遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)在電液力伺服系統(tǒng)辨識(shí)中的應(yīng)用
2020-12-23 02:15:56周挺王虎
機(jī)械工程師 2020年12期
周挺, 王虎
(航空工業(yè)飛機(jī)強(qiáng)度研究所,西安710065)
0 引 言
電液力伺服系統(tǒng)結(jié)合了電子技術(shù)、伺服控制、液壓傳動(dòng)和傳感器技術(shù),通過(guò)電液信號(hào)轉(zhuǎn)換實(shí)現(xiàn)被控對(duì)象力控加載,具有功率質(zhì)量比大、結(jié)構(gòu)緊湊、響應(yīng)快、系統(tǒng)剛度大、控制精度高的特點(diǎn),廣泛應(yīng)用于飛機(jī)結(jié)構(gòu)強(qiáng)度試驗(yàn)中。由于伺服閥的死區(qū)和游隙、油溫和油壓的變化、黏性摩擦力等影響,系統(tǒng)為參數(shù)時(shí)變、非線性系統(tǒng)[1-2]。建立系統(tǒng)精確數(shù)學(xué)模型可為控制系統(tǒng)的分析和設(shè)計(jì)提供有力依據(jù)[3],基本建立方法包括機(jī)理建模法和系統(tǒng)辨識(shí)建模,機(jī)理建模需要對(duì)系統(tǒng)做一些合理假設(shè),通過(guò)確切的數(shù)學(xué)表達(dá)式描述系統(tǒng)的內(nèi)部機(jī)理,系統(tǒng)辨識(shí)建模則是在輸入和輸出數(shù)據(jù)的基礎(chǔ)上,從給定的模型類(lèi)中確定一個(gè)具有與辨識(shí)系統(tǒng)輸入輸出特征相同的等價(jià)模型。多層前饋BP(Back-Propagation)神經(jīng)網(wǎng)絡(luò)作為一種反向傳播學(xué)習(xí)的非線性網(wǎng)絡(luò),具有良好的非線性映射能力、自適應(yīng)能力、并行處理和全局優(yōu)化能力,能有效辨識(shí)多輸入多輸出的復(fù)雜非線性系統(tǒng)[4],但存在收斂速度較慢、對(duì)初始權(quán)值敏感、容易收斂至局部極小等缺點(diǎn)。遺傳算法(Genetic Algorithm)是一種基于自然選擇優(yōu)勝劣汰和群體遺傳演化的自適應(yīng)概率搜索算法[5],具有很強(qiáng)的魯棒性、并行計(jì)算能力和全局搜索能力。
本文采用遺傳算法優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)對(duì)電液力伺服系統(tǒng)進(jìn)行系統(tǒng)辨識(shí)建模,通過(guò)遺傳算法和BP算法的混合優(yōu)化,獲得最佳的網(wǎng)絡(luò)權(quán)值和閾值參數(shù);將該辨識(shí)模型與線性參數(shù)模型的辨識(shí)結(jié)果進(jìn)行比較,驗(yàn)證遺傳優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)在系統(tǒng)辨識(shí)建模上的有效性。
1 電液力伺服系統(tǒng)
電液力伺服系統(tǒng)結(jié)構(gòu)如圖1所示,控制器根據(jù)載荷傳感器反饋值和上位機(jī)指令值之差輸出閉環(huán)控制信號(hào),伺服驅(qū)動(dòng)器實(shí)現(xiàn)閉環(huán)控制信號(hào)放大和轉(zhuǎn)換,電液伺服閥根據(jù)驅(qū)動(dòng)信號(hào)轉(zhuǎn)換為對(duì)應(yīng)液壓負(fù)載流量,改變非對(duì)稱(chēng)液壓缸活塞位移,將載荷施加至負(fù)載(試驗(yàn)件)。首先建立電液伺服系統(tǒng)數(shù)學(xué)模型,可為系統(tǒng)辨識(shí)建模提供理論依據(jù)。
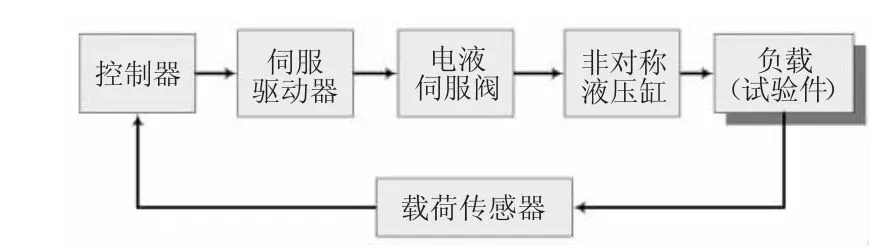
圖1 電液力伺服系統(tǒng)結(jié)構(gòu)圖
伺服驅(qū)動(dòng)器和載荷傳感器作為信號(hào)轉(zhuǎn)換模塊,其轉(zhuǎn)角頻率較系統(tǒng)固有頻率很高,可視為比例環(huán)節(jié),其增益分別為Kd和Kf。
電液伺服閥由力矩馬達(dá)和液壓放大器組成[6],第一級(jí)為雙噴嘴擋板,第二級(jí)為四通滑閥,其動(dòng)力學(xué)模型多采用二階振蕩環(huán)節(jié)形式,伺服閥空載流量qL0(s)滿(mǎn)足:

式中:kq為伺服閥流量增益;kc為伺服閥流量壓力增益;pL為負(fù)載壓力。kq和kc值隨閥工作點(diǎn)的變化而變化,由于閥經(jīng)常在零位工作,此處閥的流量增益kq0最大,流量壓力增益kc0最小,在系統(tǒng)分析時(shí)通常以零位系數(shù)作為閥的性能參數(shù),kc0由伺服閥零位泄漏流量qc決定,kc0=qc/ΔpN,其中qc為伺服閥零位泄漏流量,ΔpN為額定壓降。
考慮液壓缸的內(nèi)泄漏、外泄漏和壓縮性流量,其流量連續(xù)性方程為

式中:A1為無(wú)桿腔活塞面積;A2為有桿腔活塞面積;xp為活塞位移;Ctp為液壓缸總泄漏系數(shù),Ctp=(Cec/2+Cic);Cec為液壓缸外泄漏系數(shù);Cic為液壓缸內(nèi)泄漏系數(shù);Vt為液壓缸兩腔總?cè)莘e;βe為油液的等效體積彈性模量;α為非對(duì)稱(chēng)缸比例系數(shù)。
忽略庫(kù)倫摩擦力等非線性負(fù)載,假設(shè)負(fù)載包括慣性和彈性負(fù)載,不考慮活塞黏性摩擦力和外加負(fù)載變化,液壓缸驅(qū)動(dòng)力F與負(fù)載的力平衡方程為

式中:p1為無(wú)桿腔壓力;p2為有桿腔壓力;Ap為液壓缸等效活塞面積,可近似取Ap=(A1+A2)/2;mt為折算到活塞軸上的活塞與負(fù)載的等效總質(zhì)量;K為負(fù)載的彈性系數(shù)。
由式(2)~式(4)可得伺服閥空載流量輸入、液壓缸驅(qū)動(dòng)力輸出的傳遞函數(shù):

式(5)可表示為:
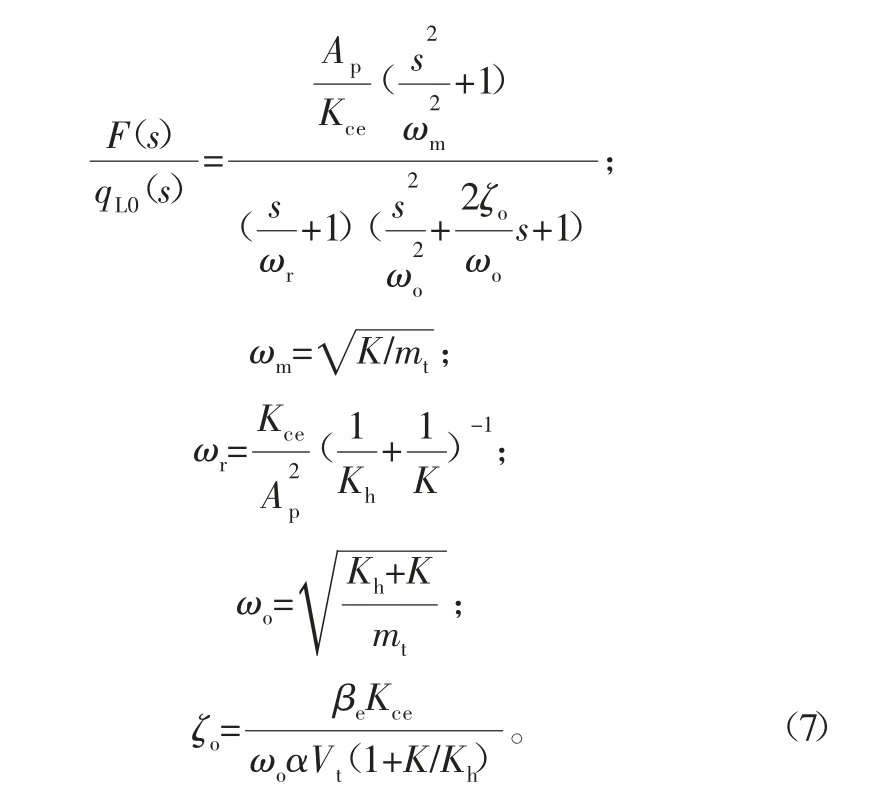
式中:ωm為負(fù)載的固有頻率;ωr為慣性環(huán)節(jié)轉(zhuǎn)折頻率;ωo為振蕩環(huán)節(jié)固有頻率,由液壓彈簧與負(fù)載彈簧并聯(lián)耦合與負(fù)載質(zhì)量形成;ζo為振蕩環(huán)節(jié)的阻尼比。
圖2為系統(tǒng)傳遞函數(shù)框圖,其中C(s)為控制器傳遞函數(shù)。

圖2 系統(tǒng)傳遞函數(shù)框圖
2 遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)系統(tǒng)辨識(shí)
2.1 BP神經(jīng)網(wǎng)絡(luò)辨識(shí)原理
BP神經(jīng)網(wǎng)絡(luò)一般為多層感知器模型,由輸入層、隱含層和輸出層組成,通過(guò)信號(hào)前向傳播和誤差反向傳播周而復(fù)始對(duì)網(wǎng)絡(luò)權(quán)值進(jìn)行動(dòng)態(tài)調(diào)整,使基于網(wǎng)絡(luò)輸出誤差的性能指標(biāo)函數(shù)達(dá)到最小,從而逼近系統(tǒng)輸入/輸出數(shù)據(jù)中的非線性映射,實(shí)現(xiàn)系統(tǒng)辨識(shí)建模[8]。圖3為BP神經(jīng)網(wǎng)絡(luò)辨識(shí)建模結(jié)構(gòu),設(shè)電液力伺服系統(tǒng)為NARMAX(非線性擴(kuò)展自回歸滑動(dòng)平均模型),有

式中,P為樣本總量數(shù)。
2.2 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
為了反映系統(tǒng)的動(dòng)態(tài)特性,并考慮系統(tǒng)的辨識(shí)精度,BP神經(jīng)網(wǎng)絡(luò)輸入層設(shè)4個(gè)神經(jīng)元,輸入值為d(k-1),d(k-2),u(k-1),u(k-2),輸出層為1個(gè)神經(jīng)元,為y(k)。選擇隱含層層數(shù)為1,隱含層節(jié)點(diǎn)選取要適中,節(jié)點(diǎn)過(guò)少,可能造成學(xué)習(xí)過(guò)程不收斂,系統(tǒng)辨識(shí)精度低;節(jié)點(diǎn)過(guò)多,則會(huì)影響學(xué)習(xí)速度,還會(huì)由于過(guò)擬合,造成網(wǎng)絡(luò)的容錯(cuò)能力及泛化能力的下降,因此確定神經(jīng)元個(gè)數(shù)為10。隱含層激勵(lì)函數(shù)為雙曲正切函數(shù)Tan-Sigmoid,輸出層激勵(lì)函數(shù)為線性函數(shù)Purelin。采用LM(Levenberg-Marquardt)算法進(jìn)行網(wǎng)絡(luò)參數(shù)學(xué)習(xí),LM算法的初始自適應(yīng)學(xué)習(xí)率μ為0.001,最大訓(xùn)練次數(shù)為100,性能指標(biāo)函數(shù)選擇均方誤差mse。

圖3 神經(jīng)網(wǎng)絡(luò)辨識(shí)建模結(jié)構(gòu)
2.3 初始權(quán)值和閾值的遺傳優(yōu)化
遺傳算法從包含問(wèn)題的解集中隨機(jī)挑選一個(gè)群體作為初始群體,通過(guò)編碼將問(wèn)題的解轉(zhuǎn)換為染色體或個(gè)體,根據(jù)自然選擇和遺傳進(jìn)化機(jī)制從初始種群出發(fā)對(duì)個(gè)體進(jìn)行隨機(jī)選擇、交叉、變異操作,按照適應(yīng)度函數(shù)評(píng)估個(gè)體性能,對(duì)個(gè)體進(jìn)行篩選,使群體進(jìn)化到搜索空間中更好的區(qū)域,經(jīng)過(guò)不斷迭代,得到群體中的最優(yōu)個(gè)體作為問(wèn)題的最佳解[10-11]。
本文基于MATLAB全局優(yōu)化工具箱,遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)初始權(quán)值和閾值的步驟如圖4所示。
1)初始種群。
根據(jù)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),采用實(shí)數(shù)編碼,對(duì)網(wǎng)絡(luò)的初始權(quán)值和閾值進(jìn)行編碼,編碼長(zhǎng)度為4×10+10+10×1+1=61,初始種群取值范圍為[-1,1],隨機(jī)產(chǎn)生100組長(zhǎng)度為61的實(shí)數(shù)序列,作為初始種群。
2)適應(yīng)度函數(shù)。
適應(yīng)度函數(shù)val(x)采用BP神經(jīng)網(wǎng)絡(luò)的性能指標(biāo)函數(shù)E,val(x)=E。
3)遺傳操作。
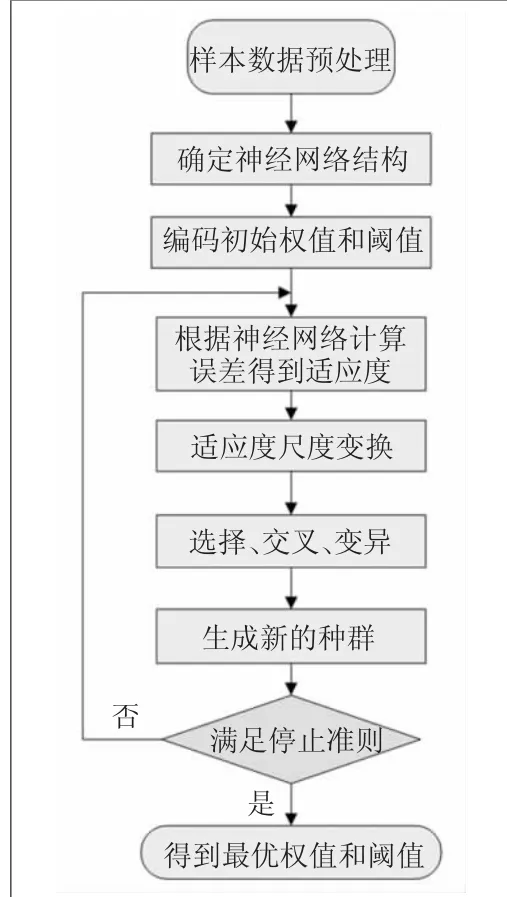
圖4 遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)初始權(quán)值和閾值
適應(yīng)度尺度變換函數(shù)把適應(yīng)度函數(shù)值轉(zhuǎn)換為適合于選擇函數(shù)使用范圍的值,包括排序、比率、最佳、線性變換等函數(shù),選擇比率(Proportional)方式,返回值與個(gè)體的適應(yīng)度值大小成比例;選擇參數(shù)為遺傳算法挑選下一代的雙親,包括隨機(jī)均勻分布、剩余、輪盤(pán)賭、錦標(biāo)賽等函數(shù),選擇隨機(jī)均勻分布(Stochastic uniform)方式,將每一個(gè)父輩根據(jù)適應(yīng)度值按比率布局在一條線上,算法以相同大小的步長(zhǎng)沿線移動(dòng),根據(jù)降落的位置確定每一個(gè)父輩;優(yōu)良個(gè)體(EliteCount)確定將具有最佳適應(yīng)度值的個(gè)體遺傳到下一代的個(gè)體數(shù),取5;交叉參數(shù)說(shuō)明父輩如何交叉基因產(chǎn)生子輩,包括分散、單點(diǎn)交叉、兩點(diǎn)交叉等,選擇分散(Scattered)函數(shù),通過(guò)一個(gè)二進(jìn)制向量確定子輩基因來(lái)自于第一個(gè)父輩還是第二個(gè)父輩,交叉概率取0.8;變異參數(shù)指定算法如何通過(guò)小的隨機(jī)數(shù)創(chuàng)建變異子輩,包括高斯、均勻變異等,選擇高斯(Gaussian)函數(shù),將一個(gè)高斯分布選擇的隨機(jī)數(shù)加到父輩的變異個(gè)體中,第一代方差尺度Scale取1,方差壓縮率Shrink取1。通過(guò)遺傳算法迭代,選取最后一代種群的最佳個(gè)體,解碼后將對(duì)應(yīng)的權(quán)值和閾值代入BP網(wǎng)絡(luò)進(jìn)行進(jìn)一步網(wǎng)絡(luò)訓(xùn)練。
2.4 系統(tǒng)辨識(shí)算法
在MATLAB中編寫(xiě)遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)系統(tǒng)辨識(shí)程序,代碼如下:
1)遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)主程序。

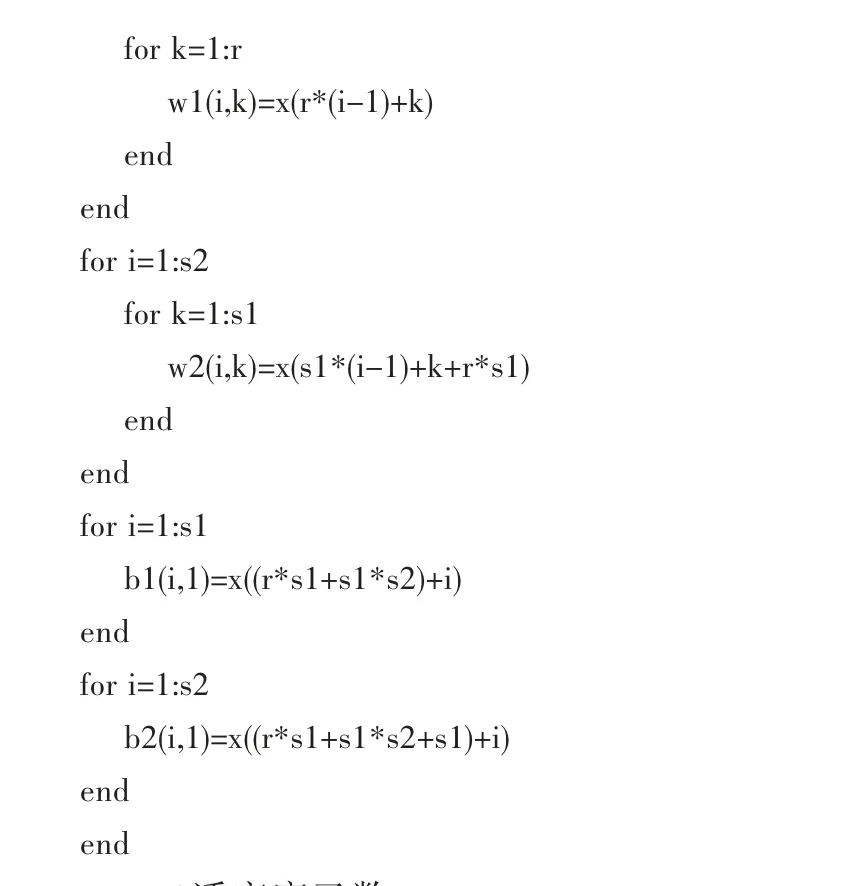
2)編碼函數(shù)程序。
將遺傳算法個(gè)體編碼為神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值。

3)適應(yīng)度函數(shù)。
對(duì)每一代的種群進(jìn)行編碼,計(jì)算神經(jīng)網(wǎng)絡(luò)下的適應(yīng)度函數(shù)。

3 實(shí)驗(yàn)分析
搭建單通道電液力伺服系統(tǒng)實(shí)驗(yàn)臺(tái)架,加載形式選用液壓缸硬式連接自平衡框架,測(cè)力傳感器選用10 kN,液壓缸選用20 kN,油源壓力21 MPa,電液伺服閥為19 L/min;設(shè)置控制器為單位增益;對(duì)系統(tǒng)施加周期為3.33 s的方波信號(hào),范圍為-5~+5 kN,信號(hào)采樣時(shí)間為0.01 s,獲取2664組實(shí)驗(yàn)數(shù)據(jù)。使用xlread函數(shù)將實(shí)驗(yàn)數(shù)據(jù)導(dǎo)入MATLAB工作空間,運(yùn)行系統(tǒng)辨識(shí)程序,圖5為神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),神經(jīng)網(wǎng)絡(luò)函數(shù)newff隨機(jī)將數(shù)據(jù)的70%用于訓(xùn)練,15%用于驗(yàn)證,15%用于測(cè)試,圖6為遺傳優(yōu)化BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練的性能指標(biāo)函數(shù)曲線,網(wǎng)絡(luò)訓(xùn)練至第10代時(shí)網(wǎng)絡(luò)誤差已開(kāi)始收斂,驗(yàn)證數(shù)據(jù)的性能指標(biāo)函數(shù)最終為1.074×10-5。圖7為數(shù)據(jù)歸一化后系統(tǒng)實(shí)際輸出與網(wǎng)絡(luò)預(yù)測(cè)輸出的對(duì)比曲線,圖8為兩者的誤差曲線,系統(tǒng)誤差在0.06以?xún)?nèi),均方誤差為1.497×10-5。
同時(shí),借助MATLAB系統(tǒng)辨識(shí)工具箱[12],選擇線性參數(shù)模型ARMAX(線性擴(kuò)展自回歸滑動(dòng)平均模型)對(duì)系統(tǒng)進(jìn)行辨識(shí),模型階次[na nb nc nk]=[4 1 1 1],采用預(yù)報(bào)誤差法,辨識(shí)結(jié)果為:

圖6 遺傳優(yōu)化神經(jīng)網(wǎng)絡(luò)訓(xùn)練的性能指標(biāo)函數(shù)曲線

圖7 實(shí)際輸出與網(wǎng)絡(luò)預(yù)測(cè)輸出對(duì)比曲線

圖8 誤差曲線

式中:y為系統(tǒng)實(shí)際輸出;y′為系統(tǒng)辨識(shí)輸出;mean表示求系統(tǒng)實(shí)際輸出的平均值;norm表示求向量的2-范數(shù)。
計(jì)算得到遺傳優(yōu)化神經(jīng)網(wǎng)絡(luò)模型擬合度值為99.5%,ARMAX模型擬合度值為86.04%。擬合度越高,系統(tǒng)辨識(shí)的結(jié)果越好,系統(tǒng)辨識(shí)輸出值越接近實(shí)際輸出值。
4 結(jié) 論
1)基于BP神經(jīng)網(wǎng)絡(luò)系統(tǒng)辨識(shí)建模方法不需了解系統(tǒng)內(nèi)部機(jī)理,較機(jī)理建模法效率更高。
2)遺傳算法的全局隨機(jī)搜索能力有效解決了單純BP神經(jīng)網(wǎng)絡(luò)收斂速度慢、易陷入局部極小的問(wèn)題,提高了算法的魯棒性、適用性。
3)遺傳優(yōu)化神經(jīng)網(wǎng)絡(luò)辨識(shí)模型較ARMAX模型辨識(shí)結(jié)果精度更高,適應(yīng)性更強(qiáng),為系統(tǒng)控制策略的改進(jìn)和設(shè)計(jì)奠定了良好的基礎(chǔ)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
