自動駕駛汽車兩難倫理困境應對方案研究
2020-12-28 09:14:40張武舉胡澤恩
河南警察學院學報 2020年6期
張武舉,胡澤恩
(西南政法大學,重慶 401120)
一、背景介紹與問題提出
自動駕駛是汽車產業與人工智能、物聯網、高性能計算等新一代信息技術深度融合的產物,是當前全球汽車與交通出行領域智能化和網聯化發展的主要方向[1]。據估計,超過百分之九十的交通事故屬于人為因素造成,如違反交通規則、疏忽大意、操作不當等[2]。具有自動駕駛功能的汽車可以通過高度集成的自動駕駛系統代替駕駛員駕駛汽車,降低由人為因素造成交通事故的風險。據統計,2018年北京市已經為8家企業的56輛自動駕駛車輛發放了道路臨時測試牌照,自動駕駛車輛道路測試已安全行駛超過15.36萬公里。預計到2022年,北京市智能網聯車輛測試區域面積達到500平方公里、開放道路里程達到2000公里。
根據國際汽車工程師學會制定的標準,自動駕駛汽車分為L0~L5六個級別。L5級別的自動駕駛汽車可以在任何區域實現完全自主駕駛并處理各類突發情況,在任何情況下都不需要用戶介入。完全自主意味著L5級別的自動駕駛系統能夠應對其在執行駕駛任務中可能遇到的所有情形,當然也包括了某些一直困擾著人類并尚未得到定論的情況,比如“電車難題”。當自動駕駛系統完全掌握了汽車的駕駛權限時,就已經深度融入人類社會的生活當中,其所作的每一個判斷和決定都會對社會成員產生直接或間接的影響。故其需要掌握的不僅僅是汽車行駛所必備的交通規則,同時還必須了解人類社會中的道德倫理和法律規則,以確保作出的決策符合人類的基本道德倫理并且不嚴重違法。這就要求自動駕駛汽車的制造商在設計階段就將道德倫理與法律規則嵌入到自動駕駛系統的決策過程當中。
1967年,福特在討論墮胎問題時提出了電車難題,并在此基礎上演變出來無數的版本。“電車難題”是指一方的重大法益只有通過侵害其他人的重大法益才可能得以保全,此時該如何選擇的困境問題[3]。自動駕駛汽車在執行駕駛任務過程中同樣會遇到類似的情況,在某些特殊情況下并不存在一個完美的解決方式。自動駕駛汽車可能不得不進行一個選擇,并且每一種選擇都將帶來相當的損害。當這種損害嚴重到需要付出人類生命的代價時,這個選擇將會變得異常艱難,尤其是對于自動駕駛系統這樣一個人工智能系統來說。不同于單純的駕駛任務,兩難倫理困境中的選擇帶有強烈的倫理色彩,自動駕駛汽車內置的交通法規顯然不足以應對。所以,必須要解決自動駕駛汽車在面對兩難選擇的倫理困境時如何進行決策的問題。這個問題又包含了幾個小問題:(1)決策的主體是誰,具備高度智能的自動駕駛系統是否能夠代替人類作出這樣的決策;(2)決策的方式是怎樣的,在危急情境中,生命的損害已經無法避免,但誰才是犧牲者,誰又是幸運兒;(3)決策的法律后果如何,既然存在了侵害生命法益的行為,決策主體是否存在承擔刑事責任的風險。
二、倫理層面的選擇
(一)以人類為中心
任何社會都需要承認、遵循基本的倫理[4]。自動駕駛汽車作為人工智能的一種應用形式,將被廣泛地運用在社會生活當中。機器人道德不可能也不應該脫離人類道德[5]。倘若人工智能系統所作出的決策和行為不能遵循人類社會的基本倫理,那么其應用就必然會導致原有社會倫理關系的緊張。人們一直在試圖為人工智能定制一套其專屬于人工智能的倫理體系。這種嘗試最早可以追溯到阿西莫夫的機器人三大法則。三大法則的內容分別是:第一、機器人不得傷害人類;第二、必須服從人類的命令;第三、在不違背前兩條法則的前提下,保護自身的存在[6]。
除此之外,在《基地與地球》一書中,阿西莫夫還借機器人之口提出機器人不能傷害人類,也不能由于不采取行動而導致人類受到傷害[7]。阿西莫夫把“人類高于一切”深植于機器人的腦中,是一種人類中心和人本主義的體現,這種“充滿希冀的寓言”是“希望假定為至善至美的科學倫理能夠產生良好的社會政治效果”[8]。阿西莫夫的機器人法則最為重要的一點就是確立了人類在機器人與人類關系當中的主體地位,為后世人工智能倫理的研究奠定了基礎。
這種思想一直被借鑒并流傳,關于人工智能倫理的最新成果是2019年歐盟發布的《可信賴人工智能的倫理準則》(Ethics Guidelines For Trustworthy AI),當中仍然可以找到其法則精神的存在。該文件提出確保倫理目的的關鍵指南之一是確保人工智能以人為中心并規定了人工智能的四個倫理原則,分別為:(1)尊重人類自治原則;(2)預防傷害原則;(3)公平原則;(4)可解釋原則。
回到“電車難題”當中,不難發現自動駕駛系統在面對兩難困境時,無論自動駕駛系統作出何種選擇,對人的傷害結果已經無法避免。傷害的必然結果在兩難困境形成之初就已經確定,自動駕駛系統的決策并未對其產生積極的影響。此時,自動駕駛系統只能進行簡單的制動措施,才能體現其嚴格恪守了不傷害人類的基本原則。如果自動駕駛系統在兩難倫理困境中自主決策,犧牲一方,拯救另一方,那么其對被犧牲方的損害結果產生了積極推動的作用,存在違背不傷害人類原則的風險。
根據上述的推導,似乎可以得到一個結論,自動駕駛汽車在面對“電車難題”時應當以不作為的方式來避免作出可能傷害人類的決策。這與康德的“人是目的”學說結論相同,但得出該結論并非以康德的學說為基礎,也并不意味著決策過程當然地采用了某一學說。自動駕駛系統只是受限于不傷害人類原則的限制,被動地停止了兩難困境中的選擇,而非主動地選擇不作為,是其貫徹以人類為中心的表現。
(二)個人化的倫理設定
先進的科技受限于倫理,不能發揮任何積極作用,具有強大計算能力的自動駕駛系統面對緊急情況卻毫無作為。反思上述的推導過程,過分重視人工智能不能傷害人類的非犯罪原則,卻忽視了其他原則的存在。尊重人類自治原則,同樣具有極為重要的意義。人類自治意味著人類不受從屬或脅迫的影響。人類與人工智能系統交互時必須對自己保持充分有效的自我決定。人與人工智能的分工應當遵循以人類為中心的設計原則,并為人類的選擇留下有意義的機會[9]。該原則可以將人類的判斷引入人工智能的決策當中,使人工智能在實現決策的過程當中充分保證人類的決策自主權。人類的參與可以解決上文中自動駕駛汽車在兩難選擇中只能不作為的窘境。自動駕駛汽車在兩難倫理困境當中的避險行為是在執行人類的決策,是一種機械的執行行為,而非自動駕駛系統在實現某一既定目標過程中的獨立決策行為。
回到“電車難題”,仍需要確定如何確保自動駕駛汽車的決策過程可以充分尊重人類的自主權。有學者認為推行一種強制的倫理設定(mandatory ethics setting)是符合全社會成員最大利益的做法,個人化的倫理設定(personal ethics setting)將會帶來“囚徒困境”[10]。強制推行某一固定的倫理設定雖然符合功利主義對社會整體的損害最小,但存在政府對公民個人自由過度干預的嫌疑。在尊重個人權利和自由的今天,想要拋開地區、民族、文化等差異,追求純粹的功利主義推行某一固定標準是極其不現實的。人工智能系統的開發、部署和使用必須是公平的,確保個人和群體免于不公的偏見、侮辱和歧視[10]。但完全無限制的用戶個人化倫理設定可能會導致自動駕駛系統違反公平原則。用戶不合理或不道德需求可能會借此被帶入自動駕駛系統,例如對膚色、宗教、性別等的歧視。自動駕駛系統若是接受這些不合理或不道德的設定就必然違反公平原則。
既然單一的強制倫理設定和無限制的個人化倫理設定都存在不同程度的障礙,那么能否為個人用戶設置若干種合理的選擇。制造商可以在政府的監督之下為用戶提供個性化的設定選項。在滿足用戶個人需求的同時,將個人化倫理設定限定在法律可控的范圍內。確保人工智能在進行某些關鍵的決策時,能夠接受人類的引導,防止人工智能自主產生的某些決策和行為嚴重違反人類倫理。當然,在將這種權限下放到個體的同時,仍然“需要政府和非政府組織的干預,以確保那些存在被排斥風險的個人或種族能夠平等獲得人工智能的利益和機會”[10]。
三、刑法層面的規制
(一)責任主體
自動駕駛汽車在“類電車難題”情境下的決策通常會造成人身或財產的損害,那么如何確定其可能產生的刑事責任也就成了一個急需解決的問題。傳統交通肇事罪的責任主體以肇事司機為主,因為司機在駕駛過程中作出決策并控制汽車做出相應的動作。自動駕駛汽車若是交通肇事則更復雜得多。作為一個高度集成的系統,自動駕駛汽車執行駕駛任務實際上是一個多方相互配合的工作,可能涉及的主體有自動駕駛汽車制造商、通信服務運營商、監管方、車主、駕駛員、乘客等。
引發交通事故的原因也有很多,大致上可以分為人、機和環境三個方面。若是機械、環境等客觀因素造成自動駕駛汽車處于一個不得不進行避險的情境中,那么損害結果的責任均不是緊急情況下的決策和避險行為的責任,而是與產品質量、使用義務等有關的責任。自動駕駛汽車即使質量符合相應的國家標準并通過相關監管方的檢驗,也不能避免其在使用過程中可能導致的事故。客觀上制造商設計的自動駕駛系統直接參與了駕駛行為,可以說其與任何一起自動駕駛汽車導致的交通事故都有直接關聯。但這種關聯可能導致的責任可以被“被允許的危險”所阻隔。客觀歸責理論中,程序設計行為如果不屬于制造不被允許的危險,就可以直接排除歸責。自動駕駛汽車中的程序設計行為與被允許的危險這一法理相契合,只要滿足概括性的利益衡量和有立法設定的注意義務,就可以成為被允許的危險[11]。若是自動駕駛汽車本身質量存在問題,未符合法定的標準導致了交通事故,那么損害的結果將歸于制造商,仍然與避險行為的主體無關。所以在設置的情境中,自動駕駛汽車是在一個功能完備、未受任何環境不良影響的情況下,進入了一個不得不進行避險的困境,只有在這種情況下,自動駕駛汽車的避險行為才直接造成了損害結果。根據罪責自負原則,避險行為的主體需要對該行為所產生的后果承擔責任。至于構成何種犯罪或者是存在何種出罪事由,則要置于具體的情境中進行討論。
同時考慮到上文中將自動駕駛汽車的倫理設定權以某些固定選項的方式授權給個人,在選項設置合法合理的前提下,可以將可能的責任主體縮小到車輛倫理設定的個人。由于自動駕駛汽車的特殊性,駕駛員和乘客的界限可能會逐漸模糊,車主對于車輛的影響尚不確定。即使個人有權決定自動駕駛汽車的倫理設定,但究竟是由自動駕駛汽車的所有者還是使用者來決定,或者在駕駛員這一角色消解之后,由自動駕駛汽車內的人員集體決定,都有待商定。故將可能的責任主體確定為直接參與具體決策的主體,但決策的參與者仍需進一步的討論。
(二)具體情境下的刑事責任
結合自動駕駛汽車的運行環境,決策可能影響的雙方法益主體主要分為兩種情況:一是車內用戶與車外主體之間的法益選擇;二是車外主體之間的法益選擇。
車內用戶與車外主體之間的法益選擇具體情境可以描述為:用戶乘坐自動駕駛汽車,在完全自動駕駛狀態下,自動駕駛汽車即將撞上前方障礙物。以當前車速,若是直接撞擊障礙物將會嚴重威脅車內用戶的人身安全。為了避免直接撞擊障礙物,自動駕駛汽車唯一的選擇是向右側避讓。但檢測到右前方有行人,當前車速撞擊行人也將嚴重威脅行人的人身安全。那么在此種情況下,自動駕駛汽車如何進行決策就成為一個問題。
車外主體之間的法益選擇具體情境可以描述為:以不危及車內用戶人身安全或者車內無人員為前提,自動駕駛汽車在完全自動駕駛狀態下,檢測到前方有若干行人,唯一選擇是向右側避讓,但同樣檢測到右前方有若干行人。選擇向前會損害前方行人的生命,選擇向右同樣會損害右前方行人的生命。此時,自動駕駛汽車應當如何進行決策,又是否允許自動駕駛汽車根據某些因素進行選擇性避讓,例如行人的人數、行人與自動駕駛汽車所有人的特殊關系等。
上文中排除了人、機、環境三個主要因素中的機和環境兩大因素后,造成交通事故的主要因素只剩下了人。即使進入了全面自動駕駛時代,人也將是交通系統最大的潛在風險因素。同時基于對自動駕駛汽車以及相關技術(比如車用無線通信技術(1)車用無線通信技術(Vehicleto Everything,V2X)是將車輛與一切事物相連接的新一代信息通信技術,支持實現車與車(Vehicleto Vehicle,V2V)、車與路側基礎設施(Vehicle to Infrastructure,V2I)、車與人(Vehicle to Pedestrian,V2P)、車 與 云 平 臺(Vehicle to Network/Cloud,V2N/V2C)的全方位連接和信息交互。參見于潤東等著《C-V2X標準化進展與測試驗證》,《信息通信技術與政策》,2018年第7期第61頁。)的預期,在自動駕駛時代,自動駕駛系統與交通規則、交通基礎設施之間的契合程度遠高于人類。在一個完善的交通系統中,嚴格遵守規則的各方不會陷入“類電車難題”情境。“類電車難題”的出現意味著在參與交通的各方當中至少存在一方不遵守規則。而鑒于自動駕駛汽車對交通規則的絕對遵守,可以說使自動駕駛汽車陷入“類電車難題”的情境當中,必然存在至少一方是不遵守規則的人類或者人類控制下的交通工具。對于自動駕駛汽車針對其他自動駕駛汽車避險行為的避險,可以將前一避險行為視為人的行為,因為自動駕駛汽車在緊急情況下的避險決策和行為仍然受特定人的倫理設定引導。但理想狀態多是停留在理論當中,在發展的過程當中,仍需要考慮即使在各方均遵守規則時陷入“類電車難題”的情境。
考慮到人的因素是可能造成“類電車難題”的主要風險因素,同時結合被選擇雙方法益主體的分類,將具體情境分為以下五種。
圖中黑色行人標志代表不存在違反交通規則的主體,或者主體雖然存在違規行為,但該違規行為與即將出現的危險處境無關。紅色行人標志代表存在違反交通規則的主體,并且該違規行為直接或間接地促成了即將出現的危險處境。
在A、B、C情境中,自動駕駛汽車前方存在兩方行人,D、E情境中,自動駕駛汽車前方存在一方行人。結合上文對自動駕駛汽車的設定,該情境中的自動駕駛汽車不存在違規行為。假如自動駕駛汽車進行了緊急制動后,仍然侵害某一方或者雙方的法益,鑒于自動駕駛汽車并未存在違規行為,損害的發生屬于意外事件。依據《刑法》第十六條之規定,行為即使在客觀上造成了損害結果,但不存在主觀上的故意或過失,而是由不可抗拒或不可預見的因素導致的,不屬于犯罪。對于自動駕駛汽車不存在故意,應當理解為:自動駕駛系統在檢測到前方行人后并未發出繼續行駛的指令,屬于不存在直接的故意;自動駕駛系統在檢測到前方行人后發出了制動或者其他有利于減少行人損害的避險指令,屬于不存在間接的故意。對于自動駕駛汽車不存在過失,應當理解為:自動駕駛汽車在行駛過程中運行的自動駕駛系統是符合法定標準的系統,并且在整個駕駛過程中用于保障駕駛的系統持續運行且功能完善,視為不存在過失。在符合這些要求時,自動駕駛汽車即使造成了損害結果,也不屬于犯罪行為。
根據上述的分析,所有情境下自動駕駛汽車進行普通的制動所造成的損害屬于意外事件,并不屬于犯罪。但并不意味著該情境下自動駕駛汽車可以自由進行決策和避險,均屬于意外事件,不需要承擔刑事責任。當自動駕駛汽車做出了改變原有法益侵害狀況的決策和避險行為時,則意外事件可能不能作為違法阻卻事由。
這里討論兩種可能的避險決策:一是改變損害對象的決策,例如原本碰撞的對象是左側行人,自動駕駛汽車作出了改變方向撞擊右側行人的決策;二是減少損害的決策,例如原本碰撞對象是雙方,自動駕駛汽車作出了相應調整后,使碰撞對象減少為一方,以減輕損害。
1.改變損害對象的決策
改變損害對象的決策并未改變侵害法益的數量,但為了救助原本將在意外事件中可能受損一方的生命法益,而侵害了另一方的生命法益。這樣的決策侵害了被犧牲一方的生命法益,引導自動駕駛汽車作出該決策的設定者對于被犧牲一方生命法益的損害是放任的心態,屬于間接故意。顯然該決策所導致的被犧牲一方生命法益的損害已經不屬于意外事件。那么該行為是否需要承擔刑事責任,還要進一步考慮是否存在其他阻卻事由,在這里最有可能的阻卻事由是緊急避險。而該避險行為是否成立緊急避險的關鍵在于法律是否允許以犧牲他人生命的方式來實行緊急避險。傳統理論認為,任何法益均可因緊急避險的介入而做出犧牲,惟有人的生命屬于例外,因為人的生命價值是不存在差別的[12]。緊急避險造成的損害必須小于所避免的損害。為了保護一個合法權益而損害的另一個合法權益,既不能等于、更不能大于所保護的權益[13]。但是也有諸多不同的觀點,黎宏教授認為,犧牲他人生命保全自己生命的行為是法律不能控制的,是人的原始本性的一種復蘇[14]。張明楷教授認為,保護多數人生命而不得已犧牲一人的行為不屬于犯罪[15]。前田雅英教授認為,在沒有選擇的情況下,為了拯救多數而犧牲少數的行為,不具有必須處罰的違法性[16]。上述這些觀點實際上都承認在某些特殊情況下可以犧牲他人生命來進行避險。完全禁止針對他人生命的避險確實存在一定的不合理。緊急情況下,要求行為人放棄避險措施,克制自己的求生本能,犧牲自己來保全他人,這樣的行為是極其高尚的。這樣的標準可以用來評價道德高尚與否,但刑法打擊的對象不是不道德的行為,更不可能將高尚的道德標準作為刑罰的尺度。如果將這樣不夠高尚的行為認定為犯罪,既違背了人之常情,又無法實現刑罰一般預防與特殊預防的目的[17]。具體到自動駕駛汽車的緊急避險決策當中,應當承認緊急情況下車主對于自己生命的救助行為,即使這種行為可能危及第三方的生命。
根據具體情境中是否包含違反交通規則導致危險處境的行人,對五個情境進行分類討論。
在B、C情境中,均存在違反交通規則的行人,且危險處境的出現均由該行人的違規行為導致。可以引入防御性緊急避險的概念來幫助自動駕駛汽車進行避險決策。所謂防御性緊急避險,是指避險行為人為從危險之中救助自己或他人的合法權益,將誘發危險的當事人作為避險對象侵害其合法權益的情形[18]。在B、C情境中,違規方的行為直接導致了必然有法益受到侵害的危險處境。作為危險的產生方,其法益的保護性相對于完全遵守規則的無辜者的法益有所下降。這就意味著,在行為人不得已導致了危險來源者死亡的情況下,如果該行為所保護之法益的價值與生命法益相比并不存在明顯的失衡,該行為就有可能以防御性緊急避險之名獲得合法化[19]。那么在B、C情境中,不論原先路線的撞擊對象是哪一方,自動駕駛汽車經過決策后撞擊導致危險處境的違規方進行避險的行為應當得到允許。在B情境中,自動駕駛系統若是選擇撞擊非違規方,則必然不構成防御性緊急避險。如果說該情境下,必然造成生命法益的損害是由不能抗拒或不能預見的原因引起的,屬于意外事件,但在可以選擇撞擊違規方構成防御性緊急避險的情況下,選擇損害完全遵守規則的無辜方將直接導致無辜者的死亡,且不存在不可抗拒或不能預見的原因。故B情境中,選擇撞擊非違規方屬于違法行為,應當被禁止。
在A情境中,危險局面的產生純屬偶然,沒有任何一方需要對此承擔責任,也不存在某一方法益的保護性下降。面對危險的雙方都是無辜的生命,但既可能是一個人,也可能是幾個人,甚至更多的難以預測的情形。將目光聚焦在應該堅持功利主義或是自由主義上只會讓人類陷入道德困境,無助于問題的解決。不同的人在這種兩難的情境下會作出不同的判斷,這些判斷并不一定都是那么符合哲學上的原則,但卻充滿了人性的憐憫與善意。在一項針對“電車難題”的心理學研究中發現,參與測試者作出功利性道德判斷的比例均大于百分之五十,且存在強烈的惻隱之心[20]。從中可以看到張明楷教授所指的“社會一般觀念”是確實存在的。
同時,研究結果還表明功利性道德判斷的測試者比非功利性道德判斷的測試者內心更加煎熬和痛苦,更加同情設定情境中的被犧牲者[20]。這種痛苦產生的根源在于被犧牲者的傷亡與測試者的決策緊密關聯在一起,測試者清楚地知道自己的決策導致了對被犧牲者生命的侵害。第三方的決策者是否有權決定他人的生死,功利主義與自由主義有不同的選擇。但是在緊急情況下,自動駕駛系統客觀上不得不作出一個決策。在雙方均是無辜者、生命法益保護性完全相同的情況下,作出一個可能改變相關個人命運的決策是極其艱難且需要高度謹慎的。當這個決策方式被預先設定,并被社會大眾所知悉時,那么就需要加倍地謹慎。如果必須要有一個決策者,那么最有可能成為該決策者的就是危險處境中那些個人生命受到嚴重威脅的人所組成的共同體。避險的決策會直接關系到共同體內部成員的生命安全,基于對自己生命權的絕對支配,共同體內部成員均有權參與決策。在A情境下,雙方均為無辜者,其生命法益應當受到同等的保護,原則上不應當作出改變撞擊對象的避險決策,損害結果源于意外事件。如果確實存在某些特殊的情形,可以考慮危險處境中的共同體內成員通過集體決策的方式來作出改變撞擊對象的決策。
在D、E情境中,車內乘客同樣面臨生命法益受損的威脅,自動駕駛汽車需要判斷是否可以優先保護乘客的利益。博納豐(Jean-Francois Bonnefon)等人在《科學》雜志發表的論文就提出了當自動駕駛汽車面臨行人和乘客生命法益相沖突時的道德選擇困境。研究顯示大多數人都贊同通過程序設定使自動駕駛汽車對人的總體傷害降到最低,即使犧牲車上乘客的生命[21]。這樣的結果并不出乎意料,功利主義的結果大多數時候都是易被大家所接受的。但是當人們真正對自己的自動駕駛汽車進行倫理設定時,是否還能以相同的心態選擇可能導致自己犧牲的設定尚不可知。假定車主并未選擇緊急情況下功利主義的設定,而是選擇優先保護自己或者乘客的利益,那么是否屬于緊急避險?在D情境中,行人存在違規行為,自動駕駛汽車優先保護乘客可以視為防御性緊急避險行為。在E情境中,行人不存在違規行為,其生命法益的保護性與乘客相當,無法通過防御性緊急避險阻卻違法。若要使優先保護乘客利益的決策正當化,仍可以考慮攻擊性緊急避險。乘客乘坐自動駕駛汽車的行為表示其接受該車的相關倫理設定。倫理設定者雖然是車主,但當乘客接受了這種設定時,相關的設定同樣可以視為乘客的意思表達。危險處境中,自動駕駛汽車優先保護車內人員的行為可以視為乘客集體的自救行為。法律無法要求個體必須作出犧牲自己救助他人的決策,只要侵害的利益不大于所保護的利益,從整體上看具有社會相當性,就應當允許這樣的行為[22]。故在D、E情境中,自動駕駛汽車優先保護車內人員利益的行為屬于緊急避險。
進而考慮一種更加特殊的情況,自動駕駛汽車的倫理設定者(車主)與自動駕駛汽車相分離。在B、C、E情境中,車主成為情境中的違規方并直接導致了危險處境的產生。此時若自動駕駛汽車根據車主的設定作出了優先保護車主生命法益的決策,侵害第三方無辜者的法益,是否可以構成自招危險的緊急避險?違規者自招本人危險的行為同時帶來了容忍義務,使其需要在一定程度上承擔自己行為所導致的危險。在自招本人危險的情況下,只有所保護法益價值明顯大于損害法益價值時才可能構成緊急避險[23]。那么該情境中,違規方由于自己行為招致的危險使得自己法益的保護性下降。如果通過侵害無辜者的生命法益來保護違規方的生命法益,就屬于犧牲較大的法益保護較小的法益,顯然不符合緊急避險的要求。故該特殊情形不構成緊急避險。違規方的車主若通過自動駕駛汽車設定進行了保護自己的避險行為,則應承擔相應的刑事責任。同樣,在A、D情境中也可能由于車主對自動駕駛汽車的設定影響,作出優先保護車主生命法益的決策。那么在不存在犧牲大利益保護小利益的前提下,應當允許自動駕駛汽車依據車主設定作出優先保護車主生命法益的決策。
2.減少損害的決策
減少損害決策是指自動駕駛汽車原有駕駛姿態可能會同時損害雙方的生命法益,為了減少損害調整自動駕駛汽車只侵害其中某一方法益的決策。這里需要說明的是減少損害并非是指單純受損害方人數的減少,而是受損害方整體的減少。具體又可以分為兩種情況:犧牲方特定和犧牲方不特定。對于犧牲方特定的情形,損害的產生并非源自于決策帶來的避險行為,決策也沒有導致損害結果的加重或者減輕。減少損害的決策并未對損害結果產生實質上的影響,損害的發生屬于意外事件。對于犧牲方不特定的情形,損害的結果與決策確實存在一定的聯系。但減少損害的決策沒有推動危險上升的積極作用,并對損害結果產生了極力抑制作用,決策本身并未侵害任何法益。決策產生的避險行為使得本應處于危險處境中的部分個體脫離了危險處境,且并未加重未脫離危險處境個體的損害。未脫離危險處境的個體所受損害來源于意外事件,避險行為并沒有阻斷損害結果與意外事件之間的因果關系,犧牲方的死亡結果仍然歸因于意外事件。救助一方法益的行為并未侵害被犧牲方法益,故減少損害的決策及其避險行為并不具備違法性,不需要受到刑法的規制。其中涉及決策的部分,可以依據自動駕駛汽車的倫理設定進行自由選擇。
四、決策方案的設定
自動駕駛汽車與人類社會生活的高度融合,要求其決策既要合乎人類倫理,又必須嚴格限定在法律強制性規定內。對于自動駕駛汽車“類電車難題”情境中避險決策思路,應當在法律允許的范圍內,充分發揮倫理設定的作用。
(一)堅守法律底線
人工智能系統的行為要嚴格限定在法律允許的范圍內,以避免其實施犯罪行為。人類無法完全避免人工智能系統可能淪為某些人的犯罪工具。但相關智能系統在其特定領域內,應當預先設定對犯罪行為的絕對排除,這是對法治社會最基本的尊重。即使是極其輕微的犯罪,當這種許可被嵌入到人類社會不計其數的智能系統中也會導致難以估量的后果。具體到自動駕駛系統的避險決策中,當自動駕駛系統面對兩個選擇,即一個選擇構成緊急避險,另一個選擇構成交通肇事罪時,自動駕駛系統必須作出緊急避險的選擇。這樣的設定表面上限制了用戶自由決策的權力,實則是為自動駕駛汽車用戶的倫理設定排除了可能的刑事責任風險。
(二)寬容的倫理設定
寬容的倫理設定是對個人自由的充分保障。人類應該具有作出自身人身決定的自由[10]。任何組織或個人都不得將某一特定的價值觀或某些特定群體的利益強制附著于倫理設定當中。在法律允許的范圍內,用戶通過倫理設定使自動駕駛系統的部分決策成為自身意志的一個延伸。結合本文所設置的兩難選擇情境,從以下幾個方面設置倫理設定的選項。
1.優先利益的設定
根據緊急情況下所要優先保護的利益,可以設置以下幾個選項:(1)自私拒絕原則;(2)自我犧牲原則;(3)最小損害原則。這三項分別從自身利益最優先、他人利益最優先、社會整體利益最優先的角度出發,自動駕駛汽車根據用戶的設定在緊急情況下直接作出相應的決策并作出相應的避險行為。當然僅憑上述三個基本設定并不足以模擬人類在面對相同情境中復雜的利益權衡過程,這只是在利益權衡當中的三個特殊點。在其間還可以根據實際情況對利益優先的設定進一步細化,例如自私保護原則可以將利益優先的主體擴大為配偶或者家人。
在兩難的道德選擇中,不同的倫理設定體現的是用戶自身的認知以及對各方利益的權衡。但這樣的設定都隱藏了一定的倫理風險,這種風險在A情境中達到最高值。A情境中雙方生命法益的保護性完全相同,而用戶的設定將被犧牲者從本來安全的狀態引向死亡,從而換取被營救者的生命。倫理的設定者作為危險情境中的第三方,似乎掌控了危險處境中各方的生命,表面上是為了各方的利益,實則是對他人的生命隨心進行處分,這對于危險處境中的其他人來說是極其不公平的。
2.特殊的決策方式——損害自決原則
為了應對特殊情境中潛在的倫理風險,避免任何一個人的生命被他人所肆意操控,需要采用一種特殊的決策方式。既然“損害衡量的判斷就必須按照符合法益主體意思的基準而進行”[24],可以將緊急情況下的避險決策權轉移給危險處境中的所有成員。相對于第三人的決策,該共同體的決策更能體現受損法益的主體意志,盡可能使個體對其生命的支配權最大化。以傳統觀念來看,這樣的方案顯然是沒有任何價值的,因為其根本就不具備實行的可能性。緊急情況下,危險處境中的各方缺乏必要的時間、情緒等要素,不存在作出有效決策的可能性。但是信息技術的發展,該方案目前是具備一定技術基礎的,存在實行的可能。
信息的交互是作出決策并實施的基本前提。5G技術推動了物聯網的發展,萬物互聯的時代使得信息的傳輸效率大幅提高。車聯網作為物聯網的一大熱點應用,已經取得一定的技術積累。車用無線通信技術可以將車輛與一切事物相連接。以V2P技術為例,V2P是指弱勢交通群體(包括行人、騎行者等)使用用戶設備(如手機、筆記本電腦等)與車載設備進行通信[25]。在特定場景中,當汽車從發現前方有狀況到自動實施緊急制動的過程,按照最大時延和最高汽車速度計算,在20 ms的時延下,車輛的反應時間所對應的前移距離僅為0.44 m。在5G標準中將會進一步提升,其時延對應的移動距離為2.2 cm[26]。可以說車聯網的信息傳輸速率完全可以滿足在緊急情況下危險處境內部成員的信息交互。
當信息的傳輸速率足夠時,所要做的是在有限的時間內實現效率的最大化。為了保證在極短的時間內危險處境中的共同體成員能夠達成一致,可以要求個體提前簽訂避險協議。便于緊急情況下智能系統能夠迅速獲取個體意見,從而作出盡可能符合共同體意志的決策。避險協議的設置也可以按照所要優先保護的利益進行劃分,即自私拒絕原則、自我犧牲原則和最小損害原則。個人事先根據自身需求預先進行設置,并通過手機等隨身設備進行存儲和傳輸。
具體到A情境中,需要明確如何通過避險協議,快速得出共同體的避險決策。從決策結果來看,僅存在兩種可能的結果:不改變撞擊對象和改變撞擊對象。A情境中,對于按照原始路線可能的犧牲方來說,生命的損害雖然屬于意外事件,但生老病死乃人之常情,這個世界上無時無刻不在發生著這樣的悲劇。選擇的雙方都是獨一無二的生命法益,避險決策不是在避開一場悲劇的同時制造另一場悲劇。每一個生命都是無比珍貴的,具有同等的價值。不存在哪一個人的生命比其他人的生命更珍貴。任何人的犧牲都必須是其自主選擇的結果,否則就侵犯了其生命平等和神圣的尊嚴[27]。在A情境中,如果要改變撞擊對象,那么該決策必須是極其謹慎的,應當是危險處境下共同體成員意見的高度一致。所有成員的設定均為最小損害原則或自我犧牲原則,不存在任何自私拒絕原則的設定。當某一個體選擇了自私拒絕原則優先時,就意味著該成員以自身利益優先。為了防止避險決策及措施損害自身利益,拒絕通過集體決策的方式進行避險處置,那么即使存在多數方意見,也無法形成整體意志的高度一致,存在犧牲非自愿的可能,也就無法作出改變撞擊對象的決策。
這樣的決策方式仍考慮了以下幾個方面:(1)選擇自私拒絕原則意味著在任何情況下,以自身的利益優先,他人或者整體利益次之。選擇最小損害原則或者自我犧牲原則是對整體利益的一種承認,并允許在某些情況下讓渡自己的利益。當危險處境的共同體中存在任何一個個體選擇了自私拒絕原則,不論該個體處于具體危險情境中的哪一方,都意味著共同體內部無法達成對于整體利益優先的一致。那么自動駕駛汽車就不能做出改變撞擊對象的避險動作,即使不改變撞擊對象可能會造成更多的傷亡。(2)改變撞擊對象的決策對自私拒絕原則的絕對排除可以避免在設定環節出現“囚徒困境”。防止個人抱著僥幸的心態,既想在處于少數方時能夠避免成為避險行為的犧牲對象,又能在處于多數方時依靠人數的優勢取得生存的機會。(3)可以引導公眾正確理解并選擇最小損害原則。避險協議的設定是在未發生具體危險時,任何一個人都無法預測自己在可能發生的危險處境中處于哪一方。當某一個個體陷入危險處境時,處于人多一方的概率顯然要大于人少一方,選擇最小損害原則能夠提高個體在可能發生的危險處境中的存活概率。
如果說A情境下避險決策應當適用損害自決原則是因為第三方車主無權肆意操控他人的生命,而必須通過損害自決原則進行決策。那么在其他情境中,車主當然也可以放棄這種權力,并將決策權交予某個危險處境中的成員所組成的共同體。如果將A情境中的強制適用損害自決原則視作強制的損害自決原則,那么可以將設定者主動放棄決策權而選擇的損害自覺原則視為設定的損害自決原則。強制的損害自決原則將優先于自私拒絕、自我犧牲、最小損害三大原則,設定的損害自決原則與三大原則是并列關系。
五、小結
最后,對自動駕駛汽車面對兩難倫理困境如何進行決策的三個小問題:主體、方式和責任分別進行總結。
(一)決策的主體
在自動駕駛汽車的兩難倫理困境當中,人之生命被一個決策所左右。一方面,人工智能系統應當始終以人類為中心,遵循人類的意志,不得傷害人類。自動駕駛汽車不可以自主作出一個可能傷害人類的決策,這是極度危險且必須被禁止的。人工智能時代人類仍然應當保持充分有效的自我決定權,這是對自治原則的一種保障。另一方面,人類社會也不可能徹底信任人工智能。即使在L5級別自動駕駛汽車的應用階段,人們信任并愿意乘坐自動駕駛汽車出行。但這種信任是指人類相信自動駕駛系統能夠遵守交通法規,并操縱汽車安全行使,而不是左右人之生死的信任。所以在自動駕駛汽車的兩難倫理困境當中,決策的主體仍然是人類,而不可能是自動駕駛系統。
(二)決策的方式
在自動駕駛汽車的兩難倫理困境中,自動駕駛系統需要受到人類的指引進行避險操作。一般情況下,自動駕駛系統可以通過車主預先設置的倫理設定完成倫理困境中的利益判斷,作出體現車主意志的避險措施。根據設定者所期望優先保護的利益,分別有自私拒絕原則、自我犧牲原則、最小損害原則三種設定。在特殊情況下,避險決策權可以轉移給危險處境中成員形成的利益共同體,利用損害自決原則進行避險決策。避免出現第三方車主肆意左右他人生死的情況,盡可能使危險處境中的個體實現對其生命支配權的最大化。
在作出具體決策時,首先要絕對排除的是可能構成犯罪的決策。這里的可能是指該決策所指向的是違法行為,但考慮責任劃分、最終的損害結果等要素,可能在犯罪構成上不符合。其次要確定當前情境下,自動駕駛汽車需要的是改變撞擊對象的決策還是減少損害的決策。若是屬于減少損害的決策,則直接根據犧牲者是否特定,分別進行決策。若是屬于改變撞擊對象的決策,則需進一步判斷是否需要適用強制的損害自決原則。如果適用強制的損害自決原則,那么避險決策權將實現轉移。如果不屬于適用強制的損害自決原則情境,則依據相關的倫理設定作出避險決策。決策的流程如圖2所示。
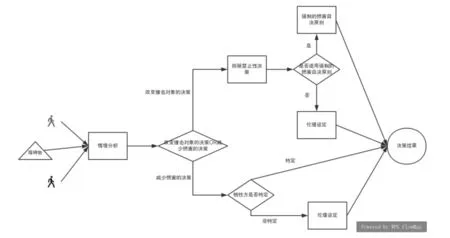
圖2 決策流程圖
(三)決策的責任
對于決策可能導致的法律責任問題,首先要考慮的就是決策的類型。減少損害決策,不僅沒有積極推動危險,還極力阻礙損害結果的產生。避險行為并沒有阻斷損害結果與意外事件之間的因果關系,最后的損害結果來源于意外事件,對于其他避險決策所導致的損害結果,則要考慮具體情況下實施的避險行為是否存在阻卻事由,如表1所示。
根據上述結論,在兩難倫理困境中,自動駕駛汽車存在一種絕對禁止的避險決策。在大多數情況下,自動駕駛汽車均可以根據相應的倫理設定作出避險決策,且不存在承擔刑事責任的風險,肯定了自動駕駛汽車依據個人倫理設定進行避險決策的思路在法律層面上的可行性。
人工智能時代的到來已經成為無法改變的歷史趨勢,如何接受和適應人工智能時代所帶來的改變對于每一個學科來說都是一個巨大的挑戰。自動駕駛汽車很可能是第一個被廣泛應用到社會生活當中的人工智能產品,面對這種改變,刑法為其劃定禁區的同時,需要給予技術足夠的發展空間。“電車難題”是一個涉及倫理、道德、人性等各方面的綜合題,現階段這個難題還沒有完美的解決方案,但社會的發展不可能因為一個難題而停滯不前,技術的進步不能夠受制于此。擱置難題,建立決策機制,明確法律責任,才是自動駕駛汽車在兩難倫理困境中的應對之道。
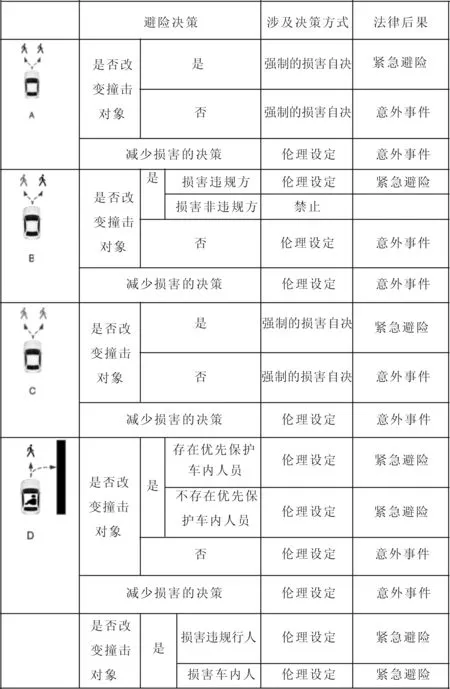
表1 具體情境下的決策方式及法律后果
猜你喜歡
福建中學數學(2023年5期)2024-01-25 17:41:36
中學生數理化·中考版(2022年10期)2022-11-10 09:37:46
大科技·百科新說(2021年6期)2021-09-12 02:37:27
好孩子畫報(2020年5期)2020-06-27 14:08:05
意林·全彩Color(2019年6期)2019-07-24 08:13:50
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
護士進修雜志(2017年3期)2017-02-14 07:19:35
小學生作文(中高年級適用)(2016年3期)2016-11-11 06:30:23
作文大王·低年級(2016年4期)2016-04-18 00:24:37
奧秘(2015年2期)2015-09-10 07:22:44