
基于超高精度激光追蹤原理的海水潮位計量檢測技術的研究
2021-01-14 05:30:58朱麗萍于小焱
海洋技術學報 2020年5期
朱麗萍,胡 波,于小焱
(國家海洋標準計量中心,天津 300112)
氣候變暖和海平面上升會對人類社會造成嚴重影響。近年來,世界范圍內各國政府、社會團體和科學界關注著海平面上升及其對海岸帶造成的影響。1989 年,美國科學院院長Frank Press 指出:“海岸帶管理應當考慮將來海平面上升”[1]。目前,據政府間氣候變化委員會(Intergovernmental Panel on Climate Change,IPCC)提供的數據顯示,未來100 年,全球海平面上升率的最佳估計值分別為:1990—2030 年,4.5 mm/a;2031—2070 年,6.5 mm/a。國家測繪總局對過去數十年來的數據估計顯示,我國海平面平均上升率約為1.4 mm/a,各地相對海平面差別很大[2]。
潮汐是重要的海洋物理要素之一,海平面上升直接關系著潮汐觀測數據[3]。驗潮儀(水位計)則主要用于海洋、河流和湖泊湖位(水位)的測量,根據測量原理的不同,可分為浮子式、壓力式和聲學式3 種[4]。為了提高我國海洋潮位觀測水平,需要開展驗潮儀(水位計)的計量檢測技術研究,研制符合要求的計量標準器和裝置。海洋潮位計量標準設備是我國海洋潮位量值的傳遞源頭,其技術指標的大小直接影響我國海洋潮位數據的準確性,對海洋預報、工程建設等涉海業務的科學發展帶來嚴重影響,且具有重要意義。
經實地調研,國外驗潮儀(浮子式)多采用固定水尺法,通過對比試驗對潮位儀進行校準。我國驗潮儀則主要在實驗室內,通過驗潮儀檢定裝置進行標定。裝置主要由檢定水塔、貯水池、電荷耦合器件(Charge Couple Device,CCD)攝像頭、因瓦標準尺、控制系統等組成。因瓦標準尺作為主標準器,通過CCD 攝像頭讀取當前水位對應因瓦標準尺刻度作為水位標準值。目前,我國已建驗潮儀檢定裝置共4 家單位,包括國家海洋標準計量中心和3 個分站(北海標準計量中心、東海標準計量中心和南海標準計量中心),4 家單位檢定裝置的主標準器及檢定裝置的技術指標一致。國家海洋標準計量中心于1996 年獲得授權并開展相關計量檢定業務,3 個分站目前還未獲得授權,未開展相關業務。
受多個因素的影響,驗潮儀檢定裝置在技術指標和硬件配置等方面存在一定的不足。研制一種精度高、測量結果不受外界環境影響的技術/檢測裝置是當前的迫切需求。基于上述要求,激光追蹤測距技術的高精度、斷光路再續、自動追蹤等特點能夠滿足上述要求。因此,本文提出一種基于超高精度激光追蹤技術的潮位儀檢測新裝置。利用該檢測裝置能夠極大地消除環境、設備和實驗人員帶來的影響,并將技術指標由U=2 mm,k=2[5](U 為擴展不確定度,k 為包含因子)提高至U=0.86 mm,k=2,以更好地滿足未來驗潮儀(水位計)檢測技術的發展需求。
1 驗潮計量檢測技術
目前,實驗室所使用的驗潮儀檢定裝置由國家海洋標準計量中心研制,1996 年通過國家計量標準考核,成為社會公用計量標準。該驗潮裝置廣泛地服務于各涉海部門和機構,為新制造和使用中的浮子式驗潮儀(水位計)、壓力式驗潮儀(水位計)和聲學式驗潮儀(水位計)提供檢定和校準服務。
1. 1 驗潮儀檢定裝置簡介
驗潮儀檢定裝置由高9 m、直徑1 m 的檢定水塔、室外貯水池、CCD 攝像頭、因瓦標準尺、控制系統等組成,驗潮儀檢定裝置構成示意圖(圖1)。

圖1 驗潮儀檢定裝置構成示意圖
檢定過程中,通過控制系統對電動執行器及水泵進行控制,使水塔內復現0 ~8 000 mm 水位差。進水泵將水從室外貯水池壓入水塔內,在水塔底部連接透明軟管,利用連通器原理,透明軟管內水位與水塔內水位始終保持一致,在透明軟管旁邊垂直放置一個帶有刻度的因瓦標準尺。實驗人員通過CCD 攝像頭讀取與透明軟管內水位對應的因瓦標準尺刻度作為標準水位值,同時讀取被檢浮子式驗潮儀(水位計)測得值,經數據處理,兩者進行比較,從而實現對浮子式驗潮儀(水位計)的整機檢定[6]。
1. 2 驗潮儀裝置優缺點
當前所使用驗潮儀檢定裝置的優點是能夠通過CCD 攝像頭直觀地讀取/觀測標準水位值,便于對被檢儀器進行檢定,但也存在一定的不足影響數據質量。
(1)技術指標方面的不足。驗潮儀檢定裝置的技術指標(示值誤差評定的不確定度結果)為:高度測量范圍0 ~8 000 mm,擴展不確定度U=2 mm,k=2。根據標準《浮子式驗潮儀》(JJG 587-2016),浮子式驗潮儀檢定結果準確度等級符合1 級時,最大允許誤差(Maximum Permissible Errors,MPE)為±3 mm。上述兩個結果不能嚴格遵守《測量儀器特性評定》(JJF 1094-2002)中“示值誤差評定的測量不確定度對符合性評定的影響可忽略不計的要求:U ≤1/3MPE”的要求。因此如果嚴格遵守《測量儀器特性評定》(JJF 1094-2002)的規定,就必須提高驗潮儀檢定裝置的技術指標即示值誤差評定的不確定度結果。在被測儀器重復性不改變的情況下,需要通過提高標準器的技術指標即減小標準器帶來的不確定度分量,達到提高驗潮儀檢定裝置技術指標的目的。
(2)驗潮儀標準水位值讀取受外界光線強度影響大。通過CCD 攝像頭讀取標準水位值時,需要借助室外光線,但光線太強或太弱均會導致成像效果模糊不清,影響讀取效果,即中午光線最強或傍晚光線最弱時影響較大。
(3)透明軟管影響讀數效果。軟管內水質為與外界大氣相通的自來水,軟管內壁易滋生微生物,導致透明度下降,影響攝像頭中的成像效果。為保證透明度,只能頻繁更換水質和軟管,不能解決根本問題。
(4)主標準器易生銹,更換成本高。主標準器因瓦標準尺是銦鋼材質,長期暴露于潮濕環境易生銹,影響讀取數據的清晰度。3 個分站地處近海,主標準器生銹情況更為嚴重。更換主標準器定制工期長、費用高。
2 基于激光追蹤技術的驗潮計量檢測技術
2. 1 激光追蹤技術簡介
激光跟蹤測量技術是一種集合激光干涉測距技術、光電探測技術、精密機械技術、計算機及控制技術等各種先進技術的高精度、大尺寸、球坐標測量技術,具有測量范圍廣、精度高、實時快速等優點[7-8]。表1 為美國自動精密工程公司(Automated Precision Inc.,API)第四代激光追蹤儀技術指標。
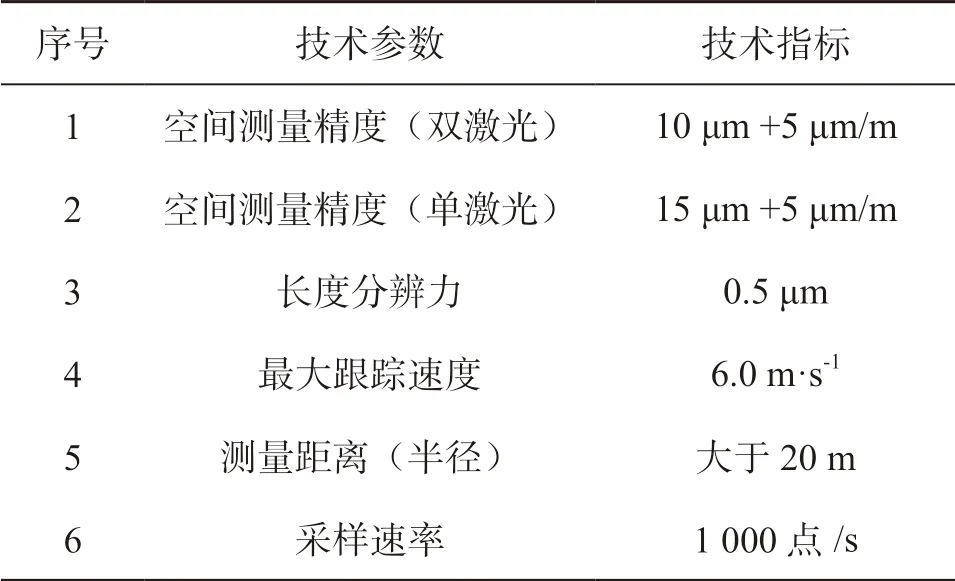
表1 美國API 公司第四代激光追蹤儀主要技術指標
由表1 可見,激光追蹤儀各項技術指標較高,其中長度分辨率達到0.5 μm,是因瓦標準尺分辨率1 mm 的2×103倍,最大追蹤速度和采樣速率也能更好地實現遠程精準測量。
2. 2 激光追蹤技術原理
激光追蹤技術是通過靶鏡反射、跟蹤反射激光束,實現對空間運動目標的跟蹤測量。激光追蹤技術測量原理見圖2。
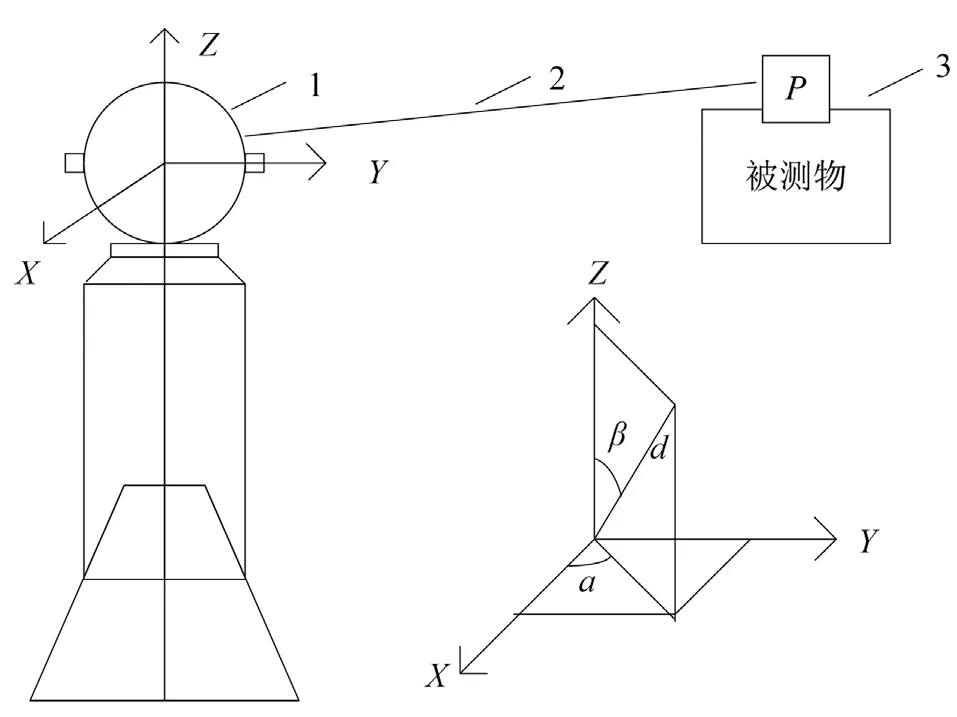
圖2 激光追蹤技術測量原理
激光跟蹤儀1 投射激光束2 至靶鏡3,靶鏡3將其光束按原路反射回跟蹤儀。激光追蹤儀通過激光干涉儀及2 個角度編碼器測得被測目標的空間距離、水平角和垂直角,然后按球坐標測量原理得到空間點的三維坐標x,y,z[9]。因此,只要靶鏡接觸或沿著被測目標移動即可獲得被測目標的空間坐標。被測目標的空間坐標由公式(1)~(3)給出[10-11]:
式中:d為被測目標的空間距離;α,β為被測目標水平方位角和垂直方位角。
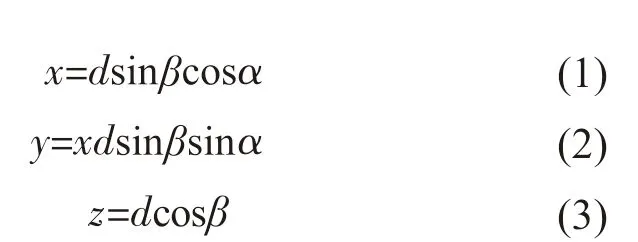
2. 3 基于激光追蹤技術的驗潮計量檢測裝置
激光追蹤技術具有高精度、斷光再續、自動追蹤等特點,基于上述特點將激光追蹤儀作為驗潮儀檢定裝置的主要計量標準器,經理論分析與實驗驗證能夠實現對浮子式驗潮儀(水位計)的計量檢定。基于激光追蹤原理的潮位檢測新裝置構成示意圖見圖3。
圖3 基于激光追蹤原理的潮位檢測新裝置構成示意圖
在水塔底部連接一個不銹鋼管,與水塔組成連通器。不銹鋼管直徑不少于20 cm,用于放置固定靶鏡的浮體。通過控制系統對電動執行器及水泵進行控制,使水塔內復現0 ~8 000 mm 水位差。進水泵將水從貯水池壓入水塔內,水面穩定后,激光追蹤儀測算當前水位值作為標準水位值,讀取被檢浮子式驗潮儀(水位計)水位值,實現整機檢定。
每1 000 mm 作為一個檢定點,第一個檢定點為200 mm 附近。當水面緩慢上升至檢定點,穩定2 min,激光追蹤儀測量靶鏡空間坐標并計算得到水位值,再移動靶鏡位置2 次。取3 次靶鏡不同位置測算的平均值作為當前水位標準值;同時讀取一次浮子式驗潮儀的測量值作為儀器示值(被測值)。打開水閥及進水泵,水位上升至1 200 mm 點附近,依照上述方法,直至完成0 ~8 000 mm 水位上升過程和下降過程的檢測。為減小測量誤差,每次移動靶鏡位置,至少穩定2 min 再測量。
3 基于激光追蹤原理的驗潮儀計量檢定裝置不確定度評定
3. 1 測量模型

式中:Δh為 被檢驗潮儀(水位計)的水位示值誤差;hx為被檢驗潮儀(水位計)的水位示值;hs為 驗潮儀檢定裝置的標準水位值。由于hx和hs互不相關,則:

3. 2 分量計算
基于激光追蹤技術的驗潮儀檢測新裝置誤差來源:一是被檢儀器測量重復性引入,二是計量標準設備引入。計量標準設備引入誤差主要是激光追蹤儀測量不確定度帶來的。
3. 2. 1 被檢驗潮儀(水位計) 測量重復性引入的標準不確定度分量u(hx)以浮子式驗潮儀(水位計)SCA11-3A 為例。潮位升高至4 000 mm 校準點,標準水位值達到穩定后,讀取被校驗潮儀(水位計)示值10 次,利用貝塞爾公式獲得實驗標準差,具體數據見表2。
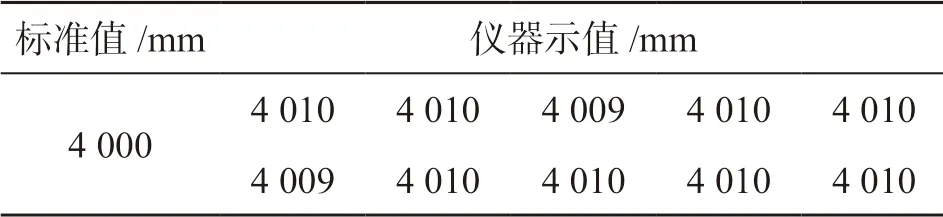
表2 浮子式驗潮儀重復性測量數據
水位測量重復性:

根據貝塞爾公式,計算測量重復性引入的標準不確定度為u(hx)=0.42 mm。
當被校儀器重復性引入的不確度分量大于其分辨力引入的不確定分量時,應該用重復性引入的不確定分量代替分辨力分量,即二者取其較大者。被檢的儀器帶數字顯示裝置,分辨力為1 mm,其分辨力引入的標準不確定度分量為0.29 mm,小于0.42 mm,所以取重復性引入的不確度分量0.42 mm。
3. 2. 2 計量標準設備引入的標準不確定度分量u(hs)以測量半徑為80 m、單聚光動態測量的激光追蹤儀作為主標準器,根據中國計量科學研究院提供的校準證書顯示最大允許誤差為15 μm +5 μm/m,當取長度為10 m 時,標準不確定度分量為

3. 3 合成不確定度

取包含因子k=2,則擴展不確定度為

綜上,以超高精度的激光追蹤儀作為主標準器,驗潮儀檢測新裝置的擴展不確定度U=0.86 mm,k=2 滿足《測量儀器特性評定》(JJF 1094-2002)對計量標準裝置U≤1/3 MPE 的要求,能夠對高精度浮子式驗潮儀(水位計)量值溯源提供更加可靠的保障。
3. 4 兩種測量原理的試驗數據分析
2018 年4 月和2019 年8 月實驗室分別利用當前檢定裝置(因瓦標準尺作為主標準器)和新檢測裝置(激光追蹤儀作為主標準器)對0 ~8 000 mm水位范圍進行現場試驗,得到水位上升過程的對比結果。2018 年對比結果見表3,2019 年對比結果見表4。表中HY為實驗人員讀取當前檢定裝置水位的平均值,HJ為新檢測裝置測算水位的平均值。圖4為兩次對比數據差值絕對值隨水位值的變化情況。
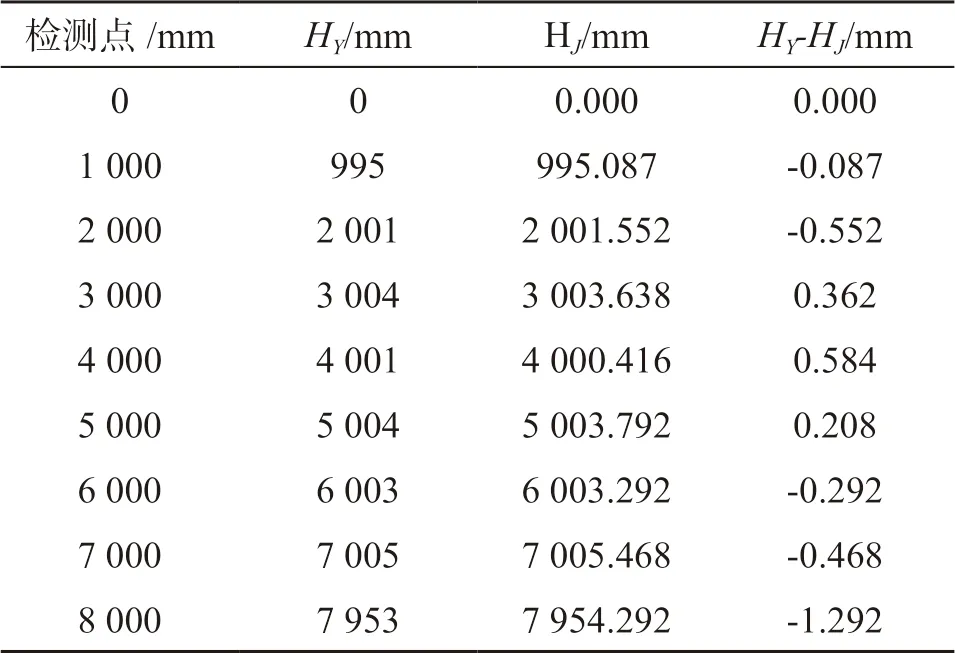
表3 2018 年試驗兩套裝置測得值對比結果

表4 2019 年試驗兩套裝置測得值對比結果
表3 和表4 試驗數據顯示,隨著水位的升高,除8 000 mm 檢測點外,其他檢測點兩者差值均小于1 mm,說明兩種原理的測量結果均能較好地顯示當前的水位值。從顯示分辨力方面看,新檢測裝置顯示分辨力更高。當前檢定裝置的最小分辨力為1 mm,水位數據只能精確至整毫米;新檢測裝置最小分辨力為0.5 μm,經測算后,水位數據可精確至整微米,后者分辨力是前者103倍。結合技術指標方面看,前者擴展不確定度U=2 mm,k=2,后者擴展不確定度U=0.86 mm,k=2,后者測量精度是前者測量精度的2 倍多。綜上,新檢測裝置測算的數據能更加精確地反映當前的水位值。
圖4 是兩種計量標準器數據差值絕對值隨水位的變化情況。在0 ~8 000 mm 水位范圍,差值絕對值分別為0.087 ~1.292 mm 和0.153 ~1.834 mm,對比曲線基本一致。在0 ~6 000 mm 水位范圍內,差值絕對值均小于1 mm,8 000 mm 水位點差值絕對值相對較大,分別為1.292 mm 和1.883 mm,經分析主要原因是兩次試驗進行至8 000 mm 水位點時,接近正午時分,陽光較強,實驗人員讀取因瓦標準尺刻度值時,刻度圖像模糊,影響讀數效果,也再次驗證當前裝置讀數質量受外界影響較大;新檢測裝置測量時,受水面穩定度的影響也要考慮,但基于實驗過程中,水位上升過程緩慢,每次讀數之前水面穩定時間至少達到2 min,所以可認為水面穩定度對該點誤差的影響非常小,可忽略。
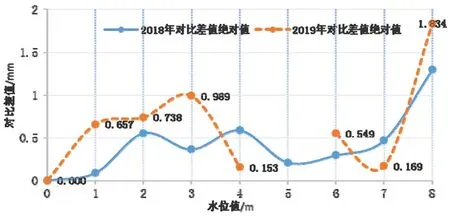
圖4 差值絕對值隨水位值變化圖
4 結 論
驗潮儀檢定裝置的指標直接影響著潮位儀(水位計)的量值溯源結果。本文指出了當前檢定裝置在技術指標和硬件方面的不足。針對需求,創造性地提出了一種以激光追蹤技術為主,結合當前檢測裝置配置的潮位計量檢測新裝置。相比當前裝置的技術指標U=2 mm,k=2,新檢測裝置指標可提高至U=0.86 mm,k=2,是前者的2 倍多,能夠更好地滿足《測量儀器特性評定》(JJF 1094-2002)對計量標準裝置的要求。
通過對比2018 年和2019 年兩次現場試驗對比結果顯示,相比當前的檢定裝置,新檢測裝置能夠更加精確地測算水塔內的水位值,且測算結果不受外界環境和人為因素的影響;水面穩定度的影響非常小,可忽略。所以,基于超高精度激光追蹤原理的海水潮位計量檢測技術能夠提高技術指標,彌補硬件不足,更好地滿足未來高精度驗潮儀(水位計)量值溯源需求,對提升計量檢測標準技術水平,提升我國海洋潮位監測數據的準確可靠性,具有重要意義。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
