一種煤礦智能掘進系統
2021-01-10 03:24:47林軍杰
科學與生活 2021年26期
林軍杰

摘要:本文介紹了一種基于慣導+數字式全站儀實現精確定位的煤礦智能掘進機器人系統,該系統包括橫軸式掘進機器人、臨時支護機器人、鉆錨機器人、錨網運輸機器人、電液控平臺、通風除塵系統及運輸系統,解決了復雜地質條件下智能掘進的難題,提高了掘進效率,保障了安全生產。
關鍵詞:掘進,錨網,支護
1.項目背景:
我國雖然煤炭資源蘊藏豐富,但適用于露天開采的煤田極少,比美國、加拿大、俄羅斯的煤田復雜的多,地下井工開采是煤礦開采的主要方式。復雜地質條件下的快速智能掘進始終是個難題,同時,掘進裝備的自動化智能程度已成為制約煤礦提高生產能力的主要因素。面臨這種獨特的開采條件,集中力量研制一種全新的智能掘進機器人系統,就顯得尤為迫切。
2.設備介紹:
該智能掘進機器人系統基于慣導+數字式全站儀實現精確定位,包括依次布置于煤礦巷道內的橫軸式掘進機器人、臨時支護機器人、鉆錨機器人、錨網運輸機器人、電液控平臺、通風除塵系統及運輸系統。橫軸式掘進機器人位于臨時支護機器人的框架內,位于整個系統的最前方,利用臨時支護機器人一推一拉向前移動;鉆錨機器人、錨網運輸機器人和電液控平臺通過鉸接與臨時支護機器人串聯在一起,通過前方牽引前后移動,通過鉸接兩側的液壓缸微調左右位置;鉆錨機器人用于完成錨網永久支護的鉆錨任務,鉆錨機器人上安裝兩排鉆機,可以一次性完成永久支護,所有鉆機均可選裝90°,前后微調,實現所有頂部和側幫的支護,利用鉆錨機器人上搭載的傳感器和液壓伺服系統實現人工輔助的自動打鉆及自動上錨網;錨網運輸機器人通過機械手機構、傳感器及液壓伺服系統實現自動給鉆錨機器人上網和給第一錨網庫補網;臨時支護機器人包括臨時支護機器人Ⅰ和臨時支護機器人Ⅱ,用于實現對圍巖的及時支護和對機器人系統的自動拖動,具有超前鉆探、修幫、自動糾偏功能;運輸系統包括刮板運輸機、落地皮帶式轉載機、主運皮帶,掘進機器人開采的煤通過刮板運輸機傳輸到落地式轉載機上,落地式轉載機再將煤轉載到主運皮帶上,將煤運出;臨時支護機器人Ⅰ與刮板運輸機鉸接并帶動其向前移動,臨時支護機器人Ⅱ與落地式轉載機鉸接并帶動其向前移動;通風除塵系統通過外部管道將新鮮空氣送到前端,直達臨時支護機器人內部,右側定制的矩形管道為送新風管道,為工作人員提供新鮮空氣,右側方形管道為除塵口,通過負壓將煤塵帶走;運輸系統通過邁步式自移機尾拖動帶式輸送機向前移動,與煤巖運輸系統保持同步。如下圖。
1.橫軸掘進機器人2.臨時支護機器人3.鉆錨機器人4.錨網運輸機器人5.電液控平臺6.除塵系統7.運輸系統
2.1橫軸式掘進機器人
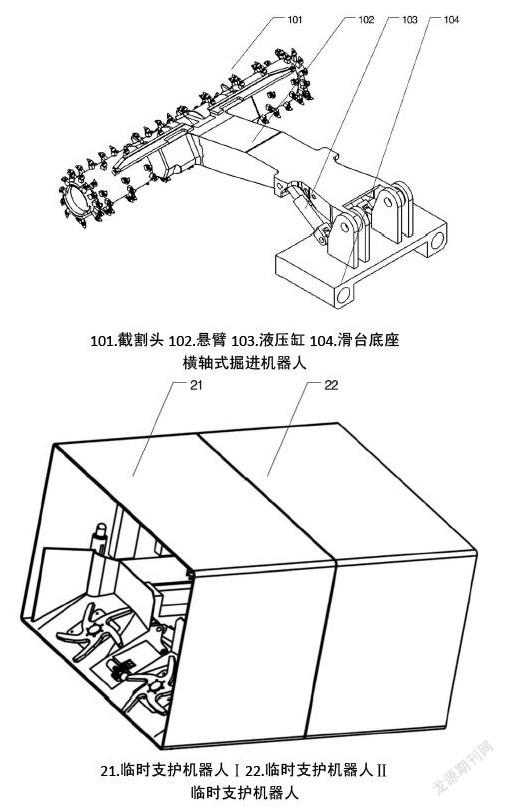
橫軸式掘進機器人包括橫軸截割頭、懸臂、一對液壓缸和滑臺底座。橫軸截割頭用于實現高效率截割,其內部液壓馬達伺服系統能實時反饋轉速和液壓壓力;一對液壓缸用于為懸臂提供上下擺動的動力,液壓缸上有位移傳感器,實時反饋懸臂位置;滑臺底座與臨時支護機器人Ⅰ底部通過軌道連接,并且通過滑臺底座可以帶動整個橫軸式掘進機器人前后移動。見下圖。
臨時支護機器人Ⅰ和臨時支護機器人Ⅱ通過前拉后推牽引系統前進。見下圖。
2.2鉆錨機器人
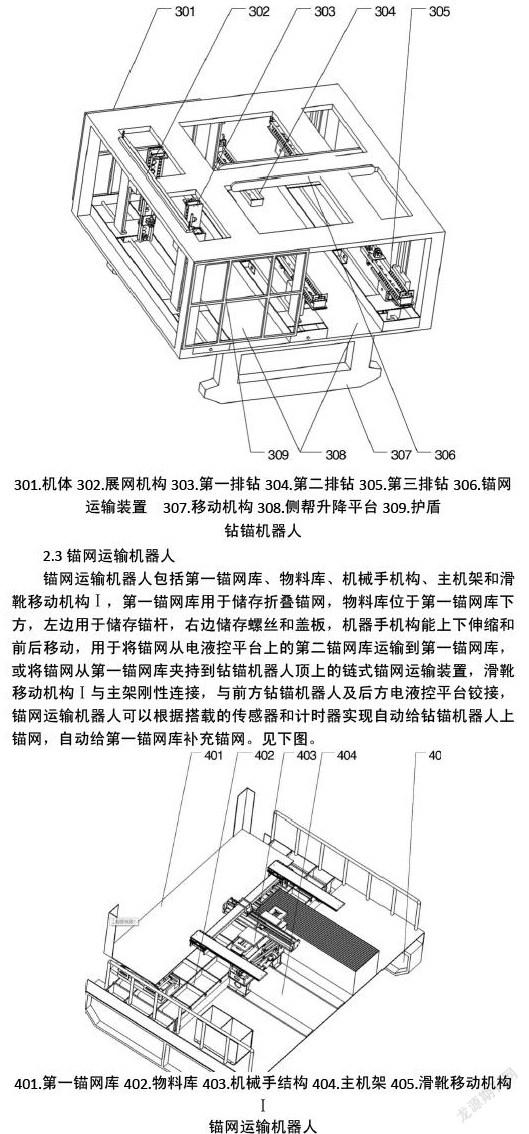
鉆錨機器人包括機體、展網機構、第一排鉆、第二排鉆、第三排鉆、錨網運輸裝置、移動機構、側幫升降工作平臺和護盾,機體與臨時支護機器人Ⅱ鉸接,通過兩側的液壓缸微調位置;護盾和展網機構用于將到達預定位置的折疊網打開,第一排鉆,第二排鉆和第三排鉆上布置的鉆機能左右和上下移動,且可以繞旋轉中心90°旋轉,所有錨桿鉆機具有角度微調功能,范圍為±5°,利用鉆機上布置的傳感器在人工裝上錨桿后可以實現一鍵打鉆和一鍵錨固功能,所有錨桿鉆機
101.截割頭102.懸臂103.液壓缸104.滑臺底座
橫軸式掘進機器人
21.臨時支護機器人Ⅰ22.臨時支護機器人Ⅱ
臨時支護機器人
具有獨立控制功能,頂部錨桿鉆機有污水收集功能;錨網運輸裝置安裝在機體頂部,與后面的錨網運輸機器人頂部平行,通過旋轉傳送裝置將錨網從錨網運輸機器人頂部運輸至機體前端預定位置,移動機構前端與臨時支護機器人鉸接;側幫升降工作平臺能根據作業人員需要升降。見下圖。
301.機體302.展網機構303.第一排鉆304.第二排鉆305.第三排鉆306.錨網運輸裝置 ?307.移動機構308.側幫升降平臺309.護盾
鉆錨機器人
2.3錨網運輸機器人
錨網運輸機器人包括第一錨網庫、物料庫、機械手機構、主機架和滑靴移動機構Ⅰ,第一錨網庫用于儲存折疊錨網,物料庫位于第一錨網庫下方,左邊用于儲存錨桿,右邊儲存螺絲和蓋板,機器手機構能上下伸縮和前后移動,用于將錨網從電液控平臺上的第二錨網庫運輸到第一錨網庫,或將錨網從第一錨網庫夾持到鉆錨機器人頂上的鏈式錨網運輸裝置,滑靴移動機構Ⅰ與主架剛性連接,與前方鉆錨機器人及后方電液控平臺鉸接,錨網運輸機器人可以根據搭載的傳感器和計時器實現自動給鉆錨機器人上錨網,自動給第一錨網庫補充錨網。見下圖。
401.第一錨網庫402.物料庫403.機械手結構404.主機架405.滑靴移動機構Ⅰ
錨網運輸機器人
2.4電液控平臺
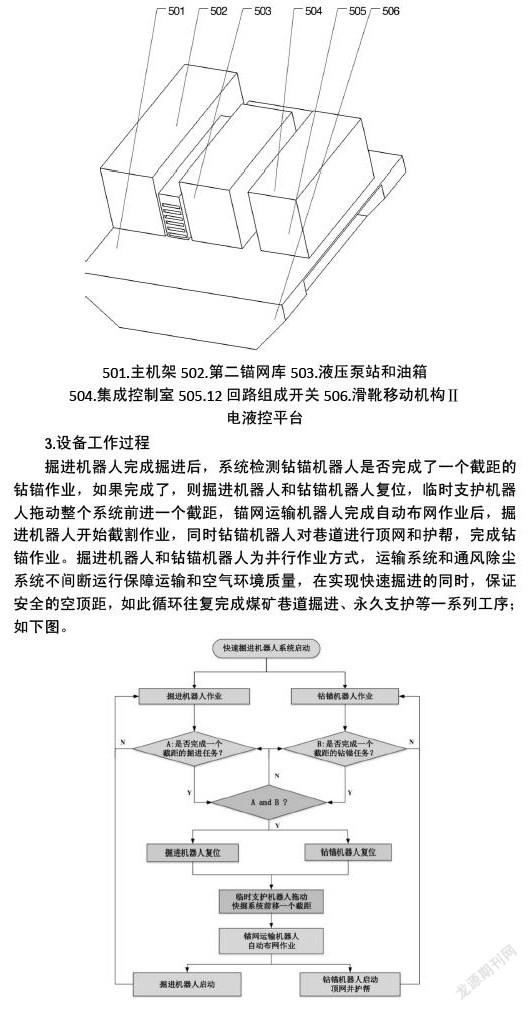
電液控平臺包括主機架、第二錨網庫、液壓泵站和油箱、集成控制室、12回路組成開關及滑靴移動機構Ⅱ,第二錨網庫用于儲存第一錨網庫儲存不下的錨網,液壓泵站和油箱提供整個系統的液壓動力,集成控制室集成了整個系統的控制和監控單元,監控并協同各個子系統工作,12回路組成開關負責接通系統的電液管路,且有清水進水管接口,以備鉆錨機器人,掘進機器人的用水,滑靴移動機構與錨網機器人鉸接,通過兩側的液壓缸微調相對位置。見下圖。
501.主機架502.第二錨網庫503.液壓泵站和油箱
504.集成控制室505.12回路組成開關506.滑靴移動機構Ⅱ
電液控平臺
3.設備工作過程
掘進機器人完成掘進后,系統檢測鉆錨機器人是否完成了一個截距的鉆錨作業,如果完成了,則掘進機器人和鉆錨機器人復位,臨時支護機器人拖動整個系統前進一個截距,錨網運輸機器人完成自動布網作業后,掘進機器人開始截割作業,同時鉆錨機器人對巷道進行頂網和護幫,完成鉆錨作業。掘進機器人和鉆錨機器人為并行作業方式,運輸系統和通風除塵系統不間斷運行保障運輸和空氣環境質量,在實現快速掘進的同時,保證安全的空頂距,如此循環往復完成煤礦巷道掘進、永久支護等一系列工序;如下圖。
在掘進機器人自動完成一個截距的掘進任務后,系統進入移動狀態,狀態燈閃爍,提醒工人進入安全位置,臨時支護機器人通過前拉后推使系統前進,掘進機器人開始下一截距的掘進任務,鉆錨機器人開始所在位置的錨網支護,鉆錨進行下一個錨網支護前,錨網運輸機器人將第一錨網庫的折疊錨網運到鉆錨機器人的鏈式錨網運輸機上,錨網運輸機器人通過自帶的計數器計算第一錨網庫內存儲的錨網數量,在錨網數量為零時,發動該信號至機械手,自動從電液控平臺上的第二錨網庫上給第一錨網庫補網,電液控平臺的集成控制室負責整個系統的狀態監視和各個子系統的協同和監視,并同步數據到井上監控室,在換班時,由下一個班組的工人和后勤工人通過礦井運輸裝置,補充錨網和其他物料,下班后完成基本檢測和系統廢料箱更換,在完成固定進尺或班次后設檢修班,進行系統檢修,確保系統穩定運行。
結語
煤礦智能掘進機器人系統能解決復雜地質條件智能掘進難題、提高了掘進效率、保障了安全生產,引領掘進技術革命,對于打造智能煤礦、構建智慧礦區具有里程碑式的重大意義和深遠影響。
作者簡介:
(1981.03——,男,漢族,陜西合陽人,工程師,大學本科,煤礦機電設備管理研究)