青貯玉米新品種比較試驗
2022-08-11 01:18:32楊小亮王忠奎董新全
天津農(nóng)業(yè)科學(xué) 2022年7期
關(guān)鍵詞:產(chǎn)量
楊小亮,王忠奎,董新全
(1.天水國家農(nóng)業(yè)科技園區(qū)管理委員會,甘肅 天水 741030;2.天水市秦州區(qū)農(nóng)業(yè)農(nóng)村局,甘肅 天水 741000)
青貯玉米株型高大、莖葉繁茂,鮮草產(chǎn)量在5~6×10kg·hm左右。作為青貯飼料,青貯玉米氣味芳香、柔軟多汁,不僅適口性好,而且原料中保持的養(yǎng)分含量多、營養(yǎng)價值高,是畜牧業(yè)冬春季節(jié)主要的飼料之一。隨著天水畜牧養(yǎng)殖業(yè)的蓬勃發(fā)展,青貯飼料的需求量逐年增加,天水市秦州區(qū)青貯玉米的種植面積呈逐年增長的趨勢。由于青貯玉米種植技術(shù)不規(guī)范、栽培管理水平不高、適宜種植的優(yōu)質(zhì)高產(chǎn)品種少等因素,秦州區(qū)青貯玉米產(chǎn)量不高、品質(zhì)不佳、產(chǎn)業(yè)發(fā)展緩慢,這些成為制約秦州區(qū)畜牧養(yǎng)殖業(yè)快速健康發(fā)展的瓶頸因素。為此,本研究引進了‘09-7A’、‘沈黃1131’、‘興玉998’、‘龍輻單208’、‘強盛30’、‘晉農(nóng)科1號’、‘天山1號’、‘青貯2’等15個近年來在其他地區(qū)綜合表現(xiàn)比較好的青貯玉米新品種,并做了品比試驗,旨在從中篩選出優(yōu)質(zhì)高產(chǎn)、適宜天水市秦州區(qū)大面積推廣種植的青貯玉米優(yōu)良品種,促進青貯玉米品種的更新?lián)Q代,助推畜牧養(yǎng)殖業(yè)快速發(fā)展。
1 材料和方法
1.1 試驗地概況
試驗設(shè)在天水市秦州區(qū)天水鎮(zhèn)楊灣村,海拔1 610 m,土質(zhì)屬于砂質(zhì)壤土,前茬種植作物為小麥。播種前進行耕翻,使地塊達到深、平、綿、細的試驗用地要求,同時結(jié)合地塊耕翻施入腐熟農(nóng)家肥60 t·hm,溝施尿素0.45 t·hm,過磷酸鈣0.6 t·hm作為基肥。
1.2 參試品種
試驗共安排15個參試品種,分別為‘09-7A’、‘沈黃1131’、‘金剛50’、‘中北410(14-2)’、‘青貯2’、‘09-1B’、‘興玉998’、‘龍輻單208’、‘強盛30’、‘晉農(nóng)科1號’、‘YA04889’、‘Y8’、‘龍輻玉6’、‘DF-3’、‘天山1號’。
1.3 試驗設(shè)計與處理
1.3.1 試驗設(shè)計 參試品種15個,采用隨機區(qū)組設(shè)計,3次重復(fù)。小區(qū)長6 m,寬3.3 m,小區(qū)面積19.8 m,寬窄行種植,寬行65 cm,窄行45 cm,平均行距55 cm,株距30.3 cm,每個小區(qū)定植120株(每個小區(qū)種植3壟,每壟2行,每行定植20株),種植密度60 000株·hm左右。
1.3.2 栽培管理 試驗于2021年5月15日播種,5月24日起開始出苗,6月13日間苗,6月25日結(jié)合間苗封膜口追施尿素0.3 t·hm,6月22日、7月12、8月5日進行行間除草各1遍。6月22日、7月13日、8月13日用20%殺滅菊酯2 000倍液噴霧各1遍防治玉米螟。同時,在生長期觀察記載各農(nóng)藝性狀,于蠟熟期收獲。收獲時,在各區(qū)組內(nèi)隨機連續(xù)抽取10株測產(chǎn),測定其鮮生物量、株高、莖粗、穗位、鮮草量等生物學(xué)性狀指標。將采收的果穗在105℃條件下殺青1 h,在70~80℃條件下烘干,測其籽粒干質(zhì)量,并確保各數(shù)據(jù)真實有效。
2 結(jié)果與分析
2.1 不同品種之間生育期比較
由表1可知,參試品種大多數(shù)屬于中晚熟品種,少數(shù)幾個屬中早熟品種。生育期介于101~129 d之間,其中‘天山1號’、‘龍輻玉6’和‘龍輻單208’成熟時間較其他品種早,生育期分別是101,101,105 d,最晚的是‘YA04889’,生育期達129 d。單從生育期比較來看,早熟品種比晚熟品種提前了26 d,但從生產(chǎn)實踐來看,所有參試品種在秦州區(qū)淺山半干旱區(qū)地膜覆蓋條件下都能夠成熟,且都能表現(xiàn)各自的豐產(chǎn)性。

表1 不同品種生育期記載表
2.2 不同品種農(nóng)藝性狀和抗逆性比較
由表2可知,15個參試品種從株型方面看,‘Y8’和‘天山1號’2個品種表現(xiàn)為松散型,‘龍輻玉6’表現(xiàn)為平展型,‘中北410(14-2)’、‘強盛30’和‘YA04889’3個品種株型為緊湊型,‘09-7A’、‘沈黃1131’、‘金剛50’、‘青貯2’、‘09-1B’、‘興玉998’、‘龍輻單208’、‘DF-3’和‘晉農(nóng)科1號’9個品種株型為半緊湊型。
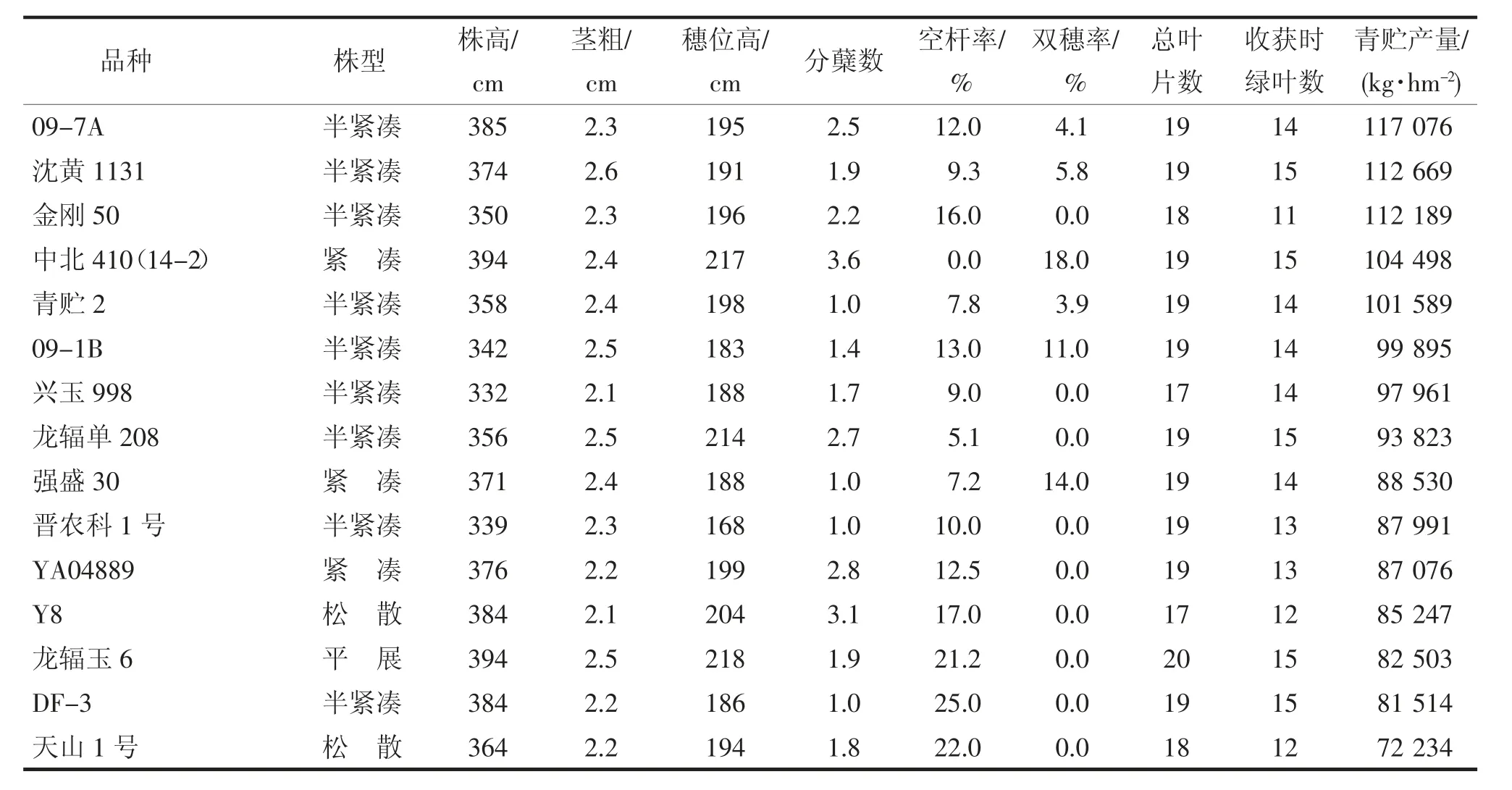
表2 不同品種生產(chǎn)性狀及生物產(chǎn)量統(tǒng)計表
從株高和穗位高度方面看,‘中北410(14-2)’和‘龍輻玉6’,2個品種植株高度和穗位較高,分別為394,394,217,218 cm;其次是‘09-7A’,株高385 cm,穗位高195 cm;植株高度和穗位高度最低的是‘興玉998’,株高只有332 cm,穗位高度188 cm。在雙穗率方面,‘中北410(14-2)’的雙穗率達18%,而‘金剛50’、‘興業(yè)998’、‘龍輻單208’、‘晉農(nóng)科1號’、‘YA04889’、‘Y8’、‘龍輻玉6’、‘DF-3’和‘天山1號’9個品種表現(xiàn)為雙穗率較低或僅表現(xiàn)為單穗。從分蘗方面看,‘中北410(14-2)’和‘Y8’分蘗數(shù)最多,分別是3.6%,3.1%;其次是‘YA04889’,分蘗數(shù)為2.8%;分蘗較少的是‘青貯2’、‘強盛30’、‘晉農(nóng)科1號’、‘DF-3’4個品種表現(xiàn)為不分蘗或單桿。
從莖粗方面看,‘沈黃1131’莖粗最粗,莖粗為2.6 cm;其次為‘龍輻單208’,莖粗為2.5 cm;莖粗較細的為‘興玉998’和‘Y8’,莖粗為2.1 cm。莖粗可以反映出參試品種的生長勢強弱。由此可知,‘沈黃1131”生長勢較強,而‘興玉998’和‘Y8’生長勢較弱。
在病害方面,所有參試品種都輕感小斑病,病害較重的為‘沈黃1131’和“Y8’,其余品種病害發(fā)生較輕,發(fā)病呈零星發(fā)病或不發(fā)病,所有參試品種對其他病害都表現(xiàn)出較強的抗性。在蟲害方面,所有品種都受到玉米螟不同程度的危害,其中受害最重的是‘興玉998’,蟲害率達43%,其次為‘強盛30’,蟲害率達35%(表3)。這說明參試品種都對玉米螟抗性較差,同時玉米螟是天水市秦州區(qū)主要發(fā)生的玉米害蟲,需要時刻警惕并及早進行防治。
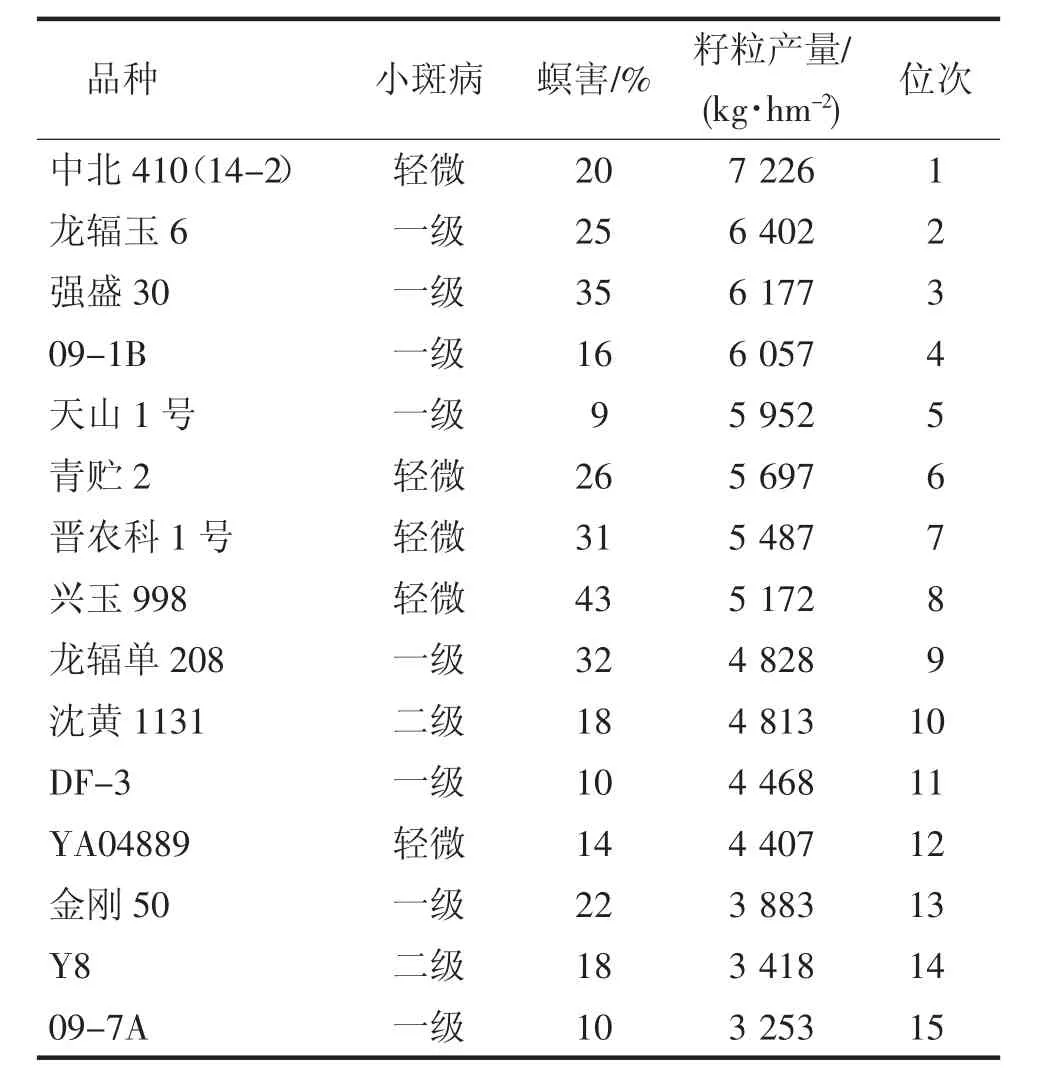
表3 不同品種經(jīng)濟產(chǎn)量統(tǒng)計表
從總?cè)~片數(shù)和收獲時綠葉數(shù)方面看,雖然所有參試品種的總?cè)~片數(shù)都在17片以上,但是‘金剛50’、‘Y8’、‘天山1號’3個品種收獲時綠葉數(shù)分別為11,12,12片,綠葉數(shù)量明顯偏少,這不僅影響鮮草產(chǎn)量,而且會影響青貯飼料的適口性。其余12個品種收獲時綠葉數(shù)量基本接近,在13~15片之間。原則上來看,植株綠葉數(shù)偏少的品種不能作為優(yōu)秀青貯玉米品種進行大面積推廣種植。
2.3 不同品種鮮草產(chǎn)量比較
從表2可以看出,15個參試品種的鮮草產(chǎn)量由高到低依次排序為:‘09-7A’>‘沈黃1131’>‘金剛50’>‘中北410(14-2)’>‘青貯2’>‘09-1B’>‘興玉998’>‘龍輻單208’>‘強盛30’>‘晉農(nóng)科1號’>‘YA04889’>‘Y8’>‘龍輻玉6’>‘DF-3’>‘天山1號’。其中,鮮草產(chǎn)量最高的是‘09-7A’,產(chǎn)量為117 076 kg·hm,產(chǎn)量最低的為‘天山1號’,產(chǎn)量為72 234 kg·hm,產(chǎn)量之差為44 842 kg·hm。經(jīng)方差分析可知,‘09-7A’、‘沈 黃1131’、‘金剛50’、‘中北410(14-2)’之間青貯產(chǎn)量差異不顯著,‘天山1號’除與‘YA04889’、‘Y8’、‘DF-3’、‘龍輻玉6’之間差異不顯著外,和其他品種都達到顯著水平,尤其是‘09-7A’、‘沈黃1131’、‘金剛50’、‘中北410(14-2)’與‘DF-3’、‘天山1號’都達到極顯著水平(表4)。這說明參試品種間鮮草產(chǎn)量存在很大差異。
2.4 不同品種間籽粒產(chǎn)量比較
由表3可知,15個參試品種中籽粒產(chǎn)量最高的是‘中北410(14-2)’,產(chǎn)量最低的是‘09-7A’。產(chǎn)量由高到低依次排序為:‘中北410(14-2)’>‘龍輻玉6’>‘強盛30’>‘09-1B’>‘天山1號’>‘青貯2’>‘晉農(nóng)科1號’>‘興玉998’>‘龍輻單208’>‘沈黃1131’>‘DF-3’>‘YA04889’>‘金剛50’>‘Y8’>‘09-7A’。從籽粒產(chǎn)量的比較可以看出,鮮草產(chǎn)量高的品種不一定籽粒產(chǎn)量也高,如‘09-7A’,鮮草產(chǎn)量為117 076 kg·hm,在參試品種中最高,但最終籽粒產(chǎn)量為3 253 kg·hm,在參試品種中最低。‘沈黃1131’鮮草產(chǎn)量為112 669 kg·hm,在參試品種中排名第2位,而籽粒產(chǎn)量為4 813 kg·hm,在15個參試品種中排名第10位。‘中北410(14-2)’鮮草產(chǎn)量為104 498 kg·hm,在15個參試品種中排名第4位,籽粒產(chǎn)量為7 226 kg·hm,在15個參試品種中排名第1位。這說明鮮草產(chǎn)量指標不一定能反映出一個品種的好壞,品種的特性要從鮮草產(chǎn)量水平、病害發(fā)生以及籽粒產(chǎn)量等各個方面綜合考慮和評價。經(jīng)方差分析可知,重復(fù)間差異不顯著,處理間差異顯著。經(jīng)采用新復(fù)極差法(LSR)進行多重比較可知,‘中北410(14-2)’與其他處理間差異都達到顯著水平。‘中北410(14-2)’除與‘龍輻玉6’、‘強盛30’差異極不顯著外,與其他處理間差異都達到極顯著水平(表4)。
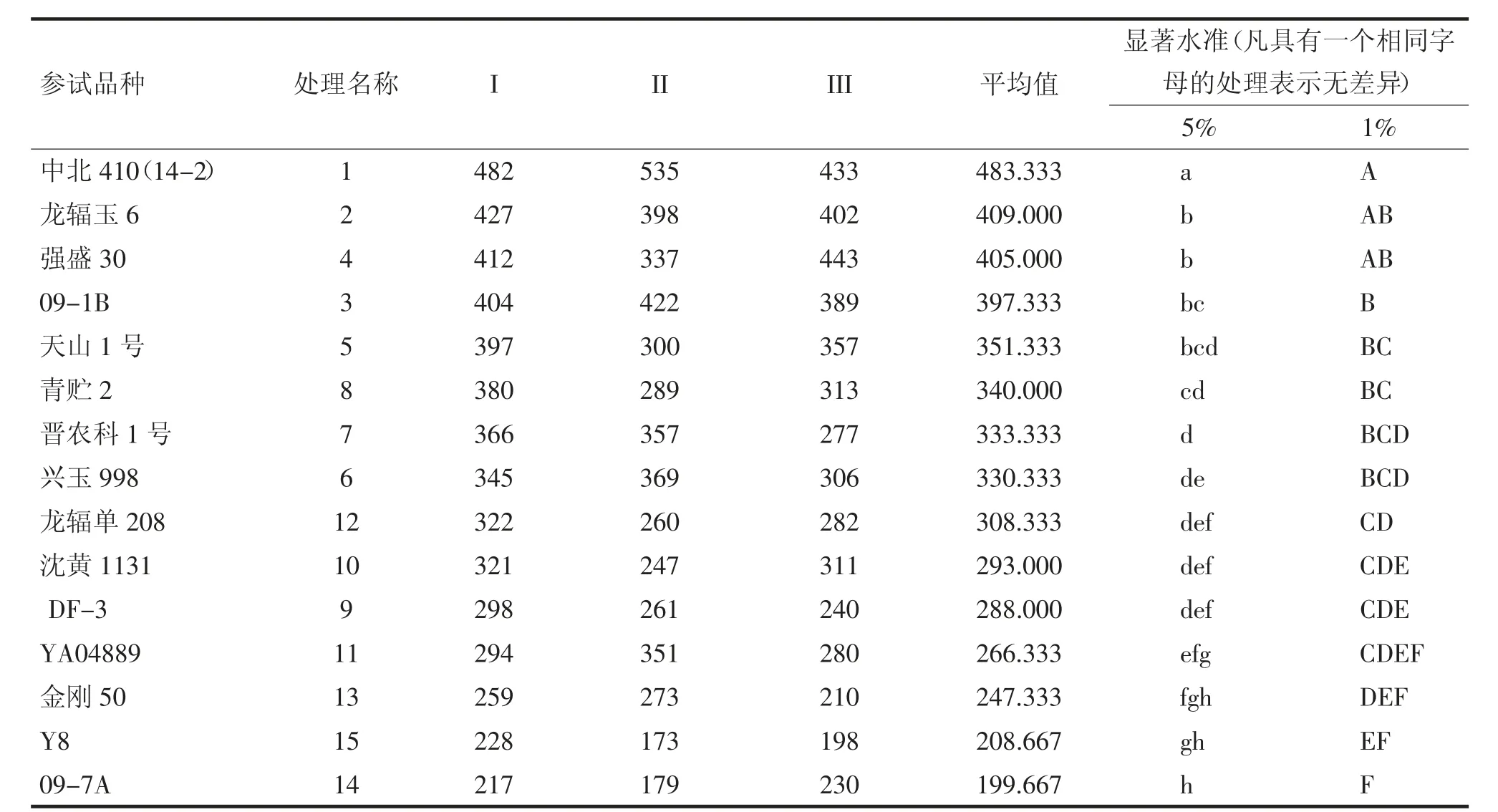
表4 不同參試品種小區(qū)產(chǎn)量方差分析表
3 結(jié)論與討論
根據(jù)本研究對各個參試品種的生育期、生產(chǎn)性狀、鮮草產(chǎn)量水平、病害發(fā)生以及籽粒產(chǎn)量等結(jié)果的綜合分析評價來看,一個青貯玉米品種的優(yōu)劣,不僅要看產(chǎn)量的高低,還要綜合考慮其適應(yīng)性等各方面的指標。通過試驗結(jié)果可以看出,‘天山1號’生長勢比較差,青貯產(chǎn)量明顯低于其他品種,在15個參試品種中最低。‘09-7A’青貯產(chǎn)量雖然最高,但是籽粒產(chǎn)量在15個參試品種中最低,明顯低于其他品種,且生育期較其他品種偏長,不適宜作糧飼兼用型品種進行大面積推廣種植。‘金剛50’鮮草產(chǎn)量在15個參試品種中排名第3位,但是成熟期綠葉數(shù)偏少,作為青貯飼料適口性較差,雖然其他方面指標和參試品種比較屬中上水平,但是不能作為優(yōu)秀青貯玉米品種進行推廣。經(jīng)過綜合比較分析,‘中北410(14-2)’、‘沈黃1131’、‘青貯2’3個品種的生育期、收獲時綠葉數(shù)、鮮草產(chǎn)量等方面綜合性狀較好,符合優(yōu)良青貯玉米品種的要求,且籽粒產(chǎn)量也較高。
由于本研究僅為一年一點的青貯玉米品種引進比較試驗,受天水市秦州區(qū)不同地塊肥力條件和不同區(qū)域海拔高度、溫度、濕度、降雨等因素的影響,其他品種還需要經(jīng)過今后多點多地區(qū)的繼續(xù)試驗,進一步確定其是否具有大面積推廣種植的價值。
猜你喜歡
礦山安全信息(2022年40期)2022-04-07 02:16:52
當(dāng)代水產(chǎn)(2021年10期)2021-12-05 16:31:48
今日農(nóng)業(yè)(2021年14期)2021-11-25 23:57:29
今日農(nóng)業(yè)(2021年13期)2021-08-14 01:37:56
石油與天然氣地質(zhì)(2021年1期)2021-02-22 14:14:44
今日農(nóng)業(yè)(2020年20期)2020-11-26 06:09:10
中國果業(yè)信息(2019年10期)2019-11-13 01:21:34
中國化肥信息(2019年2期)2019-01-18 15:24:35
中國化肥信息(2019年1期)2019-01-17 21:31:12
中國化肥信息(2019年4期)2019-01-17 18:47:06