新型智能床椅一體化機器人設計
2020-12-21 08:48:08周曉蓉王遵樂申昌睿林國金
中國新技術新產品 2020年20期
周曉蓉 王遵樂 申昌睿 林國金
(廣西大學機械工程學院,廣西 南寧 530000)
1 研究背景及意義
隨著社會發展,人口老齡化已經成為21 世紀不可逆轉的趨勢,人們對醫療護理設備的需求不斷提高,對于失能老人的照料與看護問題成了越來越突出的社會問題。與此同時,服務機器人在國內外市場的增速越來越快,預計2020 年~2022 年,全球的服務機器人平均將會有30%以上的持續增速[1]。因此,為了使病床與輪椅兩者有效結合,減輕醫護人員照顧失能老人的過程中病人在病床和輪椅上轉移的工作量,避免病人二次受傷。該文設計了一種新型智能床椅一體化機器人,該結構既是多功能護理床,又是智能輪椅,具有床椅分離、背部抬升、頭部抬升、腿部抬升、防跌倒以及防墜床等功能。可以實現輪椅和病床主體結合與分離,且輪椅折疊與展開操作簡便,方便患者出行活動,不僅可以在醫院使用,也可以在家中使用,服務于更多在家中療養的患者以及行動不便的老人[2]。
2 具體結構設計
該新型智能床椅一體化機器人設計可以實現輪椅和病床主體智能控制結合與分離,病患所需要做的只是從床的中間挪動輪椅部分即可完成從臥床到坐上輪椅出行的動作,可以減少甚至不需要其他輔助起床,輪椅可單獨使用,方便患者出行活動。主要由床體部分和智能輪椅部分組成。
床板和輪椅支架上還分別設計安裝了床體控制箱和輪椅控制箱,床體電動推桿與床體控制箱電連接,輪椅電動推桿、升降驅動機構均與輪椅控制箱電連接。升降驅動機構包括依次連接的升降電機、齒輪傳動組件以及絲杠螺母組件。齒輪傳動組件包括主動齒輪以及從動齒輪,絲杠螺母組件包括升降絲杠以及升降螺母。
2.1 床體部分
床體部分包括床支架、床架、床墊、背部抬升推桿,安裝在床架之下。床輪安置在床支架底部。扶手安裝在床架一側。床輪采用萬向輪裝置,方便病床移動。床板、床墊、輪椅架和輪椅墊可拆卸,方便對整個病床進行維修和清洗。
2.2 智能輪椅部分
可分離智能輪椅部分包括輪椅支架、輪椅架、輪椅墊以及電動推桿,安裝在輪椅支架上。前萬向輪安裝在輪椅支架底部前部。后輪安裝在輪椅支架底部后部。扶手安裝在輪椅架兩側,分別為固定扶手和可升降扶手。輪椅部的后輪上還設計了驅動電機,驅動電機與輪椅控制箱電連接,用以控制輪椅部分實現與床體部分自由結合分離過程,方便患者的移動,輪椅可單獨移出使用。電動推桿主要實現背部、腿部聯動,實現輪椅平床模式與輪椅模式之間的轉換及頭部抬升功能。
3 具體實施過程
如圖1 所示,一種新型智能床椅一體化機器人,其特征在于,包括輪椅部分1、病床主體部分2[3]。病床部分和輪椅部分可通過智能控制,實現自動分離結合,分離輪椅作為智能輪椅可單獨使用。
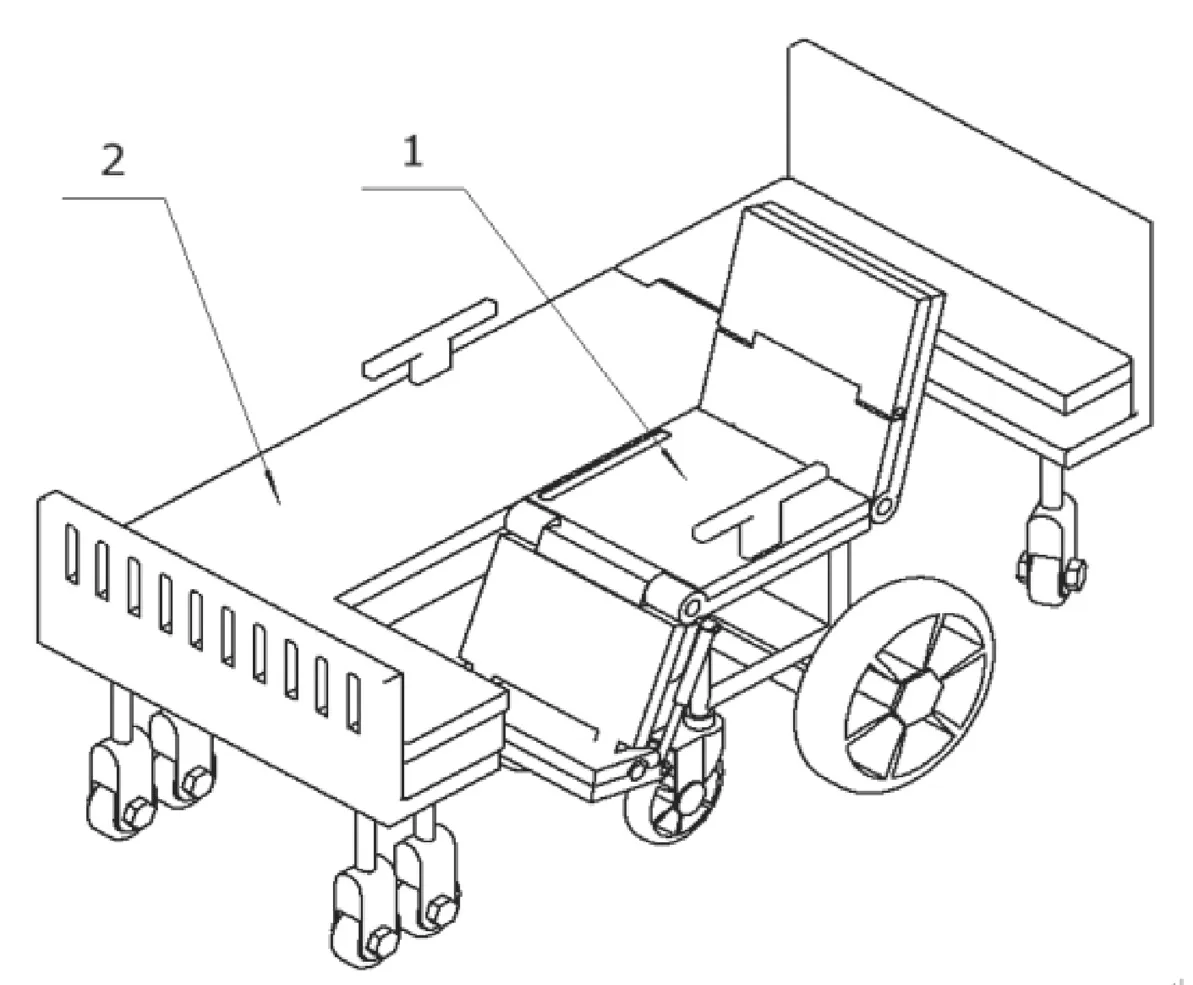
圖1 床椅一體化結構
如圖2 所示,單獨輪椅部分包括輪椅支架1.3,輪椅后輪1.4 和輪椅前輪1.5 安裝與輪椅支架1.3 底部,輪椅架1.2安裝于輪椅支架1.3 上,輪椅墊1.1 和扶手1.7 安裝在輪椅架1.2 上,電動推桿1.6 安裝在輪椅支架1.3 和輪椅架1.2上。
具體實施過程如圖3 所示,多處電動推桿1.6 由控制器控制,實現背部底架、腿部底架、踏板底架抬升動作,可在參數范圍內自由調節輪椅背部、腿部傾斜程度,使患者有更舒適的體驗。
輪椅扶手安裝在輪椅座板兩側,分別為固定扶手和升降。坐板的一側開設計有對接口,在對接為床狀態時,對接板與對接口對應連接。升降扶手設在坐板開設有對接口的一側,輪椅支架上還設有升降驅動機構,升降驅動機構與升降扶手連接,通過升降驅動機構實現升降扶手的升降。升降驅動機構包括依次連接的升降電機、齒輪傳動組件以及絲杠螺母組件。升降電機與輪椅控制箱電連接,絲杠螺母組件與所述升降扶手連接,升降電機通過齒輪傳動組件傳動絲杠螺母組件,從而驅動升降扶手實現升降,使床椅精準、穩定結合。
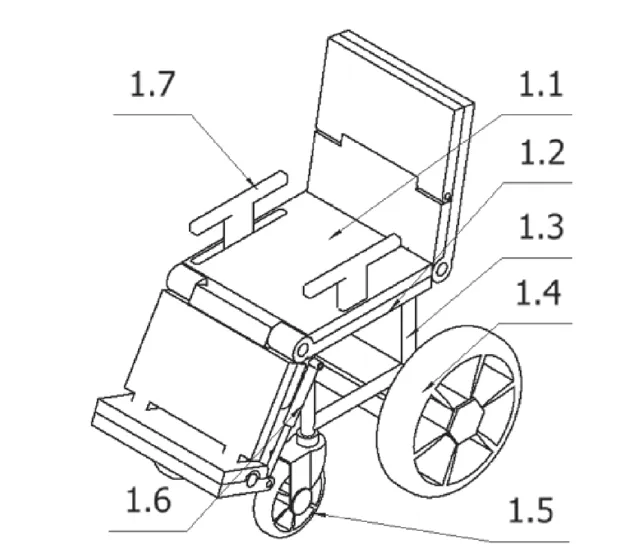
圖2 輪椅結構圖
床體部分如圖1 所示,包括床支架,6 個萬向床輪安裝在床支架底部,床架安裝在床支架上部,床墊安裝在床架上,扶手安裝在床架上,電動推桿安裝在床架上。
具體的實施過程為床體安裝萬向床輪,方便移動,電動推桿由控制器控制,可實現頭部抬升,在參數范圍內自由調節合適高度。
該發明還包括控制器、電機和激光傳感器,控制器安裝在輪椅支架1.3 和床體部分床架上,用于控制電動推桿調節病床和輪椅,安裝在輪椅支架1.3 的電機通過齒輪傳動用于驅動輪椅上可動扶手的升降動作和輪椅后輪1.4,激光傳感器安裝在輪椅床體連接固定裝置和輪椅可動扶手處,實現輪椅和床體連接時精準快速定位[4]。
4 工作原理
該發明新型床椅一體化機器人可實現臥床病患自主控制自己起臥和移動。當病患需要起床出門時,須自己先移動到病床輪椅一側,然后通過控制輪椅由平床模式轉換為輪椅模式,再控制輪椅移動出來,即可進行輪椅單獨使用。
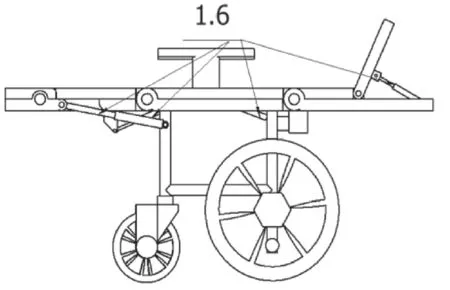
圖3 輪椅平床模式
當病患需要回床休息時,操作輪椅到達床體一側相應位置處,使用輪椅和床體自動結合功能,實現輪椅和床體精準快速結合,在調節輪椅變為平床模式即可進行休息。床椅一體化模式時并且還需要做起休息時,可通過控制器控制頭部抬升至合適做起位置。
整個過程采用智能控制,實現床椅分離、頭部抬升、背部調節、腿部調節、背膝聯動、輪椅轉向等控制。達到方便患者在生活中的簡單自理,減輕醫護人員和家屬的壓力。
5 結語
該設計是一種新型智能床椅一體化機器人,該設計結構可實現病床和輪椅的有效結合,符合人體工程學設計,既解決了醫護人員將病人在病床和輪椅之間的轉移過程的困難,也避免病患在轉移過程中受到二次傷害,適用于醫院臥床病患和家庭失能老人等廣泛群體[5]。操作過程采用智能端控制,使用者通過智能控制面板即可控制床椅分離、背部抬升、腿部抬升等動作,操作簡單,方面患者自由自理生活。國內市場目前在該方面發展還不夠完善,無法達到簡單操作控制實現全面功能,因此不能在市場普及。而該產品功能齊全,操作簡單,可靠性好,成本低,可在市場推廣使用。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
