一起前緣襟翼自檢故障分析
2020-12-08 07:57:56齊鵬王瑋
軍民兩用技術與產品 2020年10期
齊 鵬 王 瑋
(國營蕪湖機械廠,蕪湖 241007)
電傳控制系統是飛機飛行的主要控制系統,用于控制飛機俯仰、傾斜和航向3個方向的姿態與角速度,實現對飛機在空中6個自由度的控制,保證飛機具有良好的穩定性和機動性。為了確保飛行員能夠更好地駕駛飛機,設計人員通過加裝機翼前緣襟翼來提高飛機的大迎角穩定性和飛機升力。前緣襟翼布置在飛機左右兩側機翼前緣,在飛機起飛、著陸階段會放下,以增大機翼彎度、提高飛機升力,便于飛機的起飛與著陸。在空中飛行階段,前緣襟翼隨迎角自動偏轉,升力不足時飛機迎角會變大,前緣襟翼隨之放下角度增大,為飛機提供升力;升力足夠時飛機迎角會變小,前緣襟翼隨之放下角度減小,為飛機減小阻力。
為檢查飛機前緣襟翼工作情況,設計人員通常會加裝專用自檢電路,以保證當前緣襟翼控制系統故障時能夠正常切換到應急備份狀態工作,以及為飛行員提供報警信號。
1 故障現象及原理分析
飛機維修人員在對某架飛機的飛機電傳控制系統進行工作性能檢查時發現,當檢查“檢測設備和信號器的良好性”工作第十一步時,向上按壓S1開關,發出模擬前緣襟翼故障信號,綜合告警設備上并沒有按慣例報出“前緣襟翼自動故障”。而是有時能夠報出“前緣襟翼自動故障”,有時不報,工作狀態不穩定。
為了排查該問題,需要從前緣襟翼工作原理上進行分析,包括前緣襟翼自動工作原理和前緣襟翼自檢工作原理,其中前緣襟翼自檢是飛機電傳控制系統自檢中的部分內容。前緣襟翼自動工作時,前緣襟翼隨迎角自動偏轉。自檢時前緣襟翼處于自動工作狀態,當前緣襟翼自動工作異常時,可能導致該問題發生。前緣襟翼自檢電路用于發送模擬故障信號,當模擬故障信號不穩定時,也可能導致該問題發生。下面將對這3個部分的工作原理進行分別介紹。
1.1 前緣襟翼自動工作原理
前緣襟翼自動狀態是其主要工作狀態,在自動狀態即“收上、自動、放下”三位置轉換開關放在“自動”時,前緣襟翼跟隨迎角自動偏轉,偏轉控制律由控制計算機電路板進行解算,解算數據發送到舵機PM-190用于偏轉前緣襟翼舵面。“前襟自動”是指前緣襟翼保持在“自動”的工作狀態,同時需滿足以下3個條件:一是三位置轉換開關在“自動”位置;二是動壓q和馬赫數Ma均小于給定值q給定值和Ma給定值;三是前緣襟翼控制計算機和前緣襟翼舵機無故障。
在電傳控制計算機內,前緣襟翼控制計算機電路板上有2個相同的計算通道,用于進行數據解算和故障監控。這2個通道分別對來自3通道和4通道的迎角信號(α3、α4)進行前緣襟翼控制律的計算,其中,一個通道利用真實解算數據來控制舵機伺服閥,另一個通道用數字舵機模型進行解算。2個通道輸出的數據進入比較監控器進行比較,當差值超過報故門限值時即判定故障,斷開舵機中的主電磁閥。前緣襟翼故障監控原理流程如圖1所示。
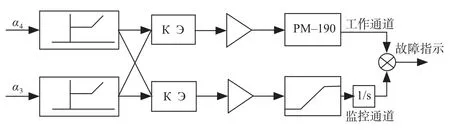
圖1 前緣襟翼故障監控圖
前緣襟翼舵機電氣組成如圖2所示。主電磁閥用于控制前緣襟翼第二液壓系統的接入,當前緣襟翼計算機故障時斷開主電磁閥供電。
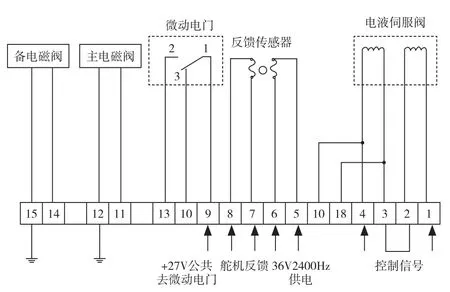
圖2 前緣襟翼舵機電氣原理圖
1.2 前緣襟翼自檢原理
前緣襟翼自檢工作是利用檢查控制盒施加一個激勵信號到前緣襟翼工作通道中,測試前緣襟翼故障監控模塊能否正常表示故障,前緣襟翼控制計算機電路板邏輯功能是否正常,以及前緣襟翼故障信號顯示的良好性。
前緣襟翼自檢是電傳控制系統自檢的部分內容。電傳控制系統利用檢查控制盒進行自檢,檢查控制盒上有供電開關S2,測試信號發送開關S1和波段開關S3,波段開關S3具有0~17位置,分別對應不同的測試信號。當S3在11位置檢查時能夠發送測試信號到前緣襟翼控制計算機電路板,進行前緣襟翼自檢工作。
前緣襟翼自檢過程如下:當接通電傳檢查控制盒供電開關S2及波段開關S3在11位置時,向上按壓測試信號發送開關S1,測試信號進入前緣襟翼控制計算機電路板疊加控制信號后形成測試綜合信號,如圖3所示。測試綜合信號通過電路邏輯切斷A20點的27V信號,使前緣襟翼主電磁閥斷電。主電磁閥斷電后舵機不再響應控制指令,前緣襟翼工作通道與監控通道輸出數據不同步進而表決故障,通過綜合告警設備上報“前緣襟翼自動”。
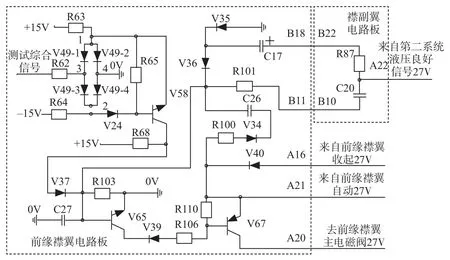
圖3 前緣襟翼自檢原理
2 故障分析定位
針對綜合告警設備上有時無法報出“前緣襟翼自動故障”這一問題,維修人員對前緣襟翼工作涉及的相關產品進行逐項排查,產品排查無誤后,采取了對前緣襟翼控制信號進行監控查找的方法,最終確定了故障原因,排除了故障。
2.1 初步排查
根據前緣襟翼的工作原理進行分析,維修人員認定此次故障應從以下4個方面開展排查工作。一是檢查前緣襟翼工作邏輯是否正常;二是更換前緣襟翼控制計算機電路板,檢查是否為前緣襟翼控制計算機電路板故障;三是更換前緣襟翼電路板所在的電傳計算機、臺架CT-5、電傳控制盒、前襟舵機等產品,排除其相關產品故障引起前緣襟翼工作故障的可能性;四是檢查相關線路確認各相關信號是否良好。
維修人員對上述4個方面進行逐項排查,但均未發現問題,而故障現象一直未發生變化。
2.2 故障信號測量排查
維修人員通過前述更換板件、產品等工作,懷疑故障原因是信號干擾。為準確判斷故障原因,維修人員通過轉接設備將前緣襟翼電路板引出至產品外,然后測量不同工作狀態下前緣襟翼電路板各針腳電壓參數,發現故障時A20點存在3V電壓,良好時該處電壓小于1V。經了解,前緣襟翼主電磁閥的工作電壓為27V,但實際在1V以下才能穩定斷開,因此,故障原因應為此處多余的3V電壓,導致主電磁閥不能正確斷開,使得“前襟自動故障”無法發出。
經進一步檢查測量發現,圖3中前緣襟翼電路板中R101電阻右側的11腳存在約0.6V的干擾信號,導致V65接通,使得A20點產生電壓。通過前述試驗,分析出11腳的干擾信號可能來自襟副翼電路板A22腳,A22腳是第二液壓系統液壓良好27V信號線路。飛機設計有2套液壓系統作為動力源,前緣襟翼自動工作狀態時舵機由第二液壓系統提供液壓壓力驅動。第二液壓系統液壓良好信號工作原理,如圖4所示。
如圖4所示,襟副翼電路板A22腳信號由電傳4通道電源提供27V直流供電,通過2號飛機系統繼電器盒內的觸點接通或斷開。
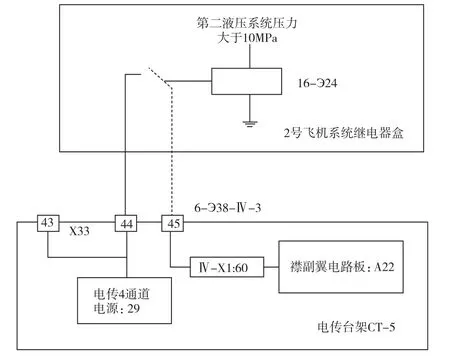
圖4 第二液壓系統液壓良好信號原理圖
斷開2號飛機系統繼電器盒插頭,再次檢查故障是否消失。確認該故障原因為“第二液壓系統液壓良好信號”存在干擾信號。為查找故障點,維修人員使用示波器在計算機面板上的X33:43點檢查該信號,發現明顯存在單邊峰值約1.5V/14kHz的交流分量。
根據圖4可知,交流分量干擾信號進入襟副翼電路板A22腳,根據圖3可知,該交流分量信號到達襟副翼電路板的C20電容,因電容具有阻直流電流、通交流電流的特性,使得交流分量干擾信號無法被隔絕。該交流分量信號進入前緣襟翼控制計算機電路板的11腳,進而產生干擾。
根據上述分析排查可以確定,前緣襟翼控制計算機電路板的干擾信號來自于第二液壓系統液壓良好27V信號線路,該干擾信號由電傳4通道電源發出,電傳4通道電源由機上27V供電提供,機上27V供電由地面電源車提供的115V交流供電經過變壓和二極管整流后得到。
2.3 故障定位
經排查,更換地面電源車后故障現象消失,更換后的“第二液壓系統液壓良好信號”交流分量峰值明顯降低到1V以內。更換電源車前后的液壓系統信號圖如圖5所示。

圖5 液壓系統信號圖
2.4 故障原因認定
用電壓示波器測量故障電源車電壓,發現存在單邊峰值約為15V/10kHz的正弦分量,正常電源車電壓波形圖則明顯好很多,如圖6所示。
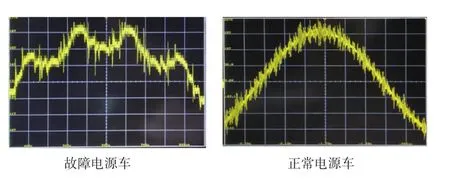
圖6 電源車電壓
綜上所述,該故障由地面電源車存在單邊峰值為15V/10kHz的正弦分量波動所造成。維修人員聯系電源車廠家進行現場檢查時發現,該電源車為三相四線星形連接方式,其中心線未接接地放電電容。
3 結 論
結合以上分析,該故障是由于地面電源車存在設計缺陷,使得其干擾信號通過中心線進入飛機,經過各級變壓、整流后殘存在直流27V中的交流分量,引起三極管截止不徹底。
隨著裝備使用年限的增加,其抗干擾性能逐步下降,配套設備性能也會發生變化,配套使用正常的設備也會逐漸暴露出各種問題。配套設備設施、供電甚至是環境溫濕度都有可能導致故障發生,設備維護人員需指定一個裝備檢查與固定維護周期,以延長設備使用壽命。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
當代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
