
基于Coretex-A53和Qt的智能車載系統設計
2021-01-12 10:49:42陳岳煜師文慶
機電工程技術 2020年11期
陳岳煜,師文慶
(廣東海洋大學電子與信息工程學院,廣東湛江 524088)
0 引言
智能車載系統是近年來發展起來的一種新型車載系統,過去車載系統從原先僅能單純提供CD播放及車輛狀態,一直發展到近年隨著3G/4G/5G 等互聯網技術、半導體傳感器技術、電子信息技術和嵌入式行業的不斷發展和融合,特別是近年來人工智能技術的快速發展和5G技術的出現,人們對智能車載系統的要求也越來越高,希望其擁有更多更加方便實用的功能[1-3]。
現階段,汽車對人們來說早已不是單一的交通工具,汽車的數字化、智能化、多功能化是未來汽車電子產品的必然趨勢[4]。如今,某些高端車的智能車載系統上已經整合了以前人們需要獨立購買配置的電子產品功能,包括汽車導航、多媒體功能、行車雷達、互聯網通信等許多功能,特別是近些年來,在AI 人工智能的發展下,各大生產廠商還在智能車載系統上加上了AI 機器人語音助手、自動駕駛等功能。隨著5G時代的到來,物聯網技術越來越多被人們應用到汽車領域,智能汽車車載系統已經是一個重要的研究方向[5-6]。
基于Coretex-A53和Qt的智能車載系統,硬件平臺由基于ARM公司的Cortex-A53架構的S5P6818芯片為核心的Linux開發板,軟件上由Linux系統上的Qt集成開發環境進行開發,主要為用戶提供了音樂播放、行車記錄儀、倒車雷達、系統設置等功能[7]。
1 硬件實現
1.1 Arm Cortex-A53
ARM 處理器是由英國Acorn 有限公司設計的低功耗成本的第一款RISC微處理器,其廣泛地使用在許多嵌入式系統設計,具有低功耗、高性能、性比價比高等優點。ARM Cortex-A53 進一步擴大ARM 在高性能與低功耗領域的領先地位,Cortex-A53 是實現ARM Holdings 設計的ARMv8-A 64 位指令集的前兩個微體系結構之一。Cortex-A53 是一個超標量處理器,能夠雙重發出一些指令[8]。
Cortex-A53 是全球最小的64 位ARM 的應用處理器之一,具有雙向超標量,是一個有序執行流水線的8 級流水線處理器。該處理器的每個核心都必須使用DSP 和NEON SIMD 擴展,硬件虛擬化支持,板載VFPv4 浮點單元,64 字節緩存行,TrustZone 安全擴展,10 項L1 TLB 和L2 TLB,4 KiB 條件分支預測器,256項間接分支預測器。
硬件平臺所選用的是基于Arm Cortex-A53架構的S5P6818的核心板,此核心板PCB采用了10層的沉金工藝設計,具有良好的電氣特性和抗干擾特性,工作穩定可靠,集成了千兆以太網,可以應用于多個領域。該平臺擁有超高性能,最高主頻高達1.4 GHz,可應用于嵌入式Linux和Android等操作系統的驅動、應用開發[9]。
該處理器能支持全格式視頻解碼,在LCD 控制器上,芯片板的顯示控制接口有MIPI、RGB、LVDS三路,顯示分辨率可達2048×1280,60 Hz。
1.2 LCD電容觸摸屏
硬件平臺上所使用的屏幕是7 寸電容觸摸顯示屏,大小為800 mm×480 mm,此觸摸屏與Linux 系統兼容,可以通過Linux 的內核文件來使用此觸摸屏的顯示和觸屏功能,提供GUI界面給用戶,方便用戶使用操作。
1.3 USB攝像頭
所選用的攝像頭為創新USB 攝像頭,沒有麥克風功能,支持常用的攝像頭功能,同時支持V4L2 格式,Linux 系統可以通過V4L2庫把攝像頭獲取到的每幀畫面在LCD屏幕上實時地顯示出來。
1.4 HC-SR04超聲波模塊
HC-SR04 超聲波模塊CS100A,性能穩定、測量距離精確,感應角度不大于15°,精度可達3 mm,探測距離為2~450 cm。圖1所示為超聲波模塊HC-SR04的實物圖。
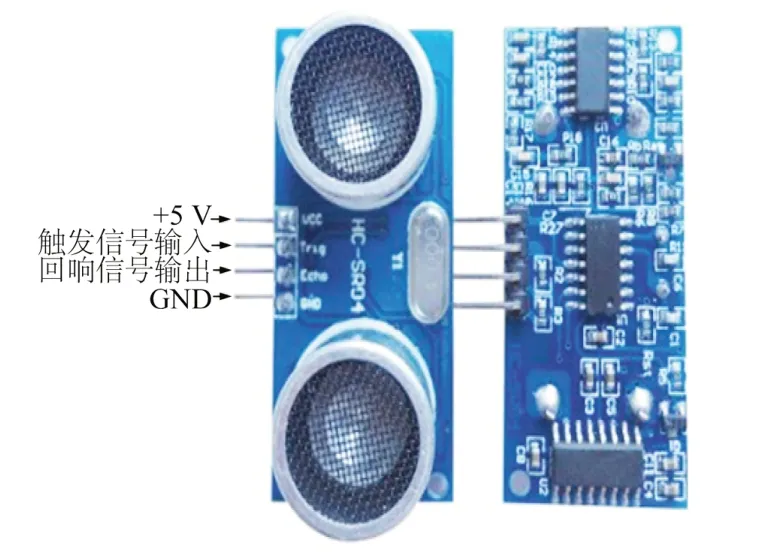
圖1 超聲波模塊HC-SR04實物圖
超聲波模塊的測量距離計算公式:
式中:L為測量距離;t為高電平時間。
圖2所示為超聲波模塊HC-SR04的應用電路圖。HC-SR04的一個控制口發出一個持續時間超過10 μs的高電平,待接收口有高電平輸出時,開定時器計時,該端口輸出為低電平時,讀取定時器的值。然后通過上式的超聲波測距的計算公式計算出待測距離。如圖3所示為HC-SR04測距的時序圖。

圖2 HC-SR04 電路原理圖
2 軟件實現
軟件方面主要是對此車載系統的界面和功能進行實現,首先是通過移植相應的庫到Linux 開發板上,有mplayer 庫、jpeg庫、v4l2庫和qt-arm庫。
圖4 是所示為軟件的流程圖,軟件的設計可分為5 大模塊:主界面、音樂播放器、行車記錄儀、設置、倒車雷達。主界面可以顯示系統當前的時間、通過http 協議獲取當地天氣、狀態欄和可以使用的軟件;音樂播放器模塊通過調用mplayer庫,讓用戶可以實現對歌曲的播放狀態、音量、播放順序等進行調整,還可以選擇顯示歌詞,被選擇的歌詞就會隨著歌曲的播放進度滾動地顯示在屏幕上。行車記錄儀模塊通過調用USB 攝像頭和v4l2 庫,把攝像頭捕捉到的每一幀畫面實時顯示到屏幕上,實現對汽車周圍環境的實時監測;設置模塊用戶可調整系統的時間和語言,語言通過Qt國際化的語言家功能進行實現,用戶可選擇中文或者英文,時間可以調整系統當前的日期和時間[10];圖5所示為倒車雷達的啟動運行流程,倒車雷達使用了攝像頭和超聲波模塊,攝像頭實時顯示汽車在倒車時后面的畫面,同時超聲波模塊會獲取汽車與后方障礙物的距離然后傳送給系統,系統會把距離顯示在屏幕上,當小于一定距離時,系統會播報語音提醒用戶注意停車,超聲波模塊和模擬掛擋的按鍵模塊都是通過Linux內核驅動的方式實現,把功能驅動成功后裁剪進開發板上的Linux系統,通過調用ioctl函數來訪問相關驅動得到數據[11]。

圖3 HC-SR04時序圖

圖4 軟件主流程圖
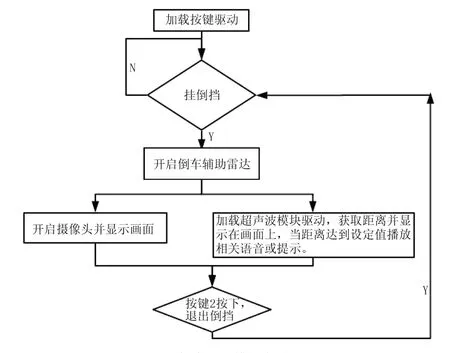
圖5 倒車雷達模塊啟動流程
3 結果分析
3.1 結果
本設計是基于Coretex-A53和Qt的智能車載系統,實現了音樂播放、行車記錄儀、倒車雷達、語言切換、天氣狀況、時間設置等多種功能。
系統啟動后進入啟動動畫,顯示軟件Logo、加載動畫、版本和版權等信息,如圖6所示。當系統加載完畢后自動跳過此界面進入系統主界面,如圖7所示,主界面顯示當前日期、時間、城市、天氣狀況、系統軟件和狀態欄,用戶可通過觸摸屏幕選擇要使用的軟件。

圖6 系統啟動畫面

圖7 系統主界面
圖8 所示為音樂播放器軟件界面,用戶可以播放系統上的音樂,通過虛擬按鍵可以調整歌曲進度、聲音、播放順序、播放列表、歌詞等功能。圖9 所示為行車記錄儀軟件界面,在屏幕上實時顯示當前攝像頭捕捉到的畫面。

圖8 音樂播放器界面

圖9 行車記錄儀界面
圖10所示為倒車雷達軟件界面,在屏幕上實時顯示當前攝像頭的畫面和超聲波模塊探測的距離。

圖10 倒車雷達界面
圖11~12分別為語言設置和時間設置界面,語言可選擇中文或英文,時間可根據自己需要的進行調整。

圖11 語言設置界面

圖12 時間設置界面
3.2 分析
基于ARM Cortex-A53架構的開發板作為硬件平臺,實現了低功耗、高性能、性比價比高等目的;用Qt進行開發,利用Qt強大的移植能力,對多平臺都支持,從而使本設計具有較好的移植性,方便不同平臺的用戶使用;選擇Linux 系統,基于Linux系統本身強大的功能和開源性,使得本設計在制作過程中節省了很多精力和時間,同時也讓本設計有了許多強大的功能。
本設計的智能車載系統上搭載了音樂播放、行車記錄儀、倒車雷達、語言切換、天氣狀況、時間設置等軟件,為用戶提供了多種方便實用的功能,實現了集安全、娛樂、操作方便、高性價比等多種優點的智能車載系統。
4 結束語
本系統旨在設計一種功能完善的智能車載系統,為車主們提供更加方便快捷的服務,同時也是對目前市面上智能車載系統的功能進行整合完善。該系統是基于Cortex-A53 和Qt的智能車載系統,具有音樂播放、行車記錄儀、倒車雷達、天氣預報、時間設置等多種功能。另外,基于Qt國際化模塊功能讓此系統具有國際化,支持多種語言轉換,實現了集安全、休閑、娛樂、網絡、強實用性和高可靠性等多種優點與一體的現代化多功能智能車載系統。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2020年13期)2020-08-24 08:22:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
制造技術與機床(2017年5期)2018-01-19 02:49:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
濰坊學院學報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04
