光伏發電控制策略研究
2021-01-03 22:43:14宋梓豪
中國新通信 2021年20期
宋梓豪




【摘要】? ? 隨著環境的污染與常規能源的短缺,各國相繼把目光投向可再生能源,而太陽能憑借其無污染、儲量足、便于開發的特點逐漸成為研究的重點。本文以單相光伏并網發電系統為研究對象,對光伏電池的光伏特性、Boost升壓技術、最大功率點跟蹤(Maximum power point tracking,MPPT)技術、逆變器控制技術展開了深入的研究。
【關鍵詞】? ? 光伏并網發電? ? 光伏特性? ? MPPT? ? 逆變
引言:
隨著現如今全球經濟的不斷增長,中國的經濟增長模式逐漸趨于多樣化,在這個倡導“綠水青山就是金山銀山”的時期,可持續發展成為了當今中國經濟發展的主旋律,以光伏發電為代表的新能源利用方式正成為各國能源和環境可持續發展的突破點,在各類光伏發電中光伏并網發電由于其獨特的優越性成為研究的重點。本文全面而系統地研究了光伏電池的輸出特性、Boost升壓電路、MPPT控制、逆變器控制技術。
一、光伏電池模型與仿真分析
對光伏電池的單指數模型進行相關假設和定義,可以得出簡單的光伏電池的工程應用模型如式(1):
考慮到實際情況中溫度、光照變化的影響,對上述的簡化工程實用模型進行修正。引入修正量ΔT、ΔS,將式(1)做以下修正:
其中公式推導中a、b、c為環境補償系數,為各等式中的環境補償系數,仿真過程中通過調整環境補償系數a、b、c來減小模型的誤差。根據修正后的光伏組件工程實用模型,在不同環境條件下對光伏組件的輸出特性進行仿真分析:1.控制溫度不變為26℃,光照強度分別取為1000W/m2、800W/m2、600W/m2和400W/m2,然后觀察P-U曲線與I-U曲線。2.控制光照強度保持1000W/m2不變,溫度分別取26℃、36℃、46℃、56℃,觀察其P-U曲線與I-U曲線。由具體實驗結果顯示,光伏組件受光照因素的影響較大,光照強度越大,輸出功率也越大,且輸出功率的變化幅度比其受溫度影響大,并且隨著溫度的升高,光伏組件的輸出功率反而略微下降。
利用實驗室資源,測試STP150S-24c/AC太陽能電池板在不同遮陰情況下的輸出特性,分析其在無遮擋與兩遮擋情況下的曲線擬合圖,可以看出,局部陰影情況下,光伏組件的輸出功率明顯降低,與仿真效果類似,證明所選模型的準確性。
二、基于Boost電路的MPPT控制研究
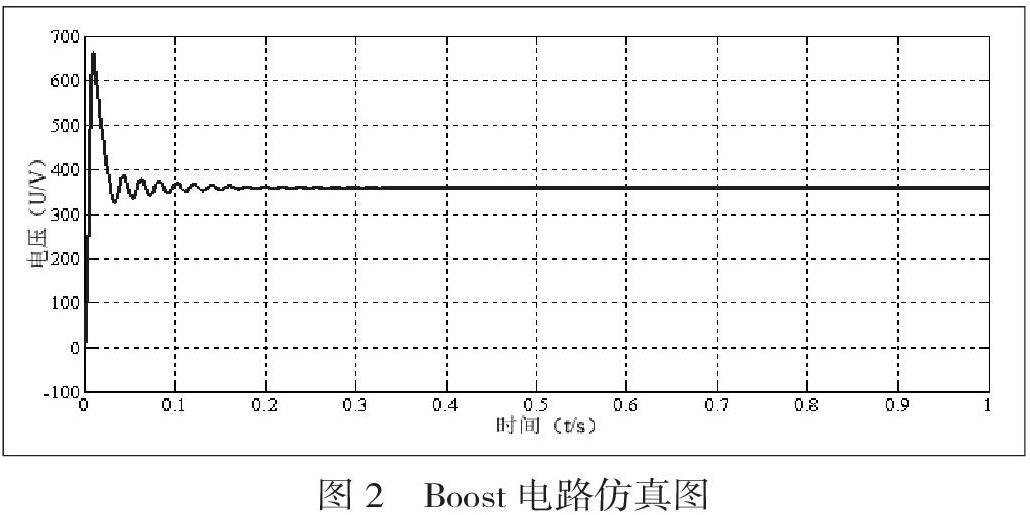
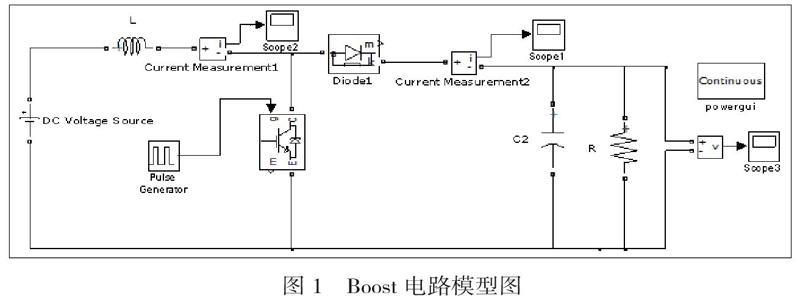
首先,對Boost電路進行參數設計。主要包括電感L、輸入端電容C1以及濾波電容的設計。電感L的參數設計主要在于臨界連續電流的求取,并依此求出臨界狀態的電感值;在Boost電路穩定工作于電流連續狀態時,可以求出電感紋波電流的峰值,利用輸入端電容C1與電感相互傳遞能量進而可以求出C1;濾波電容的設計相對簡單,選取足夠大的電容即可保證較小的輸出電壓紋波以穩定電壓輸出。選取輸入電壓Ud=200V,要求提升輸出電壓至Uo=360V,同時負載電阻R=7Ω。取脈沖發生器的開關周期為T=0.01ms。經過計算結合實際電路選取電感值L=1mH,輸出濾波電容C2=400μF[3]。在MATLAB中搭建模型如圖1所示,仿真圖如2所示。
由圖2可以看出所搭建的電路經過Boost電路升壓后符合最后電壓達到360V的要求。
三、光伏并網逆變器控制策略的方法研究
光伏發電系統是將太陽能電池板吸收的光能通過光電效應初步轉化為電能,再通過各種電力電子元器件經過整流、升降壓等轉換為諧波小且穩定的正弦交流電,最終并入電網的一套發電系統。光伏發電系統中逆變器需需滿足以下控制目標:并網電流與電網電壓同頻同相,與此同時,還要求整個系統最大限度地將太陽能轉化為電能,即時刻工作在最大功率點處。常用的為電壓源電流控制的方式。下面將對逆變器的參數設計、控制方式作簡要介紹。
首先,逆變器的參數設計主要包括濾波電感與直流母線電容的設計。濾波電感的設計要考慮到體積成本、控制要求以及最值的限制,在電感電壓最大且電感紋波最大時L取得最小值,在逆變電路最大輸出時L取得最大值;直流母線電容的設計取決于電容兩端電壓的紋波。本文濾波電感取500μH,直流母線電容取4.7mF,然后選取數字PID控制與無差拍控制對逆變器進行相關控制研究。具體研究成果如下:
3.1數字PID控制模型搭建
與一般PID控制不同,數字PID控制是利用DSP及一些數字芯片實現對系統進行控制的一種方式,其實質也是通過正弦脈沖波寬度調制比較控制的一種,但與傳統模擬PID控制方式相比,數字PID控制方式不論在響應速度上還是在跟蹤精度上都遠優于普通PID控制方式。
圖3為在Matlab軟件中搭建的數字PID模型,仿真過程中,DSP及一些數字芯片一般采用離散化采樣方式對數據進行處理,各仿真模塊參數設置如下:系統中調節器采用PI,Kp設置為75,Ki設置為15。仿真系統模型中將離散系統的采樣周期Ts設定為5e-6s,直流側模塊電壓為設為400V,電網電壓為220V/50Hz的標準正弦波,電容C設計為312.6uF,電感L設計為7.8734mH,電阻R設計為5Ω。圖4為數字PID中的PWM控制模塊封裝。與傳統數字PID不同,本文在系統仿真過程中在PID調節輸出后進行了局部的改進,如圖3中的黑色模塊V2所示,通過引入電網電壓和直流電壓的反饋對系統誤差進行修正,反饋的修正信號再次通過PWM發生器進而產生所需的控制脈沖波,PWM發生器模塊中的采樣頻率設定為25kHz。
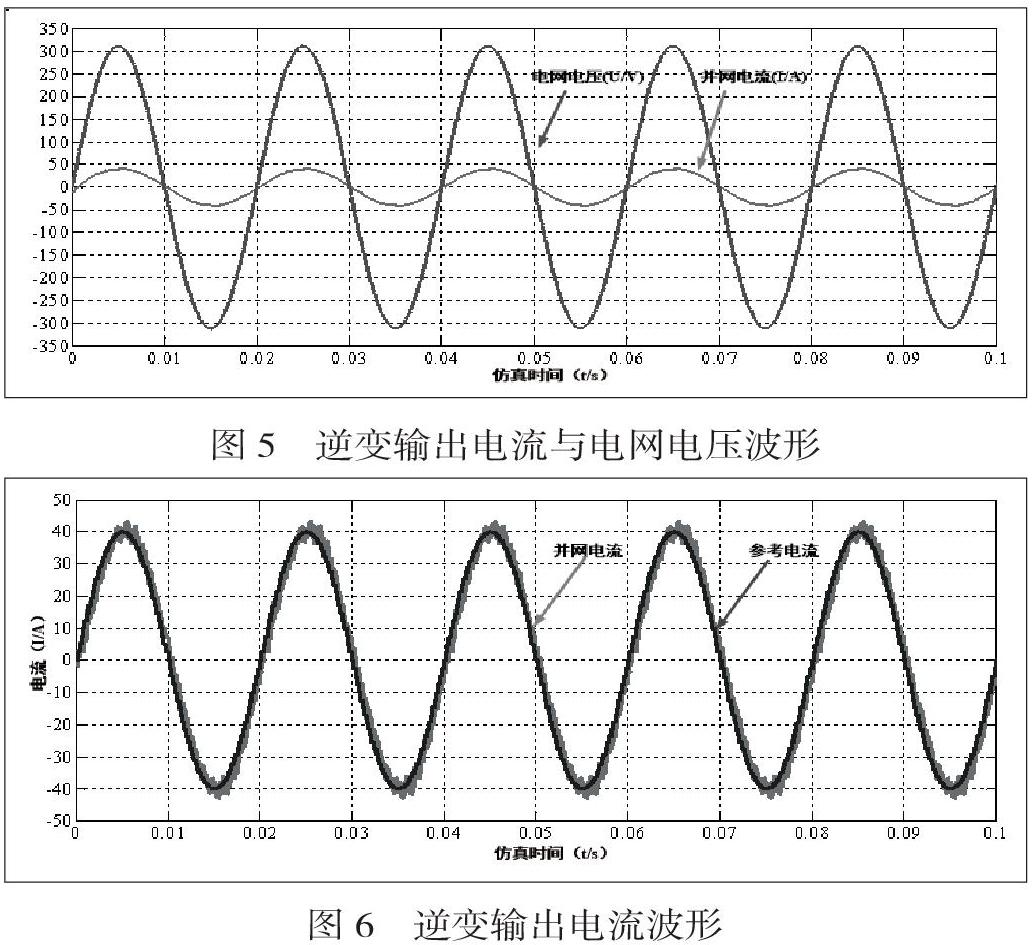
圖4.3為電網電壓與逆變輸出的并網電流波形,圖4.4為逆變輸出的并網電流與參考電流波形。通過對圖4.3、圖4.4中的輸出波形可以看出,改進后的數字PID控制方式輸出的并網電流跟蹤特性很好,但并網電流與參考電流卻存在一定的相位差,總體諧波畸變率(THD)為1.09%,誤差率也小于5%,基本滿足并網條件。
3.2無差拍控制模型搭建
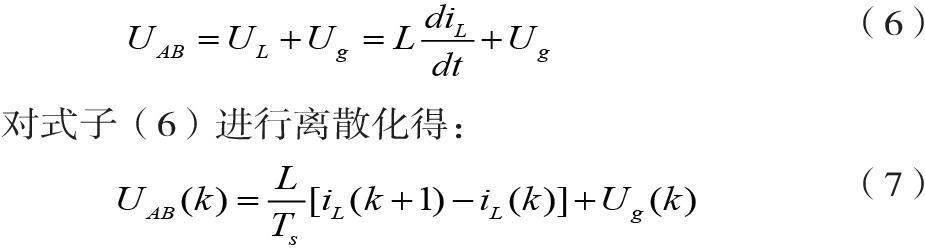
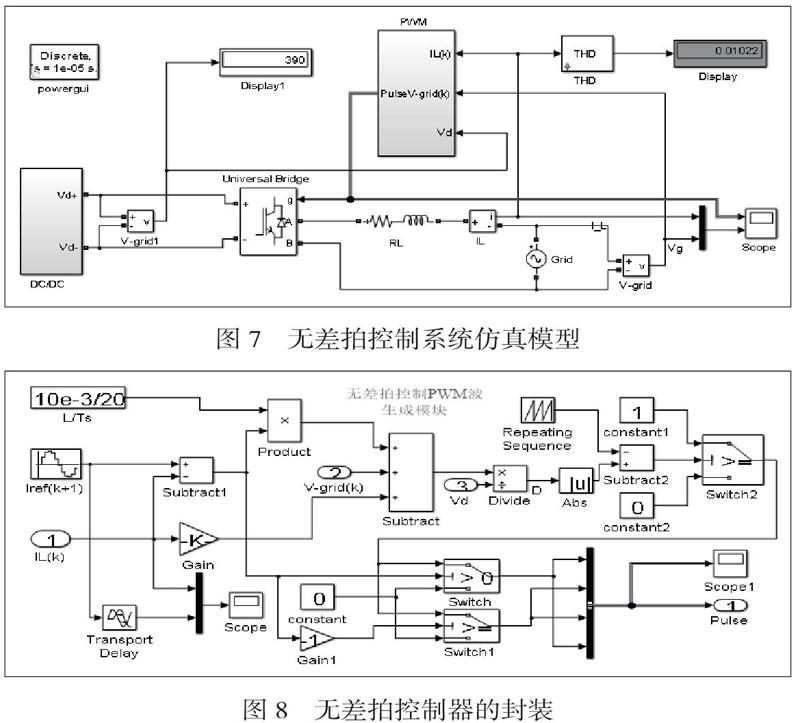
圖7為搭建的無差拍控制仿真系統,公式(6)為系統中逆變器輸出端的電壓方程式:
對式子(6)進行離散化得:
無差拍控制模型的搭建首先通過將如下控制電流的數學表達式(6)進行離散化得到(7),同時對主電路的建模盡量做到精確以滿足更好的控制需要。當電路穩態運行時,流經電容所在支路的電流iC非常小,因此直接忽略,同時,因為流經電容支路的電流iC的值很小(iC近似認為為0)并網電流也很小,此時并網電流ig=iL;將給定參考電流iref (k+1)替換掉電感電流iL(k+1),從而獲得采樣周期內對應的逆變器輸出電壓平均值如下:
為了得到無差拍控制器的數學模型,對式(8)進行搭建模型,圖8為無差拍控制器封裝模塊。模型中各參數如下:仿真離散系統的采樣周期設定為5e-6s,電容C設計為332.8uF,開關管頻率設定為20kHz,濾波電感L設計為7.4560mH,電容的阻抗電阻R設計為0.01,電網電壓為標準電壓,幅值為311V,參考電流設置為40A/50Hz,相位始終超前一個采樣周期。
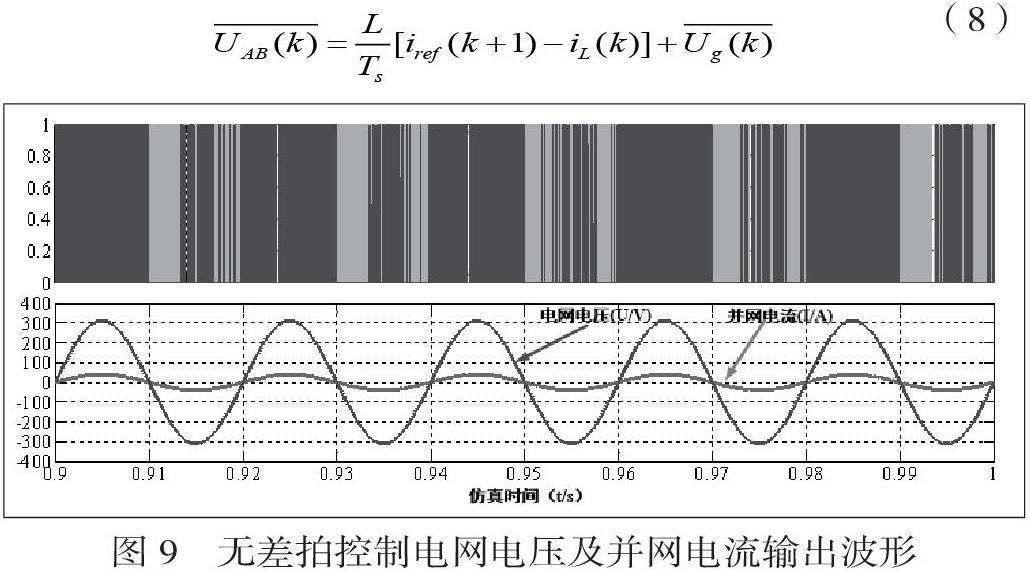
通過對圖5數字PID控制電網電壓與并網電流輸出波形與圖9無差拍控制并網電流波形及圖6數字PID控制并網電流與參考電流輸出波形與圖10無差拍控制并網電流輸出波形進行對比,明顯看出無差拍控制方式的輸出電流波形是標準的正弦波,并網電流的頻率和相位幾乎完全和參考電流一致,且諧波總畸變率THD遠遠小于并網要求的5%,僅有1.022%,且無差拍控制系統響應速度快,完全符合并網要求。由仿真系統結果分析得出結論:對于確定的系統模型,在能夠精確建立數學模型的基礎上,無差拍控制不論在控制速度還是在控制精度上都優于數字PID控制方式。
參? 考? 文? 獻
[1]趙杰. 光伏發電并網系統的相關技術研究[D],天津:天津大學,2012.
[2]陳曉君. 基于Boost電路的MPPT光伏發電系統研究[D],浙江:浙江工業大學,2014.
[3]陳雙,陳衛民,嚴虹. 直流模塊式光伏發電系統前級DC/DC變換研究[J]. 水電能源科學,2012 (8): 184-186.
[4]孫志松. 光伏并網發電系統的MATLAB仿真研究[D],南昌:南昌航空大學,2013.
[5]王昉,馬愛平,劉陵順,等. 光伏逆變器控制策略的仿真研究[J]. 船電技術,2014, 34 (11): 7-9
[6]陳誠. 單相光伏并網發電逆變器控制的研究[D],上海:華東交通大學,2013.
[7]程靜. 光伏并網逆變器孤島檢測方法研究[D],河南:河南師范大學,2012.
[8]郭建凱. 雙級式單相光伏并網系統的研究[D],遼寧:東北大學,2012.
