基于格子玻爾茲曼方法的側窗水相分析與控制
2020-12-21 03:10:06高炳釗胡興軍葛長江
哈爾濱工業大學學報 2020年1期
辛 俐,高炳釗,2,胡興軍,2,桑 濤,2,葛長江,2,劉 江
(1.吉林大學 汽車工程學院,長春130022;2.吉林大學 汽車仿真與控制國家重點實驗室,長春130022)
側窗的清晰度對保證汽車駕駛的安全性和舒適性有著重要作用[1]. 汽車在大雨中行駛,雨水在側窗玻璃上積聚形成的水膜或者水流,會嚴重阻礙駕駛員視野. 因此,在汽車設計過程中,控制車身表面的雨水十分重要.
根據污染源的不同,汽車外部水管理主要分為三個研究方面:表面水流、自身濺水污染以及外車濺水污染[2-3]. 汽車在雨天行駛時,雨水在車身表面的分布和運動情況屬于表面水流[4]. 傳統的汽車外部水管理問題在汽車設計的后期才能被發現,難以滿足新車型開發周期及成本的需要. 國外有學者采用數值模擬的方法解決此類問題[5]. Kenneth J. Karbon等人在計算穩定流場的基礎上,運用多相流方法模擬雨水在車身表面的流動狀態,并通過實驗初步驗證了數值模擬的可行性[6-7]. Nicolas Kruse等人在此基礎上將DPM模型與歐拉液面模型結合,完善液膜分離模型,考慮壁面的局部濕潤條件和液面的局部力平衡,改進氣液、氣固和液液之間相互作用的計算,提高了計算的準確性[8]. Filipe Fabian Buscariolo等利用VOF方法進行多相流計算,明確雨水從車頂流向水槽的路徑,避免乘客開窗時被雨水淋濕[9]. Adrian P. Gaylard等采用格子玻爾茲曼結合多相流的方法模擬水流在A柱和側窗上的運動狀態,預測A柱溢流發生位置,并用實驗驗證了仿真結果的可靠性[10]. 以上學者集中于車身表面水流以及A柱溢流現象的研究,缺少對側窗水相分布影響因素的研究.
本文針對側窗水污染問題,應用空氣動力學知識和多相流理論,將格子玻爾茲曼方法和拉格朗日方法相結合,分析影響側窗水污染的因素,在此基礎上提出有效的控制措施,探討不同A柱型面對側窗清晰度的影響,為后續研究提供一定的理論指導.
1 數值計算理論
1.1 格子玻爾茲曼法
格子玻爾茲曼方法是建立在分子運動論和統計力學基礎上的一種模擬流場的數值方法. 相比于傳統的CFD方法,格子玻爾茲曼方法從微觀的角度獲取流體分子的運動信息,描述分子相互碰撞的統計學行為和規律,是宏觀連續模型和微觀分子動力學模型之間的介觀模型[11]. 該方法將流體看成許多微小粒子,把空間和時間完全離散,通過流體粒子的遷移和碰撞來描述流動現象,碰撞規則遵循質量、動量和能量守恒定律[12].
格子玻爾茲曼模型由離散速度模型、平衡態分布函數以及分布函數的演化方程三個部分組成[13]. 本文采用的是D3Q19離散速度模型,其速度結構如圖 1所示.
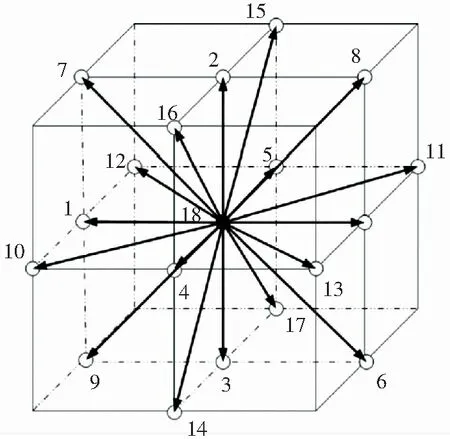
圖1 D3Q19模型速度結構圖
格子玻爾茲曼方法描述的流體粒子位于網格點上并沿著其速度方向進行演化. 流體粒子的演化可分解為碰撞和遷移兩個過程,碰撞過程為
遷移過程為
式中:f為概率密度分布函數,τ為松弛時間,feq為平衡態分布函數.
對于D3Q19模型,離散速度ξα的計算如下[14]:
平衡態分布函數feq可表示為

1.2 顆粒動力學理論
模擬側窗水相分布時,將雨滴定義為球形顆粒,采用拉格朗日離散相模型模擬,利用求解運動方程單獨追蹤這些顆粒在流場中的運動軌跡[15]. 單個雨滴顆粒的運動方程為
式中:v為來流速度,vp為顆粒速度,R為雨滴顆粒的半徑,mp為粒子的質量,g為重力加速度,μ為流體動力粘度,ρ為流體密度,CD為雨滴阻力系數,Re為相對雷諾數. 其中:
此外,水滴顆粒間也會發生碰撞合并,在數值模擬時,利用O’Rourke的顆粒塊模型將一定數量的水滴顆粒作為一個整體代替單個顆粒的碰撞計算,從而有效減少計算量. 利用泰勒類比液滴破碎(TAB)模型模擬顆粒破碎,當水滴顆粒的震蕩變形過大時,大液滴將會破碎成小液滴[16].
2 試驗與仿真
為了驗證數值仿真方法的精度和可行性,通過風雨耦合試驗平臺對某實車進行試驗,如圖 2所示. 試驗風速50 km/h,淋雨面積為30 m2,供水量為0.51 m3/h. 仿真風速等同試驗風速,設置降雨量為17 mm/h,離散相設置與后續計算中設置一致. 將仿真計算得到的側窗區域液膜厚度分布圖與試驗結果進行了對比,如圖 3所示. 結果表明側窗污染區域和沉積趨勢與試驗結果存在良好的一致性,仿真方法可靠性較高.

圖2 風雨耦合實驗平臺
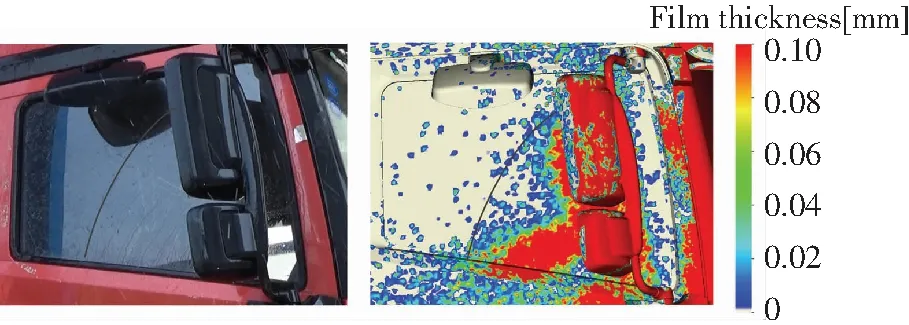
圖3 試驗與仿真結果對比
3 數值仿真方案設置
3.1 計算模型及網格劃分
DrivAer模型是依據寶馬3系和奧迪A4建立的標準模型,具有整車細節,相比Ahmed、MIRA、SAE等簡化標準模型更具代表性[17].為更好地體現整車幾何細節,采用STL格式劃分面網格,將網格弦偏差設置為0.012 5 mm,最大網格尺寸設為15 mm. 為控制網格總數,節省計算成本,且能捕捉流場細節,保證仿真結果的精確度和可靠性,對計算敏感區域進行加密,共設置10個VR區(加密區),如圖4所示.
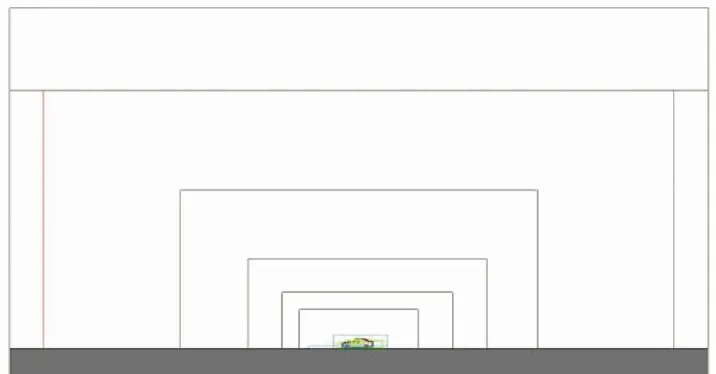
圖4 VR區示意圖
最小VR區的網格尺寸為1.25 mm,網格尺寸隨VR區依次向外逐倍增加,最終體網格的分布如圖 5所示,網格總數共計8397.36萬.
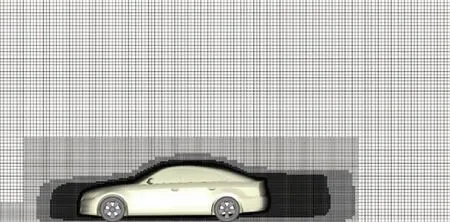
圖5 體網格示意圖
3.2 離散相模型設置
離散相參數主要包括離散相噴射口,初始條件,邊界條件等,這些參數的正確設置是準確模擬側窗水污染的必要條件. 為真實模擬雨天環境,本文在汽車前方設置雨滴發射器,如圖 6所示,雨滴發射器噴射范圍需覆蓋整車,考慮前方氣流分離以及汽車尾渦的影響,其寬度應大于兩倍車寬. 本文計算工況為大雨,參數設置如下:設置進入流場的雨量為17 mm/h,雨滴顆粒粘度為0.001 Pa·s,表面張力為0.072 8 N/m2,顆粒密度為1 000 kg/m3,并考慮重力影響,g=9.8 m/s2,雨滴顆粒直徑分布服從Gaussian分布,粒子最大半徑為3 mm,最小為1 mm. 雨滴顆粒在求解過程中考慮碰撞、破碎、飛濺,聚合. 雨滴的水平初速度為27.78 m/s,等同于車速. 其中:
式中:HV為車高;Vd為雨滴豎直方向的最終速度;Ve為車速,即入口的風速.
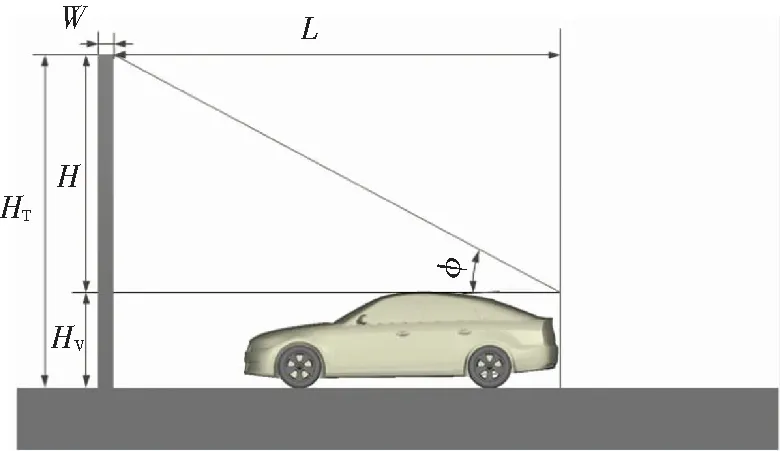
圖6 雨滴發射器示意圖
3.3 邊界條件以及求解
仿真過程中,針對雷諾數不同的區域,選用不同的計算方法. 采用格子玻爾茲曼方法計算自由流區域,采用ABLM邊界層模型以及直接模擬方法計算車身近壁面區域,采用非常大渦模擬方法計算尾流區域的小尺寸渦結構[18-19]. 邊界條件如表 1所示.

表1 邊界條件設置表
4 計算結果與分析
水滴與車身表面碰撞時可能會發生粘附、反彈、擴張或者飛濺. 粘附、擴張和飛濺都會在車身表面形成液膜,液膜隨近壁面氣流流動,進而形成水污染. 側窗區域的水污染來自:A柱溢流;來流中夾帶的水滴直接撞擊側窗玻璃;后視鏡表面脫落的大水滴撞擊側窗玻璃. 通過對basic模型計算分析,確定該車的側窗區域水污染的來源. 圖 7為側窗區域液膜厚度分布,可見basic模型側窗水污染嚴重.
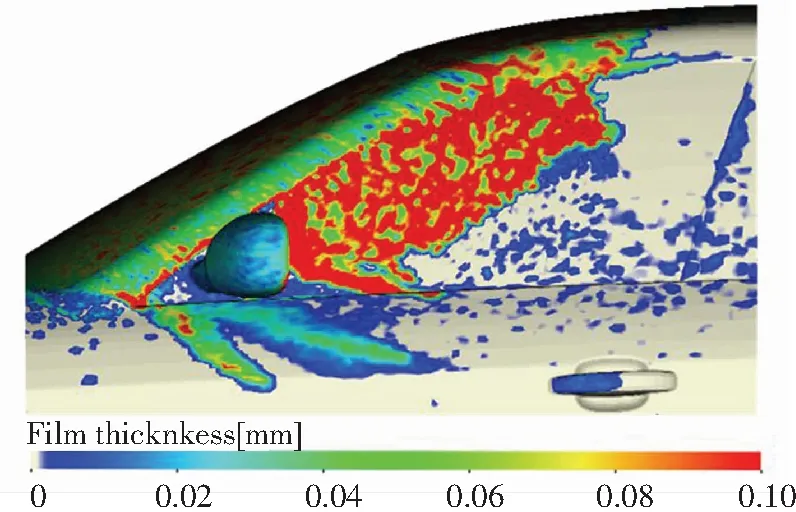
圖7 液膜厚度分布圖
來流中夾帶的雨滴直接撞擊車身表面時會形成撞擊點,如圖 8所示,藍色點為撞擊點. 由于A 柱附近和側窗區域存在強烈的渦流,氣流在這個區域先分離再附著,雨滴在氣流的作用下直接撞擊到車窗下方,對駕駛員視野區造成污染較少.
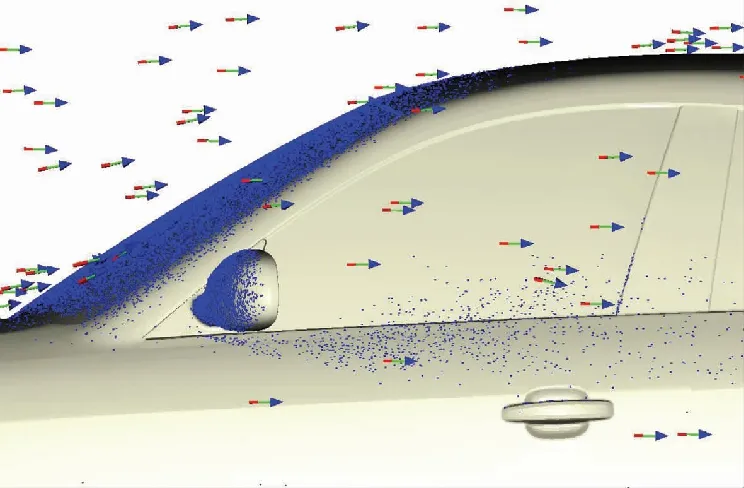
圖8 車身表面撞擊點示意圖
圖9為渦速度λ2等值面,能夠表達速度在空間上的變化情況,體現大尺度湍流流動. 由圖9可知,氣流附著在后視鏡的迎風面上,在后視鏡的邊緣產生剪切層分離流動,此處液膜與壁面的接觸處會產生液膜流動以及液膜分裂出液滴等復雜物理現象. 圖 10為不同時刻后視鏡縱向截面上水相分布圖,可以發現,隨著計算時間的增加,后視鏡表面積聚的水膜在強剪切的作用下從后視鏡后端邊緣脫落,隨氣流形成環狀渦流運動,液滴撞擊在側窗區域后方,并未對駕駛員關鍵視野區造成影響.
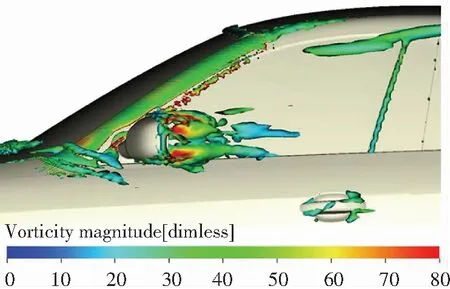
圖9 λ2=-50等值面
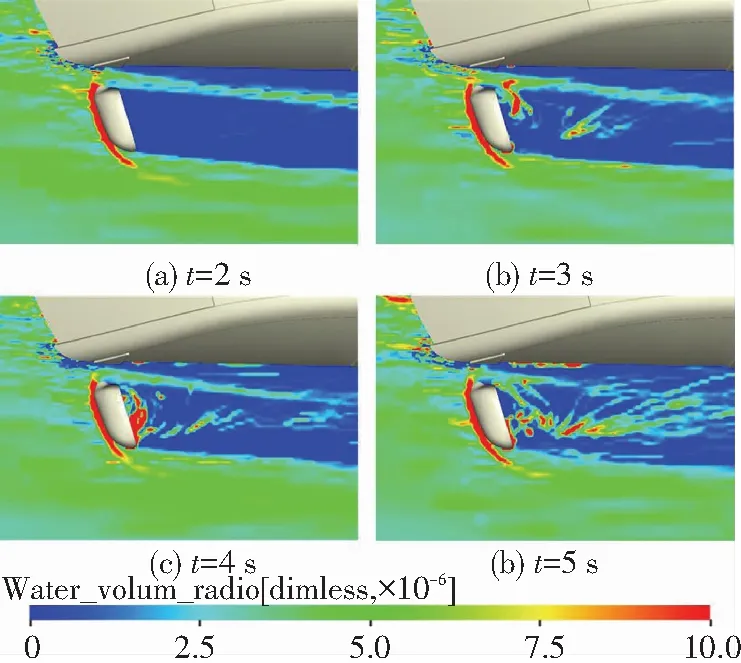
圖10 后視鏡縱向截面水相分布圖(Z=0.7 m)
Fig.10 Water phase distribution of mirror longitudinal section(Z=0.7 m)
液膜的流動取決于表面張力,氣流剪切力、壁面摩擦力以及重力之間的平衡關系,其中氣流剪切力和重力起主要作用[20]. 受A柱分離渦結構的影響,近側窗區域的氣流流速明顯減小,圖 11可知,速度的變化導致車身表面剪切力在5 N/m2的范圍內波動. A柱表面剪切力較高,水膜流速較大,擋風玻璃處的水膜在剪切力的推動作用下溢過A柱向側窗流動,如圖12所示. 側窗區域表面剪切力較小,水膜在重力影響下向下流動,進而影響駕駛員的視野.
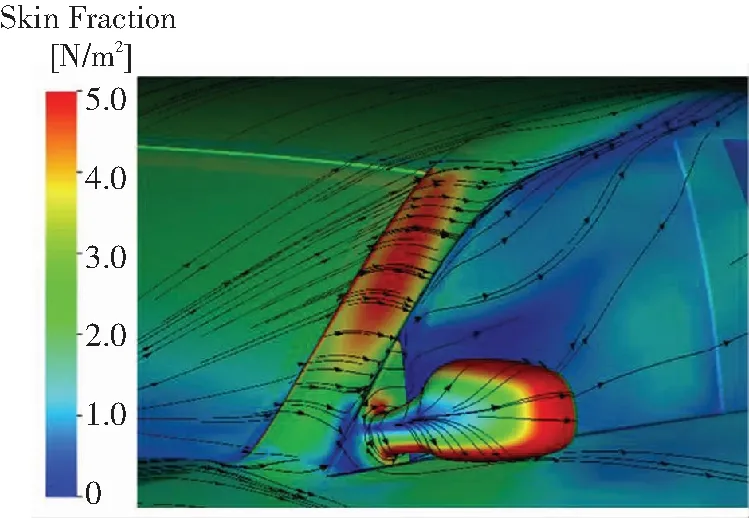
圖11 表面摩擦力
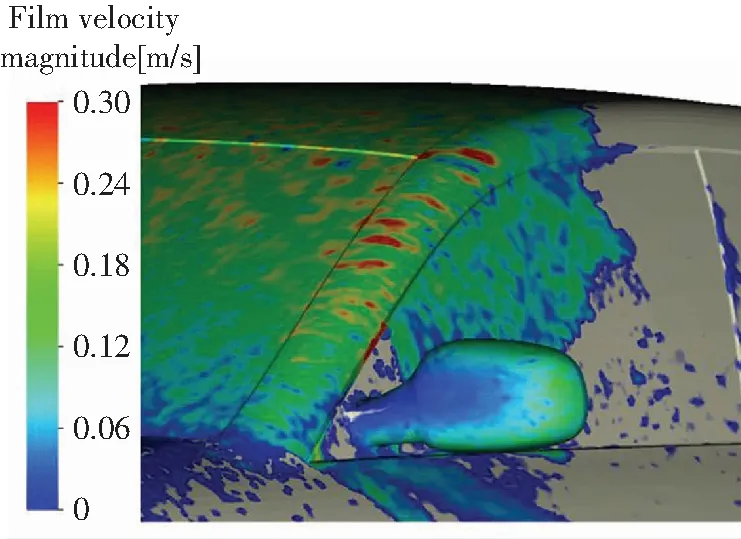
圖12 液膜速度
5 改進方案及結果分析
5.1 改進方案
通過上述分析可知,該車型側窗區域水污染來源于A柱溢流. 基于此對basic模型的A柱型面進行分析,如圖 13所示, A柱與前擋風玻璃之間的過渡過于平緩,導致水流溢過A柱造成側窗污染.
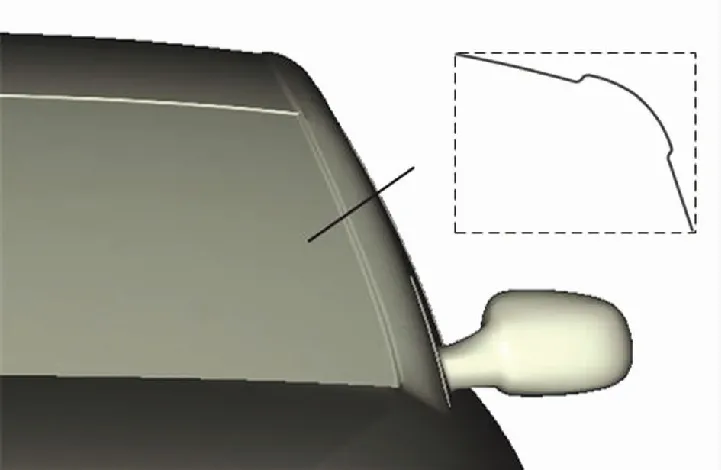
圖13 basic模型A柱型面
在basic模型的基礎上,對A柱型面進行修改,提出了如圖 14所示的4種優化方案,其中紅色虛線代表basic模型的A柱型面,黑色實線為優化模型的A柱型面. 期望獲得A柱結構與側窗水污染面積之間的關系,改善A柱附近流動狀態,減少側窗水污染.
5.2 結果分析
汽車側窗區域多為三維復雜曲面,衡量側窗實際污染面積較為困難,運動圖像處理軟件,將三維問題轉換為二維問題,可有效將側窗污染面積量化,本文用污染面積像素Rs和區域面積像素Rw的比值Rv來衡量污染程度.
式中:Rs為側窗污染區域的像素數,Rw為側窗區域總像素數. 各工況下的污染情況如表2所示. 其中方案2的側窗水污染面積Rv最小,較basic模型減小了19.2%,車窗視野最好.
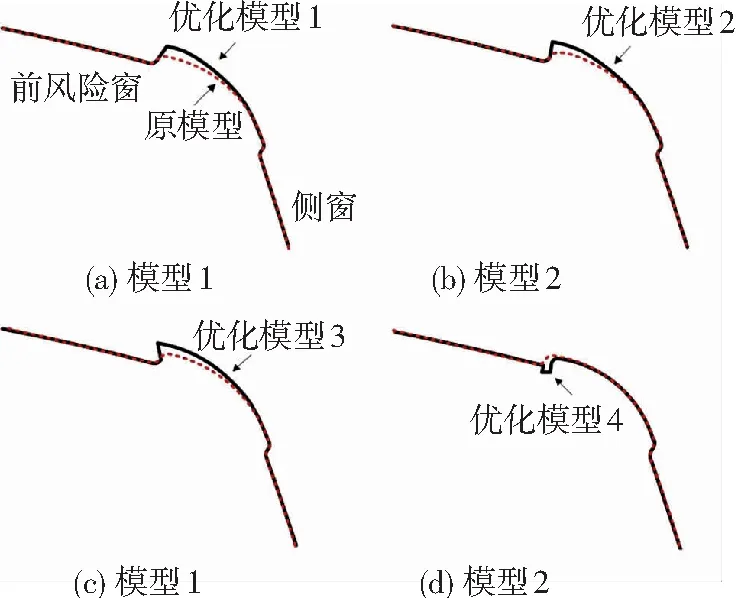
圖14 優化方案的A柱型面圖
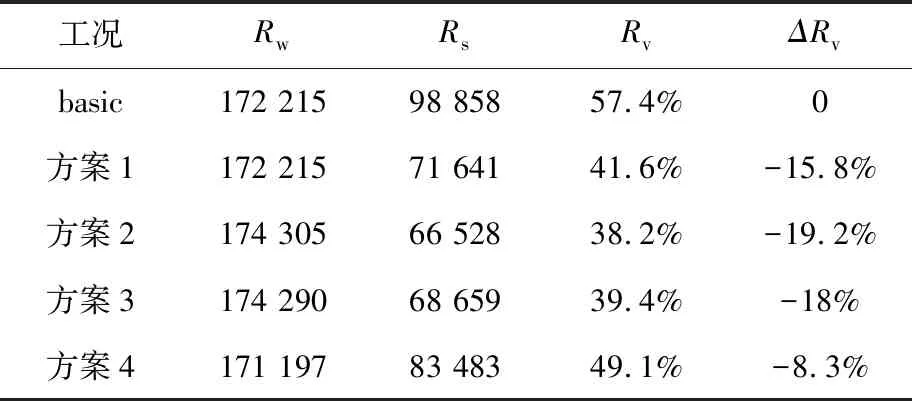
表2 水相附著區域面積
各優化方案側窗區域的液膜厚度分布如圖15所示. 與basic模型相比,4種A柱優化型面有效抑制了A柱溢流,減小了側窗區域水污染面積. 為直觀分析雨水污染來源,將側窗區域進行劃分為T區、M區和L區,如圖 15(a)所示.
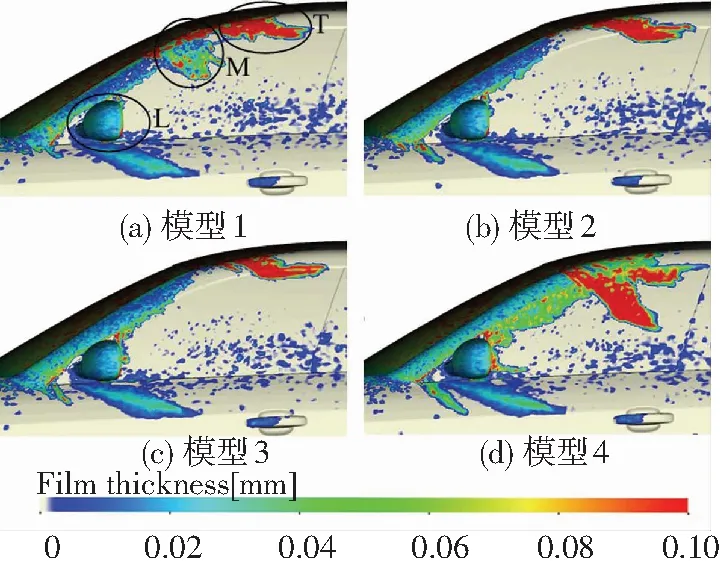
圖15 各優化方案液膜厚度分布圖
各模型液膜速度圖如圖16所示,前擋風玻璃底部水膜速度較低,原因為此處氣流分離渦的影響形成速度相對靜止區. 而前擋風玻璃上方的水膜在高速氣流剪切力的作用下向A柱運動,因此A柱交接處水膜速度較大. 該模型車頂部缺乏流水槽,匯集在車頂部的水膜在剪切力的作用下流向側窗,造成T區域水污染.
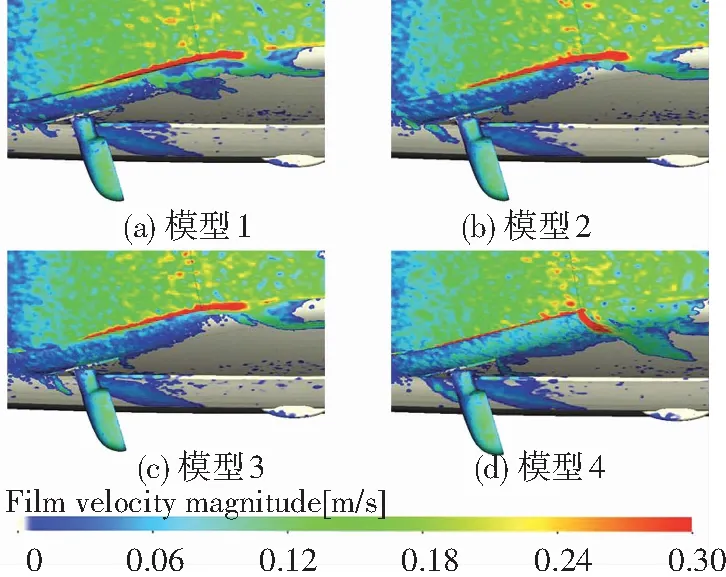
圖16 各優化方案液膜速度圖
模型4在T區域的污染面積較大,液膜具有向下流動的速度. 由圖 17可知,相比其他模型,模型4 T區域氣流沿著上邊梁向側窗流動,且側窗區域表面剪切力較小,加之重力的影響作用,因此水膜更易向下流動,損害駕駛員視野.
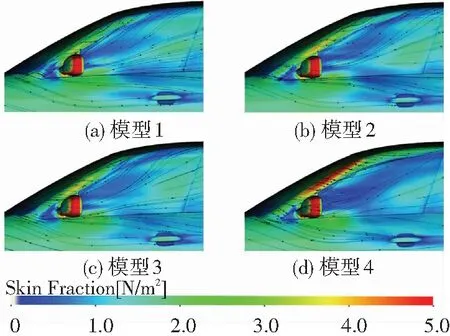
圖17 各優化方案車身表面剪切力及表面流線圖
Fig.17 Surface shear forces and streamlines of optimization model
車身表面在前擋風玻璃、車頂部與A柱交界處曲率變化較大,水膜在此處匯集,水膜表面張力易受氣流剪切力的破壞. 從圖18(b)、(c)Z向水相分布圖可見,模型2與模型3的水膜在A柱渦的強剪切作用下與車身表面分離,因此M區污染較小. 由圖18(a)可見,模型1水膜產生飛濺的同時有一部分會沿著車身表面移動,溢過A柱,造成M區域污染. 氣流沿模型4A柱型面平滑的流向后方,飛濺現象不明顯,A柱型面水膜在氣流剪切力的作用下流向側窗造成M區域污染,如圖 16(d)所示.
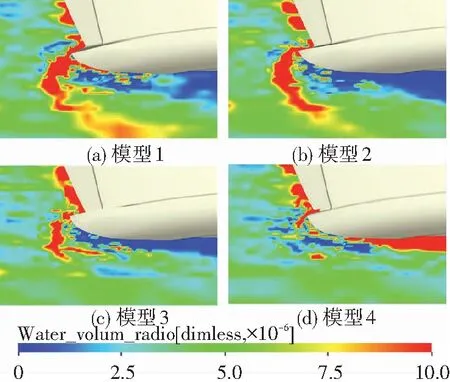
圖18 各優化方案Z向水相分布圖(Z=0.97 m)
Fig.18 Water phase distribution of optimization models(Z=0.97 m)
僅模型4在L區域存在明顯側窗污染,由圖17發現,模型4A柱表面剪切力明顯大于其他模型,A柱水膜在高剪切力的作用下向側窗流動,L區域表面剪切力較小,水膜因重力向下流動,形成L區域污染.
5.3 改進方案對整車阻力的影響
為了評估改進方案對整車阻力的影響,對比了basic模型與優化A柱型面后整車阻力系數的的變化,如表3所示.
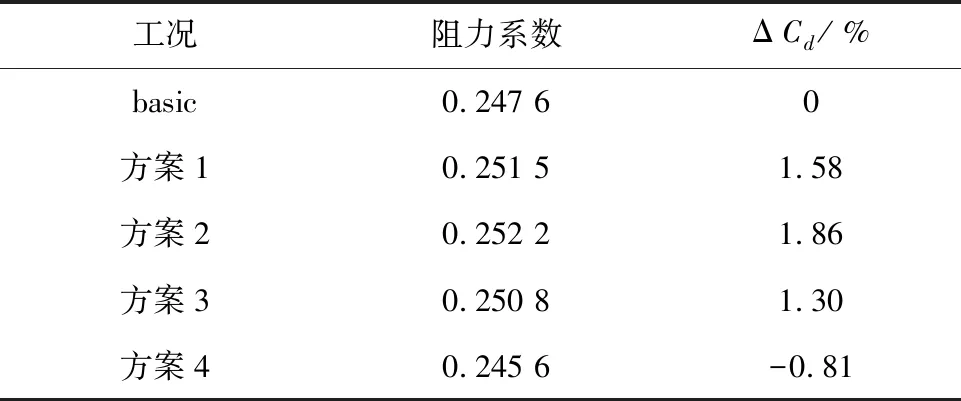
表3 不同方案對比
由表3可知,對A柱型面進行優化后,方案1,方案2和方案3的整車阻力系數均有增加,但相對于basic模型,增阻率均在2%之內. 方案4阻力系數略微下降,減阻率僅為0.81%. 由此可見,A柱型面的改進方案對整車阻力影響較小.
6 結 論
1)利用玻爾茲曼與拉格朗日結合的方法對汽車側窗水污染進行了數值模擬,獲得雨水在車身表面的分布以及雨滴在車身表面的撞擊點,揭示側窗水污染產生的機理,為進一步研究提供理論依據.
2)水膜運動狀態主要受剪切力和重力的影響,氣流流速和水膜厚度的變化將導致水膜受力失衡,運動流跡改變.
3)4種A柱改型模型抑制了A柱溢流,減小了側窗水污染面積,其中模型2作用最顯著,側窗污染面積占38.2%,較basic模型降低了19.2%.
4)由于本文重點考慮抑制A柱溢流和機理的研究,在A柱型面對噪聲影響的方面未兼顧考慮,后續工作中需綜合研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
