參數(shù)優(yōu)化變分模態(tài)分解與多域流形學(xué)習(xí)的行星齒輪箱故障診斷
2021-01-18 03:01:44王振亞姚立綱戚曉利鄭近德
振動(dòng)與沖擊 2021年1期
王振亞, 姚立綱, 戚曉利, 張 俊, 鄭近德
(1. 福州大學(xué) 機(jī)械工程及自動(dòng)化學(xué)院, 福州 350116; 2. 安徽工業(yè)大學(xué) 機(jī)械工程學(xué)院, 馬鞍山 243032)
行星齒輪箱作為旋轉(zhuǎn)機(jī)械的關(guān)鍵部件,在直升機(jī)主減速器、風(fēng)力發(fā)電機(jī)組等復(fù)雜傳動(dòng)系統(tǒng)都有著較廣泛的應(yīng)用[1]。但在實(shí)際運(yùn)行過程中,由于行星齒輪箱振動(dòng)信號(hào)易受噪聲污染與振動(dòng)復(fù)雜等影響,增加了對(duì)其進(jìn)行故障診斷的難度[2]。
目前,常見的故障信號(hào)降噪方法主要包括:小波變換,經(jīng)驗(yàn)?zāi)B(tài)分解(Empirical Mode Decomposition,EMD)和局部均值分解等。如徐金梧等[3]利用小波變換提取出被噪聲所掩蓋滾動(dòng)軸承故障沖擊成分;楊宇等[4]將EMD應(yīng)用于故障信號(hào)預(yù)處理過程;程軍圣等[5]提出一種基于局部均值分解與能量譜相結(jié)合的齒輪故障診斷方法,并均取得良好實(shí)驗(yàn)效果。然而小波變換事先需要選擇小波基和分解層數(shù)等,缺乏自適應(yīng)性;EMD存在頻率混淆、過包絡(luò)、欠包絡(luò)、端點(diǎn)效應(yīng)等局限[6];局部均值分解具有運(yùn)算速度慢、信號(hào)沖突問題等缺陷[7]。變分模態(tài)分解(Variational Mode Decomposition, VMD)[8]是在傳統(tǒng)維納濾波基礎(chǔ)上,研發(fā)的一種非遞歸自適應(yīng)信號(hào)分解新方法,與小波變換、EMD和局部均值分解等方法相比,VMD分解的信號(hào),具有精度高、收斂快和魯棒性好等特點(diǎn),非常適用于處理行星齒輪箱故障信號(hào)。但VMD算法信號(hào)處理效果與懲罰因子和分解個(gè)數(shù)這兩個(gè)參數(shù)密切相關(guān),為了能夠有效從噪聲干擾下提取行星齒輪箱故障信號(hào)分量,實(shí)現(xiàn)最佳信號(hào)處理效果,本文將尋優(yōu)能力強(qiáng)的新型元啟發(fā)式算法——樽海鞘群算法(Salp Swarm Algorithm, SSA)[9]應(yīng)用于VMD的參數(shù)尋優(yōu)過程,提出了樽海鞘群優(yōu)化變分模態(tài)分解(Salp Swarm Optimization Variational Mode Decomposition, SSO-VMD),并將其應(yīng)用于行星齒輪箱信號(hào)預(yù)處理過程。
行星齒輪箱故障診斷的關(guān)鍵在于特征提取,為全面表征故障信息,從時(shí)域、頻域和尺度域提取特征參數(shù),構(gòu)造成原始多域故障特征集。由于該故障集具有非線性、高維、冗余等特性,直接輸入至分類器中進(jìn)行模式識(shí)別,可能影響識(shí)別效果。流形學(xué)習(xí)能夠有效挖掘出非線性數(shù)據(jù)集嵌入在高維空間中的低維流形成分,為實(shí)現(xiàn)高維故障特征集維數(shù)約簡(jiǎn)提供更為理想的解決途徑。經(jīng)典的流形學(xué)習(xí)算法主要包括:等度規(guī)映射(Isometric Mapping, Isomap)[10]、局部切空間排列[11]、界標(biāo)點(diǎn)等度規(guī)映射(Landmark Isomap, L-Isomap)[12]、t-分布鄰域嵌入(t-Distributed Stochastic Neighbor Embedding, t-SNE)[13]等算法。但上述方法均為無監(jiān)督降維方法,降維過程沒有利用樣本標(biāo)簽信息,不太適合存在諸多奇異數(shù)據(jù)點(diǎn)的行星齒輪箱特征降維過程[14]。因此,本文引入一種改進(jìn)監(jiān)督型自組織增量學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)界標(biāo)點(diǎn)等度規(guī)映射(Improved Supervised Self-organized Incremental Learning Neural Network Landmark Isomap, ISSL-Isomap)[15]流形學(xué)習(xí)新算法,將其應(yīng)用于多域故障特征集維數(shù)約簡(jiǎn)過程,以獲取低維、敏感的故障特征向量。
行星齒輪箱故障診斷的本質(zhì)在于模式識(shí)別,利用新型機(jī)器學(xué)習(xí)算法——人工蜂群優(yōu)化支持向量機(jī)(Artificial Bee Colony Support Vector Machine, ABC- SVM)[16]對(duì)“SSO-VMD+多域故障特征+ISSL-Isomap流形學(xué)習(xí)”低維特征進(jìn)行診斷識(shí)別。行星齒輪箱故障診斷實(shí)驗(yàn)分析結(jié)果表明所提方法能夠精準(zhǔn)、有效識(shí)別出各故障類型。
1 參數(shù)優(yōu)化變分模態(tài)分解
1.1 變分模態(tài)分解算法
VMD是一種新的自適應(yīng)信號(hào)分解方法,該方法通過循環(huán)迭代來搜尋變分模型的最優(yōu)解,確定本征模態(tài)分量(Intrinsic Mode Functions, IMF)的頻率中心及帶寬,實(shí)現(xiàn)各分量的有效分離。VMD算法的約束變分模型如下
(1)
式中:K表示IMF分量總數(shù);{uk}={u1,u2,…,uK}與{ωk}={ω1,ω2,…,ωK}分別表示K個(gè)IMF分量及其對(duì)應(yīng)的中心頻率
將二次懲罰因子α和拉格朗日乘法算子λ(t)引入上式,得到增廣拉格朗日函數(shù)

(2)
(3)
唐貴基等詳細(xì)給出了VMD完整算法,并驗(yàn)證該算法優(yōu)于現(xiàn)有的模態(tài)分解模型。但VMD性能易受懲罰因子α和IMF分量個(gè)數(shù)K的影響:當(dāng)懲罰因子α選取不當(dāng)時(shí),VMD將無法獲得最佳帶寬的IMF分量;當(dāng)分量個(gè)數(shù)K設(shè)置不合理時(shí),則會(huì)出現(xiàn)過分解或欠分解現(xiàn)象。因此,選取合適的受懲罰因子α和IMF分量個(gè)數(shù)K成為目前需要解決的關(guān)鍵問題。
1.2 樽海鞘群優(yōu)化變分模態(tài)分解算法
樽海鞘群算法利用“鏈”結(jié)構(gòu)模式有效避免傳統(tǒng)“群”結(jié)構(gòu)模式(如粒子群,蟻群,灰狼群等)中因領(lǐng)導(dǎo)者前期搜索不充分而陷入局部極值情況的發(fā)生,并且該算法能夠有效尋找全局最優(yōu)解。因此,本文采用樽海鞘群算法對(duì)VMD參數(shù)進(jìn)行優(yōu)化選取,其中如何確定合適的適應(yīng)度函數(shù)成為優(yōu)化過程的要點(diǎn)。對(duì)于VMD分解后的IMF分量,若該分量包含較多的故障特征信息,其波形會(huì)出現(xiàn)規(guī)律性脈沖,同時(shí)呈現(xiàn)出較強(qiáng)的稀疏特性,因此包絡(luò)熵值較小;反之,若該分量包含較多噪聲信息,其波形的規(guī)律性脈沖不明顯,信號(hào)的稀疏特性較弱,故包絡(luò)熵值較大。本文將樽海鞘所處空間位置(對(duì)應(yīng)參數(shù)α和K)下,利用VMD分解后全部IMF分量的包絡(luò)熵均值定義為適應(yīng)度值,并以最小包絡(luò)均熵為尋優(yōu)目標(biāo),實(shí)現(xiàn)VMD的參數(shù)尋優(yōu)過程。
樽海鞘群優(yōu)化變分模態(tài)分解(SSO-VMD)流程如圖1所示,具體步驟如下。
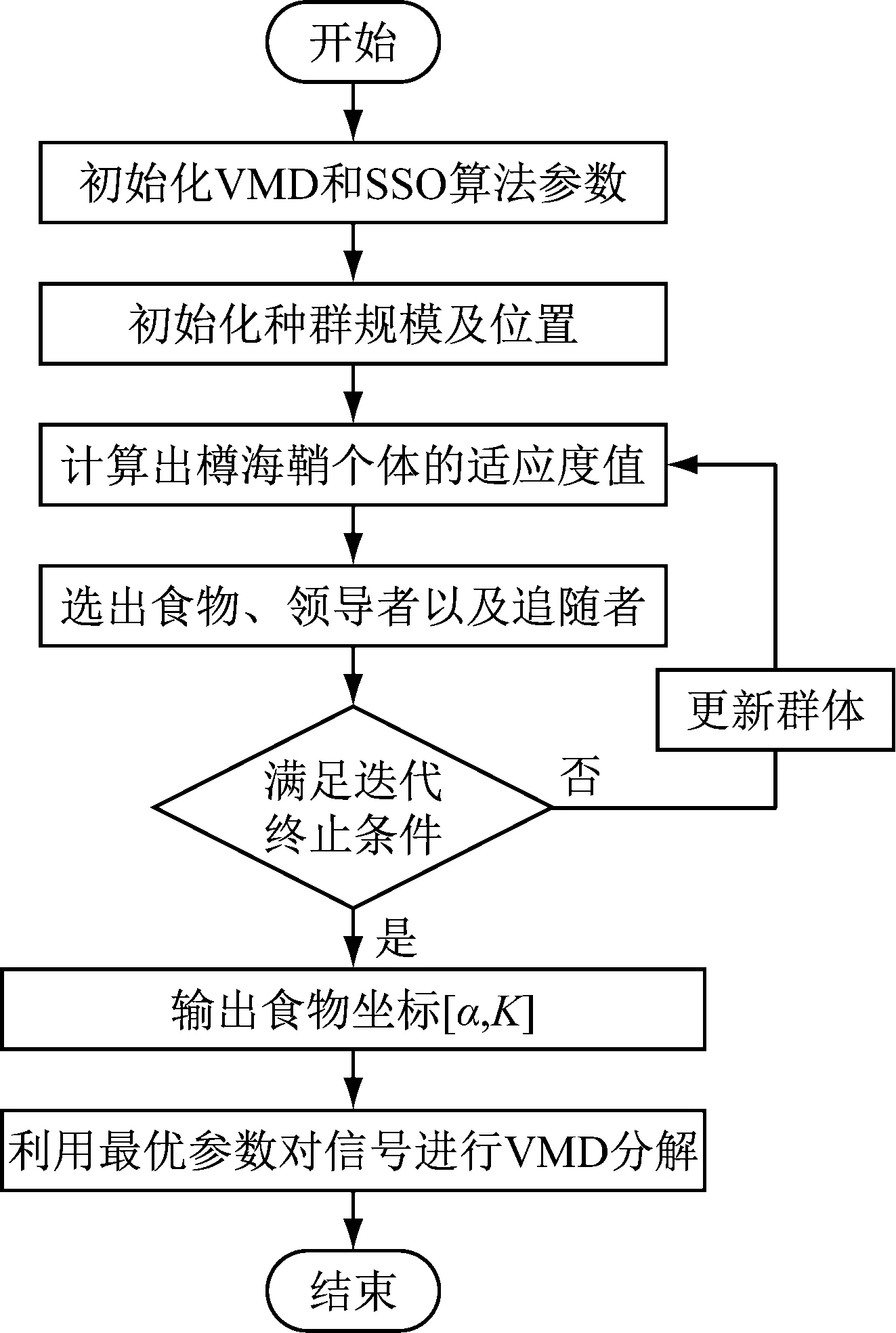
圖1 SSO-VMD流程
步驟1初始化樽海鞘群優(yōu)化算法的各項(xiàng)參數(shù)以及尋優(yōu)參數(shù)尋優(yōu)過程中的適應(yīng)度函數(shù)。
步驟2樽海鞘群優(yōu)化算法中若迭代次數(shù)較少,則會(huì)因前期搜索不充分,導(dǎo)致無法獲取全局最優(yōu)解;反之迭代次數(shù)過大,會(huì)增加尋優(yōu)時(shí)間,影響算法的效率。此外,樽海鞘群優(yōu)化算法的種群規(guī)模通常設(shè)置為10~50之間。因此,針對(duì)VMD參數(shù)尋優(yōu),本文初始化樽海鞘種群規(guī)模為15,設(shè)定最大迭代次數(shù)為30,將參數(shù)組合[α,K]定義為樽海鞘個(gè)體的位置,隨機(jī)產(chǎn)生與種群規(guī)模相對(duì)應(yīng)的參數(shù)組合作為樽海鞘個(gè)體的位置。
步驟3計(jì)算每個(gè)樽海鞘當(dāng)前位置下對(duì)應(yīng)的適應(yīng)度值。
步驟4將樽海鞘個(gè)體按照適應(yīng)度值大小進(jìn)行升序,令排在首位樽海鞘為領(lǐng)導(dǎo)者,剩余為追隨者,并將適應(yīng)度值最小的樽海鞘個(gè)體所處的空間位置定義為當(dāng)前食物位置。
步驟5按照式(4)更新領(lǐng)導(dǎo)者所處空間位置
(4)

c1=2e-(4l/lmax)2
(5)
式中:l為當(dāng)前迭代次數(shù);lmax為最大迭代次數(shù)。
按照式(6)更新追隨者所處空間位置
(6)

步驟6計(jì)算更新后樽海鞘個(gè)體的適應(yīng)度值,并與當(dāng)前食物的適應(yīng)度值進(jìn)行比較,若更新后的樽海鞘適應(yīng)度值優(yōu)于食物,則將該樽海鞘的位置定義為新食物位置。
步驟7重復(fù)步驟5~步驟6,直到滿足迭代終止條件,輸出食物坐標(biāo),即為最佳α和K參數(shù)值。
1.3 仿真實(shí)驗(yàn)
為驗(yàn)證SSO-VMD算法的有效性,將其應(yīng)用于仿真信號(hào)的分解過程,仿真信號(hào)表達(dá)式如下
x(t)=x1(t)+x2(t)+x3(t)+x4(t)
x1(t)=sin(40πt);x2(t)=sin(90πt);
x3(t)=sin(180πt);x4(t)=sin(300πt)
(7)
其中,采樣頻率為3 000,采樣點(diǎn)為1 200,仿真信號(hào)及各分量時(shí)域波形如圖2所示。
為了對(duì)比,本文利用EMD和SSO-VMD對(duì)該信號(hào)進(jìn)行分解,分解結(jié)果分別如圖3和圖4所示,其中SSO-VMD的尋優(yōu)結(jié)果為[295, 4],全局最佳適應(yīng)度值為0.618 2。據(jù)圖3可知,EMD分解得到5個(gè)IMF分量和一個(gè)殘量,出現(xiàn)過分解和模態(tài)混疊現(xiàn)象,且第1個(gè)IMF分量失真嚴(yán)重。據(jù)圖4可知,SSO-VMD可以有效將各分量分離,分解結(jié)果與原信號(hào)分量一致,擁有較好保真度,對(duì)比驗(yàn)證了SSO-VMD算法的優(yōu)越性。
此外,為驗(yàn)證樽海鞘群算法進(jìn)行VMD參數(shù)尋優(yōu)的有效性,利用交叉驗(yàn)證法(Δα=100,ΔK=1)計(jì)算不同參數(shù)組合下的包絡(luò)熵均值,結(jié)果如圖5所示。由圖5可知,當(dāng)參數(shù)組合為[300, 4]時(shí),得到全局最小包絡(luò)熵均值(數(shù)值為0.620 4),這與樽海鞘群算法尋有結(jié)果(尋優(yōu)參數(shù)為[295, 4])較為接近,以此驗(yàn)證將樽海鞘群算法應(yīng)用于VMD參數(shù)尋優(yōu)是切實(shí)可行的。
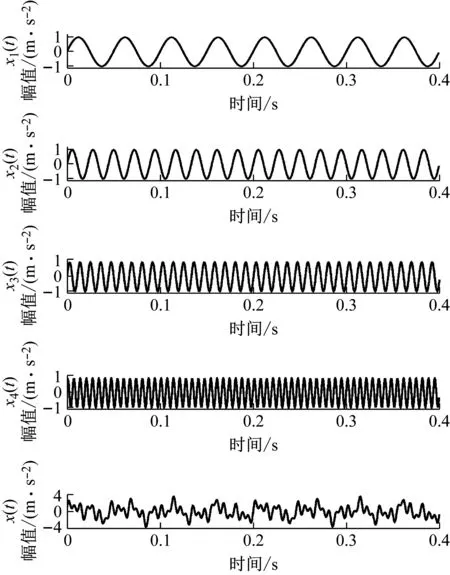
圖2 仿真信號(hào)時(shí)域波形

圖3 EMD分解結(jié)果
2 多域高維特征提取及流形學(xué)習(xí)
2.1 多域高維特征提取
為全面挖掘出能反映行星齒輪箱不同工況下的特征信息,本文提取振動(dòng)信號(hào)16個(gè)時(shí)域特征值,13個(gè)頻域特征參數(shù)和20個(gè)尺度域特征參數(shù),各特征值表達(dá)式如表1所示,其中,TF1~TF16為時(shí)域特征參數(shù),F(xiàn)F1~FF13為頻域特征參數(shù),CF1~CF20為尺度域特征參數(shù)。然后對(duì)各域特征值分別進(jìn)行歸一化處理,合并成多域高維故障特征。
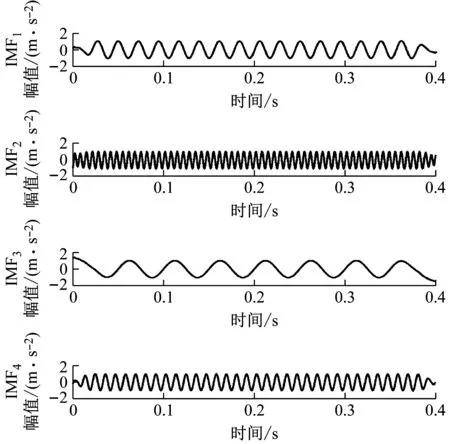
圖4 SSO-VMD分解結(jié)果
顯然,所得多域故障特征集具有高維、非線性、冗余等特性,對(duì)數(shù)據(jù)的后續(xù)處理帶來一定困難。為進(jìn)一步提取低維、敏感故障特征,本文將流形學(xué)習(xí)算法引入至該高維故障特征集的維數(shù)約簡(jiǎn)過程。
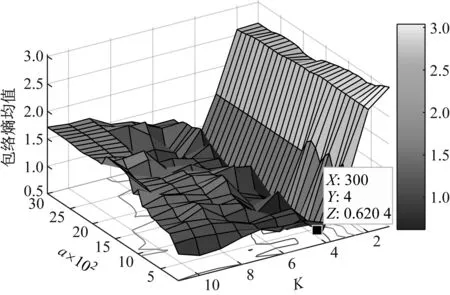
圖5 交叉尋優(yōu)結(jié)果
2.2 改進(jìn)監(jiān)督型自適應(yīng)自組織增量學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)界標(biāo)點(diǎn)等度規(guī)映射算法
界標(biāo)點(diǎn)等度規(guī)映射(L-Isomap)算法是一種經(jīng)典流形學(xué)習(xí)算法,能夠有效挖掘出嵌入在高維空間的低維流形,但該算法存在以下3點(diǎn)缺陷:① 界標(biāo)點(diǎn)選取問題,當(dāng)界標(biāo)點(diǎn)選取不當(dāng),會(huì)導(dǎo)致降維效果大大折扣;②該方法為無監(jiān)督降維算法,未充分利用面向分類的類判別特征,不太適合行星齒輪箱故障信號(hào)這類存在諸多奇異數(shù)據(jù)點(diǎn)的情況;③ L-Isomap僅考慮樣本點(diǎn)之間的歐式距離,但歐氏距離只能反映樣本點(diǎn)之間的空間位置關(guān)系,不能反映流形結(jié)構(gòu)關(guān)系。針對(duì)上述問題,文獻(xiàn)[15]提出一種改進(jìn)監(jiān)督型自組織增量學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)界標(biāo)點(diǎn)等度規(guī)映射算法(ISSL-Isomap),有效克服以上3點(diǎn)不足,并通過仿真實(shí)驗(yàn)驗(yàn)證該方法的優(yōu)越性,因此本文將其應(yīng)用于多域故障特征維數(shù)約簡(jiǎn)過程。對(duì)于高維空間樣本集X={x1,…,xi,…,xN},xi∈RD,ISSL-Isomap算法的具體步驟如下:

表1 多域特征參數(shù)
步驟1利用自組織增量學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)算法確定界標(biāo)點(diǎn)集合L={xl1,xl2,…,xln};
步驟2采用余弦相似度與歐氏距離相結(jié)合的距離度量方式,構(gòu)建改進(jìn)距離矩陣D={dij(xi,xj)}:
(8)
步驟3構(gòu)建監(jiān)督型成對(duì)約束鄰域圖GML(V,E)和GLL(V,E);
步驟4建立監(jiān)督型距離矩陣Ds={ds(xi,xj)},表達(dá)式下
(9)
步驟5利用Dijkstra方法尋找最短路徑,構(gòu)造近似測(cè)地距離矩陣xG={dG(xli,xj)}n×N;
步驟6運(yùn)用多維標(biāo)度分析(Multidimensional Scaling, MDS)算法對(duì)界標(biāo)點(diǎn)進(jìn)行低維映射,得到界標(biāo)點(diǎn)低維坐標(biāo)YL;
步驟7應(yīng)用界標(biāo)點(diǎn)多維標(biāo)度分析(Landmark MDS, LMDS)算法計(jì)算非界標(biāo)點(diǎn)數(shù)據(jù)的低維坐標(biāo)YN-L。
3 行星齒輪箱故障診斷實(shí)驗(yàn)分析
3.1 故障診斷模型
提出一種基于參數(shù)優(yōu)化變分模態(tài)分解和多域流形學(xué)習(xí)的行星齒輪箱故障診斷方法,流程如圖6所示,具體步驟如下:
步驟1信號(hào)采集:在一定采樣頻率fs下,分別采集Q種工況下行星齒輪箱故障振動(dòng)加速度信號(hào)q組,共計(jì)Q×q組信號(hào);
步驟2信號(hào)降噪:利用樽海鞘群優(yōu)化變分模態(tài)分解算法(SSO-VMD)對(duì)各組加速度振動(dòng)信號(hào)進(jìn)行分解,并將所得若干IMF分量進(jìn)行重構(gòu);
步驟3多域故障特征構(gòu)建:對(duì)重構(gòu)信號(hào)進(jìn)行多域特征參數(shù)提取,Q×q組樣本即可得到高維故障特征集F(Q×q)×49;
步驟5模式識(shí)別:每種工況隨機(jī)挑選p組樣本的低維故障特征作為訓(xùn)練樣本,用于構(gòu)建人工蜂群優(yōu)化支持向量機(jī)(ABC-SVM)多故障預(yù)測(cè)模型(采用一對(duì)一的方式),剩余q-p組樣本的低維故障特征作為測(cè)試樣本,輸入至預(yù)測(cè)模型中進(jìn)行診斷識(shí)別,確定故障類型。

圖6 故障診斷模型
3.2 故障診斷實(shí)驗(yàn)分析
為驗(yàn)證本文所提方法的有效性,在行星齒輪箱實(shí)驗(yàn)臺(tái)上進(jìn)行了太陽輪正常狀態(tài),磨損狀態(tài),裂紋狀態(tài)和斷齒狀態(tài)等4種工況的瞬態(tài)實(shí)驗(yàn)。實(shí)驗(yàn)平臺(tái)及故障分布如圖7所示。本次實(shí)驗(yàn)設(shè)置電機(jī)轉(zhuǎn)速為600 r/min,采樣頻率為fs=10 240 Hz,利用1號(hào)傳感器進(jìn)行樣本信號(hào)的采集,按照時(shí)間順序以2 048個(gè)采樣點(diǎn)為一組樣本,每種工況各采集100組樣本,四種工況共計(jì)400組樣本,不同工況下的振動(dòng)加速度信號(hào)時(shí)域波形如圖8所示。
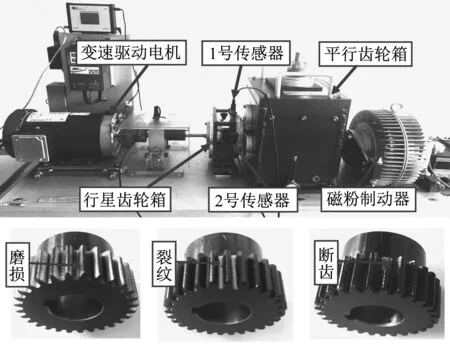
圖7 實(shí)驗(yàn)平臺(tái)及故障分布
由圖8可知,僅從信號(hào)時(shí)域波形無法有效區(qū)分出各工況類型,并且實(shí)驗(yàn)采集的信號(hào)存在一定噪聲干擾,因此根據(jù)故障診斷模型步驟2所示,利用SSO-VMD對(duì)上述信號(hào)進(jìn)行分解與重構(gòu)。以一組斷齒信號(hào)為例,利用SSO-VMD算法對(duì)其進(jìn)行降噪,其中,SSO算法對(duì)VMD參數(shù)尋優(yōu)結(jié)果為[708, 3],全局最佳適應(yīng)度值為2.687 0,并對(duì)上述各IMF分量進(jìn)行重構(gòu),即可得到降噪后的故障信號(hào),對(duì)應(yīng)分解與重構(gòu)結(jié)果如圖9所示。
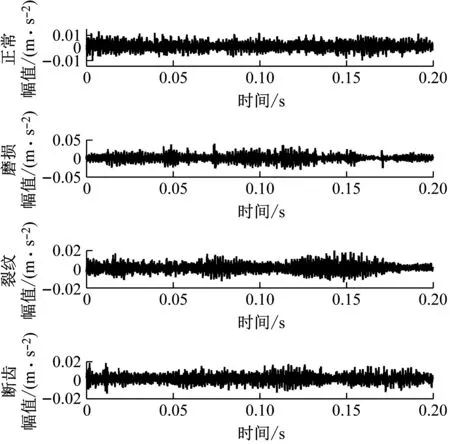
圖8 4種工況振動(dòng)加速度信號(hào)時(shí)域波形

圖9 SSO-VMD對(duì)斷齒信號(hào)分解與重構(gòu)結(jié)果
為全面表征不同工況故障信息,對(duì)上述4種工況各100組樣本分別從時(shí)域、頻域和尺度域等方面進(jìn)行多域高維故障特征提取,400組樣本即可得到49維數(shù)特征矩陣F400×49,4種工況均值特征曲線如圖10所示。為量化多域特征提取效果,將時(shí)域特征提取結(jié)果、頻域特征提取結(jié)果、尺度域特征提取結(jié)果和多域特征提取結(jié)果分別輸入至ABC-SVM多故障分類器中進(jìn)行模式識(shí)別,其中每類工況訓(xùn)練樣本與測(cè)試樣本按4∶6隨機(jī)分配,定義訓(xùn)練樣本3折交叉后的平均識(shí)別率為適應(yīng)度值,設(shè)置蜂群規(guī)模為20,終止迭代為100,蜜源數(shù)為10,控制參數(shù)為100,4種特征提取效果如表2所示。據(jù)表2可知,多域特征提取具有最高平均識(shí)別精度(達(dá)到69.58%),提取效果明顯效果優(yōu)于時(shí)域、頻域、尺度域等單域特征提取效果(平均識(shí)別精度分別為56.25%, 47.50%, 58.75%)。但因多域特征提取存在信息冗余,因此需要利用降維方法進(jìn)行敏感、低維故障特征的二次提取。
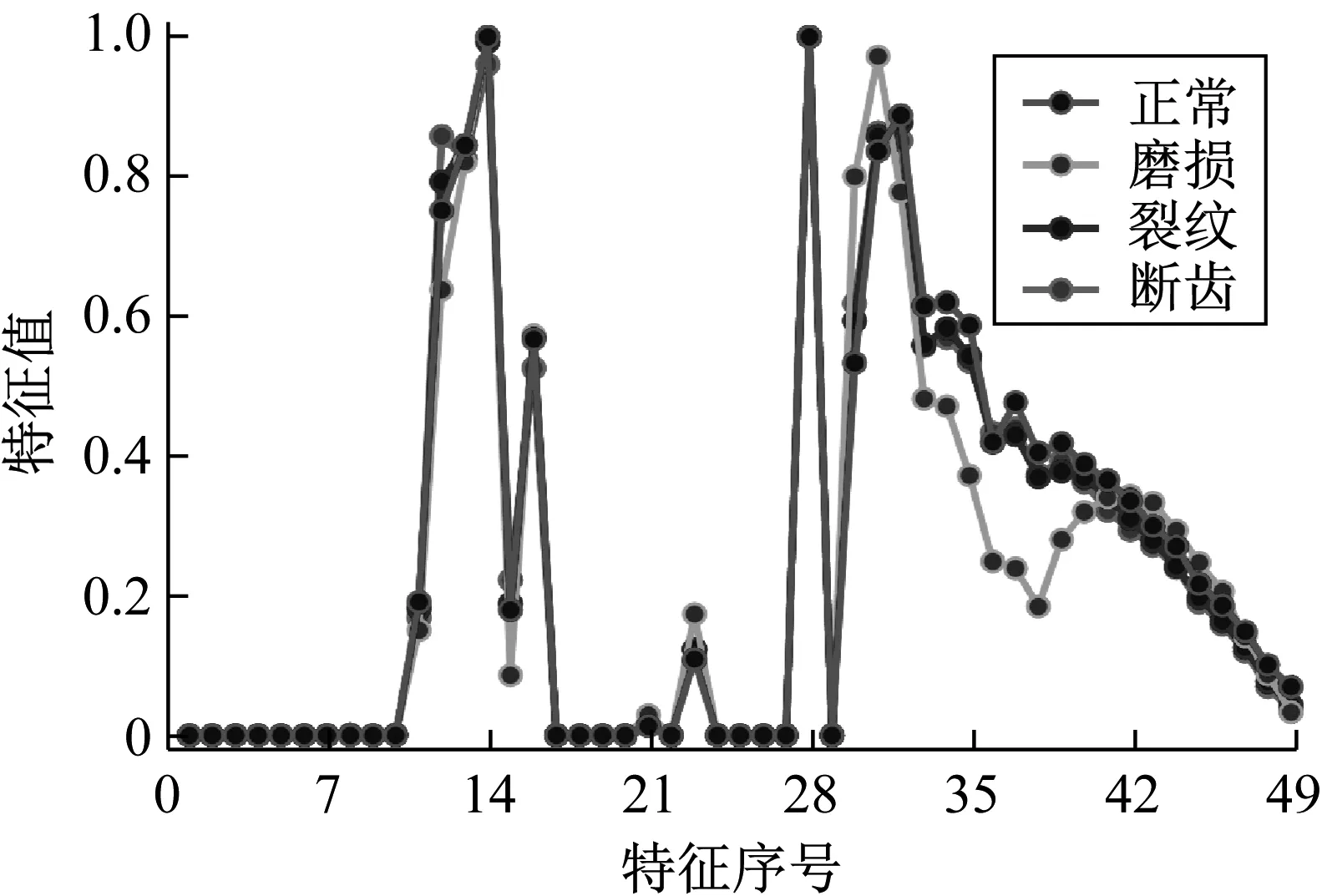
圖10 4種工況均值特征曲線
利用ISSL-Isomap流形學(xué)習(xí)算法對(duì)多域故障特征集進(jìn)行維數(shù)約簡(jiǎn),為驗(yàn)證該算法優(yōu)越性,將其與Isomap、t-分布鄰域嵌入算法(t-SNE)、線性判別分析(Linear Discriminant Analysis, LDA)[17]、加權(quán)Isomap (Weighted Isomap, W-Isomap)[18]和監(jiān)督Isomap(Super-vised Isomap, S-Isomap)[19]等無監(jiān)督、監(jiān)督降維方法進(jìn)行對(duì)比。其中,利用最大似然估計(jì)法確定本征維數(shù)為5,通過多次實(shí)驗(yàn)確定各算法最佳參數(shù),分別設(shè)置如下:Isomap近鄰參數(shù)設(shè)置為63;W-Isomap近鄰參數(shù)設(shè)置為45,權(quán)重因子設(shè)置為0.45;S-Isomap近鄰參數(shù)設(shè)置為74,參數(shù)α設(shè)置為0.38;ISSL-Isomap近鄰參數(shù)設(shè)置為66,調(diào)節(jié)因子1為平均改進(jìn)距離,調(diào)節(jié)因子2設(shè)置為0.4,6種方法前三維可視化結(jié)果如圖11所示。據(jù)圖11可知,Isomap,t-SNE和LDA降維結(jié)果四類樣本混疊嚴(yán)重,無法有效將四類樣本分離開,降維效果最差;W-Isomap和S-Isomap可將四類樣本基本分離,但磨損狀態(tài)與正常狀態(tài)存在樣本混疊現(xiàn)象,且各類樣本較為分散,降維效果較差;ISSL-Isomap可將四類樣本完全區(qū)分開,并且各類樣本較為集中,降維效果最好。分析其原因在于:Isomap和t-SNE為無監(jiān)督流形學(xué)習(xí)方法,降維過程未考慮樣本標(biāo)簽信息,不太適合行星齒輪箱故障信號(hào)這類存在諸多奇異數(shù)據(jù)點(diǎn)的情況;LDA為線性監(jiān)督型降維方法,不能有效對(duì)非線性故障特征進(jìn)行維數(shù)約簡(jiǎn);W-Isomap,S-Isomap為監(jiān)督型流形學(xué)習(xí)方法,能夠基本將各類樣本分離開,但這兩種算法僅考慮樣本空間位置,因此降維效果不如綜合考慮樣本空間位置和夾角信息的ISSL-Isomap算法。綜上驗(yàn)證利用ISSL-Isomap對(duì)多域故障特征進(jìn)行降維處理的有效性。

表2 單域和多域特征提取效果
為量化上述6種方法降維效果,從降維性能指標(biāo)和故障識(shí)別精度兩方面進(jìn)行分析。其中,將類間距與類內(nèi)距的比值作為降維性能指標(biāo),比值越大,表明同類樣本越集中,異類樣本越分散;將各算法特征壓縮結(jié)果分別輸入至ABC-SVM多故障分類器中進(jìn)行識(shí)別,6種算法的降維效果如表3所示。

(a) Isomap降維后的三維可視化結(jié)果

(b) t-SNE降維后的三維可視化結(jié)果
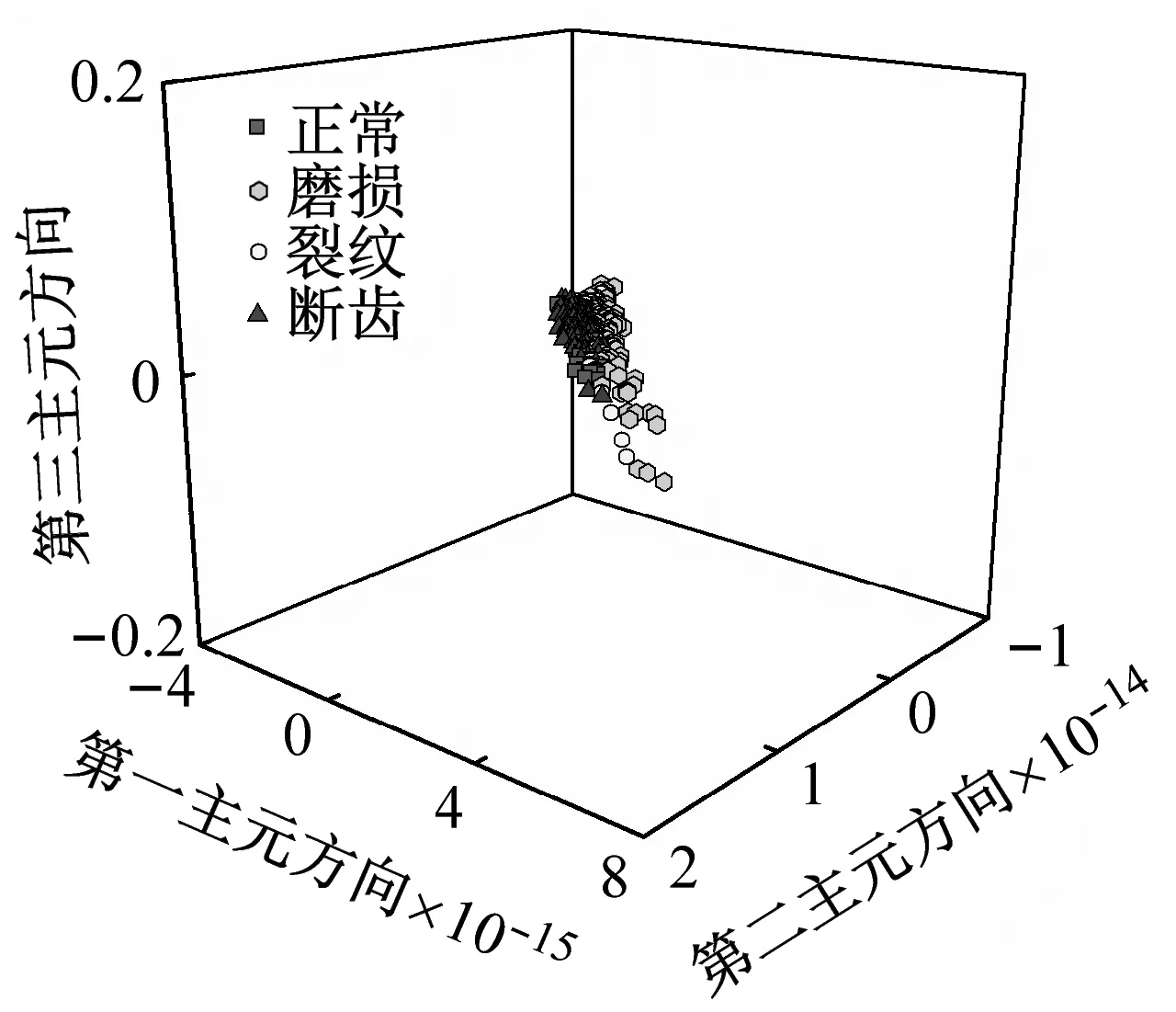
(c) LDA降維后的三維可視化結(jié)果
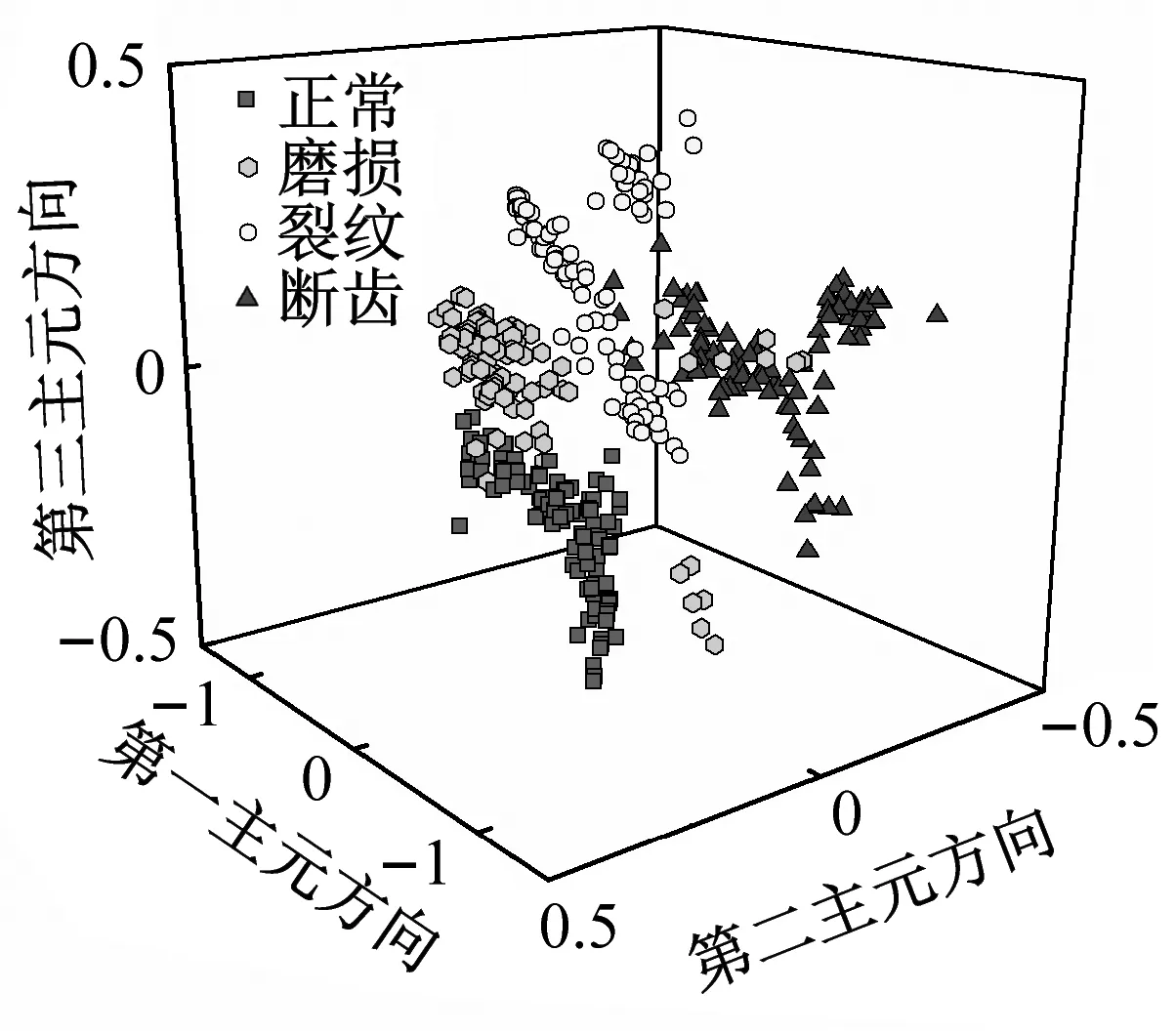
(d) W-Isomap降維后的三維可視化結(jié)果
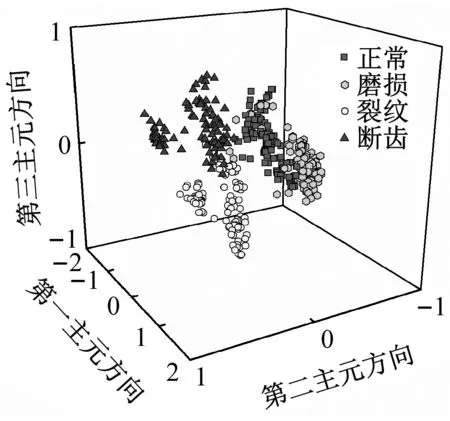
(e) S-Isomap降維后的三維可視化結(jié)果
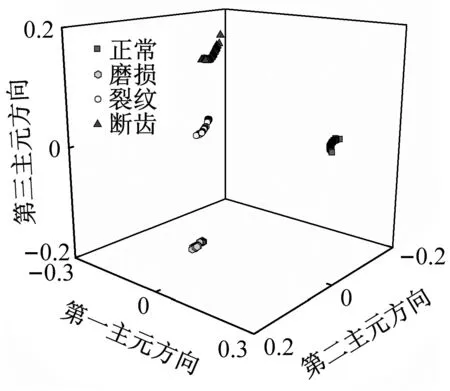
(f) ISSL-Isomap降維后的三維可視化結(jié)果
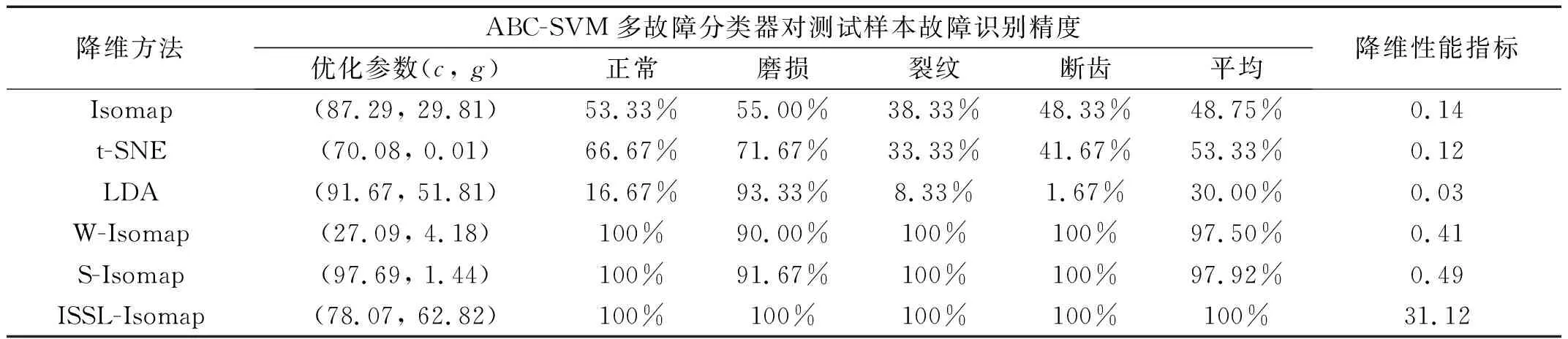
表3 6種算法降維性能指標(biāo)和故障識(shí)別精度
由表3可知,ISSL-Isomap算法有著最大降維性能指標(biāo)和最高故障識(shí)別進(jìn)度,進(jìn)一步驗(yàn)證ISSL-Isomap對(duì)多域故障特征進(jìn)行降維處理優(yōu)越性;所提“SSO-VMD+多域故障特征+ISSL-Isomap+ABC-SVM”故障診斷模型對(duì)行星齒輪箱不同工況的故障識(shí)別率達(dá)到100%,能夠精準(zhǔn)的將四類樣本區(qū)分開,以此驗(yàn)證該模型的有效性。
最后,為驗(yàn)證ABC-SVM多故障分類器進(jìn)行模式識(shí)別的優(yōu)越性,將其與粒子群優(yōu)化支持向量機(jī)(Particle Swarm Optimization Support Vector Machine, PSO- SVM)[20]多故障分類器進(jìn)行對(duì)比,將6種算法的降維結(jié)果(橫坐標(biāo)1, 2, 3, 4, 5, 6分別表示Isomap, t-SNE, LDA, W-Isomap, S-Isomap以及ISSL-Isomap)分別輸入至兩種分類器中進(jìn)行識(shí)別,其中每類工況訓(xùn)練樣本與測(cè)試樣本按4:6隨機(jī)分配;PSO-SVM中粒子群規(guī)模為20,終止迭代為100,局部搜索能力為2,全局搜索能力為2,將訓(xùn)練樣本3折交叉后的平均識(shí)別率定為適應(yīng)度函數(shù),2種分類器對(duì)6種特征提取方法的測(cè)試樣本識(shí)別結(jié)果如圖12所示。據(jù)圖12可知:2種多故障分類器對(duì)“SSO-VMD+多域故障特征+ISSL-Isomap”的特征提取均達(dá)到100%,驗(yàn)證了所提特征提取方法的優(yōu)越性;與PSO-SVM多故障分類器相比,ABC-SVM多故障分類器對(duì)6種方法特征提取結(jié)果的測(cè)試樣本平均識(shí)別率均為最高,驗(yàn)證了利用ABC-SVM進(jìn)行故障診斷識(shí)別的優(yōu)勢(shì)。

圖12 2種分類器對(duì)比
4 結(jié) 論
(1) 提出一種參數(shù)優(yōu)化變分模態(tài)分解算法——SSO-VMD,將樽海鞘群算法應(yīng)用于VMD的參數(shù)選取問題,仿真實(shí)驗(yàn)結(jié)果表明該方法能夠避免EMD的模態(tài)混疊和過分解現(xiàn)象,并且SSO算法能有效搜索出VMD的全局最佳參數(shù)。
(2) 建立一種基于參數(shù)優(yōu)化變分模態(tài)分解和多域流形學(xué)習(xí)的行星齒輪箱故障診斷模型,故障診斷實(shí)驗(yàn)表明:多域特征提取方法優(yōu)于時(shí)域、頻域、尺度域等單域特征提取方法;ISSL-Isomap降維效果優(yōu)于Isomap,t-SNE,LDA,W-Isomap和S-Isomap等算法;ABC-SVM分類器的識(shí)別效果優(yōu)于現(xiàn)有的PSO-SVM分類器;所提故障診斷方法的故障識(shí)別率達(dá)到100%,可以有效、精準(zhǔn)的診斷出行星齒輪箱各故障類型。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:00
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
- 振動(dòng)與沖擊的其它文章
- 時(shí)滯反饋對(duì)三穩(wěn)態(tài)van der Pol系統(tǒng)穩(wěn)態(tài)概率密度的影響
- 一種基于多測(cè)量向量模型的機(jī)械振動(dòng)信號(hào)聯(lián)合稀疏重構(gòu)方法
- 不同沖擊幅值下洞室圍巖變形-開裂-垮塌過程
——基于連續(xù)-非連續(xù)方法 - 基于BOX-COX變換的橋梁結(jié)構(gòu)地震易損性分析
- 參外聯(lián)合激勵(lì)下一類混沌系統(tǒng)的動(dòng)力學(xué)機(jī)理
- 考慮場(chǎng)地土參數(shù)隨機(jī)性和相關(guān)性的地震動(dòng)降維模擬