基于Simulink的三連桿機械臂控制器參數(shù)化算法
2020-12-10 07:20:46
工業(yè)加熱 2020年11期
(西安航空職業(yè)技術(shù)學(xué)院,陜西 西安 710089)
現(xiàn)階段,馬寶離與霍偉等人對雙臂空間機器人抓無系統(tǒng)動力學(xué)及其控制進行了深入探究;陳安軍等人詳細分析了平面雙連桿機構(gòu)機械臂動力學(xué)建模與運動學(xué)分析相關(guān)問題;肖濤與黃強等人深層研究了給定手作業(yè)軌跡的仿人機器人推操作;Mettin U, Hera P L, Freidovich L等人明確指出了基于虛擬約束的控制策略機器人運動軌跡,尤其是三連桿機械臂軌跡跟蹤控制設(shè)計層面,因為模型復(fù)雜性,導(dǎo)致反饋增益求取難度明顯增大。謝俊,匡俐輝等人構(gòu)建了新型串聯(lián)中醫(yī)推拿機械臂模型,并進行了運動學(xué)與動力學(xué)分析,同時基于Adams做了速度與加速度仿真。盡管當前三連桿機械臂研究在不斷深入,且獲得一定成果,但是針對控制器的參數(shù)化設(shè)計方式相對繁雜,控制器結(jié)構(gòu)非常復(fù)雜[1]。因此本文面向三連桿機械臂進行了控制器設(shè)計與直接參數(shù)化算法研究,基于三連桿機械臂控制器設(shè)計,明確指出簡潔的、優(yōu)化的直接參數(shù)化方法,不僅實現(xiàn)了機械臂動力閉環(huán)系統(tǒng)特征結(jié)構(gòu)優(yōu)化配置,還獲得所需特征結(jié)構(gòu),在很大程度上改善了系統(tǒng)整體性能。
1 三連桿機械臂模型分析
就連桿i(1,2,3)而言,mi代表連桿質(zhì)量;Li代表長度;Lei代表連桿從前關(guān)節(jié)與中心的具體間距;Ji代表慣性力矩,連桿慣性力矩通過其中心軸與XY相垂直的平面;βi代表連桿與Y軸正半軸向之間的測量角。三連桿機械臂模型[2]示意圖具體如圖1所示。
為便于計算分析,以此進行明確標記[3],即
(1)
機械手的運動方程,如式(2)所示:
W(β)β″+V(β,β′)β′+M(β)=Sτ
(2)
式中:τ為控制力矩向量。

圖1 三連桿機械臂
基于三連桿機械臂動態(tài)化方程,選擇直接參數(shù)化算法,通過特征結(jié)構(gòu)進行機械臂運動轉(zhuǎn)移于直立平衡點的控制規(guī)律進行優(yōu)化配置設(shè)計,從而保障三連桿機械臂控制的穩(wěn)定性與可靠性[4]。
面向三連桿機械臂運動要求為閉環(huán)系統(tǒng)穩(wěn)定安全,促使機械臂保持于穩(wěn)定狀態(tài),順利轉(zhuǎn)移到直立平衡點,即
β=0,β′=0
(3)
就機械手運動方程為載體,合理設(shè)計包含兩個重要組成部分的機械臂控制器[5]。即
τ=τe+τf
(4)
τe負責補償系統(tǒng)的M(β),即
τe=S-1M(β)
(5)
τf為狀態(tài)反饋控制規(guī)律,即
(6)
式中:T0(β,β′)與T1(β,β′)為反饋增益;υ為外部輸入信號,一般情況下,在仿真驗證時會直接忽視。
將機械臂控制器帶入機械手運動方程,可獲得閉環(huán)系統(tǒng),即
W(β)β″+[V(β,β′)-ST1(β,β′)]β′-ST0(β,β′)β=Sυ
(7)
2 反饋控制律問題求解
針對反饋控制律問題設(shè)計求解,以促使閉環(huán)系統(tǒng)成為具備所期望線性系統(tǒng)的特征結(jié)構(gòu)。在具體問題中,W(β)行列式值并非為0。設(shè)定:
(8)
那么閉環(huán)系統(tǒng)公式可以轉(zhuǎn)變?yōu)橐浑A模式,即
γ′=Ue(β,β′)γ+Se(β,β′)υ
(9)
式中:
(10)
(11)
所以,促使Ue(β,β′)與任何給定相同維度常數(shù)矩陣相類似。
具體求解問題可明確描述為此形式,即:問題TLR,給定機械手運動方程,任何選擇矩陣集F∈R2n×2n,發(fā)現(xiàn)常數(shù)非奇異矩陣集N∈R2n×2n與反饋增益矩陣T0(β,β′)、T1(β,β′),n代表矩陣維數(shù),以滿足相關(guān)條件,即
N-1Ue(β,β′)N=F
(12)
所以,閉環(huán)系統(tǒng)矩陣,即
Ue(β,β′)=NFN-1
(13)
而常數(shù)矩陣明確定義為
(14)
后續(xù)問題即如何求取相關(guān)參數(shù),以促使問題得以圓滿解決[6]。
3 直接參數(shù)化算法設(shè)計
就參數(shù)矩陣集選取約束條件與方式方法,其中包含Zariski開集定義,基于相關(guān)定理,可給定三連桿機械臂機械手運動方程直接參數(shù)化算法具體流程[7]。
首先,矩陣集F結(jié)構(gòu)。所謂矩陣集F一般代表Jordan形或?qū)切巍楸U掀錇镠urwitz矩陣,要求特征值都保持在復(fù)平面左半部分,則
λi(F)∈C-,i=1,2,3…,6
(15)
在遇到特殊情況時,矩陣集F可根據(jù)具體情況具體明確,在控制器仿真驗證時,選擇相對簡單的Hurwitz矩陣。
其次,最優(yōu)化問題。就系統(tǒng)相關(guān)標準要求,構(gòu)建性能指標,即
J=J(F,Z)
(16)
其中,主要關(guān)于F與Z標量函數(shù),以此構(gòu)成以下最優(yōu)化問題,即

(17)
但是在大多數(shù)具體問題中,因為幾乎任意矩陣Z都能夠滿足相關(guān)要求,因此約束條件一般都會被忽視。
再次,選取所需參數(shù)。通過性能最優(yōu)化算法,計算選擇最優(yōu)或者次級優(yōu)化參數(shù)矩陣集。在仿真驗證過程中,通過前兩個步驟引理可知,最優(yōu)化問題可直接忽略。
然后,控制器反饋增益計算分析。對反饋增益參數(shù)化表達式進行計算分析,特殊狀況下,通過獲得閉環(huán)特征向量矩陣N,那么閉環(huán)系統(tǒng)矩陣可通過Ue=NFN-1計算獲取。
最后,仿真驗證。基于數(shù)值仿真進行直接參數(shù)化算法有效性驗證,以證明其在實際應(yīng)用模型中的實效性。
4 仿真驗證分析
構(gòu)建三連桿機械臂模型,包含三個旋轉(zhuǎn)關(guān)節(jié),即主軀干臂與水平面運動、主軀干臂與次軀干臂運動、次軀干臂與吊臂運動。通過對機械臂單次拉伸動作控制仿真研究,證明直接參數(shù)化算法應(yīng)用于機械臂控制器的最終實際效果。
4.1 機械臂模型構(gòu)建
三連桿機械臂模型構(gòu)建主要劃分為兩大部分,即機械臂剛體部分,各個連桿臂與關(guān)節(jié)之間對接,物理參數(shù)設(shè)置具體如表1所示;關(guān)節(jié)控制部分,各關(guān)節(jié)基于控制信號通過控制器的控制回路對關(guān)節(jié)旋轉(zhuǎn)進行有效控制[8]。

表1 三連桿機械臂模型參數(shù)
其中,重力加速度g為-9.8m/s2。
4.2 控制器參數(shù)優(yōu)化
通過直接參數(shù)化算法優(yōu)化控制器參數(shù)的方法面向各個參數(shù)尋優(yōu),對三連桿機械臂關(guān)節(jié)響應(yīng)指標進行綜合考察,同時與基于z-n臨界比例度法整定的響應(yīng)結(jié)果比較分析。直接參數(shù)化算法參數(shù)具體即:最大迭代數(shù)為104;加速度常數(shù)為1.21;慣性權(quán)重為0.92;適應(yīng)度函數(shù)指標權(quán)重為0.53。三連桿機械臂關(guān)節(jié)旋轉(zhuǎn)角度以激勵信號為依據(jù)采取階躍信號,信號參數(shù)具體如表2所示。

表2 控制信號參數(shù)
通過z-n臨界比例度法與直接參數(shù)化算法對控制器參數(shù)進行整定分析。兩種不同算法整定之后,機械臂關(guān)節(jié)在既定時間內(nèi)響應(yīng)曲線[9]具體如圖2~圖4所示。
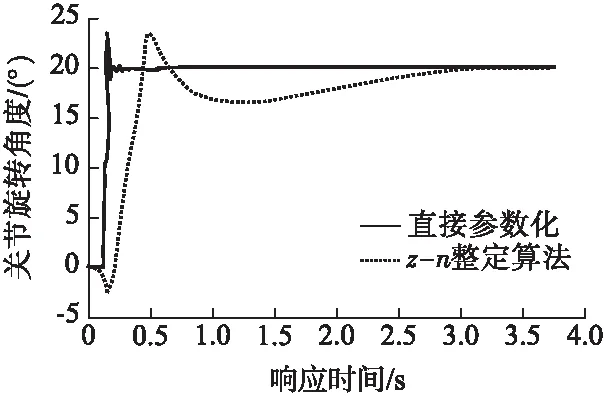
圖2 關(guān)節(jié)一4s以內(nèi)響應(yīng)曲線
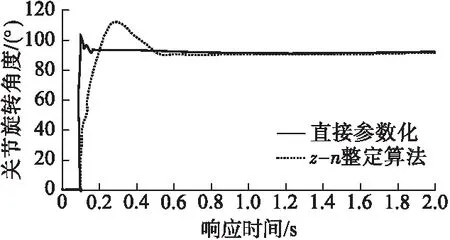
圖3 關(guān)節(jié)二2s以內(nèi)響應(yīng)曲線
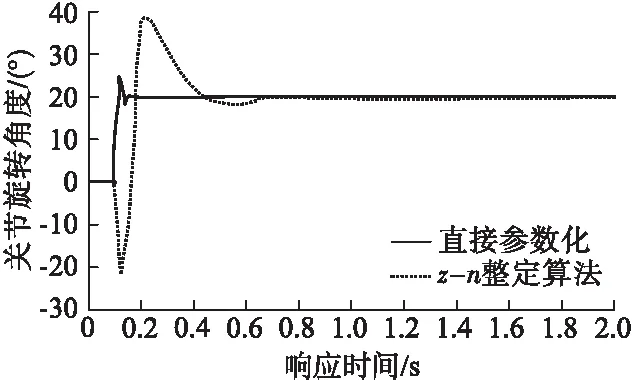
圖4 關(guān)節(jié)三2s以內(nèi)響應(yīng)曲線
由圖2~圖4可知,直接參數(shù)化算法在進行機械臂關(guān)節(jié)響應(yīng)優(yōu)化之后,并沒有出現(xiàn)振動現(xiàn)象,在0.2 s周圍到達穩(wěn)定狀態(tài),超調(diào)量適宜。由于調(diào)節(jié)時間較短,可明確機械臂拉伸動作為一步到位,從而直接獲得了機械臂的良好控制效果,這就直接證明了直接參數(shù)化算法在三連桿機械臂控制器參數(shù)優(yōu)化中的有效性。
此外,基于響應(yīng)曲線測試的系統(tǒng)響應(yīng)超調(diào)量與調(diào)節(jié)時間,面向直接參數(shù)化算法與z-n臨界比例度法在三連桿機械臂控制器參數(shù)優(yōu)化中的實際效果進行對比分析,具體指標[10]如表3所示。
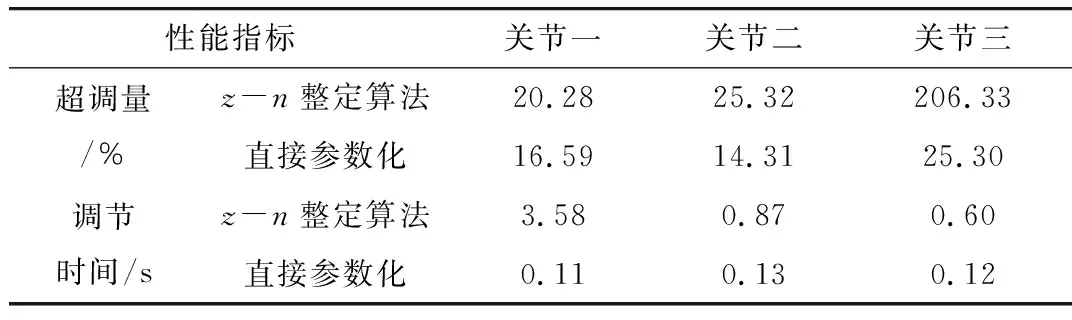
表3 關(guān)節(jié)響應(yīng)性能指標
由表3可知,在工業(yè)層面應(yīng)用較為廣泛的z-n臨界比例度法在三連桿機械臂控制器參數(shù)優(yōu)化中的效果并不顯著,但是直接參數(shù)化算法在超調(diào)量指標層面可獲得顯著優(yōu)勢,且調(diào)節(jié)時間較短,這就表明直接參數(shù)化算法在三連桿機械臂控制器參數(shù)優(yōu)化中更具優(yōu)越性。
5 結(jié) 論
總之,通過三連桿機械臂動力模型,明確直接參數(shù)化算法,有效解決系統(tǒng)特征結(jié)構(gòu)配置問題,促使閉環(huán)系統(tǒng)轉(zhuǎn)變?yōu)榫€性系統(tǒng),并且具備所需特性結(jié)構(gòu)。基于Simulink仿真驗證直接參數(shù)化算法,結(jié)果表明,直接參數(shù)化算法不僅簡潔可靠,還能獲取所期系統(tǒng)動態(tài)特征;控制器可實現(xiàn)機械臂穩(wěn)定運轉(zhuǎn)于直立平衡點位置;直接參數(shù)化算法可顯著優(yōu)化機械臂各個關(guān)節(jié)響應(yīng)調(diào)節(jié)時間與超調(diào)量,在參數(shù)優(yōu)化后,機械臂拉伸動作關(guān)節(jié)響應(yīng)既消除了振動,又減小了超調(diào)量,且調(diào)節(jié)耗費時間非常短。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
