基于SMO的改進型轉子位置檢測方法
2021-01-06 09:01:58趙亞輝馮明李衛文
北京航空航天大學學報 2020年12期
趙亞輝,馮明,李衛文
(北京科技大學 機械工程學院,北京100083)
近年來,隨著材料技術、電力電子器件、高性能集成電路的發展,基于矢量控制技術的永磁同步 電 機(Permanent Magnet Synchronous Motor,PMSM)由于其結構簡單、功率密度高、可與高速負載直接相連等特點[1-2],被廣泛應用于高速空氣壓縮機、高速機床主軸等工業領域,在航空航天和新能源等領域也有著廣闊的應用前景。為實現PMSM的高精度控制,需要獲得精確的轉子位置和速度信息,可以通過光電碼盤、測速發電機、旋轉變壓器等傳感器獲取,但會帶來電機成本增加、安裝維護困難、易受外界干擾等問題,影響電機的可靠性。因此,PMSM 的無位置傳感器控制技術成為高速電機控制領域的研究熱點[3-5]。由于超高速電機的繞組電感和內阻非常小,一旦控制失步會引起繞組電流迅速增加,燒毀功率器件甚至造成電機轉子磁鋼退磁,因此保證控制器準確地檢測電機轉子位置尤為重要。
目前,常用的轉子位置估計方法有反電勢積分法[6-8]、模型參考自適應法[9]、擴展卡爾曼濾波法[10]、滑模變結構觀測器法[11-12]等。其中,反電勢積分法易受電機參數變化的影響,且存在定子磁鏈積分的常值漂移問題;模型參考自適應法雖計算簡單,但對參數變化比較敏感;擴展卡爾曼濾波法實時計算量大,對控制芯片的依賴度高,且動態響應不理想;滑模變結構觀測器法響應速度優于模型參考自適應法,但滑模控制率中的開關函數具有不連續性,易引起系統抖振。而文獻[13-15]中分別采用飽和函數、雙曲正切函數和邊界層可變的正弦型飽和函數代替開關函數,起到了抑制滑模抖振的作用。
在傳統滑模觀測器(Sliding Mode Observation,SMO)的基礎上,提出基于SMO的改進型轉子位置檢測方法。該方法采用S型函數代替傳統的開關函數來估算反電動勢,有效地減小了傳統SMO所帶來的抖振現象,估算的反電動勢通過軟件鎖相環(Software Phase Locked Loop,SPLL)計算轉子位置角對轉子位置進行實時跟蹤估計,可以提高系統的跟蹤精度并改善系統的控制性能,削弱SMO抖動對轉子位置角的影響,實現PMSM在高速運行狀態轉子位置角的觀測。通過仿真和實驗證明該改進型SMO算法的高精度性和穩定性,使電機能在超高速狀態下平穩運行。
1 永磁同步電機數學模型
表貼式PMSM在α-β定子靜止坐標系下數學模型可以表示為[15]
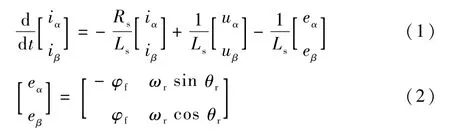
式中:uα、uβ,iα、iβ和eα、eβ分別為α-β定子靜止坐標系下的定子電壓,定子電流和反電動勢;Rs和Ls分別為定子的電感和相電阻;θr為轉子位置角;φf為轉子磁鏈;ωr為轉子永磁體的旋轉速度。
由于采用id=0的電流控制方法,穩態時其空間矢量圖如圖1所示。當前輸出的電壓空間矢量為us,對應的is正好在q軸上,滿足id=0,且is的旋轉速度為ωs;轉子永磁體等效勵磁磁鏈φf的方向與d軸相同,d軸方向為轉子永磁體的S-N方向,其旋轉速度為ωr。當PMSM 運行穩態時,有ωs=ωr。θr為d軸與α軸的夾角,也即需要觀測的電機轉子位置角。
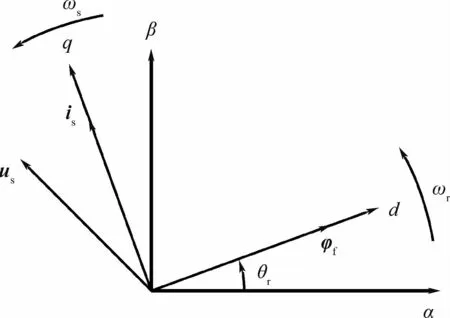
圖1 穩態空間矢量Fig.1 Space vector at steady state
2 滑模觀測器(SMO)的改進
2.1 傳統SMO
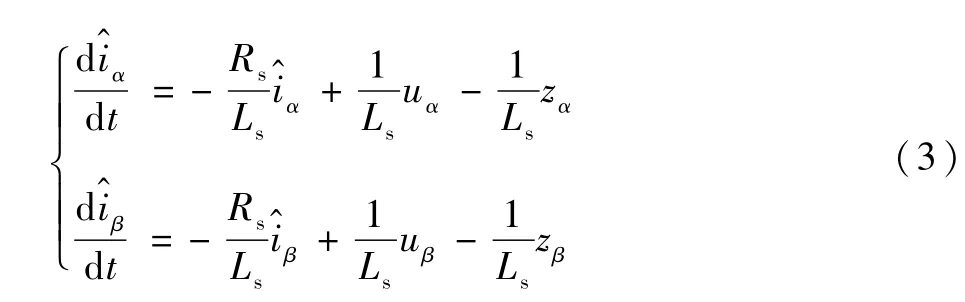
結合表貼式PMSM在α-β定子靜止坐標系下的數學模型,并根據滑模變結構控制理論,構造SMO方程[16]

2.2 切換函數的改進
傳統SMO一般選取符號函數Z=sgn(s)作為切換函數,它使得觀測器的響應非常迅速,抗擾動性強,但是其固有的非線性開關特性會引起系統抖振,從而影響位置估算精度[17]。為了抑制抖振,采用一種新的連續切換函數為

式中:a、ε為正數,a用來調整S型函數的斜率,ε用來調整收斂于滑模面的速率;H(s)為S型切換函數。
2.3 轉子位置角計算方法的優化
由于SMO在滑動模態下伴隨著高頻抖振,估算的反電勢存在高頻噪聲信號,而基于反正切函數的轉子位置估計方法將這種高頻噪聲信號引入到反正切函數的除法運算中,導致高頻抖振被放大,造成較大的角度估計誤差[16],使電機不能在超高速狀態下穩定工作。因此本文引入SPLL算法計算轉子位置角,消除計程中的高頻噪聲信號。
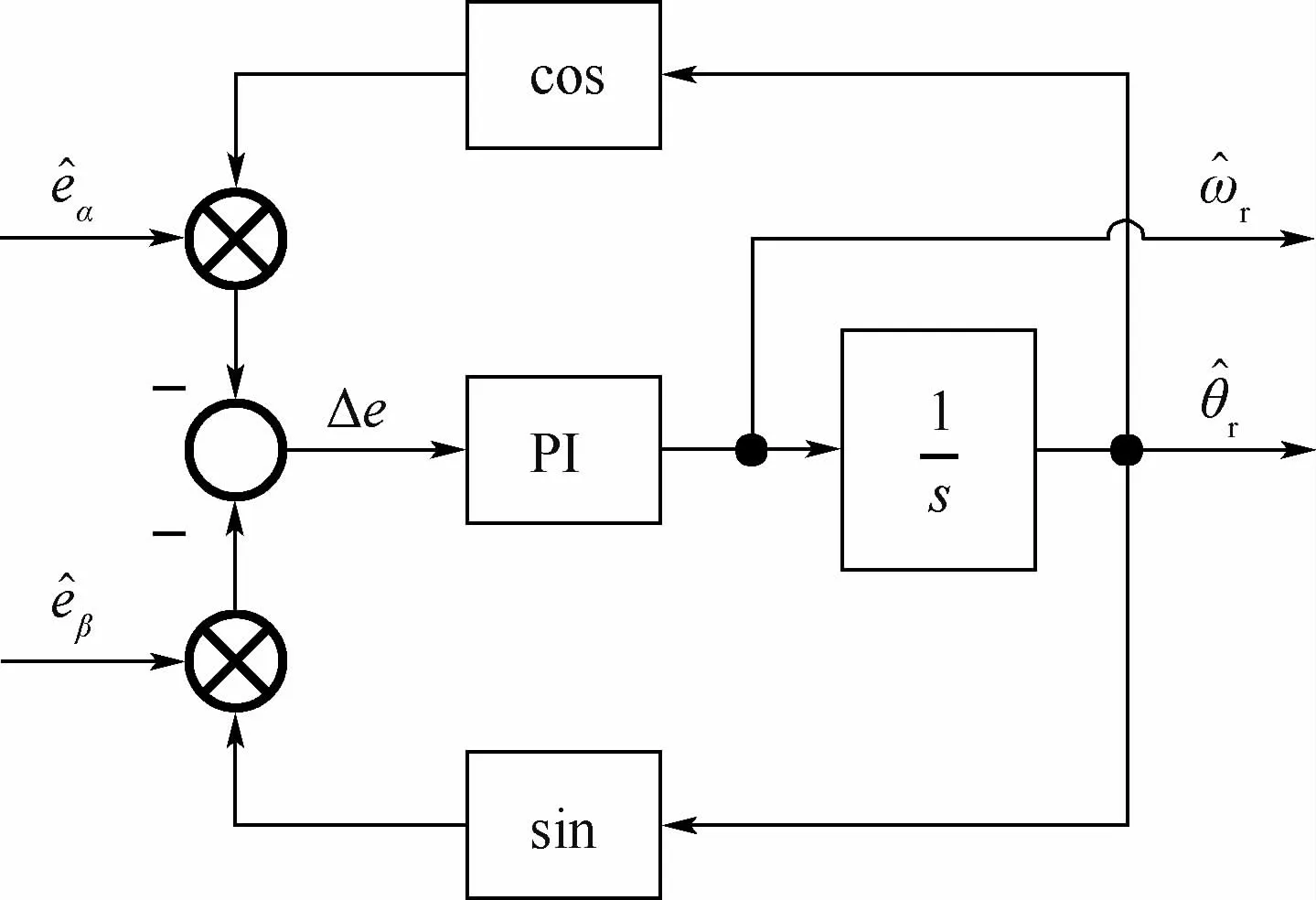
圖2 SPLL算法示意圖Fig.2 Schematic of SPLL algorithm
由式(25)可知,通過三角函數和差公式構建鑒相器可以衡量相位差的大小,通過PI控制使轉子位置角誤差衰減至零即可求解電機轉子位置和角速度,算法如圖3所示,kp和ki分別為比例和積分系數。
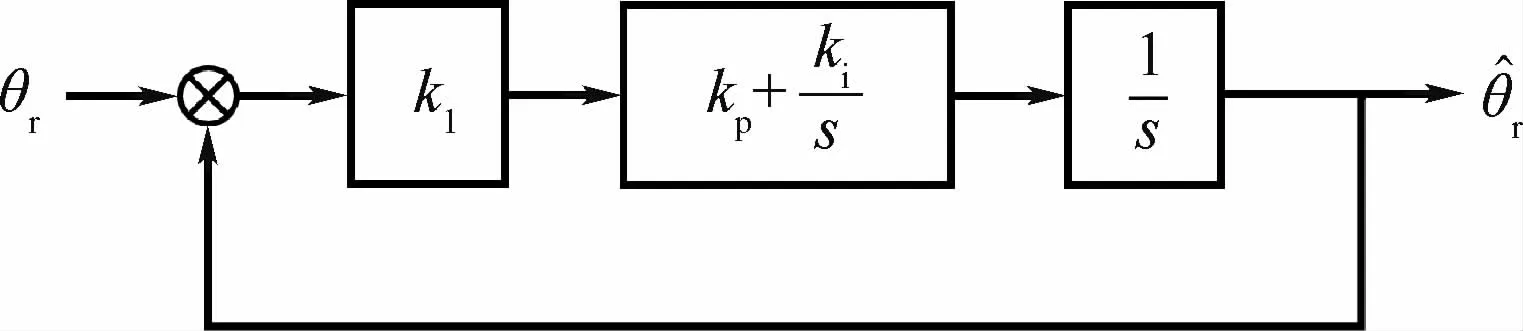
圖3 簡化SPLL算法Fig.3 Simplified SPLL algorithm

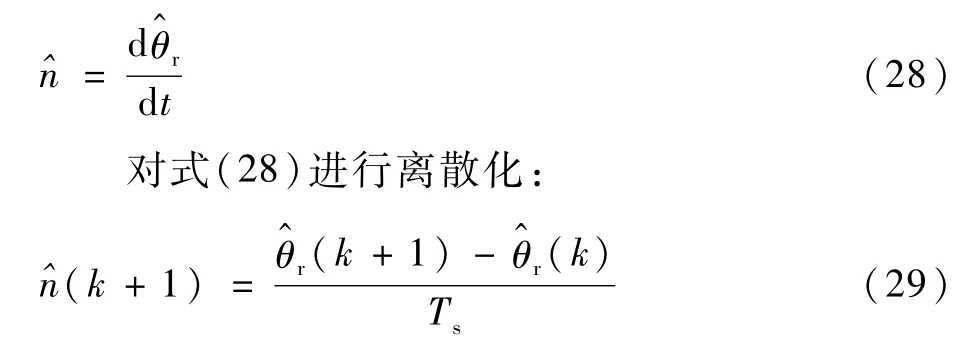
式中:Ts為控制周期。
實際應用中,使用轉速和電流雙閉環控制PMSM超高速運行時,轉速環控制周期是電流環控制周期的5~10倍,電機轉速更快速趨于穩態。利用平均算法將式(29)寫成

式中:j為正整數,滿足5≤n≤10。
式(30)只需要轉子位置角信息就可以計算出轉速,對于無位置傳感器控制具有通用性。
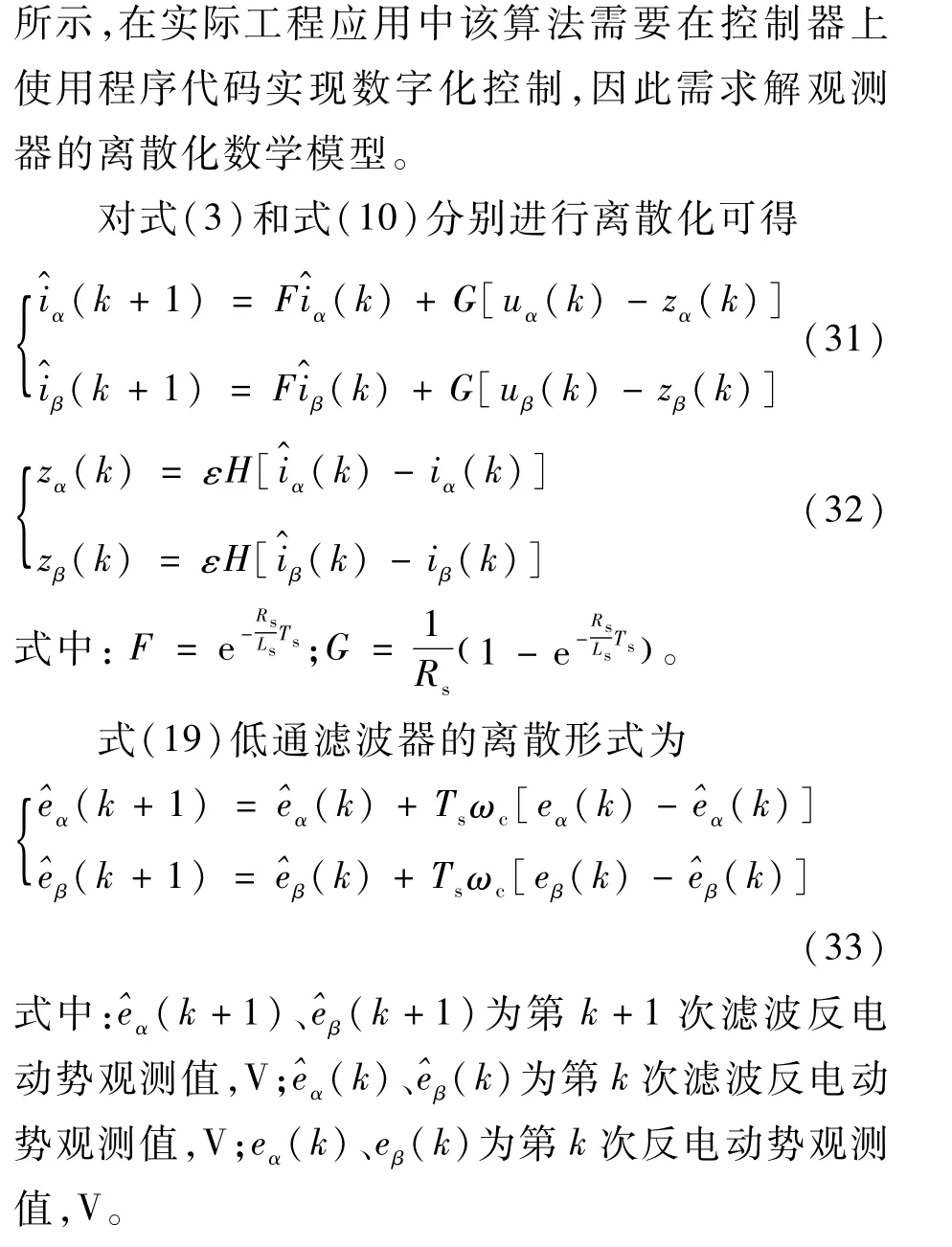
2.4 改進SMO算法的離散化處理及實現
本文所提改進SMO算法的結構框圖如圖4
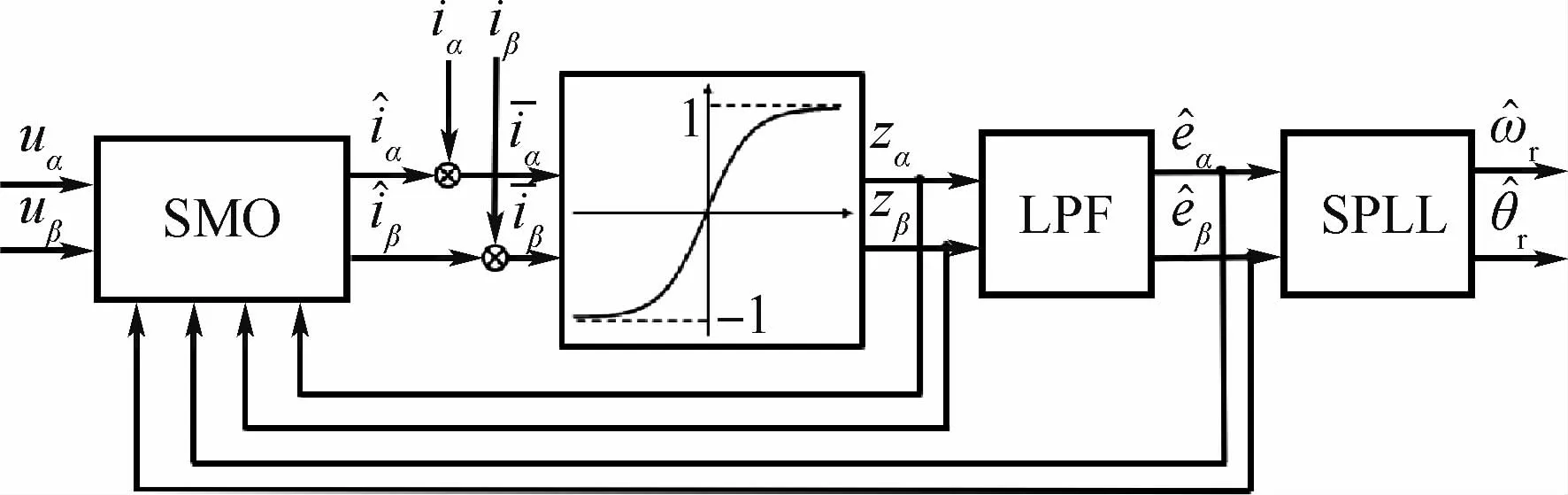
圖4 改進SMO算法結構框圖Fig.4 Improved SMO algorithm block diagram
定時器中斷程序框圖如圖5所示,根據程序框圖即可實現該算法的數字化控制。圖中:iA和iC分別為電機A、C相電流采集值;uDC為母線電壓采集值;err(k+1)為PI控制器的控制偏差Δe;err_err(k+1)為PI控制器的控制偏差的偏差;ωinc為角速度增量;X、Y、Z分別為計算矢量作用時間的中間變量。分支虛線框為傳統SMO計算,分支實線框為改進SMO計算,由程序框圖可知,在切換函數計算、位置角計算2個模塊中,改進SMO算法比傳統SMO算法多了1次三角函數運算、1次除法運算、2次指數運算和6次乘法運算,算法復雜度稍有提升。本文采用的控制頻率為15 kHz,定時器中斷執行周期為66.67μs,經測試傳統SMO算法的執行時間為14μs,改進SMO算法的執行時間為19μs;使用改進SMO算法的整個定時器中斷執行時間為35μs左右,耗時占控制周期的52.5%,因此可以滿足執行算法的實時性和快速性要求。

圖5 定時器中斷程序框圖Fig.5 Timer interrupt program block diagram
3 系統仿真
本文控制對象為一臺燃料電池汽車離心式空氣壓縮電機,如圖6所示,電機參數如表1所示。
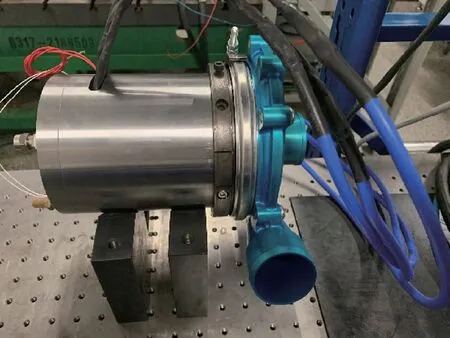
圖6 實驗用空氣壓縮機Fig.6 Experimental air compressor
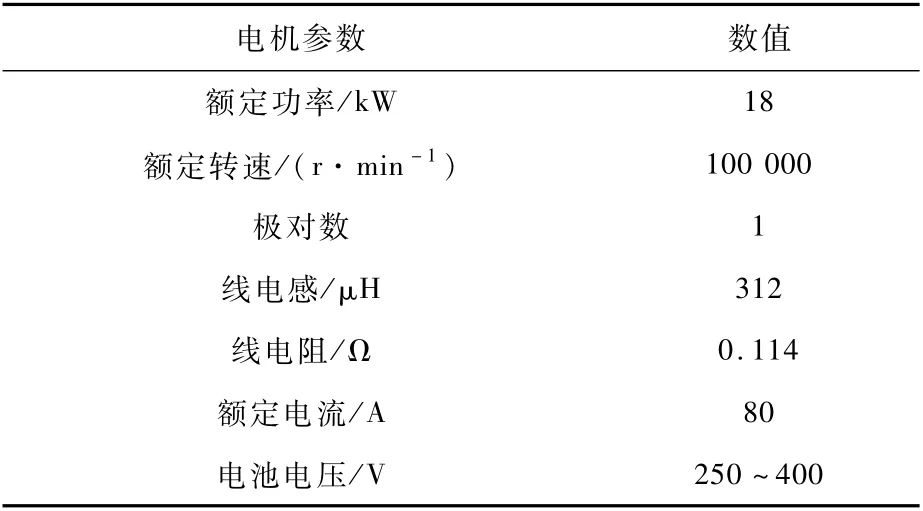
表1 實驗用空氣壓縮機電機參數Tab1e 1 Air compressor motor parameters for experiment
圖7為PMSM矢量控制系統框圖。該控制系統采用id=0的控制方法,其中nref為電機轉速設定值;轉速環、d軸電流環和q軸電流環均采用PI控制;轉速環根據轉速誤差輸出q軸電流環的設定值,d軸電流環和q軸電流環分別輸出目標電壓矢量us在d-q坐標系下目標電壓矢量;ud、uq經過Park逆變換可以得到us在α-β坐標系下的坐標uα、uβ,SVPWM 算法模塊可以根據uα、uβ計算出功率開關的控制信號,來控制驅動控制器中逆變模塊實現PMSM 的矢量控制。圖中:idref和iqref分別為d、q軸電流參考值。
根據矢量控制原理和電機參數對改進型轉子位置檢測方法進行仿真建模,如圖8所示。
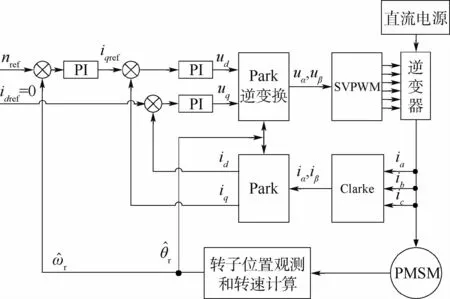
圖7 PMSM矢量控制系統框圖Fig.7 PMSM vector control system block diagram
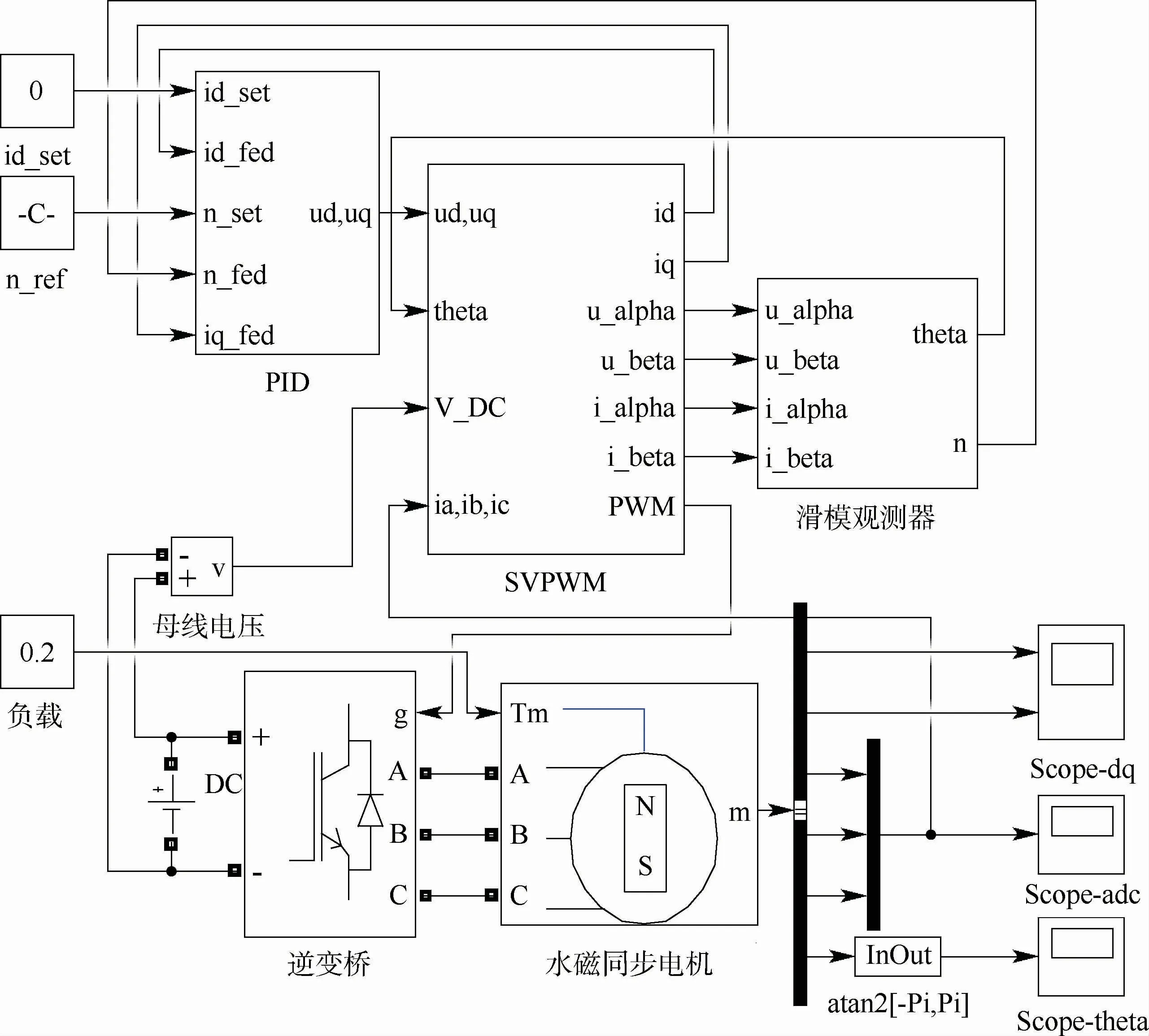
圖8 改進型SMO仿真模型Fig.8 Improved SMO simulation model
在仿真模型中使用傳統SMO控制,電機轉速在50000 r/min時轉子位置角抖動很大,限制了電機進一步提速,因此以50000 r/min轉速為例對轉子位置角波形進行對比分析。圖9為傳統SMO觀測角度和改進切換函數觀測角度的波形對比,轉子位置角轉化到-π~π范圍。圖中實線為實際轉子位置角,點畫線為傳統SMO觀測的轉子位置角,虛線為改進切換函數觀測的轉子位置角角。右下角局部放大圖為轉子位置角從π經過一個電周期切換到-π時的波形,從圖中可以看出傳統SMO有5次切換過程,而改進切換函數只有一次切換,說明改進切換函數提高了切換準確率,但是與實際切換位置仍有10μs偏移時間。從圖9中左上角局部放大圖可以看出,傳統SMO觀測的轉子位置角抖動較大,而改進切換函數觀測的轉子位置角抖動減小,但存在轉子位置角滯后,而且抖動問題仍然比較明顯。
圖10為傳統SMO觀測角度和改進SMO觀測角度的波形對比。實線為實際轉子位置角,點畫線為傳統SMO觀測的轉子位置角,虛線為改進SMO(改進切換函數并使用SPLL計算位置角)觀測的轉子位置角。從圖10中2個局部放大圖的波形可以看出,在改進切換函數并引入SPLL計算的轉子位置角波形和電機實際轉子位置角波形接近,切換位置偏移時間減小到4μs,傳統SMO觀測的轉子誤差最大為0.08 rad,改進SMO觀測的轉子誤差最大為0.02 rad,轉子位置角靜態誤差被消除,幾乎無抖動現象。驗證了改進SMO觀測的電機轉子位置角抖動小,更接近電機實際位置。
通過以上分析可知,本文提出的改進型轉子位置檢測方法可以有效削弱傳統SMO抖動,提高轉子位置角切換準確性。

圖9 改進切換函數轉子位置角波形對比Fig.9 Comparison of improved switching function rotor position angle waveforms
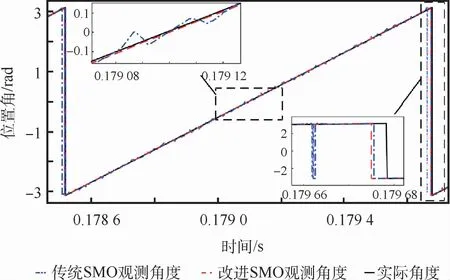
圖10 改進SMO轉子位置角波形對比Fig.10 Comparison of improved SMO rotor position angle waveforms
4 實驗驗證
4.1 控制器設計
采用改進型轉子位置檢測方法研發的高速PMSM控制器如圖11所示。控制器由主控板和驅動板組成,主控板使用TI公司TMS320F28335數字處理芯片,主要負責采集電壓電流信號、觀測轉子位置角并通過FOC算法產生PWM 輸出,驅動板主要負責直流母線輸入和三相PMSM 電壓輸出,并進行電壓電流采集、IGBT驅動、突波吸收和硬件保護等,此外驅動電機高速運行時還需要使用水冷器散熱。

圖11 實驗控制器Fig.11 Experiment controller
4.2 實驗平臺
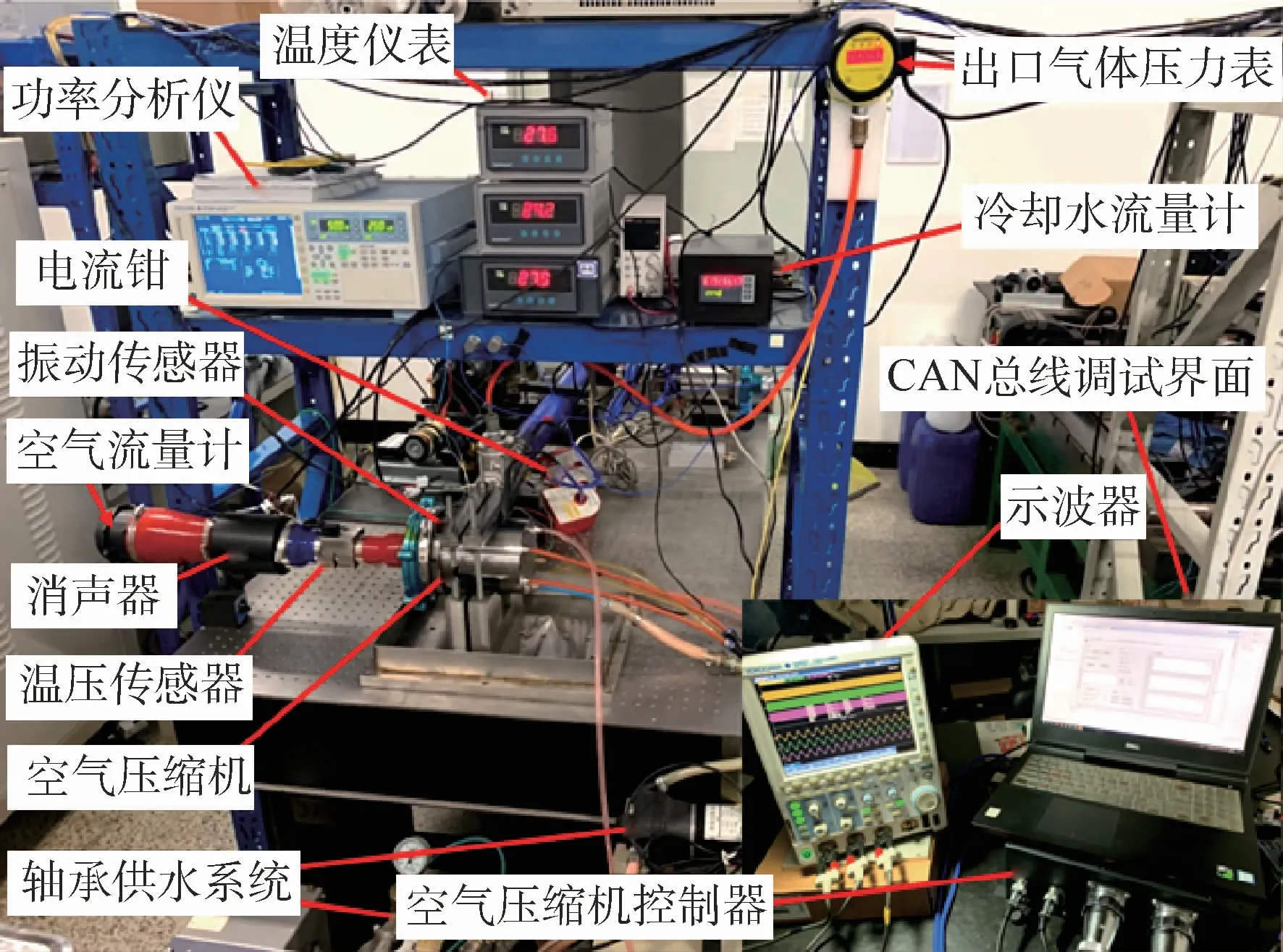
圖12 實驗平臺Fig.12 Experiment platform
為驗證本文提出的改進SMO方法的有效性,搭建圖12所示燃料電池汽車空氣壓縮機控制器實驗臺進行實驗驗證。功率分析儀用于觀測電機的電流、電壓波形,測量電機的功率、效率以及功率因數等;溫度儀表用于測量電機內部繞組、蝸殼和軸承水的溫度;冷卻水流量計用于測量提供給水潤滑軸承潤滑水和冷卻水的流量;出口氣體壓力表用于測量出氣口的空氣壓力;電流鉗與示波器和功率分析儀配合,用于測量三相電流;振動傳感器用于測量電機的振動情況,并根據振動頻率計算出電機的實時轉速;空氣流量計用于測量進氣口的空氣流量;溫壓傳感器用于測量空壓機進出口溫度和壓力;消聲器用于減弱空壓機運行時的噪聲;空氣壓縮機即本文的控制對象,用于給燃料電池電堆提供高壓空氣;軸承供水系統用于給空壓機的水潤滑軸承供水及回水;CAN總線調試界面用于控制空壓機的啟停以及調速等;示波器用于觀察電機的電壓、電流波形以及對電流進行頻譜分析;空氣壓縮機控制器即本文開發的燃料電池汽車空氣壓縮機控制器。
4.3 實驗分析
在實驗中,通過控制器片外RAM 芯片保存DSP的運算數據,使用Python上位機進行數據分析。直流母線電壓為400V,在20000~98000 r/min范圍內對傳統SMO和改進SMO算法進行對比實驗研究。
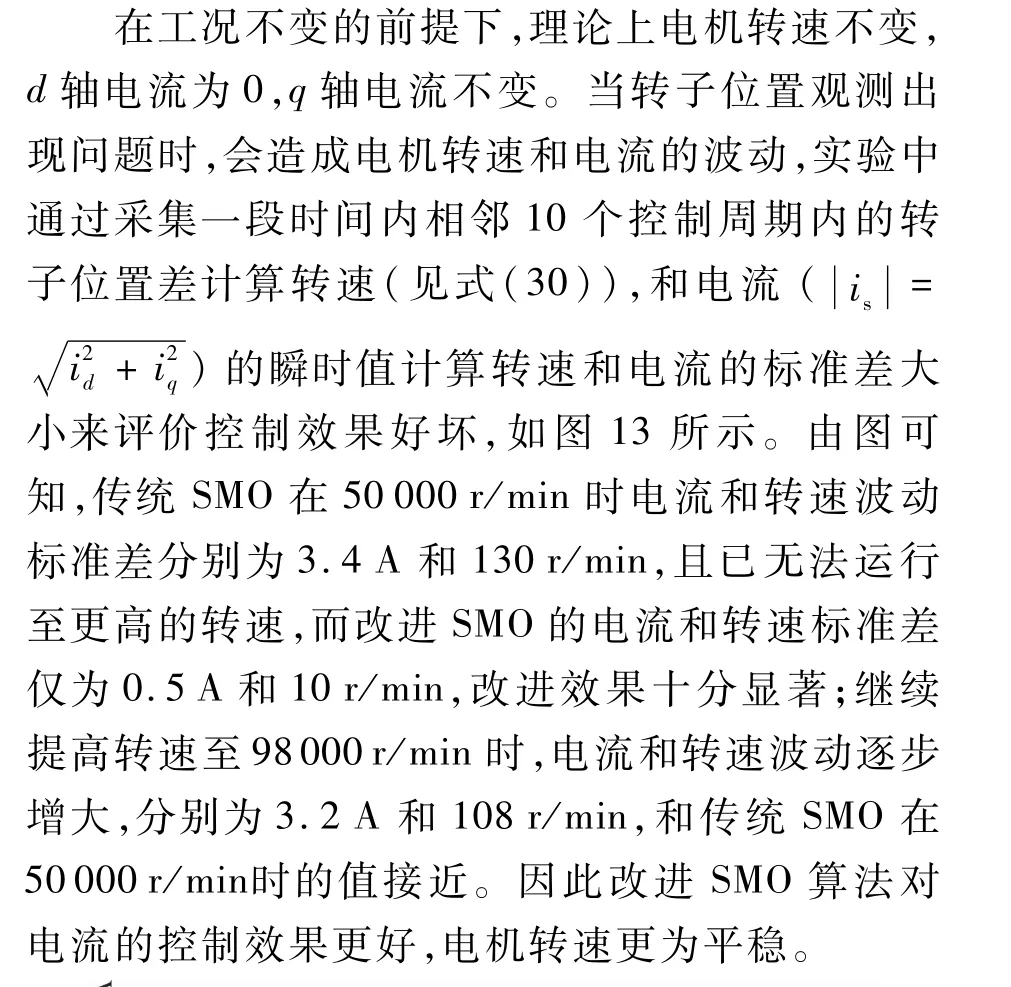
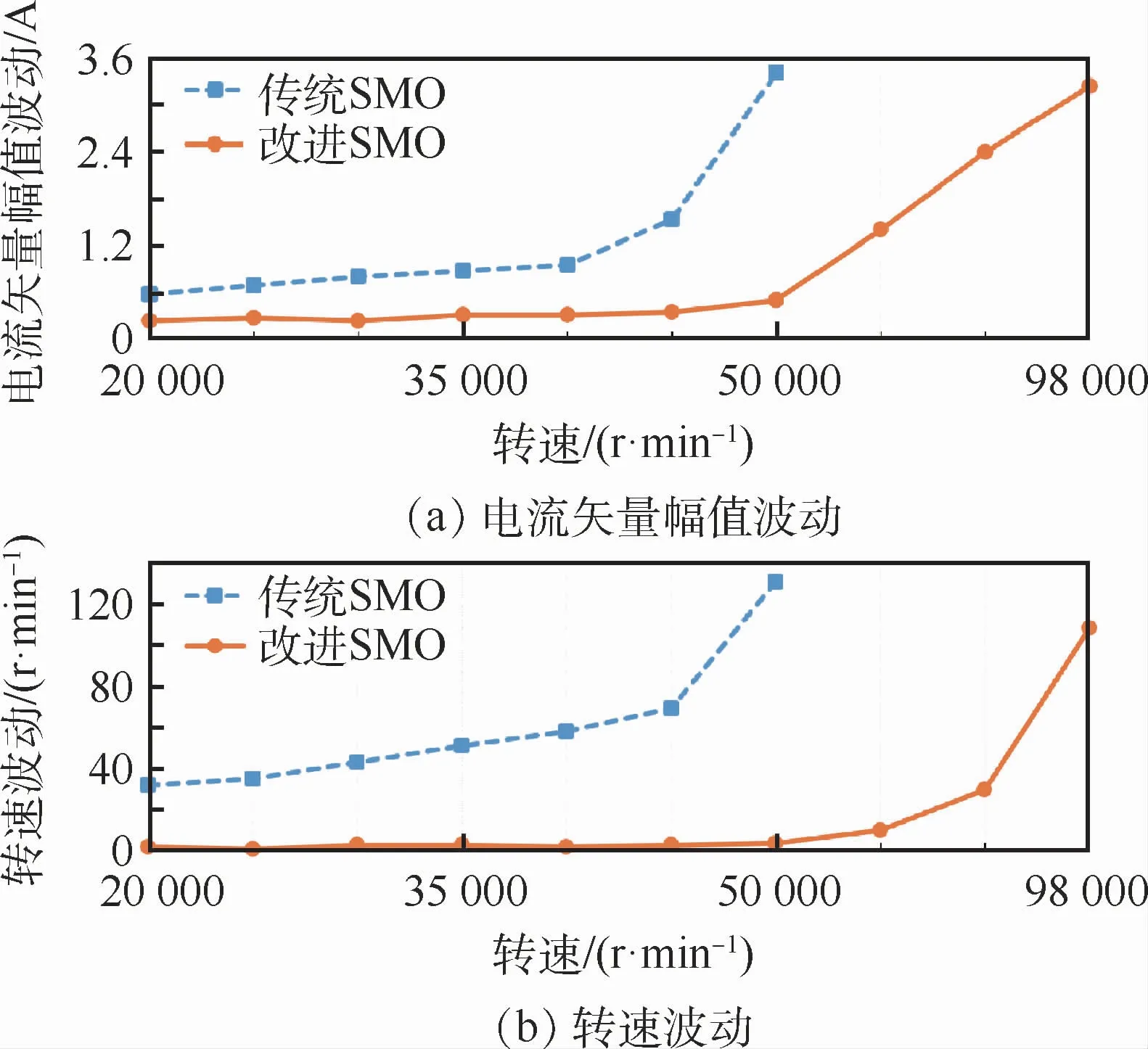
圖13 電流矢量幅值及轉速波動(用標準差測量)Fig.13 Current vector amplitude and speed fluctuations(measured by standard deviation)
圖14為傳統 SMO 和改進 SMO 算法在50 000 r/min轉速時轉子位置角波形。從圖可以看出,傳統SMO計算的轉子位置角有明顯的抖動;而改進SMO計算的轉子位置角基本無抖動,可見改進SMO算法減弱了系統高頻抖振,提高了轉子位置的觀測精度。圖中:66.667μs為控制周期。
圖15為傳統 SMO 和改進 SMO 算法在50 000 r/min時的電機相電流波形。從圖中可以看出,傳統SMO控制時電流波形抖動較大,與正弦波形也相差較遠;而改進型SMO控制電流波形抖動較小,接近理想的正弦波形。
圖16為傳統 SMO 和改進 SMO 算法在50 000 r/min轉速下電機相電壓和相電流諧波分析。從圖中可以看出,與傳統SMO相比改進型SMO的相電壓諧波含量減小2.8倍,相電流諧波含量減小2倍,說明該改進型SMO算法可以有效減小電壓和電流諧波,降低了逆變器的開關損耗和空氣壓縮機的發熱損耗,提高了空氣壓縮機系統的運行效率。
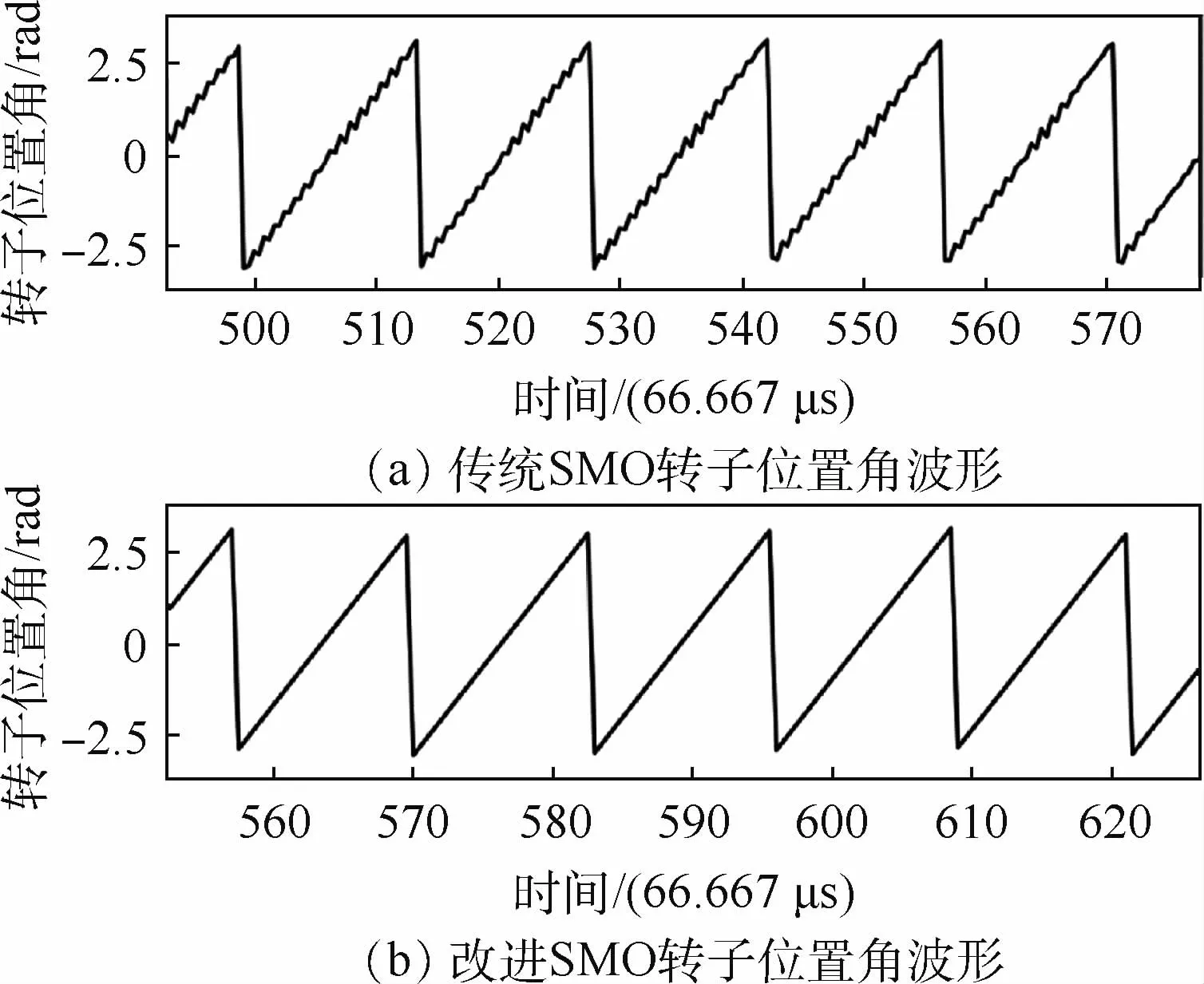
圖14 傳統SMO和改進SMO轉子位置角波形(轉速為50 000 r/min)Fig.14 Traditional SMO and improved SMO rotor position angle waveform(rotating speed equals to 50 000 r/min)
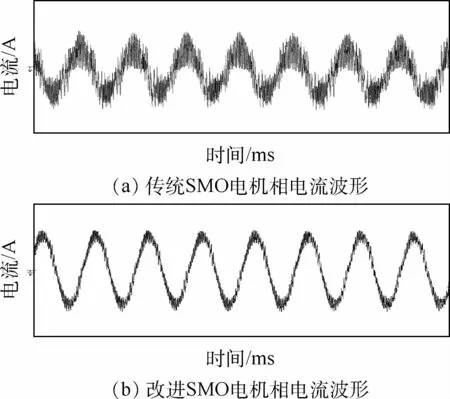
圖15 傳統SMO和改進SMO電機相電流波形(轉速為50 000 r/min)Fig.15 Traditional SMO and improved SMO motor phase current waveform(rotating speed equals to 50 000 r/min)
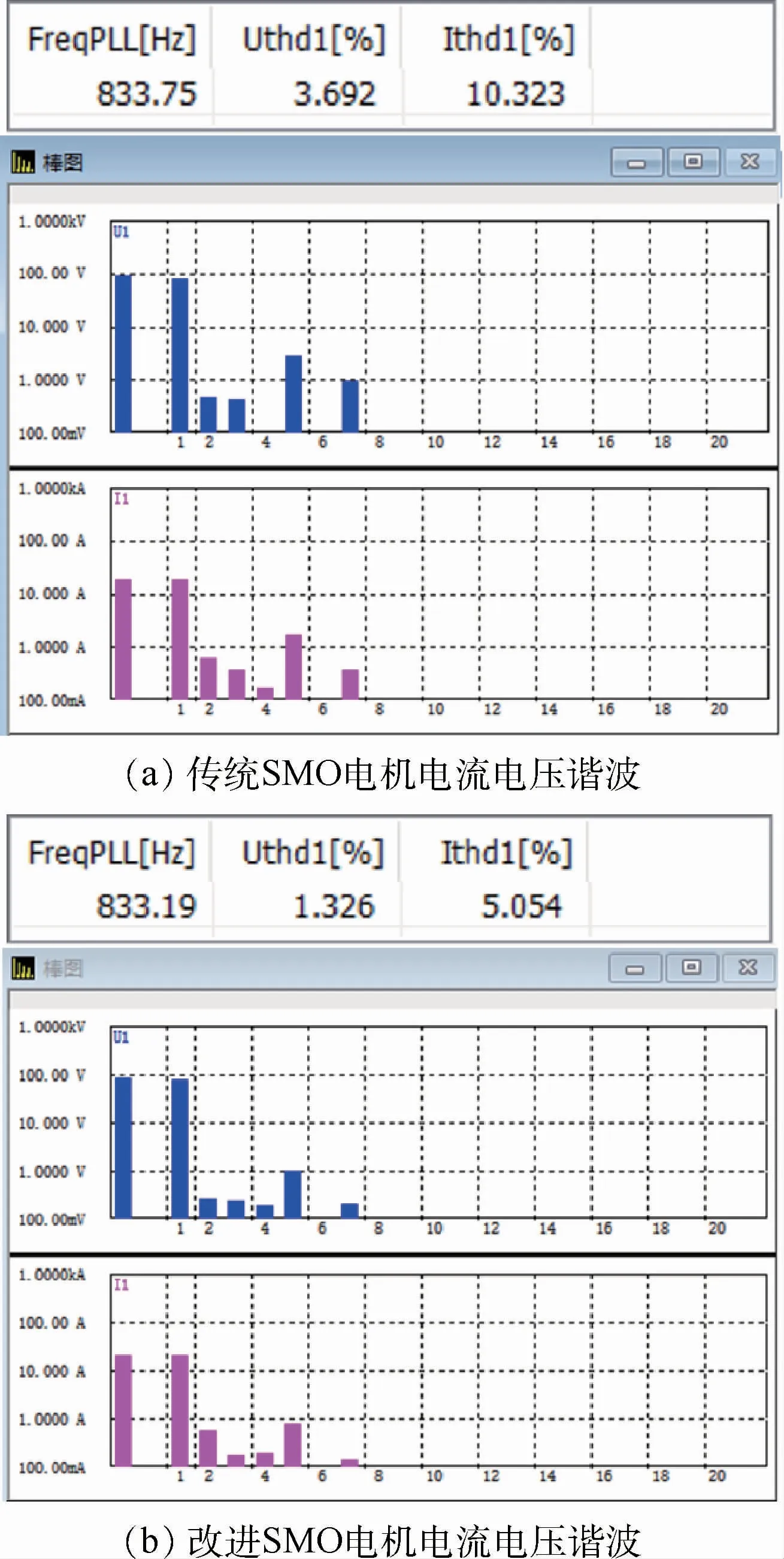
圖16 傳統SMO和改進SMO電機電流電壓諧波Fig.16 Traditional SMO and improve SMO motor current voltage harmonics
改進型SMO在更高轉速時其控制效果也有很好的表現。圖17為改進SMO 算法控制在98 000 r/min時轉子位置角和相電流波形。從圖中可以看出,轉子位置角的抖動不明顯,且電流波形仍然很接近正弦波,驗證了改進SMO算法在高速時的實時性和可行性。
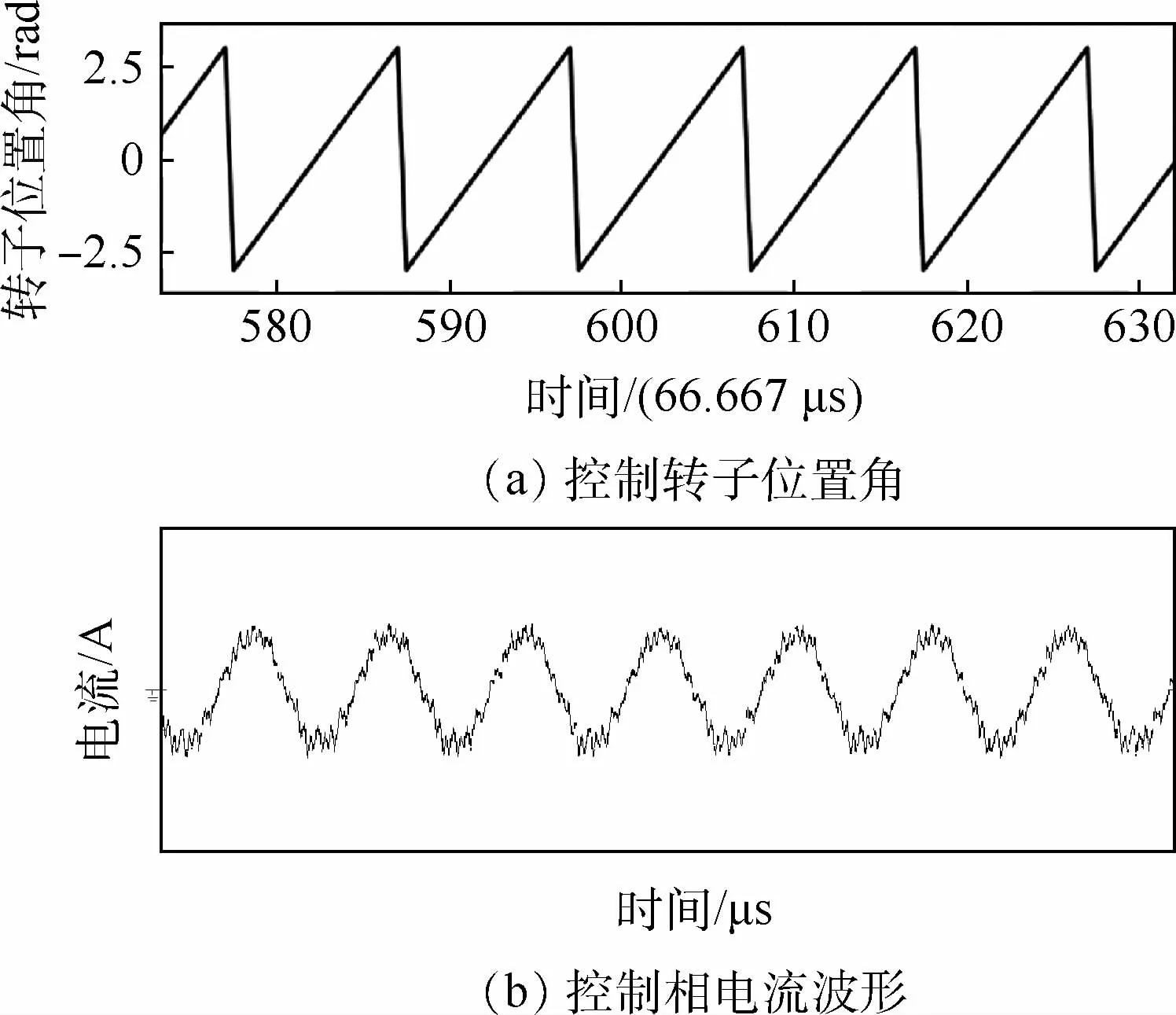
圖17 改進SMO控制轉子位置角和控制相電流波形(轉速為98 000 r/min)Fig.17 Improved SMO control rotor position angle and control with phase current waveform(rotating speed equals to 98 000 r/min)
5 結 論
針對高速PMSM 無位置傳感器控制提出了一種改進型轉子位置檢測方法,使用S型切換函數并引入SPLL算法計算轉子位置角,有效改善了傳統觀測器固有的觀測精度低、抖振問題。通過理論分析及實驗驗證,證明了該算法的可行性和穩定性。仿真和實驗結果表明:
1)相對傳統SMO算法,改進SMO算法可以削弱轉子位置角的抖動,提高轉子位置角的估計精度,轉速升至98000 r/min時轉子位置角抖動仍較小,相電流波形接近正弦,驗證了改進SMO算法的有效性和正確性。
2)采用SPLL結構避免了轉子位置角的計算誤差,提高了觀測精度。該方法對電機的參數和負載擾動具有較強的魯棒性,系統穩定性和動態性能良好。通過實驗對比得到該改進算法使相電壓諧波含量減小2.8倍,相電流諧波含量減小2倍,驗證了該算法在減小電壓和電流諧波的有效性,提高了空氣壓縮機系統的效率。
3)針對燃料電池汽車空氣壓縮機開發出滿足車載使用要求的100 000 r/min、18 k W 的無位置傳感器高速PMSM 矢量控制器。該控制器采用本文所提出的新型控制策略減弱了系統高頻抖振,減小了電機的轉速波動、電流和電壓諧波,更利于電機的動態控制,提高了空氣壓縮機系統的工作性能。