坡度道路上汽車主動避撞策略與仿真驗證
2020-12-24 07:50:54鄧國紅謝川人楊鄂川
重慶理工大學學報(自然科學) 2020年11期
鄧國紅,謝川人,徐 澤,楊鄂川
(重慶理工大學 a.機械工程學院;b.車輛工程學院,重慶 400054)
近年來,由于國內汽車工業的飛速發展,汽車保有量的不斷增加,導致道路交通安全形勢嚴峻。2016年公安部統計數據表明,全年國內發生交通事故21萬多起,死亡人數約6.31萬人,產生的經濟損失高達12.08億元[1]。美國高速公路管理局NTHSA調查結果表明,大約90%的交通事故是由駕駛員操作不當所致[2]。汽車主動預警/避撞系統(collision warning/collision avoidance,CW/CA)綜合利用現代信息技術、傳感技術,能夠提前預見碰撞危險,并向駕駛員發出警告。如果駕駛員對避撞系統發出的警告信號未正確應對,那么系統將接替駕駛員采取主動制動的方式實現避撞或減輕碰撞的程度。IIHS(美國高速公路安全保險協會)研究指出,車輛若配置基礎的輔助駕駛系統能夠避免超過60%的交通事故[3]。
在以往的主動避撞系統研究中,主動避撞策略的開發主要針對水平路面,主動避撞系統性能測試也主要選擇在水平路面上,并未考慮坡度路面。由于車輛本身動力學和道路坡度的影響,基于水平路面設計的主動避撞策略也許并不適用于坡度路面[4]。由于我國道路存在大量的坡道,在坡道上運用牛頓運動學定律計算碰撞危險判定指標TTCP,可以充分利用車輛的行駛信息和道路環境信息,來準確評估當前的碰撞危險程度。同時對車輛避撞條件分析引入了預警門限值Tw。基于TTCP和Tw設計了符合坡度路面的主動預警/避撞策略,考慮不同的道路坡度,在Carsim/Simulink聯合仿真環境中對該策略進行仿真,檢驗策略的有效性。
1 危險目標分類
自車在行駛過程中,安裝在自車前端的探測器能夠探測到周圍多數目標的運動信息,但是在當前的行駛環境中,大部分目標信息對自車運行并不構成威脅。因此,當探測器將目標信息傳輸給控制器之后,控制器必需能迅速、準確地從所有接收的目標信息中篩選出對自車行駛安全有威脅的主目標[5]。
圖1建立了車輛5車道行駛環境俯視圖,圖中有9輛正在行駛的車輛,其中有5輛在自車雷達探測范圍內。在t時刻,如圖1(a)所示,此時將同車道內正在行駛的A車作為主目標。在t1時刻,如圖1(b)所示,由于相鄰左車道的B車即將變道行駛,而相鄰右車道的C車已經變道,所以此時對自車行駛安全有危險的主目標為C車。總之,根據“同車道最近車”原則,自車會把同車道正前方最近車輛視為危險目標,相鄰車道車輛視為潛在危險目標,其他車輛視為非危險目標[6-7]。
將車輛寬度設為L,車道寬度設為L1,相鄰車道車輛車頭到自車中心線的距離為Si,雷達探測范圍內各目標的方位信息為 Pi(di,vi,θi),將圖 1中的(b)圖放大如圖2所示。危險目標分類算法為:當時,定義該目標為危險目標,此時應該將該目標作為主目標;時,定義該目標為潛在危險目標,以右車道C車為例,如果此時C車靠近自車所在車道,將會逐漸演化為危險目標;當 Si=di·時,定義該目標為非危險目標。
2 車輛避撞條件分析
車輛要實現避撞,必需考慮2個關鍵的因素,分別為駕駛員反應時間和不同工況下駕駛員的制動減速度。其中駕駛員反應時間主要包括大腦信息加工時間、釋放油門踏板時間和踩下制動踏板時間。ZHANG Yizhen[8]統計了100名駕駛員在自然條件下的避撞反應時間,統計數據如表1所示,通過對數據進行分析,得出駕駛員的平均自然反應時間為1.33 s,方差為0.27。同時隨著駕駛員年齡的增大,避撞反應時間也增加。
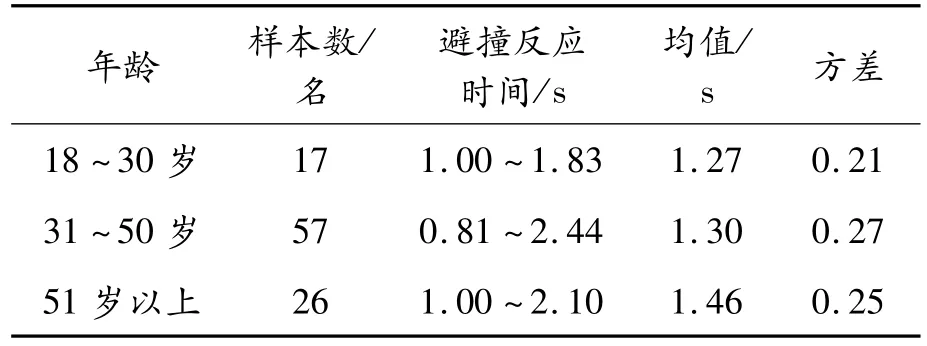
表1 不同年齡駕駛員自然避撞反應時間
當車輛配備碰撞預警輔助系統時,駕駛員反應時間明顯低于駕駛員自然反應時間。表2為不同預警信號下駕駛員反應時間,從表中可以看出,聲光預警作用下,駕駛員平均反應時間僅為0.9 s,而在聽覺預警和視覺預警作用下,駕駛員平均反應時間分別為0.99 s和1.13 s。由此可見,存在碰撞預警輔助時,駕駛員避撞反應時間會明顯縮短,聲光預警效果更明顯[8]。
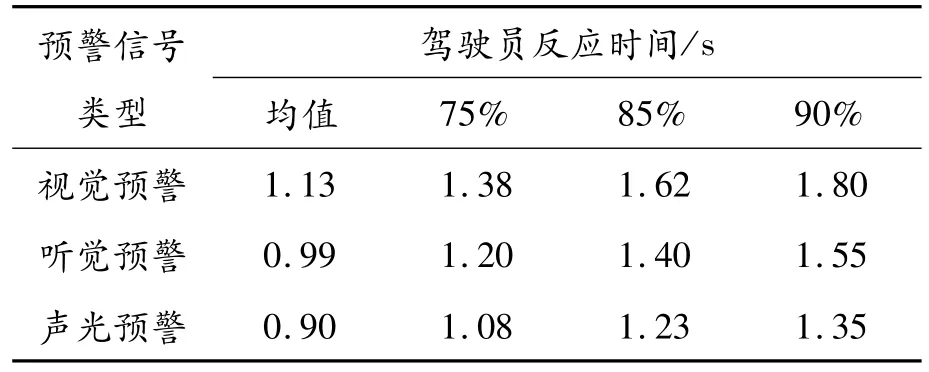
表2 不同預警信號下的駕駛員反應時間
制動減速度為當前工況下駕駛員對碰撞危險程度所采取的制動強度。美國高速公路管理局(NHTSA)在不同工況下對多名駕駛員進行測試,得出了不同駕駛員的制動避撞數據,如表3所示。對該數據進行分析,可以得出駕駛員制動時的制動減速度均值為 0.38g[9]。
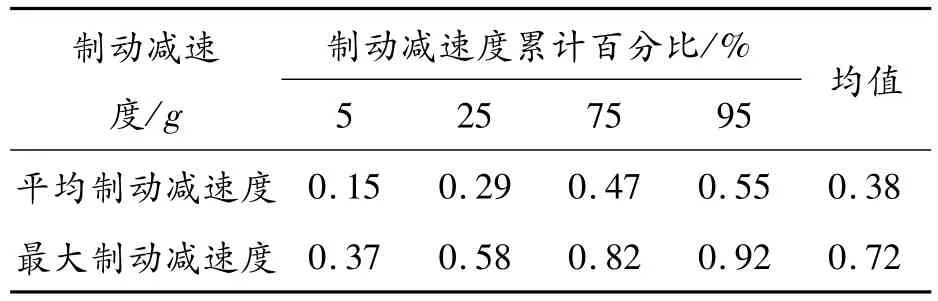
表3 駕駛員制動減速度統計
車輛能否有效避撞,除了考慮駕駛員反應時間和制動減速度外,還需要考慮車輛本身制動系統反應時間和制動器起作用時間。制動系統反應時間為踏板克服自由行程和制動器間隙所需的時間之和,主要與車輛自身結構有關,液壓制動系統的反應時間為0.015~0.03 s,此時車輛仍以原狀態行駛;制動器起作用時間為輪缸建立壓力所需的時間,液壓制動系統起作用的時間為0.15~0.3 s,這段時間汽車減速度逐漸增加[10]。
3 主動預警/避撞策略設計
3.1 基于TTC值的主動制動避撞策略
碰撞時間TTC(time to collision)模型的避撞邏輯為:如果TTC值小于駕駛員反應時間和制動器制動延遲時間之和,駕駛員并未采取正確的方式進行應對,那么系統會立即接替駕駛員對車輛進行控制,采取增大制動主缸壓力等措施來避免或減輕碰撞。圖3為一個傳統的駕駛場景,后車為自車,x1、x2分別為自車和前車當前所在位置。
則TTC值可以由下式計算:
式中:xrel(xrel=x1-x2)為自車和前車的相對距離,vrel(vrel=v1-v2)為自車與前車的相對速度,arel(arel=˙v1-˙v2)為自車與前車的相對加速度[11]。
3.2 基于TTCP值的主動制動避撞策略
3.2.1 危險判定指標
危險判定指標能定量地反映出當前工況下留給主動避撞系統實現避撞操作的時間余量,因此可以直接作為主動避撞系統的有效判據。由于車輛在坡道上運動時受到坡度i的影響,將引起地面附著力的變化,造成加速度的變化,從而影響車輛的制動效能。目前大多數的主動避撞算法并未考慮坡度i對車輛避撞的影響。筆者通過分析車輛在坡道上的運動學特性,將坡度i引入進行危險判定指標的設計,用以提高車輛在坡道環境下的主動避撞效能。車輛在坡道上的受力簡圖如圖4所示。
根據車輛在坡道上的受力簡圖,定義新的碰撞危險判定指標TTCP:
式中:i為道路坡度;v1為自車速度;a1為自車最大制動減速度。
車載DGPS接收機水平定位精度為8 mm,高程定位精度為15 mm,水平速度精度優于0.1 km/h,道路坡度θ可由車載DGPS接收機實時獲取。不同坡度環境下TTCP值的計算方法如式(3)~(8)所示。
式中:vxDGPS、vyDGPS和vzDGPS分別為車載DGPS實時獲取的橫向、側向和垂向速度;Fφ為地面附著力;m為整車質量;g為重力加速度;φ為地面附著系數;Tφ為制動時間;Sφ為制動距離。
3.2.2 主動制動避撞策略設計
在坡度條件下,危險判定指標TTCP作為車輛避撞的有效判據,能夠直接應用于主動避撞邏輯設計,圖5為所設計的主動避撞邏輯。當前方目標速度突然驟減或突然出現障礙物時,駕駛員由于部分原因并沒有采取及時有效的方式進行應對,當TTC值小于TTCP值時主動避撞系統將立即接管車輛控制權,增大主缸制動壓力,實現車輛避撞或減少碰撞的程度。
由于主動避撞系統一旦觸發會嚴重影響駕駛員的正常駕駛,因此系統觸發信號必需是真實可信的。為避免主動避撞系統被誤觸發,在仿真模型中設計了一個3次檢測系統,用于檢測主動避撞觸發信號,只有當信號連續多個值同時滿足主動避撞的條件時,主動避撞系統才觸發,提高算法穩定性[12-13]。3次檢測系統流程如圖6所示,n為當前時刻,通過傳感器數據采集計算TTCP和TTC,只有連續3個時刻的TTC<TTCP時,主動避撞系統才被觸發;若有一個時刻不滿足條件,將返回第3步重新計算TTCP和TTC。當信號滿足主動避撞系統觸發條件時,主動避撞系統介入,則需要極大的制動減速度始終作用于車輛,直到車輛停止運動[6]。由于車輛在坡道上運動時,路面附著力相比于水平直道更小,車輛的制動效能更低,為了在緊急情況下能有效避撞或最大程度地減輕碰撞,當避撞系統觸發后,車輛直接以最大制動力制動,直至自車停止。
駕駛員作為車輛的優先控制者,當主動避撞系統觸發后直至車輛停止的任何時刻,若駕駛員自行采取制動或加速措施避撞(踏板閾值設為20%),主動避撞系統將立即解除對車輛的控制,從而確保駕駛員對車輛的優先控制權。
3.3 主動避撞預警策略設計
車輛在行駛過程中,若駕駛員預先1~2 s意識到碰撞危險且以正確的措施應對,則能夠實現有效避撞,因此預警策略設計的合理性是駕駛員能否有效避撞的關鍵[2]。預警策略最重要的是預警時機的選擇,預警時機要求適應多數駕駛員的避撞特性。為了合理地確定預警時機,筆者通過對車輛避撞條件進行分析,定義預警門限值Tw:
式中:ab、tp和tb分別為駕駛員制動過程平均減速度、駕駛員避撞平均反應時間和制動器起作用時間。
預警時機要求駕駛員有一定反應時間的情況下,能保證駕駛員在接收到預警信號后有足夠的時間采取有效的制動措施避免與前方車輛發生碰撞。同時,預警時機還需考慮車輛本身制動系統起作用時間,通過綜合考慮以上因素,建立預警門限值Tw計算(如式(10)所示)。當 TTC<Tw值時,將通過聲光預警的方式提醒駕駛員實現避撞或減少碰撞的程度。
式中:駕駛員制動減速度ab取0.38g,駕駛員反應時間tp取0.9 s,制動器起作用時間tb取0.33 s。
主動預警/避撞策略流程如圖7所示,各流程最終返回到第3步,進行各主要變量計算,之后重新進入下一流程,如此循環。
4 仿真分析
自車選用Carsim2016.1中C-Class Hatchback 2012,同車道前車選用D-Class SUV V9。以同車道最近前車作為危險目標,參照E-NCAP(歐洲新車安全評鑒協會)關于自動緊急制動系統(autono-mous emergency braking system,AEB)的測試方法,同時基于我國《公路工程技術標準》中對于坡度的規定,選用前車靜止的CCRs城郊工況、前車慢行的CCRm工況和前車緊急制動的CCRb城郊工況,道路坡度分別為0、5%、7%和9%,通過Carsim/Simulink聯合仿真來檢驗避撞策略的有效性。
4.1 不含坡度工況
4.1.1 前車靜止工況(CCRs)
策略檢驗結果如圖8所示,自車以50 km/h的速度勻速行駛,兩車相距100 m,路面附著系數0.85。2.47 s時,TTC<Tw,預警系統發出預警信號,提醒駕駛員采取措施應對即將發生的碰撞危險。由于仿真設置未考慮駕駛員操作,自車仍以原速勻速行駛,兩車逐漸靠近,TTC值則逐漸減少。6.24 s時,經過3次檢測系統檢測,TTC<TTCP,主動避撞系統介入,施加10 MPa的制動壓力,制動減速度為8 m/s2,相對速度和相對距離仍逐漸減少。7.82 s時,相對速度減少為0,此時相對距離最少為4.34 m,成功避撞,危險狀態解除,卸載制動壓力。
4.1.2 前車慢行工況(CCRm)
策略檢驗結果如圖9所示,自車以65 km/h的速度勻速行駛,前車以20 km/h的速度勻速行駛,兩車相距100 m,路面附著系數0.85。3.52 s時,TTC<Tw,預警系統發出預警信號,提醒駕駛員采取措施應對即將發生的碰撞危險。由于仿真設置未考慮駕駛員操作,自車仍以原速勻速行駛,兩車逐漸靠近,TTC值則逐漸減少。7.11 s時,經過3次檢測系統檢測,TTC<TTCP,主動避撞系統介入,施加 10 MPa的制動壓力,制動減速度為8 m/s2,相對速度和相對距離仍逐漸減少。8.72 s時,相對速度減少為0,此時相對距離最少為1.52 m,成功避撞,危險狀態解除,卸載制動壓力。由于前車仍以20 km/h的速度勻速行駛,當前車停止后,兩車相對距離逐漸增大,相對速度為20 km/h。
4.1.3 前車制動工況(CCRb)
策略檢驗結果如圖10所示,開始時自車與前車皆以50 km/h的速度勻速行駛,兩車相距40 m,路面附著系數0.85。3 s時前車以-6 m/s2的制動減速度制動,5.32 s時前車停止。4.64 s時,TTC<Tw,系統發出預警信號,提醒駕駛員采取措施應對即將發生的碰撞危險。由于仿真設置未考慮駕駛員操作,自車仍以原速勻速行駛,兩車逐漸靠近,TTC值則逐漸減少。6.05 s時,經過3次檢測系統檢測,TTC<TTCP,主動避撞系統介入,施加10 MPa的制動壓力,制動減速度為8 m/s2,相對速度和相對距離仍逐漸減少。7.93 s時,相對速度減少為0,此時相對距離最少為2.62 m,成功避撞,危險狀態解除,卸載制動壓力。
4.2 含坡度工況
4.2.1 前車靜止工況(CCRs)、道路坡度5%
策略檢驗結果如圖11所示,自車以50 km/h的速度勻速行駛,兩車相距100 m,路面附著系數0.85。2.05 s時,TTC<Tw,預警系統發出預警信號,提醒駕駛員采取措施應對即將發生的碰撞危險。由于仿真設置未考慮駕駛員操作,自車仍以原速勻速行駛,兩車逐漸靠近,TTC值則逐漸減少。5.91 s時,經過3次檢測系統檢測,TTC<TTCP,主動避撞系統介入,施加10 MPa的制動壓力,制動減速度為8 m/s2,相對速度和相對距離仍逐漸減少。7.74 s時,相對速度減少為0,此時相對距離最少為2.54 m,成功避撞,危險狀態解除,卸載制動壓力。
4.2.2 前車慢行工況(CCRm)、道路坡度7%
策略檢驗結果如圖12所示,自車以65 km/h的速度勻速行駛,前車以20 km/h的速度勻速行駛,兩車相距100 m,路面附著系數0.85。3.18 s時,TTC<Tw,預警系統發出預警信號,提醒駕駛員采取措施應對即將發生的碰撞危險。由于仿真設置未考慮駕駛員操作,自車仍以原速勻速行駛,兩車逐漸靠近,TTC值則逐漸減少。6.34 s時,經過3次檢測系統檢測,TTC<TTCP,主動避撞系統介入,施加10 MPa的制動壓力,制動減速度為8 m/s2,相對速度和相對距離仍逐漸減少。7.99 s時,相對速度減少為0,此時相對距離最少為4.54 m,成功避撞,危險狀態解除,卸載制動壓力。由于前車仍以20 km/h的速度勻速行駛,當前車停止后,兩車相對距離逐漸增大,相對速度為20 km/h。
4.2.3 前車制動工況(CCRb)、道路坡度9%
策略檢驗結果如圖13所示,開始時自車與前車皆以50 km/h的速度勻速行駛,兩車相距40 m,路面附著系數0.85,3 s時前車以-6 m/s2的制動減速度制動,5.32 s時前車停止。4.52 s時,TTC<Tw,系統發出預警信號,提醒駕駛員采取措施應對即將發生的碰撞危險。由于仿真設置未考慮駕駛員操作,自車仍以原速勻速行駛,兩車逐漸靠近,TTC值則逐漸減少。5.92 s時,經過3次檢測系統檢測,TTC<TTCP,主動避撞系統介入,施加10 MPa的制動壓力,制動減速度為8 m/s2,相對速度和相對距離仍逐漸減少。7.77 s時,相對速度減少為0,此時相對距離最少為2.94 m,成功避撞,危險狀態解除,卸載制動壓力。
5 結論
通過分析車輛在坡道上的運動學特性,基于不同車輛方位信息對危險目標進行分類,考慮不同坡道上車輛的最大制動減速度,運用牛頓運動學定律計算了危險判定指標TTCP,同時對車輛避撞條件進行分析,引入了預警門限值Tw,以TTC值為判定條件,設計了一種新的主動預警/避撞策略。參照E-NCAP關于自動緊急制動系統的測試方法,考慮我國《公路工程技術標準》中對于坡度的規定,在Carsim/Simulink聯合仿真環境中建模,對所提出的主動預警/避撞策略進行檢驗,仿真結果表明:所提出的主動預警/避撞策略能有效避撞,提高車輛在坡度條件下的行駛安全性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
家庭影院技術(2017年9期)2017-09-26 03:41:45
公民與法治(2016年4期)2016-05-17 04:09:26