基于ORBCOMM 衛星機會信號的定位技術
2021-01-08 03:49:40秦紅磊譚滋中叢麗趙超
北京航空航天大學學報 2020年11期
關鍵詞:信號
秦紅磊,譚滋中,叢麗,趙超
(北京航空航天大學 電子信息工程學院,北京100083)
盡管全球導航衛星系統(Global Navigation Satellite System,GNSS)隨著位置服務需求的日益增長得到了快速的發展,但其存在信號弱、容易受到干擾等缺點,越來越多的備用導航定位技術被提出,以擺脫對GNSS系統的依賴。利用廣泛存在的無線電機會信號導航(Opportunistic Navigation,Op Nav)[1-2]及協作機會信號導航(Collaborative Opportunistic Navigation,COpNav)近年來得到了廣泛的關注[3]。典型系統如美國提出的全源導航(All Source Positioning and Navigation,ASPN)技術,該技術提出利用一切可以利用的信號資源實現融合導航定位;類似的還有英國國防部研發的Navsop(Navigation via Signals of Opportunity)系統。
機會信號功率強、占用頻譜寬、廣泛存在,因此具有抗干擾能力強且投入低的優點[4],而將低軌衛星無線電信號作為機會信號具有更廣的覆蓋范圍。目前,成熟的典型低軌衛星系統有銥星(IRIDIUM)、軌道通信衛星(ORBCOMM)和全球星(Globalstar)等[5-7]。Globalstar衛星系統和ORBCOMM衛星系統本身均具備位置信息服務,銥星公司2016年宣布在第二代衛星 IRIDIUM NEXT系統中增加了定位服務,然而以上低軌衛星定位服務需授權才可使用。
國外計劃未來建造大量低軌衛星系統,2015年OneWeb公司宣布在未來構建一個含有648顆衛星的低軌衛星系統[8];同年SpaceX和Google宣布合作構建一個含有更多衛星的低軌衛星系統,共含有4 000顆衛星[9];三星公司也計劃在未來建立含有4 600顆低軌衛星的衛星系統[10];Boeing公司也啟動了構建低軌衛星系統計劃[11]。國內也計劃發射大量的低軌衛星,如鴻雁全球衛星星座、虹云工程計劃。現有低軌衛星系統和未來計劃發射的大量低軌衛星為基于低軌衛星機會信號的定位技術提供了基礎。
本文研究將低軌衛星作為機會信號源,在不需要授權下即可利用低軌衛星實現定位。在前期研究中,利用銥星(IRIDIUM NEXT)機會信號實現了定位[12]。本文主要研究將另一種低軌衛星(ORBCOMM)信號作為機會信號實現定位。由于ORBCOMM 衛星機會信號僅部分信息已知,重點分析信號體制并給出定位觀測信息獲取方法。提出利用瞬時多普勒定位方法實現定位,給出了詳細的定位數學模型,對多普勒定位幾何精度因子的物理意義進行了解釋。通過搭建衛星信號采集平臺,實現了實際衛星信號的定位。首先,對ORBCOMM 衛星機會信號通信體制進行了深入分析,為定位信息觀測量的獲取提供了基礎。其次,介紹了基于ORBCOMM 衛星機會信號的定位原理,給出了定位觀測信息多普勒頻率的估計方法,以及瞬時多普勒定位原理及數學模型,并闡述了多普勒定位幾何精度因子的物理意義。最后,利用實際接收的ORBCOMM第二代衛星(OG2)信號實現了定位,驗證了本文方法的有效性和正確性。
1 ORBCOMM 衛星軌道及信號體制
ORBCOMM衛星星座分布決定了接收機可見衛星數量,而定位觀測信息提取方法與信號體制有關,本節主要分析ORBCOMM 衛星星座結構和信號體制特性。
ORBCOMM衛星通信系統是能夠實現數據全球通信的衛星系統[13]。ORBCOMM 空間星座最初計劃如圖1所示。主星座4個軌道平面(A,B,C,D),每個平面均勻配置8顆星,軌道高度為825 km,傾角為45°;輔助星座2個軌道平面(G,F),每個平面配置2顆星,傾角分別為108°和70°,軌道高度為775 km;赤道面(E)曾設6顆高度為975 km的衛星[14]。ORBCOMM 公司于2008年宣布部署第二代衛星(OG2)星座。目前,共12顆OG2衛星在軌運行,均勻分布在4個主軌道平面。OG2衛星軌道高度為620 km,軌道傾角為47°,軌道周期為97 min。本文采用OG2衛星實現接收機定位。
ORBCOMM衛星下行鏈路占用頻帶為137~138 MHz,共包括13個信道,頻帶分配如圖2所示。12個帶寬為25.0 kHz的信道用于與用戶終端通信(采用FDMA多址連接),另外1個帶寬為50.0 kHz的信道用于與關口站通信。所有ORBCOMM衛星共用12個用戶鏈路下行信道,頻率復用次數為4次[15]。本文主要采用衛星至用戶下行鏈路信號實現定位。
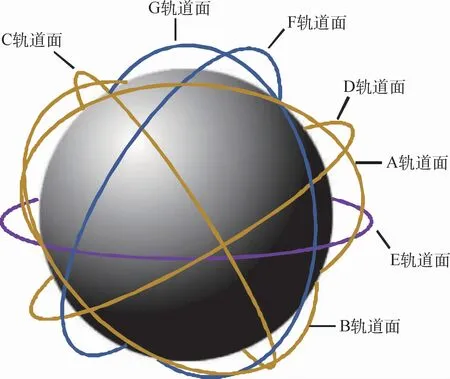
圖1 ORBCOMM系統星座計劃Fig.1 ORBCOMM system constellation plan
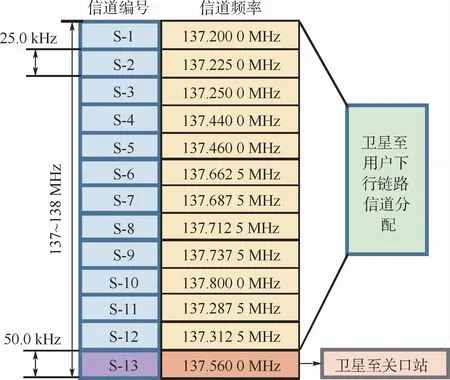
圖2 ORBCOMM衛星下行鏈路頻帶分配Fig.2 ORBCOMM down link frequency band assignment
用戶下行鏈路采用SDPSK(Symmetrical Differential Phase Shift Keying)調制方式,數據率為4 800 bit/s。調制采用0數據狀態和1數據狀態分別引起相位負90°和正90°變化。
采集的實際信號顯示每顆OG2衛星最多同時在2個信道內發射信號,所占信道頻帶在幾天內保持不變。ORBCOMM 衛星在用戶下行鏈路內持續發射SDPSK調制的信號,為提取定位觀測信息并最終實現接收機定位提供了基礎。
2 ORBCOMM 定位方法
接收機定位需要觀測信息、衛星軌道和定位解算,本文利用ORBCOMM OG2衛星的多普勒頻率作為定位觀測信息,采用公開的TLE數據及軌道預測模型[16]計算OG2衛星軌道,定位方法采用瞬時多普勒定位技術。本節主要給出了OG2衛星多普勒頻率的估計方法,并介紹了瞬時多普勒定位原理及數學模型。
2.1 ORBCOMM 衛星機會信號多普勒頻率估計
OG2衛星機會信號到達地面功率一般高于噪聲,然而相比于直接通過快速傅里葉變換(Fast Fourier Transform,FFT)處理并根據頻譜對稱性或峰值譜線對應的頻率獲得多普勒頻率粗測量的其他信號,SDPSK調制的OG2信號無法通過其頻譜直接獲得多普勒測量值。另外,采用最大似然估計(Maximum Likelihood Estimation,MLE)方法[17]進行多普勒精確測量時,根據多普勒粗測量值產生的本地載波與OG2信號進行相關時,相關峰會受到數據位的影響。綜上,本文先對OG2衛星機會信號平方處理獲得2倍頻信號,再利用FFT和MLE方法估計多普勒頻率。
SDPSK調制信號表達式為
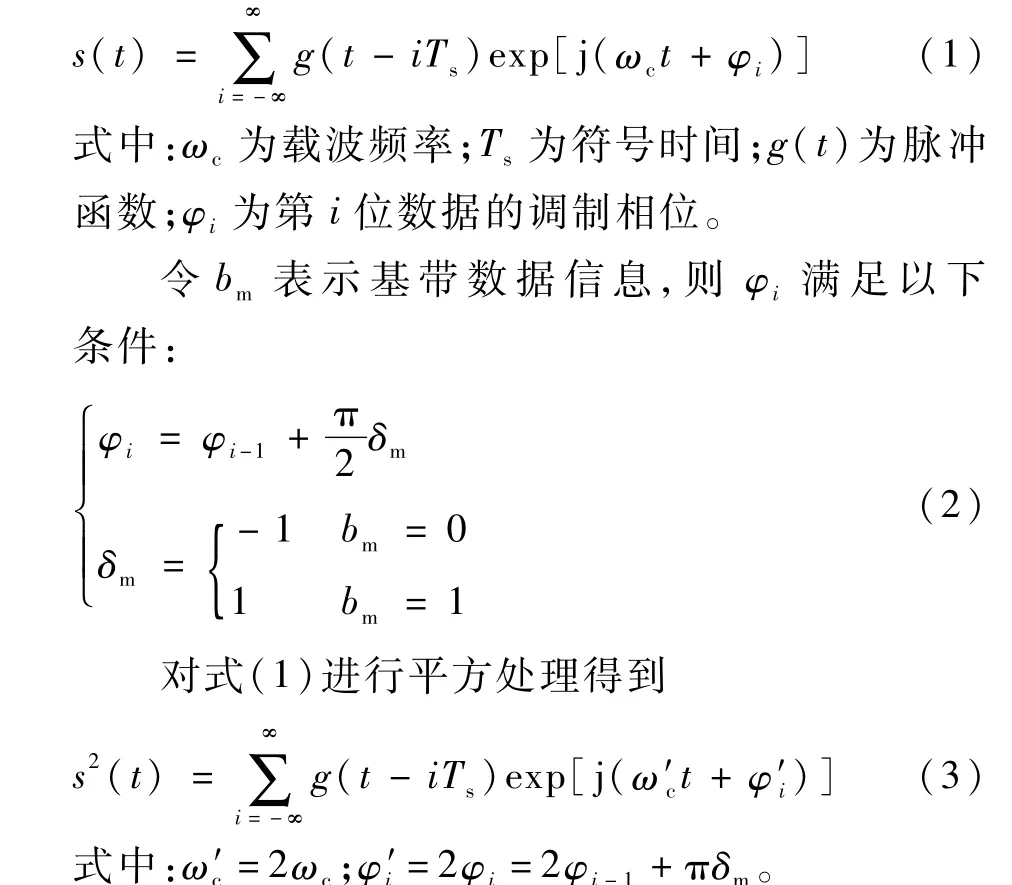
可以看出,平方后的信號碼元相位變化為±π,是一種基帶信號為0/1交替的特殊BPSK調制信號。基帶信號不斷重復0/1交替過程中,信號頻譜分別在中心頻率的左右兩側對稱出現峰值譜線,其間距為碼速率大小。令平方后的信號頻譜中的2個峰值譜線對應頻率分別為f1和f2且f1<f2,則原始信號中心頻率f表達式為
式中:I(f)為最優估計函數;f為載波頻率估計;x[n]為平方信號。
2.2 ORBCOMM 衛星多普勒定位方法
接收機獲得ORBCOMM 衛星的多普勒頻率測量后,可采用瞬時多普勒定位方法實現定位解算。本節主要介紹利用ORBCOMM 衛星機會信號實現接收機定位解算的原理及數學模型。
接收機在某時刻接收到ORBCOMM 衛星機會信號并測量出多普勒頻率,其位置一定位于以ORBCOMM衛星為頂點的圓錐面上,且該圓錐面上所有點對應的多普勒頻率均相等。當接收機同時得到多個多普勒頻率時,通過多個等多普勒圓錐面的交點即可獲得接收機位置[18],此即為ORBCOMM衛星機會信號多普勒定位原理的幾何解釋。一般情況下,同時可見ORBCOMM 衛星個數至多2顆,對于位置保持不變的靜止接收機,可采用多歷元定位方法[19],即采用多個不同時刻的ORBCOMM衛星多普勒頻率實現接收機定位解算。
下面給出ORBCOMM 衛星多普勒定位的數學模型。靜止接收機在某一時刻測量得到的衛星多普勒頻率表達式為

式中:˙ρ為ORBCOMM衛星的多普勒頻率,m/s;ru為接收機位置向量;r和v分別為ORBCOMM 衛星位置矢量和速度矢量;fu為接收機鐘偏;ε˙ρk為多普勒頻率誤差。
式中:rk和vk分別為第k個多普勒頻率測量對應的ORBCOMM 衛星的位置矢量和速度矢量;E3×3為單位矩陣。
根據式(8)~式(10)得到ORBCOMM衛星多普勒定位線性導航狀態更新方程為
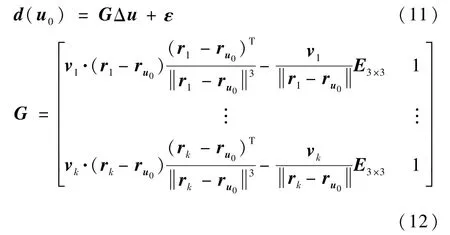
式中:Δu=[ΔruΔfu]為接收機狀態更新向量;G為多普勒定位雅可比矩陣;ε為測量和線性化誤差向量。
利用牛頓迭代運算,令ui和Δui分別表示第i次接收機狀態量估計和修正量,則第i+1次迭代解算的接收機狀態量估計ui+1的表達式為
多普勒頻率測量等效為速度時,DOPD的單位為s,物理意義代表接收機真實位置以ORBCOMM 衛星多普勒測量誤差的等效速度到達定位解算的位置所用的時間。
接收機持續獲得ORBCOMM 衛星多普勒頻率測量并利用TLE數據及軌道預測模型獲得衛星軌道后,即可利用上述多普勒定位方法實現基于ORBCOMM衛星機會信號的接收機定位。
3 實驗驗證
3.1 ORBCOMM 實際信號分析及多普勒頻率估計
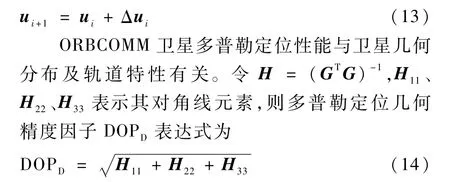
本節主要對實際采集的ORBCOMM 衛星(OG2)機會信號進行時頻域分析,并估計信號多普勒頻率。采集平臺主要包括天線、射頻前端和數據處理單元,采集系統框圖如圖3所示。
圖4給出了OG2衛星機會信號的實時頻譜。此時僅有一顆OG2衛星劃過接收機頭頂,該顆衛星同時在信道11和信道9發送信號,分別對應圖中A信號和B信號。2個信道的標準頻率分別為137.287 5 MHz和137.737 5 MHz。在137.5 MHz頻帶附近的C信號為硬件采集平臺射頻前端引起的噪聲信號。
圖5給出了OG2衛星機會信號的三維瀑布圖。可以看出,在9 min內可持續接收到OG2衛星信道9和信道11的信號,信號功率明顯高于噪聲。
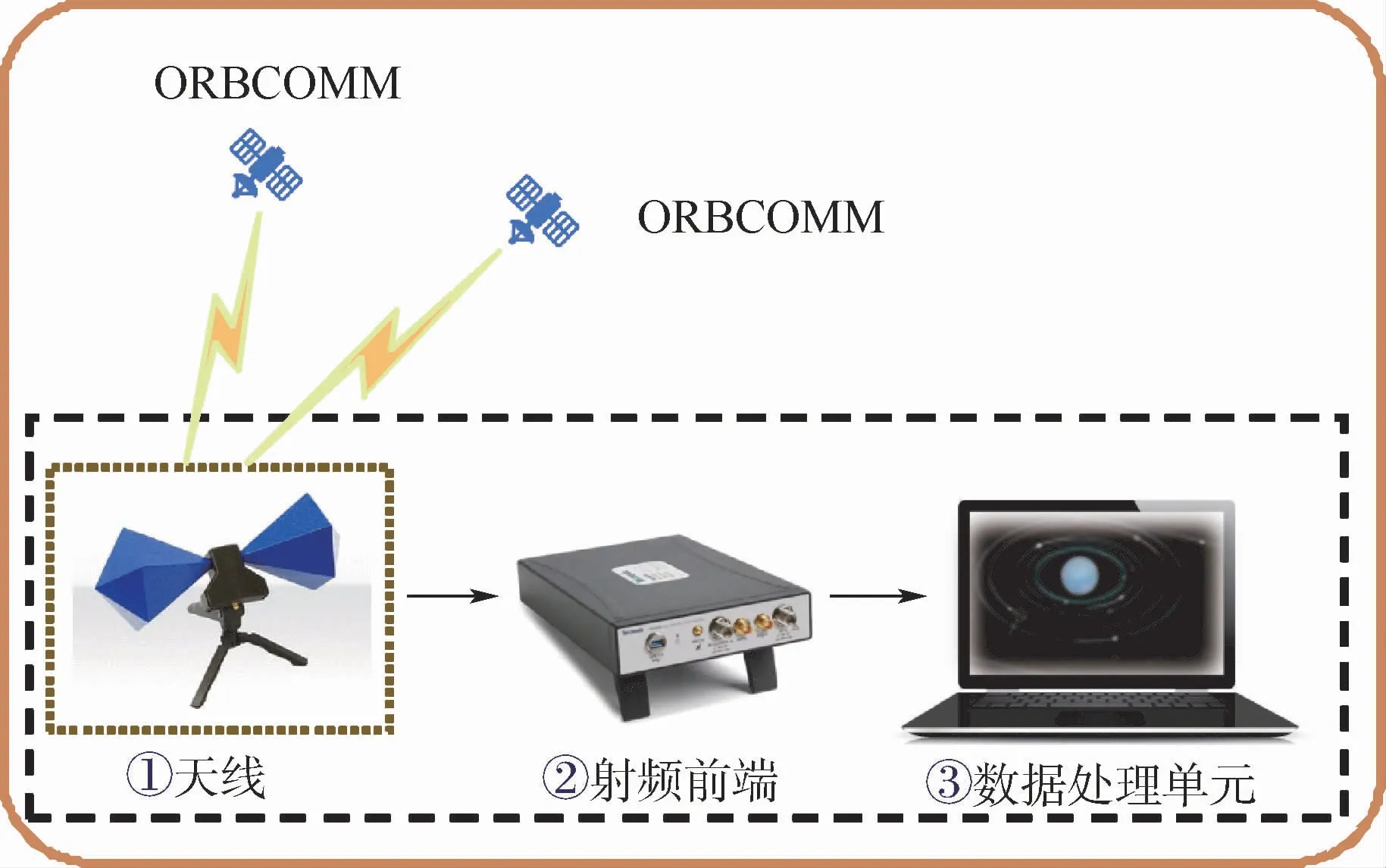
圖3 ORBCOMM衛星機會信號采集系統框圖Fig.3 Block diagram of ORBCOMM signals of opportunity collection system
圖4 ORBCOMM衛星用戶鏈路信道9和信道11信號功率譜Fig.4 Signal power spectrum of ORBCOMM user links channel 9 and channel 11
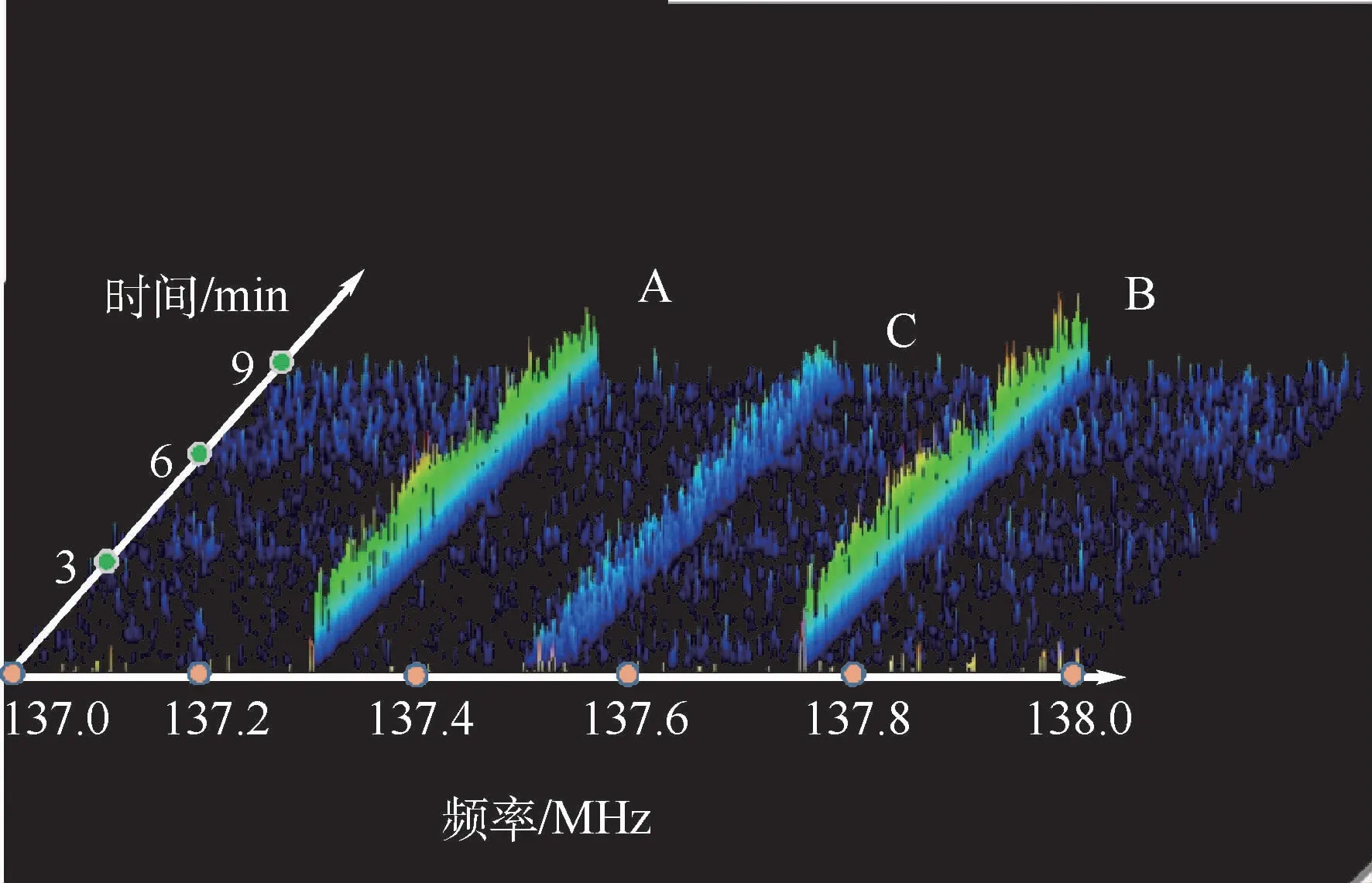
圖5 ORBCOMM衛星用戶鏈路信道9和信道11信號瀑布圖Fig.5 Signal waterfall plot of ORBCOMM user links channel 9 and channel 11
上述給出了OG2衛星機會信號實時分析結果,接下來將采集器中心頻率設置為138 MHz,持續采集數據5 min。OG2衛星信道9和信道11信號頻率經下變頻變為27.7375 MHz和27.2875 MHz。對采集的信號進行濾波處理得到相應信道信號數據,并估計信號多普勒頻率。
取100 ms的OG2衛星信道11信號進行平方處理并進行FFT變換后,可以獲得2個峰值譜線,如圖6所示。2個峰值譜線對應的頻率f1和f2分別為54 577234.8 Hz和54582034.8 Hz,2個譜線的距離為4 800 Hz,其值等于OG2衛星機會信號的數據率。根據式(4)可以獲得原始信號的中心頻率粗略估計結果為27 289 817.4 Hz,對應的多普勒頻率粗測量值為2 317.4 Hz。采用式(5)得到的信號中心頻率精測量值為27 289 816.1 Hz,則衛星信號數據的多普勒頻率精測量值為2 316.1 Hz。對OG2衛星信道9信號采用上述方法同樣可以獲得信號多普勒頻率。
實驗結果證明,OG2衛星持續在用戶下行鏈路發送信號,并且可采用本文方法估計信號多普勒頻率。
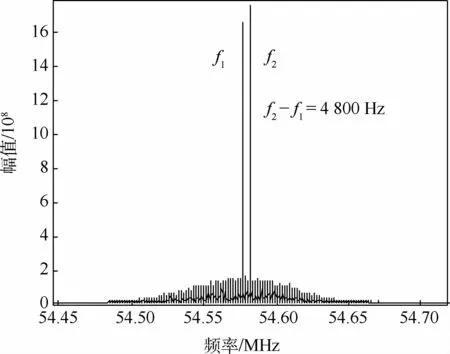
圖6 ORBCOMM衛星信道11信號平方處理后的頻譜Fig.6 Spectrum of ORBCOMM channel 11 signal after square processing
3.2 ORBCOMM 多普勒頻率定位
本節對OG2衛星機會信號進行長時間采集,測量衛星多普勒頻率,并結合衛星TLE軌道信息實現接收機靜態定位。
持續接收OG2衛星機會信號48 min,期間接收機保持靜止。將數據分為連續的多個360 ms數據塊,采用匹配濾波器對每個數據塊進行檢測,當存在衛星機會信號時,估計信號中心頻率和多普勒頻率。圖7給出此段時間內可見衛星的信號中心頻率估計結果。
可以看出,48 min內可見衛星共3顆:Sat1、Sat2和Sat3,每顆衛星同時在2個信道內發射信號,共6個信號中心頻率曲線,同一衛星不同信道信號的中心頻率曲線形狀大體相同。此段時間內任意時刻最多可見衛星1顆,Sat1和Sat3衛星星下點軌跡距離接收機較近且屬于同一軌道,在信道9和信道11發送信號,Sat2衛星在信道6和信道10發送信號。
Sat1和Sat3衛星的信道11信號及Sat2衛星的信道6的信號多普勒曲線如圖8所示。可以看到,ORBCOMM 衛星的多普勒范圍在±3 kHz之間。Sat1和Sat3衛星的信道9及Sat2衛星的信道10的信號多普勒曲線與圖8中對應衛星的多普勒曲線的形狀大致相同。
本文利用衛星多個歷元的多普勒頻率實現定位,分為2顆衛星和3顆衛星定位2種情況。2顆衛星定位時,觀測信息采用Sat1衛星信道11信號和Sat2衛星信道6信號的多普勒頻率。3顆衛星定位時,增加了Sat3衛星信道11信號的多普勒頻率觀測。
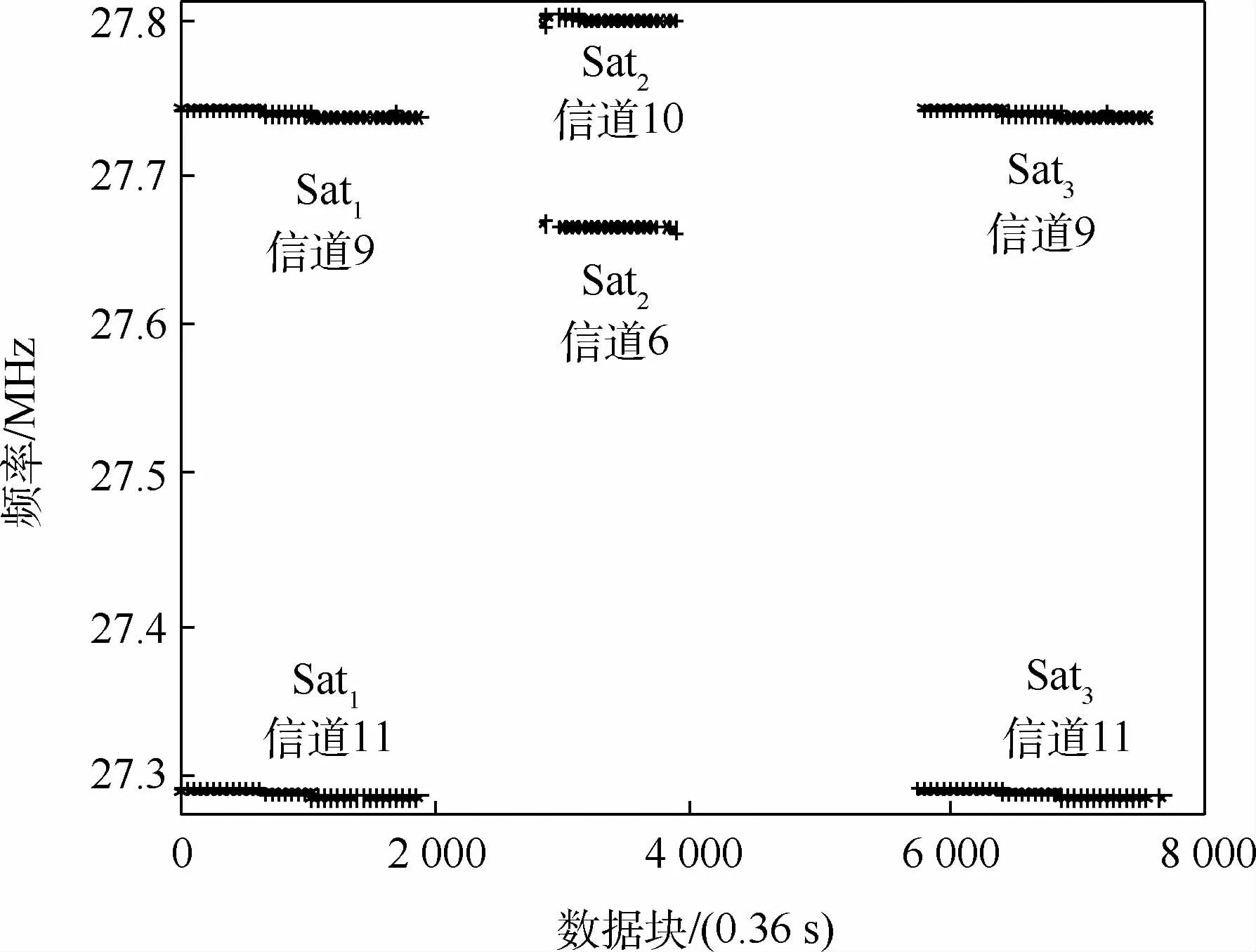
圖7 ORBCOMM衛星機會信號中心頻率曲線Fig.7 Center frequency curves of ORBCOMM signals of opportunity
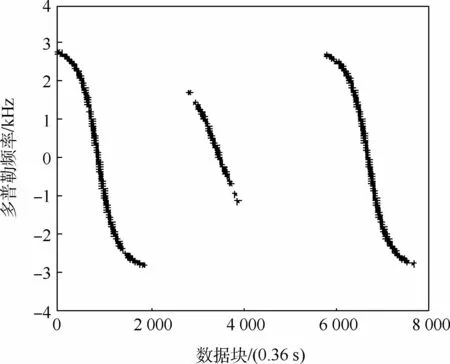
圖8 ORBCOMM衛星用戶鏈路信道6和信道11信號多普勒曲線Fig.8 Doppler curves of ORBCOMM userlinks channel 6 and channel 11 signal
首先,將每顆衛星所有不同時刻的多普勒頻率測量值均勻分組;其次,在每組中隨機選取一個測量值,不同衛星的共25個觀測歷元的多普勒頻率組合成定位觀測信息,并利用高程輔助[20]瞬時多普勒定位進行定位解算;最后,利用25個不同觀測歷元多普勒頻率進行組合800次,分別進行定位解算并統計定位誤差均值和RMS值。下面分別給出2顆衛星和3顆衛星情況下定位誤差的統計結果和分析。
表1給出了高程輔助情況下的定位誤差統計結果,此時高程輔助信息固定為高度真值。2顆衛星定位時,定位誤差主要分布在北向,誤差均值和RMS值均大于100 m,在東向上誤差具有較大的波動。當增加衛星個數時,東向誤差均值和RMS值變化較小,但北向誤差明顯有所改善,由于增加了衛星,改善了衛星幾何分布,使得東向和北向誤差RMS值都在80 m左右。
表2給出了無高程輔助和有高程輔助情況下的定位誤差對比結果。可以看出,高程輔助可以有效改善定位精度,2顆衛星情況下,三維定位(3D定位)誤差RMS值可以達到224 m,水平定位(2D定位)誤差RMS值可以達到174 m,3顆衛星情況下,三維定位(3D定位)誤差RMS值可以達到200 m,水平定位(2D定位)誤差RMS值可以達到120 m。
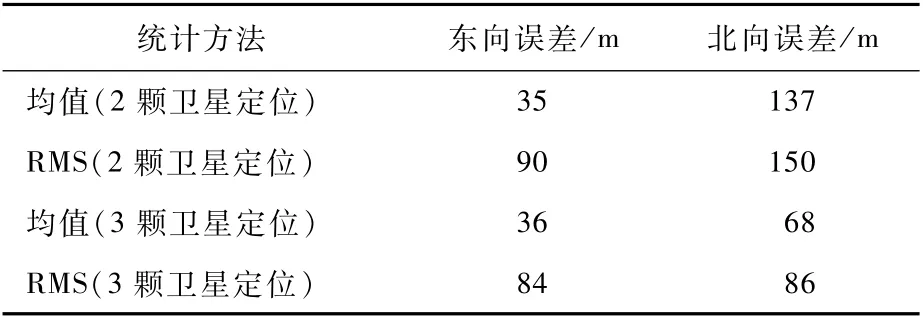
表1 高程輔助多普勒定位誤差統計結果Table 1 Error statistic r esults of Doppler positioning with height aid
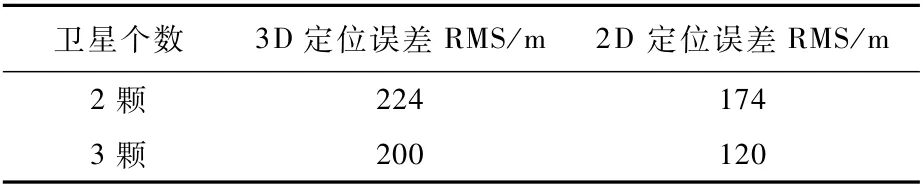
表2 有無高程輔助情況下的定位誤差結果對比Table 2 Comparison of error results of positioning with and without height aid
將高程輔助信息誤差固定在40 m范圍內,重復上述定位實驗。實驗結果顯示,此時高程輔助信息誤差對2顆衛星和3顆衛星定位的水平定位精度的影響均不超過15 m。綜上所述,利用實際ORBCOMM 衛星機會信號可以實現接收機定位,高程輔助誤差在40 m范圍內時,接收機水平定位精度可以達到140 m。
4 結束語
本文提出利用ORBCOMM 衛星機會信號實現接收機定位,并利用實際信號進行實驗驗證。
對SDPSK調制的ORBCOMM 衛星機會信號進行平方處理,并利用FFT和MLE方法有效測量多普勒頻率。利用瞬時多普勒定位方法,并結合軌道預測模型計算的衛星軌道信息可以實現接收機定位。實驗結果表明,在高程輔助情況下水平定位精度可以達到140 m,驗證了本文方法的正確性和有效性。為GNSS受到強干擾導致不能正常工作的環境下,提供一種有效的定位手段。
針對衛星機會信號定位技術,下一步主要研究聯合采用ORBCOMM 和IRIDIUM 兩種衛星機會信號實現接收機定位。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06