螺旋槳激勵水下艇體振動的試驗及數值研究*
2020-12-07 09:19:10徐野,熊鷹,黃政
國防科技大學學報 2020年6期
關鍵詞:振動
徐 野,熊 鷹,黃 政
(海軍工程大學 艦船與海洋學院, 湖北 武漢 430033)
潛艇振動的激勵源主要有艇內設備、螺旋槳和艇體表面湍流脈動等。近幾十年來,各種主被動控制技術的應用使主機等機電設備的機械噪聲得到了有效控制,潛艇在低速巡航時,艇體表面湍流脈動較弱,此時螺旋槳非定常負載通過軸系激勵艇體的振動就凸顯出來。國內外學者針對該問題開展了大量機理分析及控制措施的研究。Pan等[1]通過試驗研究了水箱中螺旋槳激振力沿軸系到支撐板的傳遞特性,證明了推力軸承剛度對系統特性影響顯著,試驗中螺旋槳運轉于靜水中,其激振力的合理性還有待研究。Dylejko等[2]建立描述螺旋槳-軸系-艇體系統的傳遞矩陣,采用四端參數法研究了耦合系統的振動特性,認為建立槳軸系統動力模型時應考慮艇體的影響。Merz等[3]采用有限元和邊界元方法對螺旋槳-軸系-艇體耦合系統的振動聲輻射進行了研究。Caresta等[4]建立組合殼體及槳軸系統的運動方程,采用解析法計算了耦合系統在縱向及橫向簡諧激勵力作用下的結構響應與聲輻射,并探討了結構參數的影響。曹貽鵬[5]采用空氣中臺架試驗的方法研究了螺旋槳縱向激勵力引起艇體振動的控制措施。吳仕昊[6]開展了吊放于水中的殼體在激振器作用下振動響應的試驗研究。上述研究中的試驗方式大多為空氣中的臺架試驗,即使是文獻[1]將螺旋槳置于水箱中,也無法考慮艇尾伴流場對螺旋槳的作用;計算方法多是采用單位簡諧力作為激勵源的諧響應分析,無法反應螺旋槳真實激勵特性,適用于分析結構振動特性,但不利于振動響應的準確預報。
針對以上研究現狀,本文在循環水槽中開展了艇尾伴流場中螺旋槳誘導艇尾脈動壓力及螺旋槳激勵水下艇體振動響應的測量試驗,分析了脈動壓力和振動響應的特性和變化規律;在驗證了螺旋槳水動力性能和艇體伴流場計算準確性的基礎上,采用計算流體動力學(Computational Fluid Dynamics, CFD)方法計算艇后螺旋槳的非定常負載;建立試驗裝置耦合系統整體有限元模型,采用模態疊加法計算其在螺旋槳激勵作用下的強迫振動響應,并與試驗值進行對比分析。
1 螺旋槳脈動壓力及艇體振動響應測量試驗
1.1 試驗模型
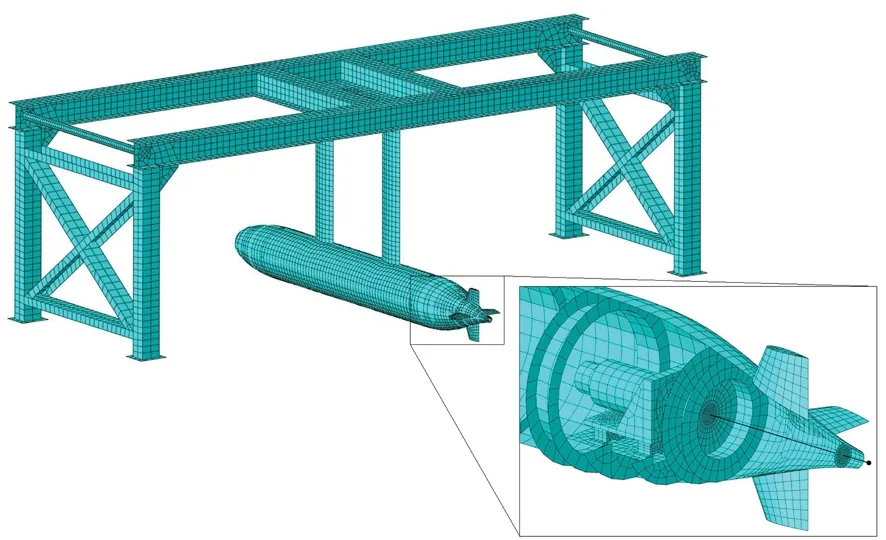
試驗對象的艇體為1 ∶1.25的SUBOFF主體+尾翼模型,如圖1所示,主體采用鋼制,整艇水密;尾翼采用聚四氟乙烯制作;螺旋槳模型為鋁制,分為四葉槳INSEAN E779A和五葉槳DTMB 4382兩種,由伺服電機驅動。模型主要參數為:總長L=3.485 m,直徑D=0.406 m,螺旋槳直徑d=0.180 m。試驗場地為循環水槽,如圖2所示。模型通過兩個鋼制劍桿吊裝于水槽上方支架上,支架立柱直接安裝于地面,不與水槽接觸,可減小試驗時水槽振動的干擾。

(a) 艇體(a) Hull
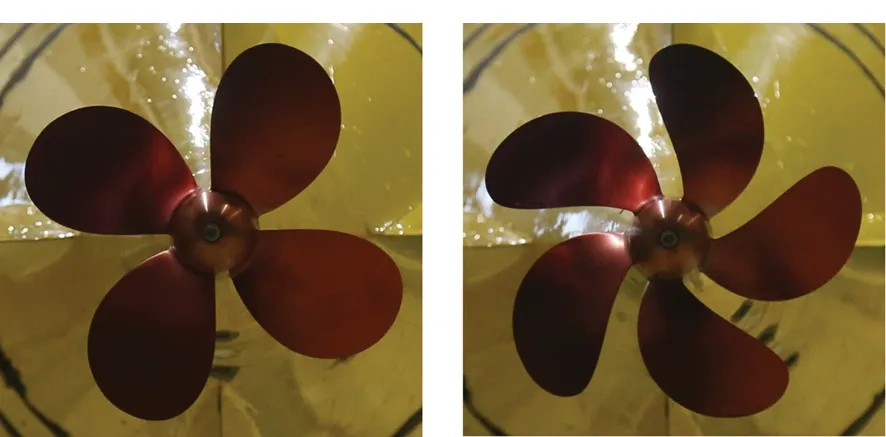
(b) E779A螺旋槳(b) E779A propeller (c) 4382螺旋槳(c) 4382 propeller圖1 試驗模型Fig.1 Test model

(a) 模型在循環水槽中的安裝(a) Installation of the model in circulating water channel

(b) 水下艇體(b) Underwater hull圖2 試驗場地Fig.2 Test site
在螺旋槳前方的艇尾殼板底部布置4個壓力傳感器,用于測量螺旋槳誘導的艇尾脈動壓力。其中1#、2#測點位于艇體正下方(尾翼后高伴流區),3#、4#測點位于斜下方45°(尾翼間低伴流區),1#、3#測點與槳盤面的軸向距離為0.58d,2#、4#測點與槳盤面的軸向距離為0.93d,具體布置情況如圖3(a)所示。
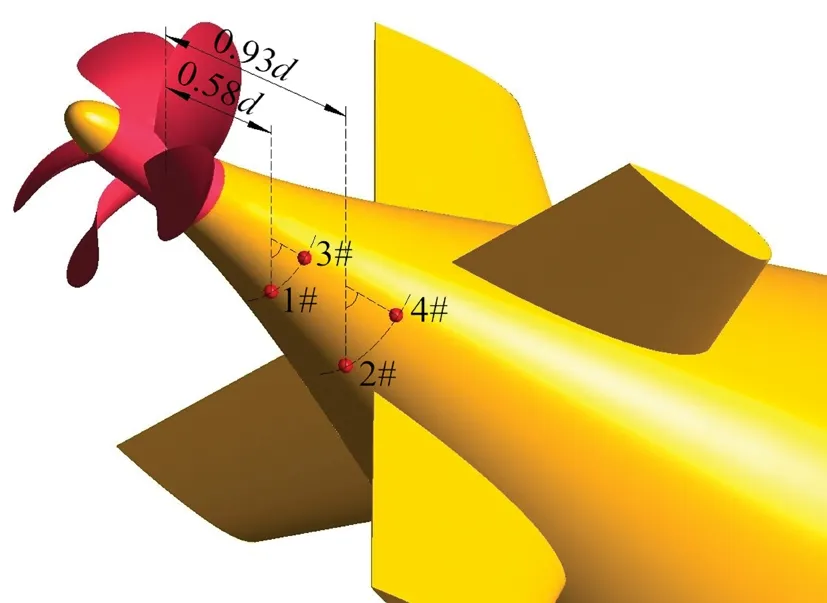
(a) 壓力傳感器(a) Pressure sensors

(b) 加速度傳感器(b) Acceleration sensors圖3 傳感器布置Fig.3 Distribution of sensors
在艇體內部布置加速度傳感器,在一些位置處還布置了若干不同方向的傳感器,具體布置情況如圖3(b)及表1所示(表中x為軸向,y為橫向,z為垂向)。
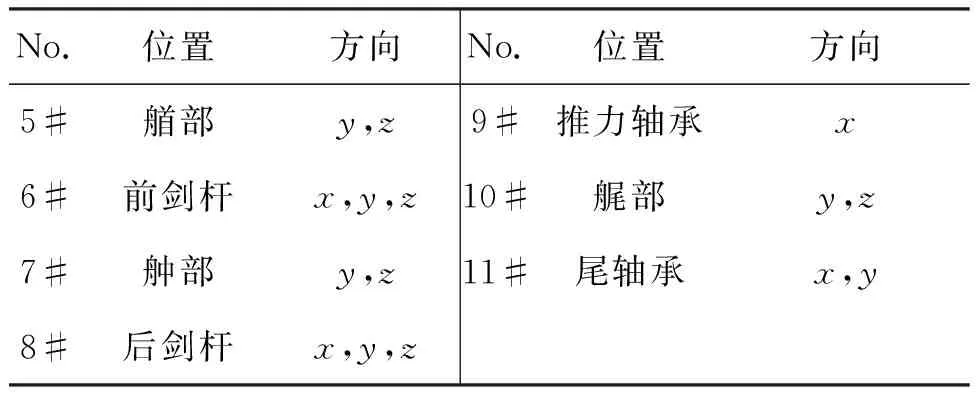
表1 加速度傳感器位置及方向
1.2 試驗內容
根據循環水槽和電機能力確定水槽的四個流速工況(流速V分別取1 m/s,1.5 m/s,2 m/s,2.5 m/s)及每個流速工況下螺旋槳的五個轉速工況(轉速n分別取8 r/s,10 r/s,12 r/s,14 r/s,16 r/s),共20種工況。首先測量安裝E779A槳時每種工況下的艇尾脈動壓力和艇體振動加速度,然后換裝4382槳,重復上述試驗。將測得的脈動壓力和振動加速度時域信號進行快速傅里葉變換(Fast Fourier Transform, FFT),得到其頻譜,用于進一步分析。
1.3 試驗結果分析
取V=1 m/s、n=8 r/s為工況1,V=1.5 m/s、n=12 r/s為工況2,V=2 m/s、n=16 r/s為工況3,三種工況下螺旋槳進速系數相同,負載逐漸增大,選取以上三種工況進行分析。由于頻譜中軸頻、葉頻和2階葉頻處峰值較為明顯,且均在本文研究的低頻范圍內,因此選取以上三個頻率處的幅值進行分析。分析時將幅值的單位換算為dB,參考壓力取1×10-6Pa,參考加速度取1×10-6m/s2。脈動壓力p測量結果如圖4所示,圖中每個測點處的三組數據從左至右分別為軸頻、葉頻和2階葉頻處幅值,可見脈動壓力幅值在葉頻處最大,且隨螺旋槳負載增加而增大,隨與螺旋槳距離增大而減小,E779A槳脈動壓力在尾翼后的高伴流區(1#)幅值最大,4382槳則在尾翼之間的低伴流區(3#)幅值最大。
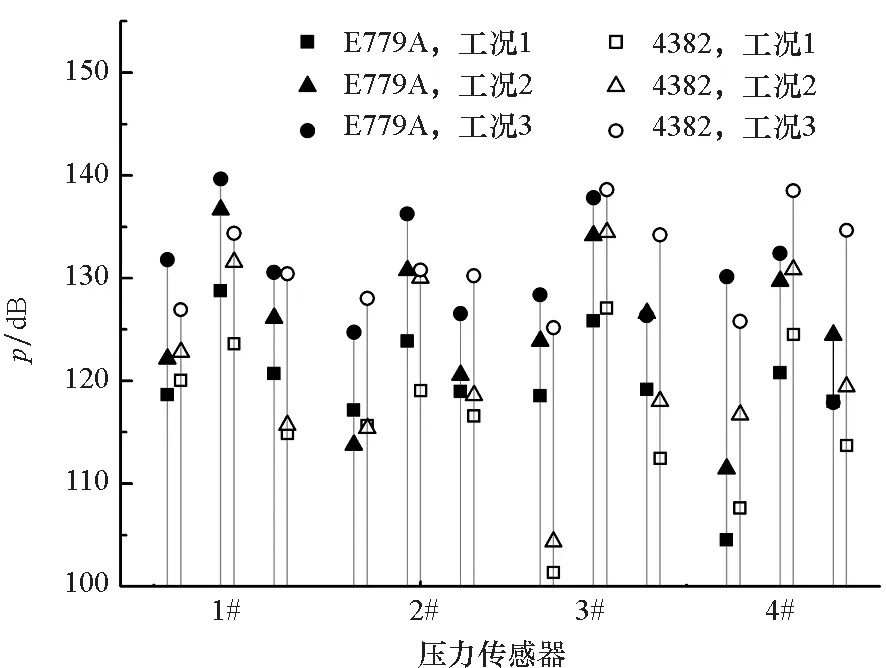
圖4 脈動壓力測量結果Fig.4 Measuring results of fluctuating pressure
E779A槳部分測點振動加速度La測量結果如圖5所示,每個測點處的三組數據從左至右分別為軸頻、葉頻和2階葉頻處幅值。由圖可見:大部分測點的振動響應隨螺旋槳負載增加而增大;受模型本身的復雜振動特性以及電機和環境振動等干擾因素的影響,部分測點葉頻處幅值比軸頻、2階葉頻處更小,且少數測點的振動響應并未隨螺旋槳負載增加而增大。
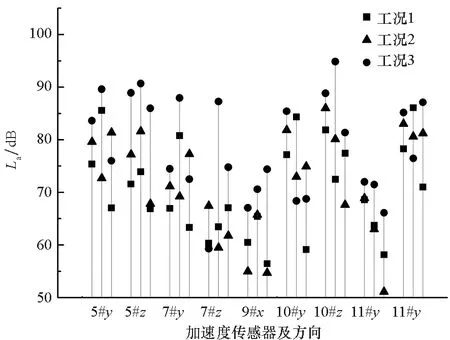
圖5 振動加速度測量結果Fig.5 Measuring results of vibration acceleration
為研究螺旋槳激勵特性與槳葉數的關系,同時測量了軸向及側向(側向包括橫向和垂向)振動響應的測點(6#、8#、11#)進行分析。將兩槳所有工況下的葉頻處側向加速度al與軸向加速度aa的比值進行對比,如圖6所示。由圖可見:大部分4382槳的al/aa大于E779A槳,說明其激勵引起的側向振動響應比E779A槳更強;大部分E779A槳的aa/al大于4382槳,說明其激勵引起的軸向振動響應比4382槳更強;受電機及環境振動等干擾因素的影響,圖中也有少部分數據并未呈現此規律。該現象與槳葉數和伴流場的關系有關,艇體尾翼產生四周期伴流場,當螺旋槳為四葉時,周向對稱的四片槳葉同時進入高或低伴流區,各葉片的推力將同時達到高或低值,產生的軸向激振力較大,而側向激振力因周向對稱性可以相抵消而較小;當螺旋槳為五葉時,五片槳葉不能同時進入高或低伴流區,各葉片的推力高低值會因錯位而補償,產生的軸向激振力較小,而側向激振力因周向非對稱性無法相抵消而較大。
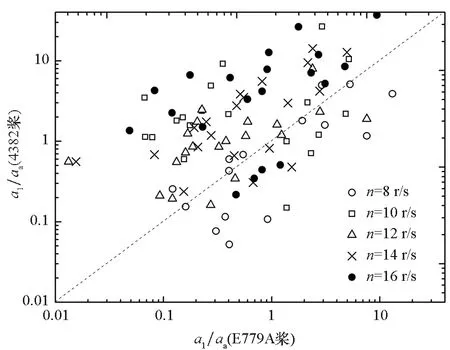
(a) al/aa
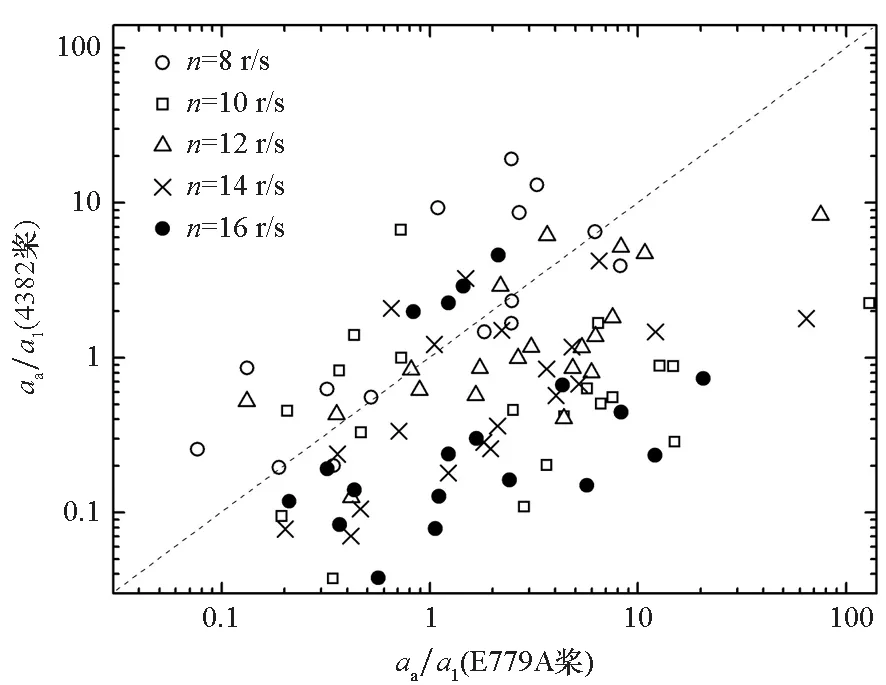
(b) aa/al圖6 兩槳al與aa比值的對比Fig.6 Comparison between the two propellers′ ratio ofal and aa
通過分析各測點橫向及垂向振動響應頻譜,能夠看出特定譜峰頻率處的振動響應與測點位置之間具有一定的關系。圖7給出了工況2時艇體各測點在特定譜峰頻率處的橫向及垂向振動響應(E779A槳),從圖中可以看出,這些頻率處的加速度幅值在艇首、中、尾部較大,在劍桿處較小,基本呈一階彎曲振型。有限元計算得到的艇體一彎模態振型如圖8所示,其中圖8(a)~(b)為橫向一彎模態,固有頻率在80 Hz左右;圖8(c)~(f)為垂向一彎模態,固有頻率在70~75 Hz之間。由此可見,其范圍與測量結果中的一階彎曲振型頻率較為一致,說明本文試驗與計算結果吻合較好,都能夠較為準確地反映出艇體振動特性。
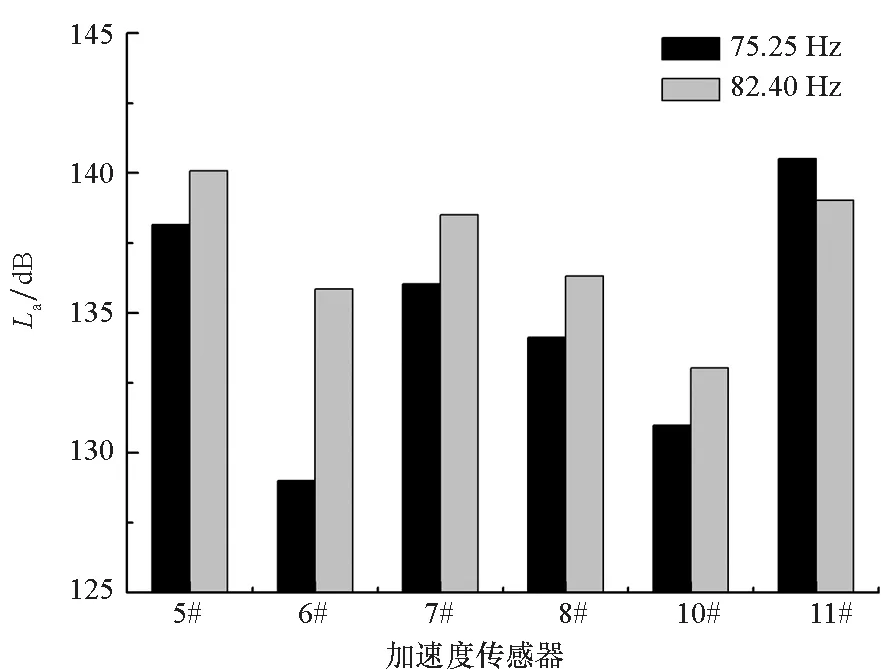
(a) 橫向(a) Lateral
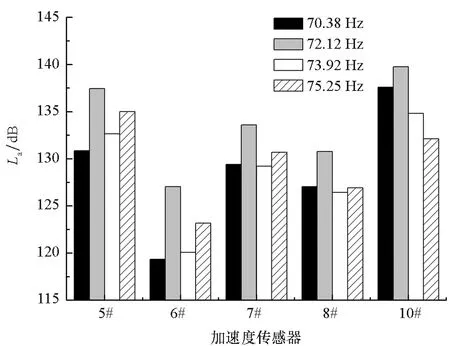
(b) 垂向(b) Vertical圖7 艇體在特定譜峰頻率處的振動加速度(E779A槳)Fig.7 Vibration acceleration of the hull at specific peak frequency(E779A propeller)
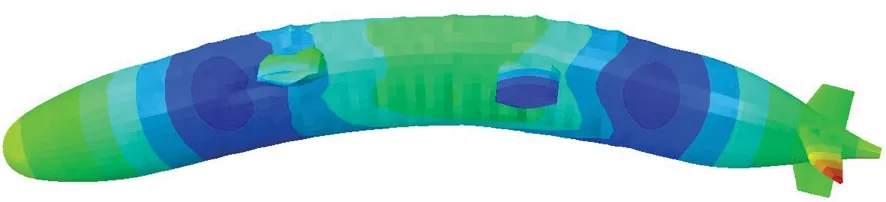
(a) 79.04 Hz
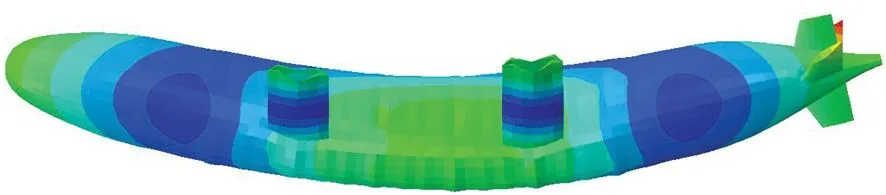
(b) 82.96 Hz
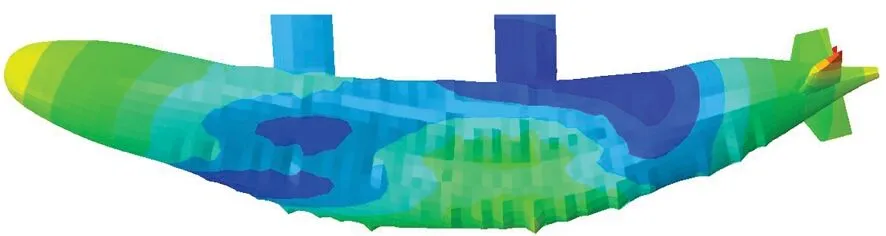
(c) 70.21 Hz
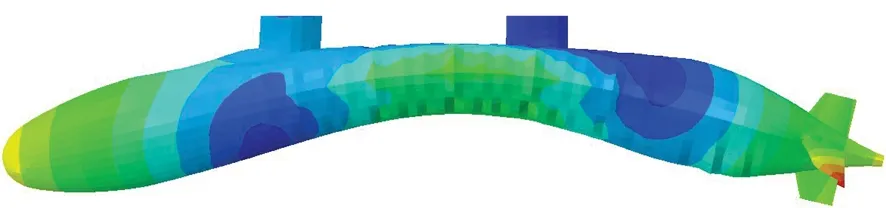
(d) 70.57 Hz
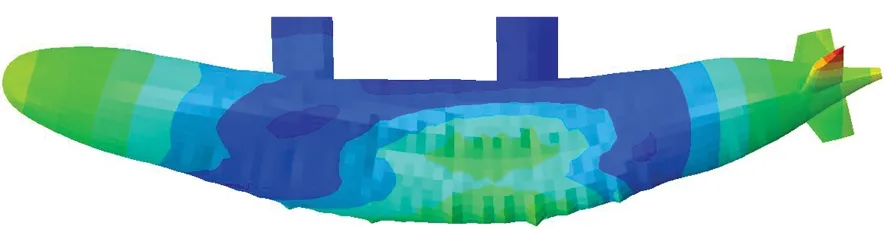
(e) 72.1 Hz
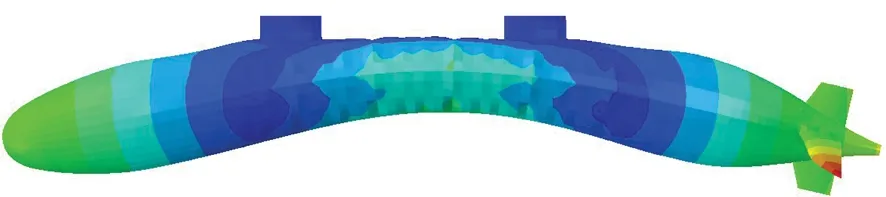
(f) 73.66 Hz圖8 有限元計算得到的艇體一階彎曲模態振型Fig.8 The 1st order bending mode of the hull calculated by finite element method
2 螺旋槳水動力性能及艇尾伴流場數值計算
2.1 計算模型與網格劃分
采用CFD方法對螺旋槳敞水性能和艇尾伴流場進行數值計算,并與文獻[7-9]中的試驗結果對比,以驗證本文計算方法的可靠性。計算模型的尺寸均與上述文獻中相同。
黏性流體計算基于對N-S方程的求解,螺旋槳流場為湍流流場,湍流模擬采用RANS方法。為求解湍流方程,需選擇合適的湍流模型以解決方程的封閉性問題,本文使用的湍流模型為剪切應力輸運(Shear-Stress Transport,SST)k-ω模型[10],該模型在近壁面區有較好的精度和算法穩定性。
螺旋槳敞水計算域采用結構化網格進行劃分,分為靜止域和旋轉域,均為圓柱體。靜止域前端位于槳盤面前2d處,設為速度入口;后端位于槳盤面后7d處,設為壓力出口;圓柱面直徑為10d,設為自由滑移壁面,網格數量約100萬。旋轉域直徑為1.2d,前后端各距槳盤面0.25d,E779A和4382兩槳網格數量分別約220萬、250萬,槳葉近壁面第一層網格厚度y+≤50。敞水計算域設置及網格劃分如圖9(a)~(c)所示。
艇尾伴流場計算對象為SUBOFF主體+圍殼+尾翼模型,計算域為圓柱體,采用結構化網格進行劃分,前端位于艇首前L處,后端位于艇尾后2L處,直徑為2L,邊界條件設置與前文靜止域類似,網格數量約300萬,艇體近壁面第一層網格厚度y+≤50。艇尾伴流場計算域設置及網格劃分如圖9(d)~(e)所示。
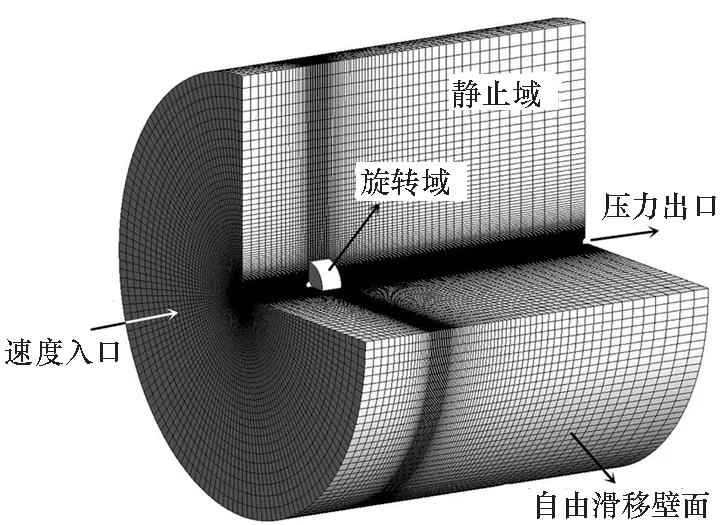
(a) 螺旋槳敞水計算域(a) Computational region of open water propeller
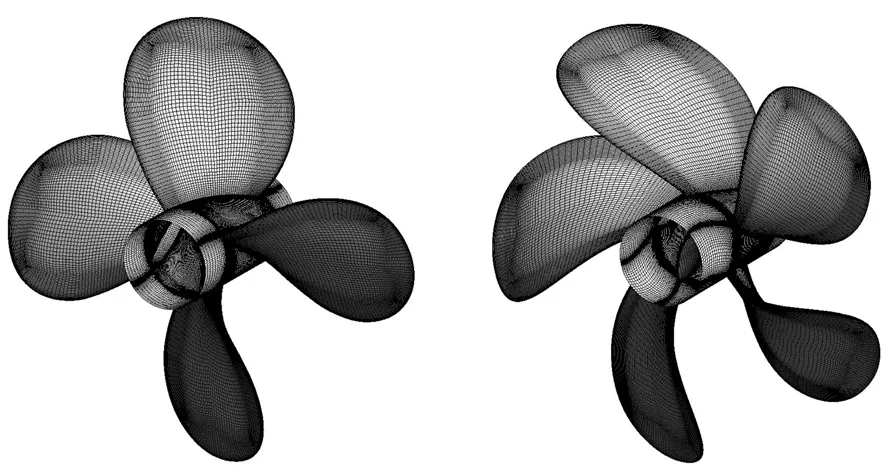
(b) E779A螺旋槳(b) E779A propeller (c) 4382螺旋槳(c) 4382 propeller
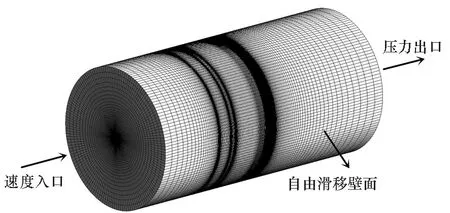
(d) SUBOFF伴流場計算域(d) Computational region of SUBOFF wake field

(e) SUBOFF艇體(e) SUBOFF hull圖9 計算域設置及網格劃分Fig.9 Computational region and grid
2.2 計算結果分析
使用成熟的CFD軟件CFX進行數值計算。將螺旋槳轉速設為10 r/s,采用多重參考系(Multiple Reference Frames, MRF)方法對一系列進速下的螺旋槳推力、轉矩進行定常計算,結果如圖10所示,其中J為進速系數,可見計算值與文獻[7-8]試驗值吻合較好,推力系數KT、轉矩系數KQ的相對誤差均小于5%。計算得到穩定的艇體伴流場后,取Re=1.2×107時,x/L=0.978,r/R=0.25處SUBOFF伴流的計算結果與文獻[9]中風洞尾流場測量試驗結果進行對比,如圖11所示,其中u、v、w分別為軸向、徑向、周向速度,U為來流速度,θ為周向角,可見計算值與試驗值吻合較好。螺旋槳水動力性能和艇體伴流場的準確計算保證了螺旋槳在艇體伴流場中非定常負載計算的可靠性。
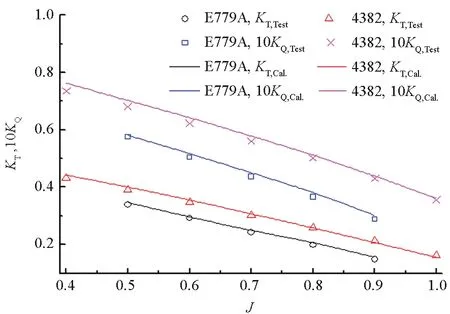
圖10 螺旋槳敞水性能計算值與試驗值的對比Fig.10 Comparison between numerical and experimental results of propeller open water performance
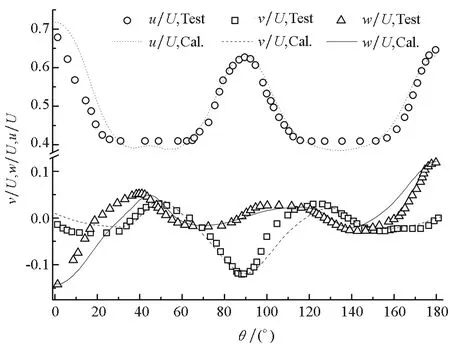
圖11 SUBOFF伴流場計算值與試驗值的對比Fig.11 Comparison between numerical and experimental results of SUBOFF wake field
3 艇后伴流場中螺旋槳激勵艇體振動響應數值計算
3.1 螺旋槳非定常負載計算
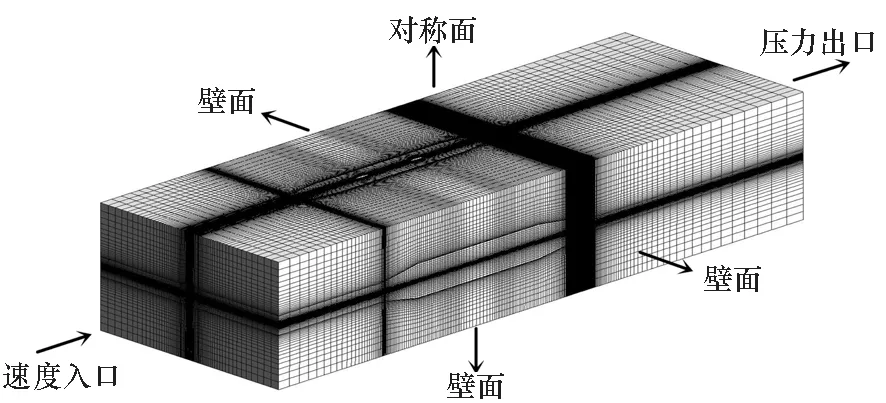
本文計算方法的可靠性經過驗證后,采用相同方法對工況2(V=1.5 m/s,n=12 r/s)下的艇后螺旋槳非定常負載進行計算。此時靜止域橫截面尺寸設為與循環水槽實際尺寸相同,其前端位于艇首前0.5L處,設為速度入口;后端位于艇尾后L處,設為壓力出口;上端面設為對稱面,其余邊界均設為壁面,靜止域網格數量約360萬,艇體近壁面第一層網格厚度y+≤50。旋轉域除修改槳轂形狀外其余設置基本不變。計算域設置及網格劃分如圖12所示。
(a) 計算域(a) Computational region
(b) 艇體及螺旋槳(b) Hull and propeller圖12 艇后螺旋槳計算域及網格劃分Fig.12 Computational region and grid of behind hull propeller
采用滑移網格方法計算艇后螺旋槳的非定常負載,時間步長取螺旋槳旋轉1(°)/步,結果收斂后,再計算1 s,將時域結果進行FFT后得到頻域幅值。螺旋槳推力T計算結果如圖13所示,圖中以BPF表示葉頻,以SF表示軸頻,可明顯看出兩槳葉頻及其諧頻的各階幅值,其中葉頻幅值最大;由于螺旋槳處于四周期伴流場中,四葉槳E779A對稱的兩片槳葉同時進入高或低伴流區,其推力幅值比五葉槳4382更大;同時受四周期伴流場影響,4382槳在4的整數倍軸頻處也可見較小的幅值。在240 Hz處,由于4382槳4階葉頻和20階軸頻兩種作用的疊加,此處幅值略大。
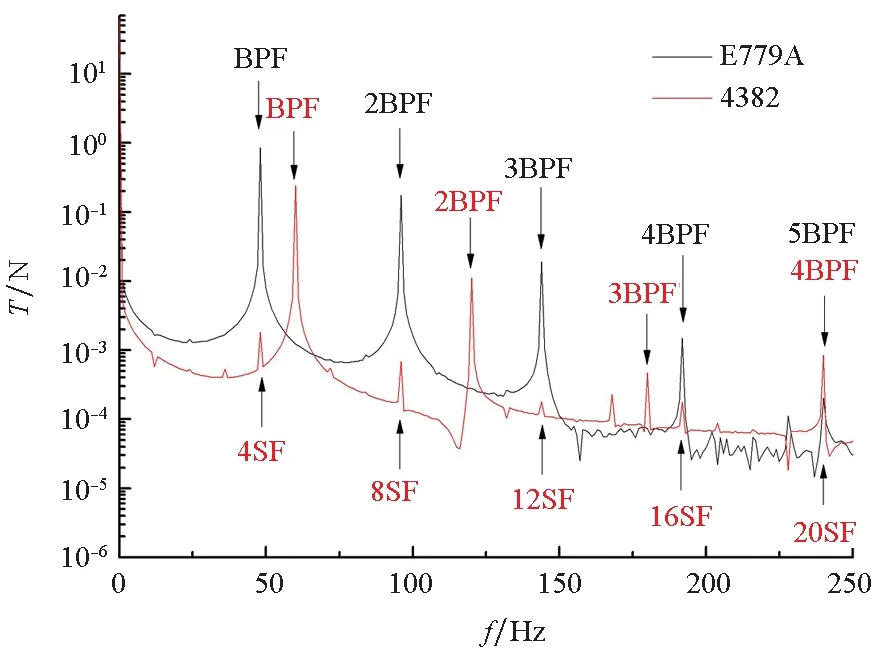
圖13 螺旋槳推力計算結果Fig.13 Numerical results of propeller thrust
3.2 艇體振動響應計算
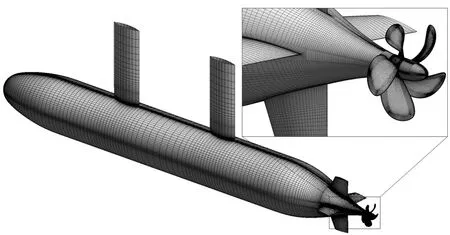
建立包括螺旋槳、軸系、艇體、支架的試驗裝置耦合系統整體有限元模型,采用添加附加流場的方式考慮水下艇體的流固耦合作用。其中軸系、骨架采用梁單元,單元數量約0.1萬;艇體殼板、劍桿、支架采用殼單元,單元數量約1.2萬;尾翼、艇內機械、附加流場采用實體單元,單元數量約3.7萬;螺旋槳、壓載等采用集中質量表示。有限元網格如圖14所示。
(a) 艇體及支架(a) Hull and support
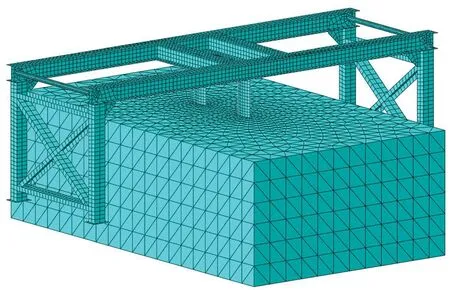
(b) 附加流場(b) Additional fluid field圖14 有限元網格Fig.14 Finite element mesh
首先計算得到耦合系統模態并與試驗數據進行對比,研究振動響應與測點位置之間的關系;然后采用模態疊加法[11]計算耦合系統在螺旋槳及電機等激勵作用下的強迫振動響應。將計算得到的螺旋槳三個方向的非定常力Fpx、Fpy、Fpz及非定常轉矩Mx、My、Mz加載于螺旋槳處;電機振動對試驗結果的影響較大,在計算時不能將其忽略,因此將測量得到的電機三個方向的激振力Fmx、Fmy、Fmz加載于電機處,如圖15所示。
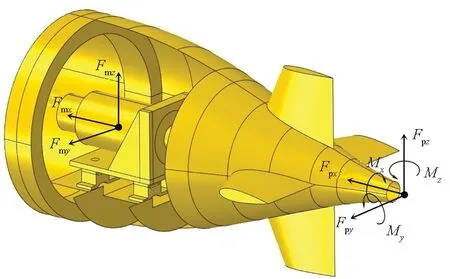
圖15 激振力的加載Fig.15 Loading of excitation force
3.3 計算結果分析
計算得到艇體振動響應后,取尾軸承處(11#)橫向振動響應的計算值與試驗值進行對比,如圖16所示。由于電機激振力在各階軸頻處均有峰值,振動響應中也能觀察到相應峰值,計算結果能夠捕捉到試驗結果頻譜中的大部分峰值。兩槳葉頻(E779A槳為48 Hz,4382槳為60 Hz)處振動響應對比如圖16(c)所示,可見計算值與試驗值吻合較好,圖中4382槳振動響應較E779A槳在48 Hz處較小而在60 Hz處較大,體現出兩槳在葉頻處的激勵作用。艇體振動能量大部分集中于譜峰頻率處,本文方法對此處振動響應的計算精度較高,說明該方法能夠較為準確地預報艇尾伴流場中螺旋槳激勵下艇體的振動響應,相比于采用單位簡諧激勵的諧響應分析方法更加接近水下艇體振動的真實情況。
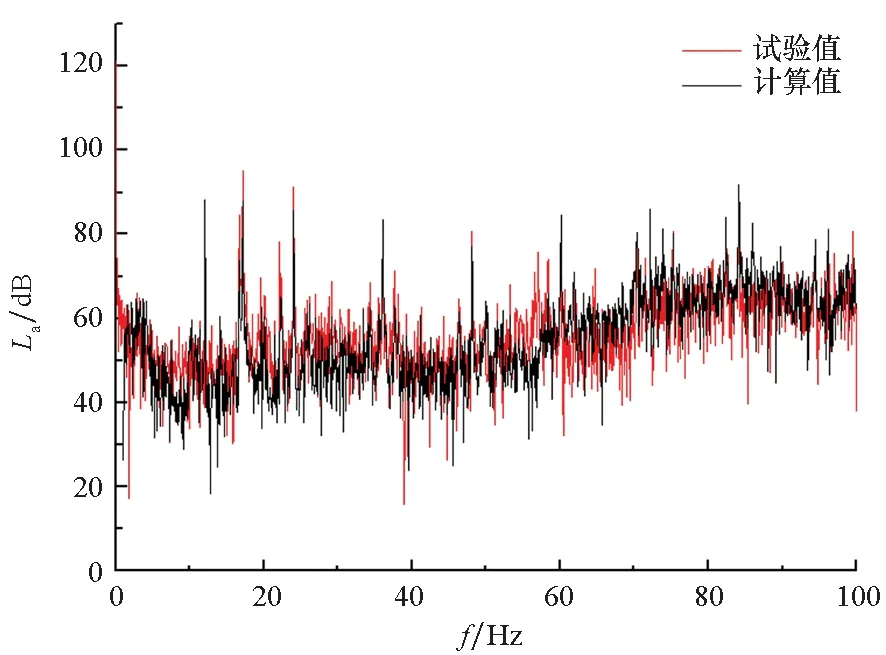
(a) E779A螺旋槳(a) E779A propeller
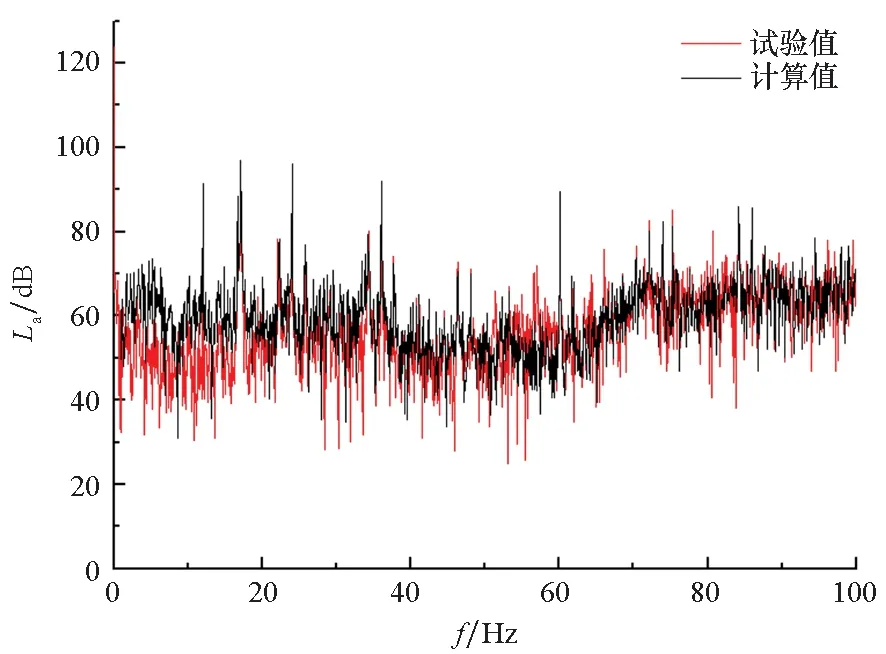
(b) 4382螺旋槳(b) 4382 propeller
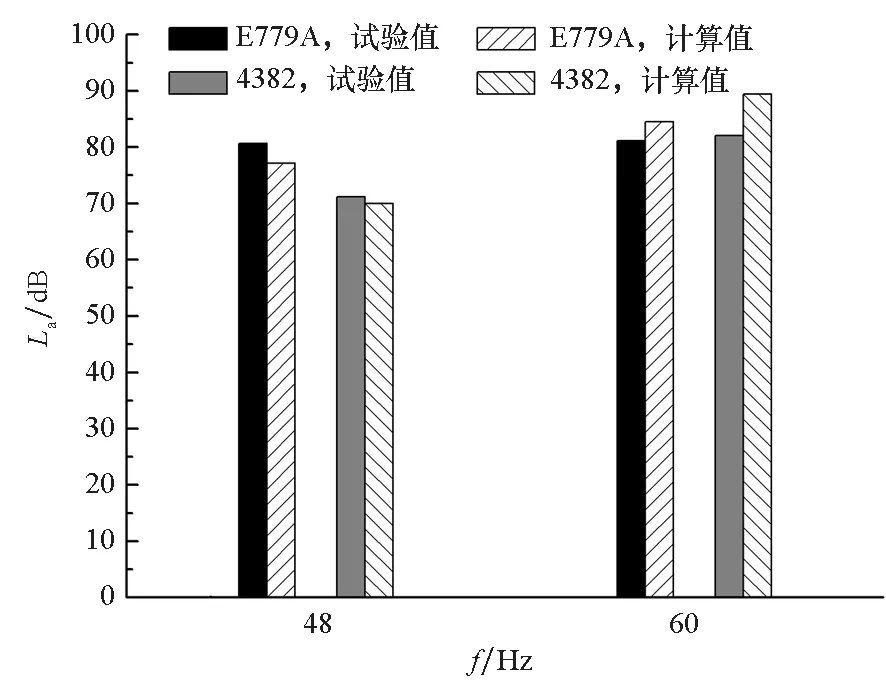
(c) 兩槳葉頻處振動響應對比(c) Comparison between vibration response of the two propellers at BPF圖16 尾軸承處振動響應計算值與試驗值的對比Fig.16 Comparison between numerical and experimental results of vibration response at stern bearing
4 結論
在循環水槽中開展了艇尾伴流場中螺旋槳誘導艇尾脈動壓力及螺旋槳激勵水下艇體振動響應的測量試驗,綜合采用CFD方法、有限元和模態疊加法建立了螺旋槳激勵水下艇體振動響應的數值計算方法,并將計算與試驗結果進行對比分析,得到如下結論:
1)螺旋槳誘導艇尾脈動壓力幅值在葉頻處最大,且隨螺旋槳負載增加而增大,隨與螺旋槳距離增大而減小,四葉槳脈動壓力在尾翼后的高伴流區幅值較大,五葉槳則在尾翼之間的低伴流區幅值較大。
2)大部分測點的振動響應隨螺旋槳負載增加而增大,受模型本身的復雜振動特性以及電機和環境振動等干擾因素的影響,部分測點葉頻處幅值比軸頻、2階葉頻處更小,且少數測點的振動響應并未隨螺旋槳負載增加而增大。五葉槳激勵引起的側向振動較四葉槳有所增強,而軸向振動則有所減弱。
3)特定頻率處的側向振動響應在艇首、中、尾部較大,在劍桿處較小,呈一階彎曲振型,且頻率范圍與有限元計算結果較為一致,試驗與計算結果吻合較好,都能夠較為準確地反映出艇體振動特性。
4)本文采用了更能反映螺旋槳真實激勵特性的激勵源,相比于采用單位簡諧激勵的諧響應分析方法更加接近水下艇體振動的真實情況,振動響應計算值與試驗值吻合較好,尤其是能夠捕捉到頻譜中的大部分峰值,說明本文方法能夠較為準確地預報艇尾伴流場中螺旋槳激勵水下艇體的振動響應,可為相關研究提供參考,有助于實現水下艇體的減振降噪。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00