身安全防護。工業機器人生產過程中具有一定危險性,需要在實際工作中借助護欄完成保護,防止相關人員誤入危險區。通過設置安全信號(Usersafe)和急停措施(Emergeney Stop)實現技術應用。當開啟急停按鈕后,機器人會延遲1-3秒停止工作。當發送Usersafe信號后,機器人會立即離開初始位置。
(2)設備防護。工業機器人危險性不僅針對工作人員,也會對其他生產線、機器人造成影響。通過軟硬件多重判斷的方式分析機器人與生產線位置關系,利用原位開關、時間延時等裝置分析機器人循環工作進程。利用信號中斷分析處理焊接控制器、循環水冷卻回水流量、焊鉗工作狀態等內容。
4 結語
綜上所述,通過課題分析發現車身焊裝機器人在設計、安裝、調試過程中處于穩定運行狀態,其定位精確度、系統穩定性滿足技術任務書中標準,可以達到用戶使用需求。因此,有必要在探究工業機器人應用技術時結合工業工程理論,驗證生產、分析多個環節,開展系統拓展應用項目,節省人力、資金成本。