
海底觀測網海纜低阻抗故障識別及定位方法
2021-01-14 05:30:46馮迎賓劉文竹
海洋技術學報 2020年5期
關鍵詞:故障
馮迎賓,劉文竹,楊 昆,于 洋
(沈陽理工大學 自動化與電氣工程學院,遼寧 沈陽 110059)
海洋約占地球表面積的70%,它對氣候變化、生態循環、地質變遷以及人類活動具有重要作用。為探測和理解海洋的物理、化學、生物和地質等變化過程,海洋科學界提出了繼地面/洋面和空間之后的第三個觀測平臺——海底觀測網[1-2]。與傳統的海洋觀測技術相比,海底觀測網的優點是觀測平臺位于海底以及能源供應和信息傳輸的網絡化,實現了對海洋的長期、連續、實時的觀測。因此,電能穩定、可靠的供給是海底觀測網運行的基礎[3-4]。
海底觀測網采用海底光電復合纜(“海纜”)作為水下電能輸送的載體[5]。海纜布設于海底,船舶拋錨、地殼變動、海洋微生物的腐蝕等都可能造成海纜絕緣層的破壞。海纜故障按照故障性質分為開路故障、高阻抗故障和低阻抗故障3 類。馮迎賓等[6]提出了利用殘壓識別海底觀測網開路故障的方法,但未給出開路故障定位方法。曾祥君等[7]提出了一種基于多端故障行波時差的海底觀測網故障定位方法,通過故障行波矩陣確定故障點位置,但未分析分支單元對行波傳播的影響。海纜低阻抗故障是指海纜斷裂,海纜中的供電導體與海水直接接觸,供電導體會迅速被海水腐蝕,供電時間僅能維持十幾分鐘。為了提高觀測網抗海纜故障的能力,周學軍等和王希晨等[8-9]研究了海底觀測網恒流供電系統方案,但恒流供電系統負載能力較差。Chan Ting 等[10]在假設低阻抗故障發生在某段海纜的條件下,對故障定位方法進行了分析,但未討論故障點的識別算法,因此不具有實用性。李永倩等[11]針對海纜故障檢測困難的問題,采用布里淵光時域反射技術建立了海底電纜實時在線檢測系統。
針對海纜故障識別困難的問題,本文分析了海底觀測網的供電模型、分支單元模型及海纜故障模型,利用穩壓二極管的伏安特性,列出了岸基站與故障點之間的回路方程,求解故障點與岸基站之間的分支單元個數,從而識別發生故障的海纜。在故障識別的基礎上,列出故障點與岸基站之間的回路方程,求解出故障點與分支單元之間的距離,實現故障點的定位。
1 海底觀測網供電網絡
海底觀測網供電系統主要包括岸基站供電設備、海纜、分支單元、接駁盒等。岸基站供電設備向整個觀測網提供電能;海纜是水下電能輸送到接駁盒的載體,本文不考慮連接分支單元與接駁盒之間的海纜;分支單元是主電纜與分支電纜的交叉點,具有電纜故障隔離功能;接駁盒將傳輸的高壓轉換成低壓為科學儀器提供電能并具有故障檢測隔離的功能[12]。
海底觀測網輸電系統的拓撲結構主要類型:樹型拓撲、環狀拓撲、網狀拓撲。由于網狀拓撲結構具有抗故障能力強和負載能力強的優點,本文提出了一種網狀海底觀測網輸電系統拓撲結構。輸電系統拓撲結構如圖1 所示,該結構包括2 個岸基站、11 個分支單元、9 個接駁盒。

圖1 海底觀測網供電拓撲結構
1. 1 分支單元
潘立雪等[13]闡述了分支單元的工作原理和結構,其結構如圖2所示。海纜存在低阻抗故障后,供電系統進入故障識別與定位模式,岸基站輸出的電壓低于接駁盒直流電壓變換器的啟動電壓,海底觀測網中只有主干電纜和低阻抗故障處有電流流過。由分支單元結構可知,分支單元內部含有2 對穩壓二極管。當電流流過穩壓二極管時,穩壓二極管產生電壓降,分支單元內部穩壓二極管產生的電壓降,可用公式(1)表示。

式中:VBU為分支單元兩端電壓降,Vr為穩壓二極管反向導通電壓,Vf為穩壓二極管正向導通電壓。假設分支單元選用的穩壓二極管反向導通電壓為6.2 V,正向導通電壓為0.7 V,則分支單元兩端的電壓降13.8 V。

圖2 分支單元結構
1. 2 海纜故障點
大部分海纜故障是由海纜絕緣皮損壞造成海纜導體與海水直接接觸,導致供電回路短路。由于海水具有良好的導電性能,海纜導體與海水之間的電阻一般較小,因此稱為低阻抗故障。海纜故障模型如圖3 所示,假設位于分支單元a, b之間的海纜出現低阻抗故障,分支單元之間的距離用阻抗Rab表示,故障點f與分支單元a,b之間的距離可用N·Rab,M·Rab表示,其中M和N為比例系數,且M+N=1,故障點的阻抗可用Rf表示。

圖3 海纜故障點
2 海纜故障識別方法
2. 1 海纜區域劃分
由于海底觀測網供電系統采用直流輸電方式,因此可忽略容抗和感抗對供電系統的影響,只考慮海纜電阻對供電系統的影響。海纜的電阻與海纜的長度成正比,比例系數k=1 Ω/km,海纜可用海纜的阻抗R1, R2, R3…R13表示。海底觀測網供電模型如圖1,根據海纜的位置不同將海纜分成兩個區域:位于環形網絡的區域,包括海纜R3, R4,R5…R12;連接岸基站與環形網絡的支路區域,包括海纜R1, R2, R13。
2. 2 穩壓二極管特性分析
穩壓二極管伏安特性曲線如圖4 所示[14],可見其正向特性與普通二極管一樣,在反向擊穿區域內,反向電流在很大范圍內變化時,其反向電壓變化很小,基本上穩定在擊穿電壓附近。由式(1)可知,分支單元的電壓降由所選取的穩壓二極管決定,因此分支單元的電壓降在適當的電流變化范圍內電壓降不變。在故障識別與定位模式下,可調節岸基站輸出的電壓,使分支單元的電壓降保持不變,此時,岸基站輸出的電流只受海纜電阻的影響。
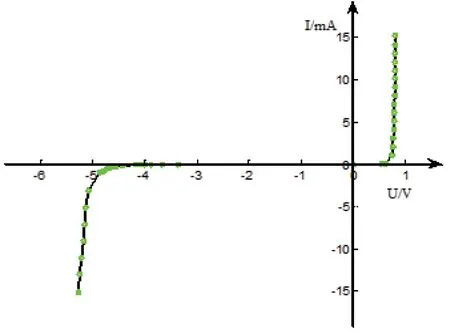
圖4 穩壓二極管伏安特性曲線
2. 3 故障海纜識別算法
假設如圖1 的海底觀測網出現低阻抗故障,供電系統進入故障識別與定位模式,僅利用岸基站1 就可實現故障海纜的識別。假設岸基站1 與故障點f 之間的阻抗為R,岸基站1 到故障點f 之間有n 個分支單元,因此,根據岸基站輸出的電壓U、電流值I 可寫出如下方程:

式中:兩個未知數n, R,可以調整岸基站輸出電壓,測得不同電壓下的電流值,列出二元一次方程組求解兩個未知數,方程組如式(3)。

式中:U1, U2為岸基站1 輸出電壓;I1, I2為岸基站1 輸出電流。解方程組可得:
根據海底觀測網供電模型,當n=0 時,故障海纜為R1;當n=1 時,故障海纜為R2;當n>2 時,故障海纜位于環網,不能識別出發生故障的海纜。
如果故障海纜位于環網,節點分支單元10 的節點電壓UBU10可表示為,

假設位于環網的海纜R5出現故障,根據拓撲結構,岸基站1 的輸出電流可以通過兩條路徑到達故障點。假設兩路徑的阻抗為Rl1, Rl2,兩路徑所經過的分支單元個數分別為i, j。對節點分支單元10 可寫出基爾霍夫電流方程:

式中:I 為岸基站的輸出電流。對式(5)進行簡化處理可得:

假設:
式(6)可簡化成如下形式:

式中:UBU10可通過式(4)求得,I 為岸基站輸出電流,可直接測量獲得;a, b 為未知量。為提高計算精度,調節岸基站輸出電壓,獲取多組數據求出變量a, b。假設調節岸基站輸出電壓4 次,岸基站輸出電流矩陣,分支單元10 的電壓矩陣:
將式(9)寫成矩陣的形式:

由于海底觀測網的拓撲結構和每段海纜的長度和阻抗已知,因此可得如下方程:

式中:RL為環網海纜的總阻抗;NBU為環網的分支單元總個數。
式(7 ~8)及式(12 ~13)構成方程組,可求出變量Rl1, Rl2, i, j。根據i, j 的值可得到存在故障的海纜。
3 故障定位算法
海纜位于海底,修復費用昂貴,維修周期長。海纜出現故障后,準確給出故障位置是提高海纜維修效率的關鍵。假設海纜R5存在低阻抗故障,利用本文2.3 節的中識別方法已經識別出發生故障的海纜。在故障定位模式下,由于供電系統輸出的電壓小于接駁盒電源轉換系統的啟動電壓,接駁盒的負載沒有啟動。因此,觀測網供電系統中只有故障點f 有漏電流,故障點漏電流If可表示為:

式中:IV1, IV2為岸基站1, 2 電源輸出電流。
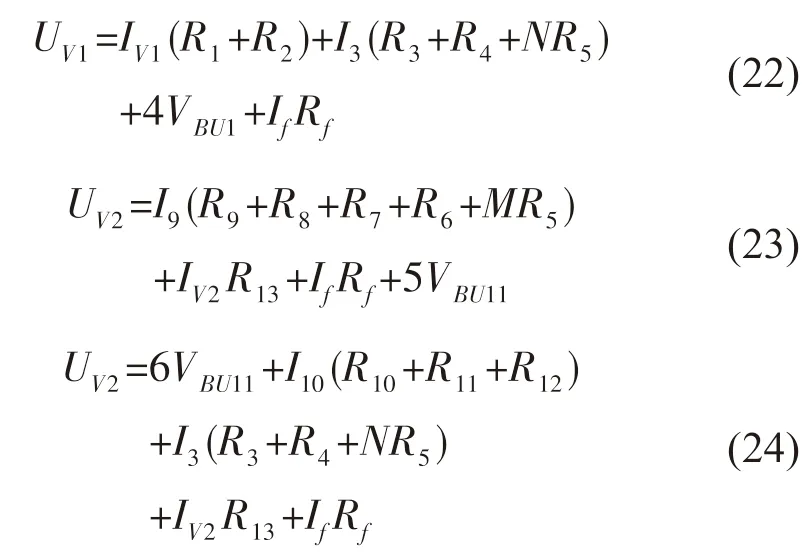
根據供電系統的拓撲結構可知,岸基站1, 2與故障點f 構成供電回路。采用支路電流法,可寫出3 個獨立方程。

式中:UV1、UV2為岸基站電源輸出電壓;Ii(i=1,2, 3…12)為各段海纜的電流;VBUi(i=1, 2, 3…11)為分支單元電壓降,分支單元電壓降相等。
根據海底觀測網拓撲結構和基爾霍夫電流定律可知,

將式(18 ~21)代入式(15 ~17)可得:
節點BU11 可寫出基爾霍夫電流方程:

由海纜故障模型可知:

式(14)及式(22 ~26)構成方程組,可求出未知量N, M, Rf, I3, I9, I10,從而實現對海纜故障點f 的定位。故障點f 與分支單元3 的距離L=NR5/k。
4 仿真實驗
為驗證算法的有效性,利用Simulink 電力系統工具箱SPS 模塊建立了拓撲結構圖1 的供電模型,仿真參數設置如下:岸基站電源電壓1 和2 輸出電壓可調,輸出電流可測,每段海纜的長度90 ~200 km 不等。假設電壓、電流傳感器測量誤差服從均值為0、方差為0.1%的正態分布。
假設海纜R1,R2,R4,R5,R12分別出現低阻抗故障,根據式(3)計算n的值如表1。從表1 可以看出,根據n的值可以識別出低阻抗故障電纜R1,R2,故障海纜R4,R5, R12位于環網中,但不能直接識別出故障電纜。為了具體識別出環網中的哪支電纜出現故障,需做進一步的仿真分析,利用式(7 ~8)及式(12 ~13)計算出i,j的值,如表2 所示,可以根據i,j的值識別出現故障的海纜。

表1 不同區間的海纜故障求出的n 值

表2 不同區間的海纜故障求出的i,j 值
為驗證故障識別算法不受故障點位置的影響,假設海纜R2出現低阻抗故障,故障點f與節點BU1 之間的距離在0 ~100 km 之間變化,每隔10 km 做一次仿真實驗,故障點的阻抗為5 Ω,根據式(3)計算n,計算結果如圖5 所示。從圖中可以看出,可以通過n值識別出故障海纜R2,并且所求得n值與海纜故障點的位置無關。

圖5 不同故障位置情況下的n 值
為驗證故障識別算法不受故障點阻抗的影響,假設海纜R2故障點f與節點BU1 之間的距離為50 km,故障點f與海水之間的阻抗在0 ~10 Ω 之間變化,每隔1 Ω 做一次仿真實驗,根據式(3)計算n的值,計算結果如圖6 所示。從圖中可以看出,可利用n識別出故障海纜,不受故障點與海水之間阻抗的影響。
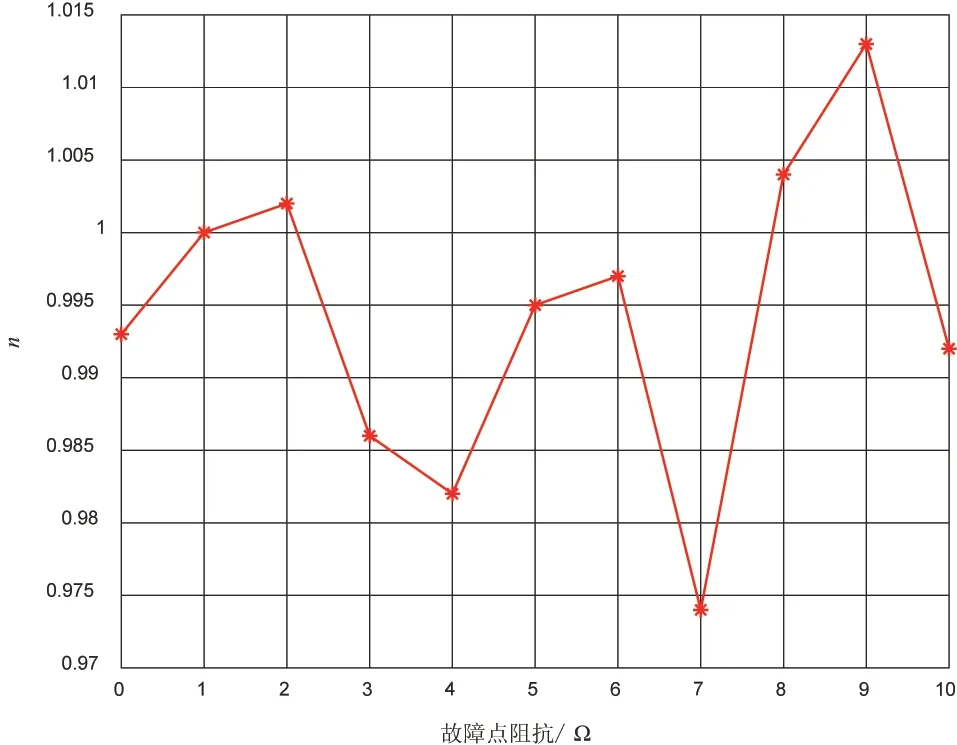
圖6 不同故障點阻抗下的n
為驗證故障定位算法,假設發生故障的海纜為R2,R4,R5,R6,R11。在故障海纜識別的基礎上,利用式(14)及式(22 ~26)可計算出故障點位置及故障點阻抗,仿真結果見表3。從表3 可以看出,本文提出的海纜故障點定位方法在不同故障海纜的情況下實現了對故障點的定位,并且故障定位誤差均在1 km 以內,同時給出了故障點阻抗。
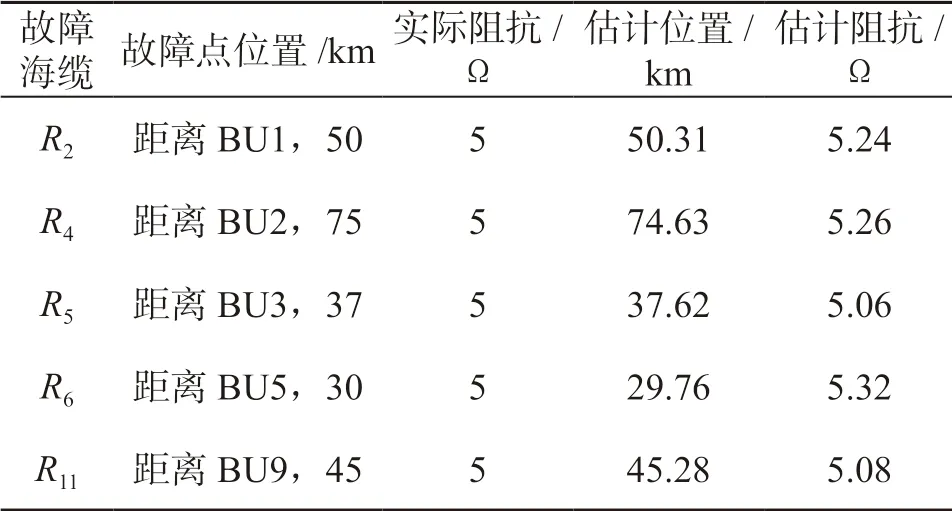
表3 故障海纜定位結果
為驗證故障定位誤差是否受故障點阻抗的影響,假設發生故障的海纜為R5,故障點與節點BU3 之間的距離為130 km,故障點f與海水之間的阻抗為0 ~10 Ω 不等,每隔1 Ω 做一次仿真實驗。根據故障定位算法求出故障點位置,計算結果如圖7 所示。從圖中可以看出,本文所提出的故障定位方法不受故障點與海水之間阻抗的影響,故障定位誤差均在1 km 以內。
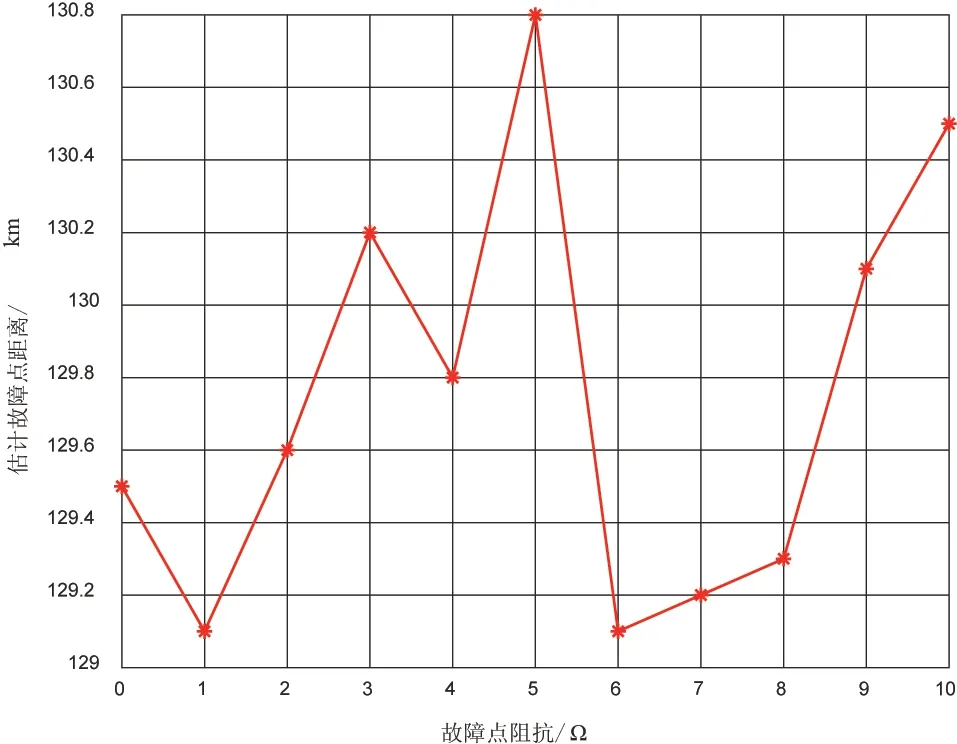
圖7 不同故障點阻抗情況下的故障定位結果
5 結 論
本文在分析海底觀測網絡系統的供電模型、分支單元模型和故障電纜模型的基礎上,提出了低阻抗海纜故障識別算法與定位算法。搭建了供電系統仿真模型,開展了仿真試驗。試驗結果表明:故障識別算法可精確識別發生故障的海纜,并且不受故障點阻抗和位置的影響;故障定位算法可計算出故障點位置,定位誤差在1 km 以內,并且不受故障點阻抗的影響。在仿真試驗的基礎上,下一步搭建半物理仿真平臺,驗證本文算法在半物理平臺的有效性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
