基于混合遺傳算法的機器人路徑規劃研究
2021-01-07 12:46:16焦合軍周萬春李淵博
中州大學學報 2020年6期
焦合軍,周萬春,李淵博
(鄭州工程技術學院 機電與車輛工程學院,河南 鄭州 450044)
1 引言
移動機器人的路徑規劃是機器人導航技術中一個重要的組成部分。移動機器人可以在預先設定的條件下,按照一定的規則,從起點到終點并避開障礙物尋找一條最優路徑,該路徑長度小,消耗時間少。路徑規劃有全局和局部之分,全局路徑規劃著眼于已知路徑信息,局部路徑規劃著眼于未知的環境信息[1]。
目前在移動機器人全局路徑規劃中,常用的進化算法有遺傳算法、人工魚群算法[2]、粒子群算法和蟻群算法等。然而,傳統的遺傳算法求解過程耗時長,生成的路徑沒能達到最優避障;蟻群算法收斂的速度比較慢,容易出現停滯,陷入局部最優;人工魚群算法在優化初期有很好的收斂性,后期收斂較慢,并且隨著人工魚的增多,造成存儲需求大、計算量大的缺點;粒子群算法有較快逼近最優解的能力,可以對系統參數進行有效的優化,優勢在于對連續函數的優化,其缺點是容易早熟收斂,局部尋優能力變差。
本文針對一般的遺傳算法進行改進,在遺傳操作時加入A*算法,調整交叉和變異的概率,不僅使前期進化能力增強,改進交叉和變異方法,催生新的染色個體能力加強,又提高了算法的搜索效率。
2 路徑規劃
2.1 環境模型建立
在對機器人路徑建模時,首先要對其環境地圖進行平面化處理,使用柵格地圖是簡單有效的方法。在柵格圖中,黑格表示障礙物,白格代表機器人可以經過的自由空間。使用序號標記法進行柵格標記,按照從左到右,從上到下的原則依次加1進行標記。在圖1所示的模型中,S,2,3,…,99 ,E等稱為柵格節點,S 為機器人起始點位置,E為目標點位置。給定柵格序號T(i,j)與直角坐標點P(i,j)[X(i,j),Y(i,j)]的關系如下:
(1)
2.2 編碼方式
遺傳算法中的染色體是一組個體編碼,針對機器人路徑規劃問題,我們定義為從起始點到終點的一條路徑。為了保證路徑的可靠性和實用性,路徑中不可出現重復序號和障礙物序號[3]。如圖2所示,一條有效路徑可以表示為:S→12→23→33→44→54→65→75→85→86→87→88→98→99→E。
2.3 種群初始化
使用柵格法進行路徑規劃時,機器人在周圍無障礙的情況下可以向左、左上、左下、右、右上、右下、上、下8個方向移動。文中將A*算法用于遺傳算法的初始化,隨機分配一個無障礙點,在已有起始點和終點利用A*算法建立鏈接,具體的實現步驟如下:
第一步 將起點坐標和終點坐標(如圖 1中的S和E)加入染色體編碼中;
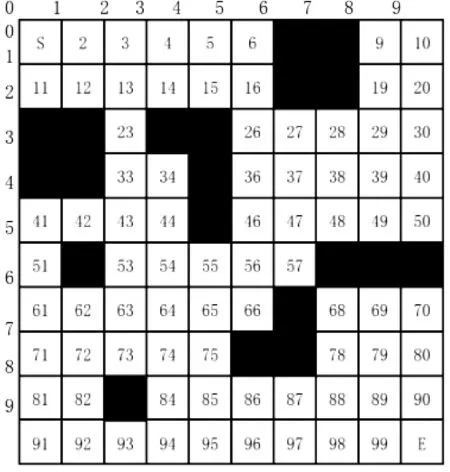
圖1 機器人路徑規劃地圖模型
第二步 在地圖模型中加入1 個無障礙隨機點作為目標點,利用A*算法分別建立起始點到該點以及該點到終點的路徑,在路徑建立過程中避免障礙點和外圍區域,之后將起始點和終點鏈接起來;
第三步 種群要保持染色體的差異性,對路徑節點一模一樣的進行刪除,最終生成一個集合。此刻結束初始化。
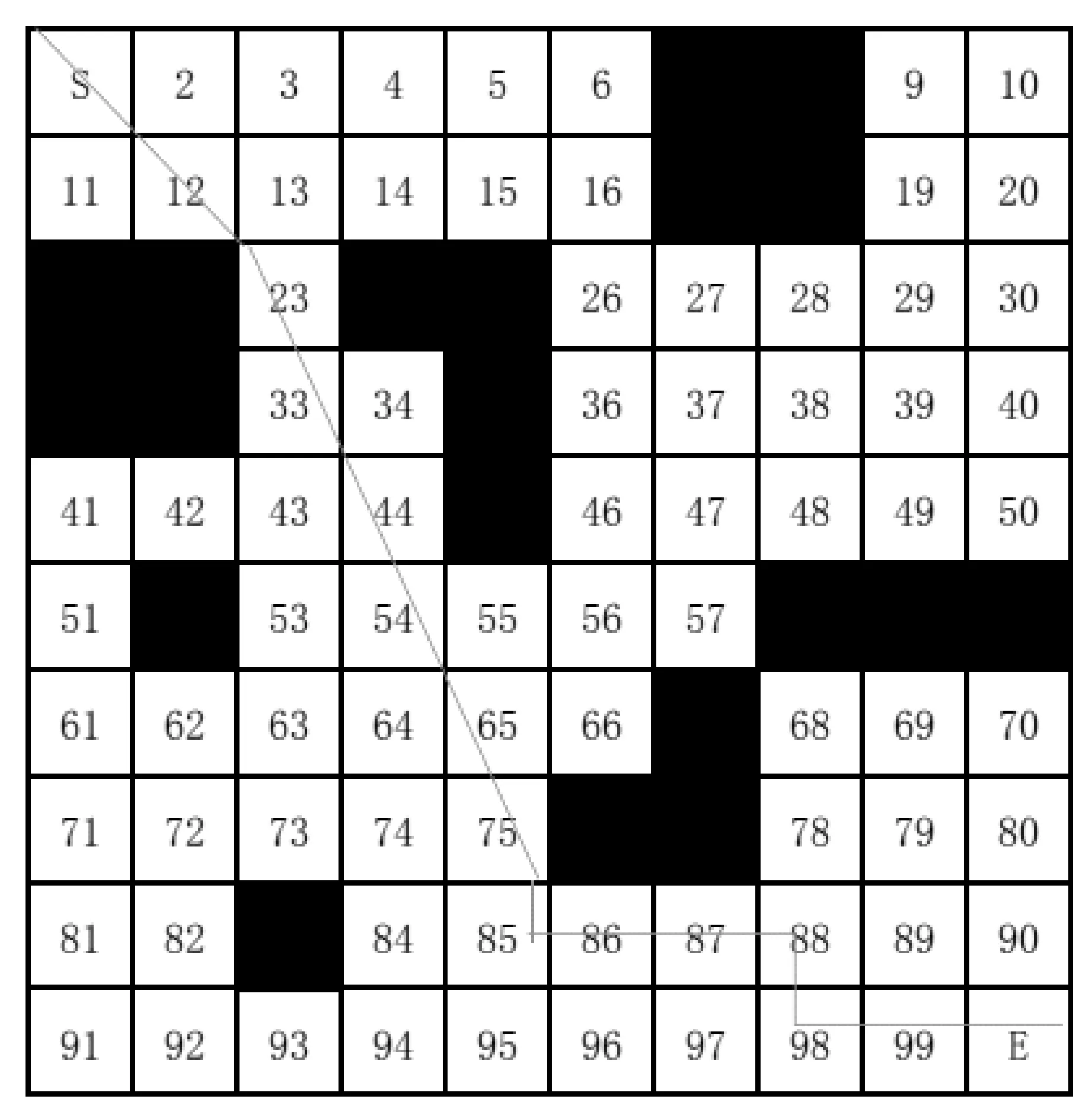
圖2 地圖序號標記
2.4 適應度函數
采用機器人從起始點到終點的路程作為路徑規劃的適應度評價,所以在路程的規劃指標下,分別得適應度函數為[4-5]:

(2)
2.5 遺傳操作
2.5.1 選擇算子
為了選出適應度較好的一部分個體,結合貪心算法,在初始種群中,算出適應度的平均值,每個染色體個體的適應度值與該平均值比較,如果大于平均值,保留該染色體個體,否則,丟棄該個體。每次迭代,重復此操作。這種選擇方法,保證了每次迭代使種群向優秀方向過渡。通過與平均值的比較,不僅保證了個體的多樣性,而且保證了種群的穩態繁殖。
2.5.2 交叉算子
在種群中找出一對有共同點的染色體,共同點不是起始點和終點,隨機選擇其中一個共同點,交換這兩個染色體的前半部分路徑點,染色體交叉示意如圖3所示,圖中a,c兩個圖的染色體在序號點處交叉,生成b,d圖中兩個染色體。
2.5.3 變異操作
變異操作對遺傳算法最優解的產生有積極的作用,變異操作可以防止遺傳算法陷入早熟和局部最優的環境。在一條全路徑上選取除了起始點和終點的兩個隨機節點,根據A*算法生成一條兩個節點間的路徑,代替兩個節點的原路徑。為了避免優秀路徑不被破壞,變異操作后期要考慮減少或停止變異操作。例如:個體變異前為 V ={S,11,…,96,87,98,99,E} ,變異節點為96和98,產生的新路徑為:C ={S,11,…,96,97,98,99,E}。
2.7 混合遺傳算法流程
首先利用A*算法產生原始種群,并得出各個個體的適應度值,之后選擇并以一定概率進行交叉和變異操作找出最優解的個體,最后判斷是否符合結束條件,在進行個體適應度數值和最優解之間進行比較,滿足結束條件,退出遺傳操作,否則繼續交叉和變異,生成新一代種群[6]。該算法的步驟如圖4所示。
3 仿真分析
為了證明算法的合理性,本文在Visual C++環境中分別編寫了路徑規劃的一般遺傳算法和混合遺傳算法,對比兩種算法的特點。由于具體尺寸上沒有指定,本文用數字表示相關參數。柵格的尺寸為10×10,起點為(0,0),終點為(9,9),在 2個地圖環境下得到的路徑長度和收斂速度如圖5、6所示。
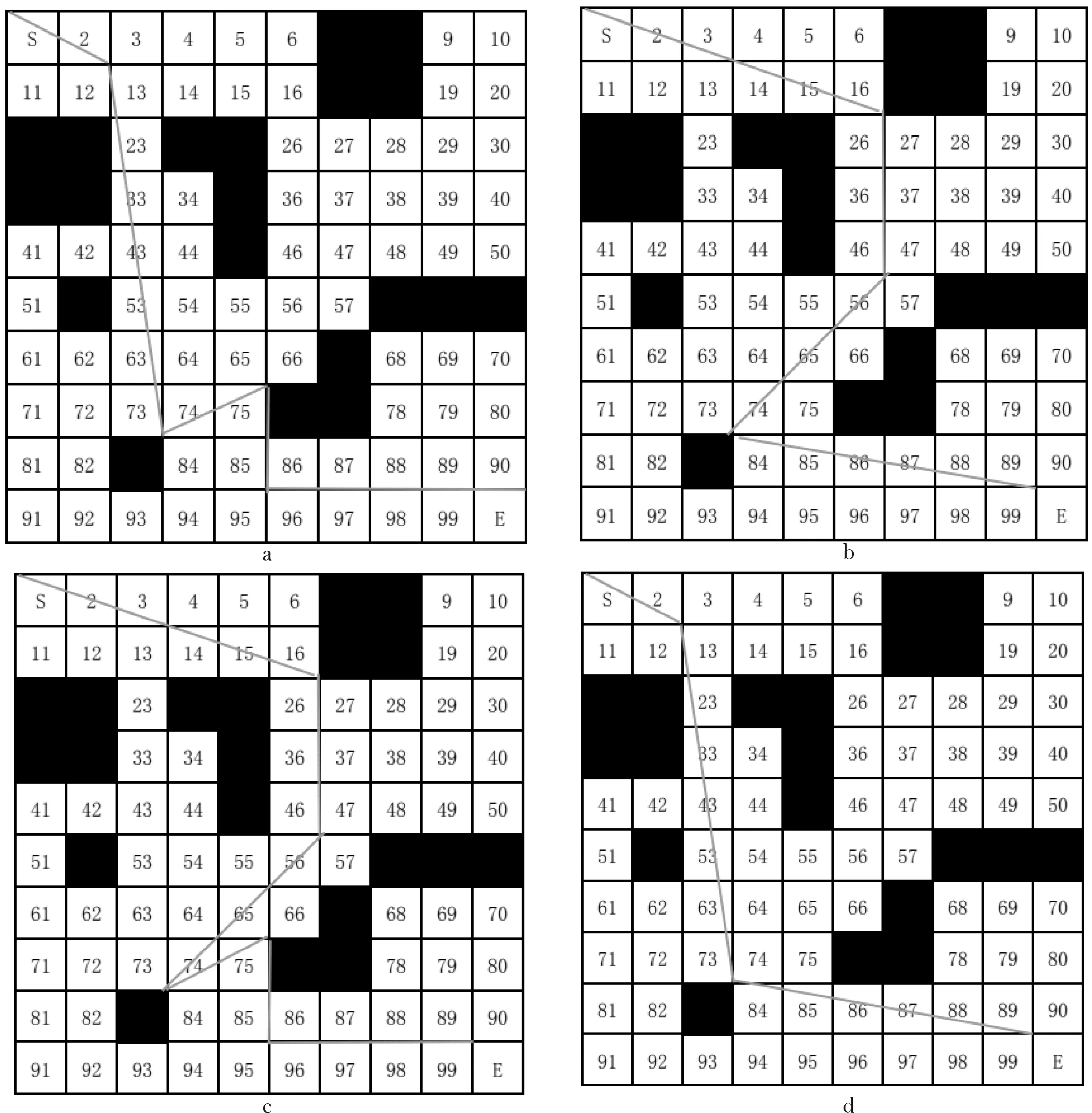
圖3 交叉操作示意圖
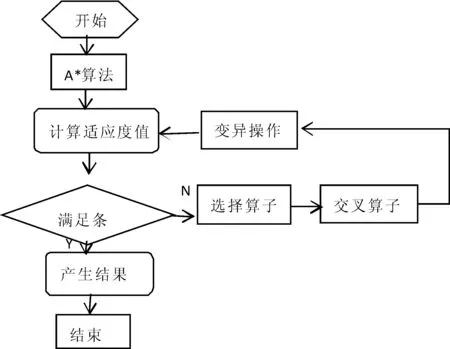
圖4 混合遺傳算法的步驟
對于一般遺傳算法,遺傳種群數目為50,變異和交叉的概率為0.06和0.9,最大迭代數為50;對于本文提出的算法,種群數目為50,5次迭代前交叉率是0.9,5代后交叉率為0.3,5代前變異率為0.06,5代后變異率為0.01,最大遺傳代數為50。
兩種算法結果不同,一般遺傳算法最佳路徑長16.5228,混合遺傳算法的最優路徑長度為14.8173,一般遺傳算法的路徑長于混合遺傳算法,并且從適應度變化折現中看出,一般遺傳很快進入局部最優,一般遺傳算法的收斂速度沒有混合遺傳算法快。
4 結論
本文針對機器人的路徑規劃,討論了一種新的混合遺傳算法。通過實驗對比,混合了A*算法的遺傳算法在機器人路徑規劃方面是有效的。該算法有以下特點:
(1)引入隨機節點,通過A*算法保證了種群中染色體的多樣性,保證了路徑的局部最優。
(2)算法中的交叉和變異方法,催生新的染色個體能力強,方便個性差距大的個體出現。
(3)算法可以調整交叉和變異概率,算法的前期進化能力較強,算法的求解效率有所提高。
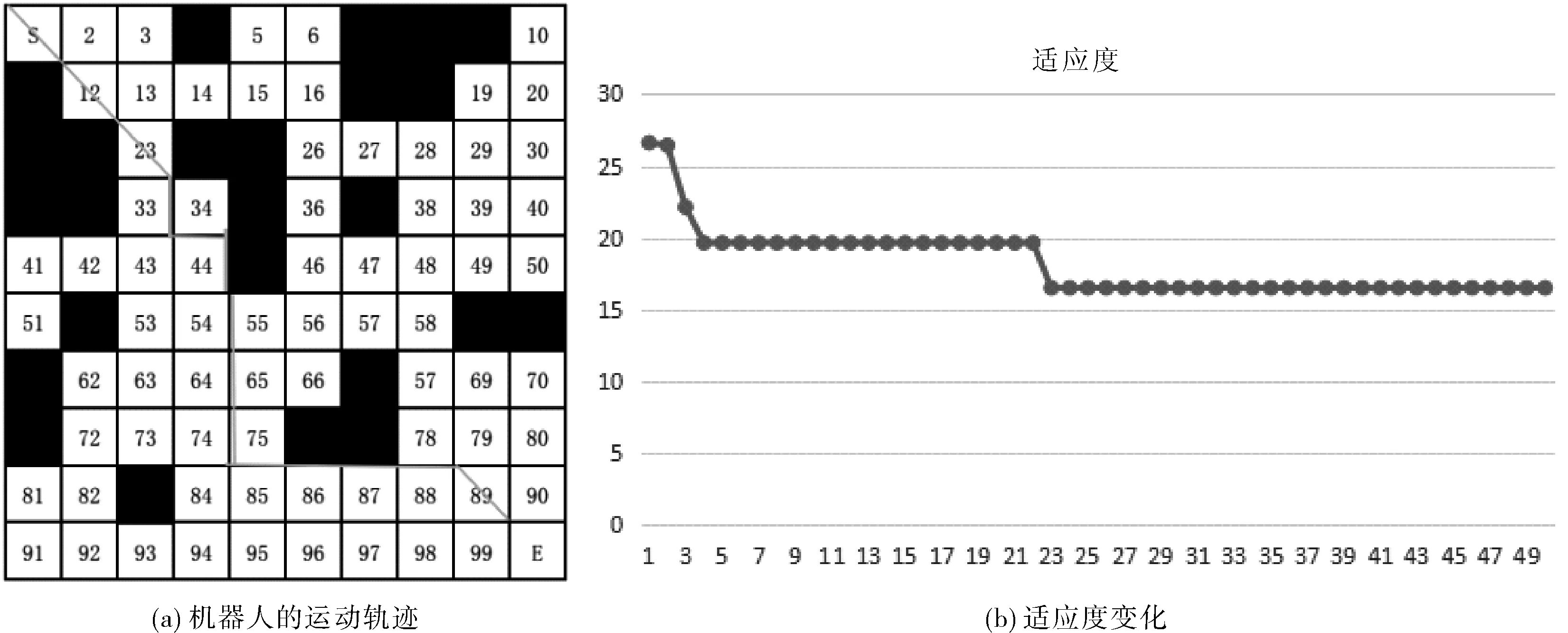
圖5 一般遺傳算法仿真結果
圖6 混合遺傳算法仿真結果