基于微功率無線的三相同步錄波技術方案及其低功耗設計
2020-12-09 05:08:42李紹文
浙江電力 2020年11期
李紹文,許 健
(1.長沙醫學院 信息工程學院,長沙 410083;2.威勝信息技術股份有限公司,長沙 410083)
0 引言
10 kV 配電網故障錄波功能已經成為配電網系統短路、接地故障等過程分析的關鍵手段之一[1-3]。暫態錄波型故障指示器作為故障定位有效的輔助手段,越來越為國家電網有限公司所認可。但仍受制于低功耗[4-7]、取電能力[8-10]和三相同步錄波[11-12]等關鍵技術的發展水平,其中三相同步錄波技術是核心技術之一,其精度直接影響零序合成的精度,最終影響故障分析的結果。考慮到10 kV 配電網的安全性,基于微功率無線的三相同步錄波技術適合應用在暫態錄波型故障指示器中。目前,故障同步錄波主要有2 種方案。一種是基于高精度授時模塊和高精度守時晶振的同步錄波方案[13-14],該方案采用高精度GPS 模塊給控制芯片提供絕對時間信息,并根據這個同步的絕對時間信息來控制交流采樣。該方案實現成本高,且難以實現低功耗設計。另一種是通過授時協議的同步錄波方案[15-18],該方案通過協議計算各種延時來實現絕對時間同步,進而控制交流采樣。該方案過度依賴通信,軟件處理邏輯相對復雜。以上2 種方案都是根據絕對的時間信息對采樣點計數進行清零處理,并通過高精度的守時晶振來保證對時后的采樣同步的。本文設計了一種基于微功率無線的低功耗三相同步錄波技術方案,通過對比相鄰2 次對時之間的采樣位置信息,計算出B 相、C 相相對于A 相的采樣計數偏移,并逐步微調B 相、C 相的采樣間隔來同步于A 相采樣,最終實現了A,B,C 三相同步錄波。
1 基于微功率無線的三相同步錄波技術方案
1.1 具體方案
如圖1 所示,在終端無線對時后,A,B,C三相各自保存當前采樣點位置信息。在實際開發過程中,以芯片外設RTC(實時時鐘)來控制ADC(模擬數字轉換器)采樣周期,故采樣點位置信息由采樣點當前計數值和對應時刻RTC 計數寄存器計數值2 部分組成。以32.768 kHz 晶振為例,一個RTC 計數寄存器的最小時間單元TickRTC為30.52 μs,若采樣點間隔為244.16 μs(8×30.52 μs),以A 相為例,其位置信息計算為:
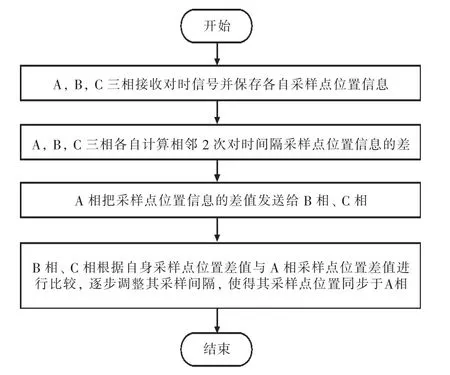
圖1 總體技術方案流程

式中: A(N)為A 相位置信息;CNTRTC_Tick為RTC計數寄存器的計數值;CNTADC為ADC 的采樣點計數值。B 相、C 相位置信息計算同理。在A 相計算采樣點位置信息后,周期性計算相鄰2 次對時的采樣點位置信息差值:

B 相、C 相位置信息差值的計算同理。在A相獲得采樣點位置信息差值后,通過無線把采樣點位置信息差值A(N)Diff發送給B 相、C 相。在B相接收到A 相的采樣點位置信息差值后,同時計算B 相采樣點位置信息差值相對于A 相采樣點位置信息差值的初始偏移:

如圖2 所示,在B(N)與B(N+1)之間,要使得B 相采樣點位置與A 相的采樣點位置逐步同步,則需要連續調整BA(N)Diff/TickRTC個采樣點,直到B(N)在時間軸上逐步逼近A(N)。C 相處理方式與B 相一致。一般情況下,在對時周期為5 s的間隔內,由于晶振頻偏的存在,B 相采樣點位置距離A 相同一采樣點位置最大偏移不會超過一個采樣點間隔,即244.16 μs,那么其最大調整次數不會超過8 次,所需要的同步收斂時間小于2 ms(8×244.14 μs)。

圖2 B 相采樣點調整時序
A,B,C 三相接收到無線對時后,以A 相采樣點位置為對比,B 相、C 相通過對比計算相鄰2 次對時周期的采樣位置信息偏差,獲得初始的同步偏移值,并通過逐步調整自己的采樣點間隔,在采樣時間軸上逐步逼近A 相,使其同步于A 相。從軟件實現上來看,B 相、C 相處理邏輯和A 相處理邏輯不一致,軟件設計相對復雜,無線通信次數也相應增加。但是,以RTC 最小時間單元作為調整時間單元,采用逐步逼近的調整方式,其三相錄波同步精度高。
1.2 方案同步性能影響因素
(1)晶振頻率。以晶振頻率32.768 kHz 為例,其RTC 計數寄存器的最小時間單元為30.52 μs,以此晶振作為RTC 時鐘來源來控制ADC 觸發周期。由此可知,在同步調整的過程中,其最小同步調整間隔為30.52 μs。從軟件處理邏輯上考慮,理論上能達到的最高同步處理精度為61.04 μs(2個最小同步調整間隔)。可見,晶振頻率越高,其同步調整的精度越高,三相同步誤差就越小;但當晶振頻率達到一定極限值時,其最終同步效果會受到軟件處理耗時及硬件響應的限制。
(2)晶振頻偏。在三相完全同步后,隨著時間的推移,因晶振頻偏的存在,其三相采樣點的同步性變差。可見,晶振頻偏的大小是影響三相同步的關鍵因素之一。晶振頻偏越小,其三相采樣同步性就保持得越好,所需要的終端對時間隔也就越大。
(3)前端采樣硬件回路的相移。通常前端采樣硬件回路通過互感器把線上電流轉化成二次電流,并經由轉化電路將電信號送到芯片采樣端口進行采樣。A,B,C 三相同時采集同一個硬件信號,用示波器觀察其芯片采樣端口的波形,發現不同相的采樣波形依然存在同步誤差。可見,該同步誤差由硬件設計本身引起,后續的軟件同步機制無法消除該同步誤差,故在硬件設計上應嚴格把關,以避免前端采樣硬件回路的相移。
(4)無線通信延時。由于硬件的差異,同一終端對時信號到達A,B,C 三相裝置的時間不同。由于同一硬件對于相鄰2 次對時信號的延時是一致的,以相鄰2 次對時的采樣位置信息差值作為同步調整的基礎數據,可避免不同硬件對通信延時的影響。
(5)同頻干擾。無線電信號在傳輸過程中會與另一相同或相近頻率無線電信號相互干擾,致使信號畸變,進而導致接收端無法有效解析該電信號,最終導致同步失敗。某一空間內同頻信號越多,其三相同步失敗的可能性就越大。目前,一般是通過跳頻或錯頻的方式來解決同頻干擾的問題。
(6)無線對時間隔。因晶振頻偏的存在,隨著時間的推移,其三相采樣點的同步性變差,這就需要對A,B,C 三相實施周期性的無線對時。終端無線對時間隔越大,其最大同步誤差也就越大。但無線對時的間隔需要綜合考慮晶振頻偏和功耗的影響。晶振頻偏小,則可以適量加大無線對時間隔,從而達到降低裝置功耗的目的。
綜上所述,晶振頻率與頻偏、前端采樣硬件回路的相移、同頻干擾和無線對時間隔是影響三相錄波同步性能的主要因素。對于單次的對時同步失敗,根據同步調整機制,其同步采樣點計數不會發生突變,其三相同步性誤差也是一個漸變的過程。若對時間隔相對較小,在對時失敗的情況下,其整體的三相同步性能仍然較好。可見,該方案對時同步失敗的冗余度較好。
1.3 改善前的同步方案
如圖3 所示,該方案由終端發起對時信號,A,B,C 三相在接收到無線對時信號后,對其采樣點計數清零處理。若忽略三相各自接收到無線信號的延時,三相接收終端無線對時后,其對時后端采樣點計數在時間上完全保持一致,達到了三相同步的目的。在終端對時時刻前端,假設A相處在N 計數采樣點,由于晶振頻偏的存在,B相可能處在N-1 計數采樣點,當對時成功后,A相、B 相采樣點計數均清零,重新開始計數,實現了對時后端的同步。但是,在對時時刻前端,B相就會缺少一個N 計數采樣點,這樣B 相就存在一個采樣點間隔的同步誤差,若采樣點間隔為250 μs,則最大同步誤差就會達到250 μs;若其中某一相對時失敗,其采樣點則完全失去同步。從軟件實現上來看,該同步方案的A,B,C 三相處理邏輯一致,軟件處理邏輯相對比較簡單,但存在三相同步性差或完全失去同步的風險。
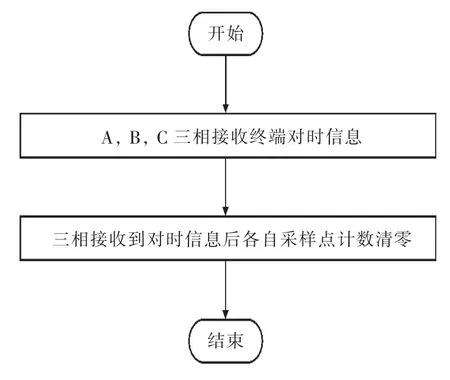
圖3 改善前的同步方案流程
2 低功耗設計
在三相同步對時過程中,一方面要提高無線通信的成功率,另一方面要盡可能在無線通信方面降低其功耗。基于此,本文設計了一種低功耗的無線通信機制。
通常接收端無線通信模塊有3 種工作模式,即接收模式、發送模式和休眠模式。若一直處在接收模式下,其功耗遠高于休眠模式。為降低接收端的功耗,采用周期性喚醒的通信模式,如圖4 所示。
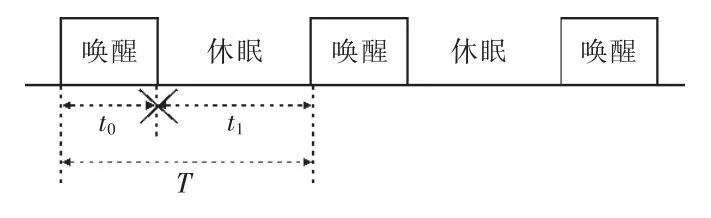
圖4 接收端通信時序
為了保證通信的成功率,發送端在發送對時信號前會有一定數量的廣播喚醒幀信號,以確保喚醒接收端,進而讓接收端能夠及時接收到對時幀信號。發送端通信時序如圖5 所示,其中t2為喚醒幀信號發送間隔。為保證接收端能被穩定喚醒,則需滿足如下條件:

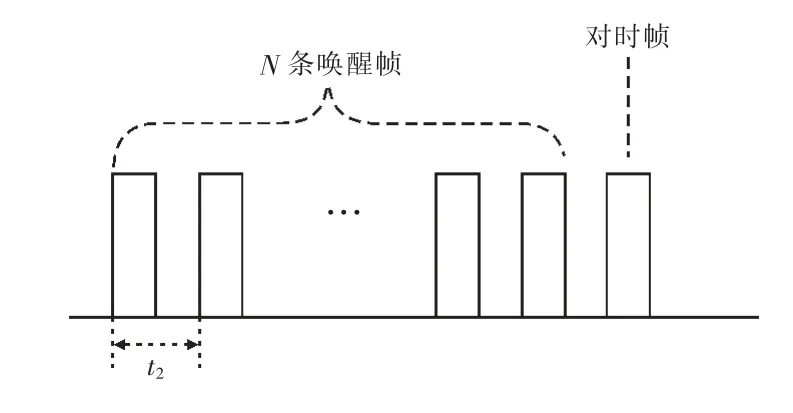
圖5 發送端通信時序
即任意時刻的一次對時操作,發送端的喚醒幀能夠超過接收端的休眠區間,到達接收端的喚醒區間,且能在接收端喚醒區間執行2 次以上。
3 測試與驗證
采用晶振頻率為32.768 kHz、晶振頻偏為±2×10-5、RTC 觸發采樣、采樣間隔為244.14 μs、對終端對時間隔5 s、排除前端采樣硬件回路的相移影響,在暫態錄波型故障指示器上應用三相同步錄波技術,其裝置線上測試如圖6 所示。A,B,C 三相線上電流輸出設置為10 A,相位差依次設置為120°,暫態錄波型故障指示器對線上電流進行100 次錄波,其單次錄波如圖7 所示,三相同步錄波精度數據如表1 所示。統計100 次錄波數據,發現其三相同步精度均在1.10°(對應61.04 μs)以內,與理論設計相符。表2 中給出了改進前的A,B,C 三相同步錄波精度,其最大同步精度達到了4.450°,無法滿足國家電網有限公司對三相同步的指標要求。

圖6 裝置線上測試圖
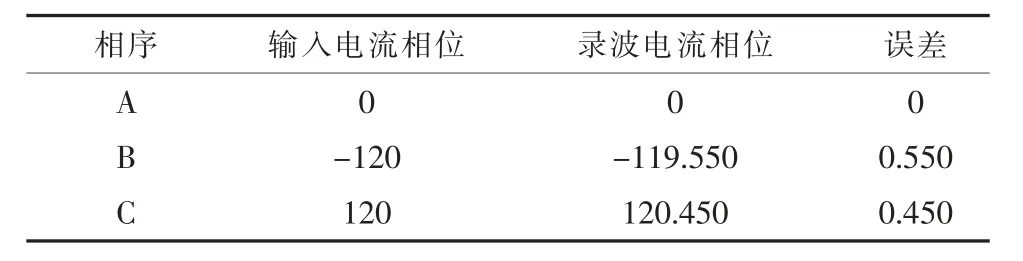
表1 A,B,C 三相同錄波精度(°)

表2 改進前的A,B,C 三相同錄波精度(°)
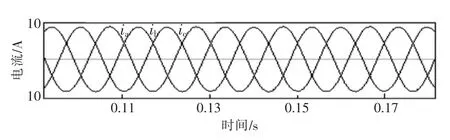
圖7 暫態錄波型故障指示器錄取A,B,C 三相波形
圖8 為暫態錄波型故障指示器靜態功耗測試圖。測試結果顯示,其平均靜態功耗約為56 μA,滿足國家電網有限公司企標要求。

圖8 暫態錄波型故障指示器靜態功耗測試圖
4 結語
本文針對目前三相同步錄波成本高、精度差的現狀,提出了一種基于微功率無線的三相同步錄波方案,分析了三相同步精度的影響因素,并給出了低功耗的無線通信機制。通過在暫態錄波型故障指示器上的大批量應用及測試,驗證了該方案的可行性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32