時滯反饋對三穩態van der Pol系統穩態概率密度的影響
2021-01-18 03:02:56段緒星吳志強李亞杰
振動與沖擊 2021年1期
關鍵詞:系統
段緒星, 吳志強, 李亞杰
(1.天津大學 力學系,天津 300350;2.天津市非線性動力學與混沌控制重點實驗室,天津 300350)
噪聲激勵下非線性系統的動力學行為及其控制近些年來引起了國內外學者的廣泛關注。噪聲激勵可以引發一系列動力學現象,如相干共振[1-2]、隨機P分岔[3]、首次穿越[4-5]等。針對這些現象,人們引入了多種手段對其進行調控,如時滯差分反饋控制[6]、分數階控制[7]等。因沒有通用設計方法,人們常通過探討控制參數的影響來為控制參數的選擇提供參考。
廣義van der Pol方程能呈現平衡點與極限環共存的多穩態現象,常作為多穩態系統的范例來探究隨機激勵的影響。Yamapi等[8]研究了高斯白噪聲激勵下的雙穩態van der Pol系統,發現噪聲強度可被看做系統的分岔參數。Mbakob等[9]研究了相關噪聲誘導的隨機P分岔現象,發現相關時間和噪聲強度均能引起系統幅值概率密度曲線的定性變化。Zakharova等[10]的研究結果指出當雙穩態van der Pol系統的穩定系數位于鞍結分岔點附近時,相干共振和隨機P分相關。郝穎等[11]基于奇異性理論求出了噪聲激勵下三穩態van der Pol-Duffing系統幅值概率密度拓撲結構發生改變的臨界參數條件。Zhang等[12]研究了循環噪聲激勵下的三穩態van der Pol系統,發現循環噪聲的時滯和比例系數均會誘導系統發生隨機P分岔。
近年來,諸多學者開始將時滯反饋控制應用到van der Pol系統中。Guo等[13]研究了位移和速度時滯反饋共同作用下的雙穩態van der Pol系統,分析了時滯對系統雙穩態區域的影響以及反饋強度和時滯引起的隨機P分岔現象。Semenov 等[14]的研究結果表明時滯差分反饋可以控制van der Pol系統在Hopf分岔點附近的相干共振。Yang等[15]研究了多種噪聲激勵與時滯反饋共同作用下的雙穩態van der Pol系統,發現其平均首次穿越時間與噪聲強度以及系統振蕩的主頻有關。
當前關于三穩態van der Pol系統的理論研究,均是以分析不同類型噪聲誘導的隨機P分岔現象為主,對于引入時滯反饋控制的三穩態van der Pol系統的研究還未有涉及。本文主要研究時滯位移差分反饋對加性噪聲激勵下三穩態van der Pol系統穩態概率密度的影響。第1章應用隨機平均法求解系統幅值的穩態概率密度函數;第2章分析確定性及隨機情況下無時滯反饋調節系統的穩態響應,第3章從理論和數值兩方面討論存在時滯反饋時,反饋強度和時滯對系統穩態概率密度的影響,并給出了用于時滯反饋控制器參數設計的轉遷集;第4章給出本文的結論。
1 理論模型及其幅值概率密度近似解
考慮加性高斯白噪聲激勵與時滯位移差分反饋共同作用下的廣義van der Pol振子
K(x(t-τ)-x(t))+ξ(t)
(1)
為方便討論時滯反饋的影響,下文如不特別說明,系統參數均取定值,其中ε=-0.172,α1=2.45,α2= 4.6,α3=2.5,α4=0.4,K為時滯反饋強度,τ為時滯(τ>0),ξ(t)是強度為D的高斯白噪聲,且其均值和相關函數滿足:〈ξ(t)〉=0,〈ξ(t)ξ(t+t1)〉=2Dδ(t1)。
系統(1)的解可設為如下形式:
(2)
其中A(t)、ψ(t)為關于時間t的隨機過程。根據文獻[16-17]可知,當時滯τ很小時,有

(3)
則系統(1)可表示為如下等效系統
(4)
其中
(5)
為求解系統(4)幅值的穩態概率密度函數,引入如下變換
(6)
式中:a(t)為系統響應的幅值;ω為系統(4)的固有頻率;θ(t)為初始相位。將式(6)代入式(4)中,得到標準方程如下
(7)
其中
f(acosφ,-asinφ)=(c+α1a2cos2φ-α2a4cos4φ+
α3a6cos6φ-α4a8cos8φ)aωsinφ
(8)
式(7)中高斯白噪聲為平穩過程,(a,θ)近似為二維擴散過程,應用隨機平均法,可得到穩態響應幅值a(t)和相位θ(t)的伊藤隨機微分方程
(9)
其中
(10)
W1(t)和W2(t)是兩個相互獨立的單位維納過程。幅值a不依賴于θ的變化,且a(t)是一個一維擴散過程,因此可得到其對應的FPK方程如下
(11)
(12)
(13)
2 無時滯反饋系統的穩態響應
首先考慮無時滯反饋,即K=0的情況,此時系統(1)變為如下形式
(14)
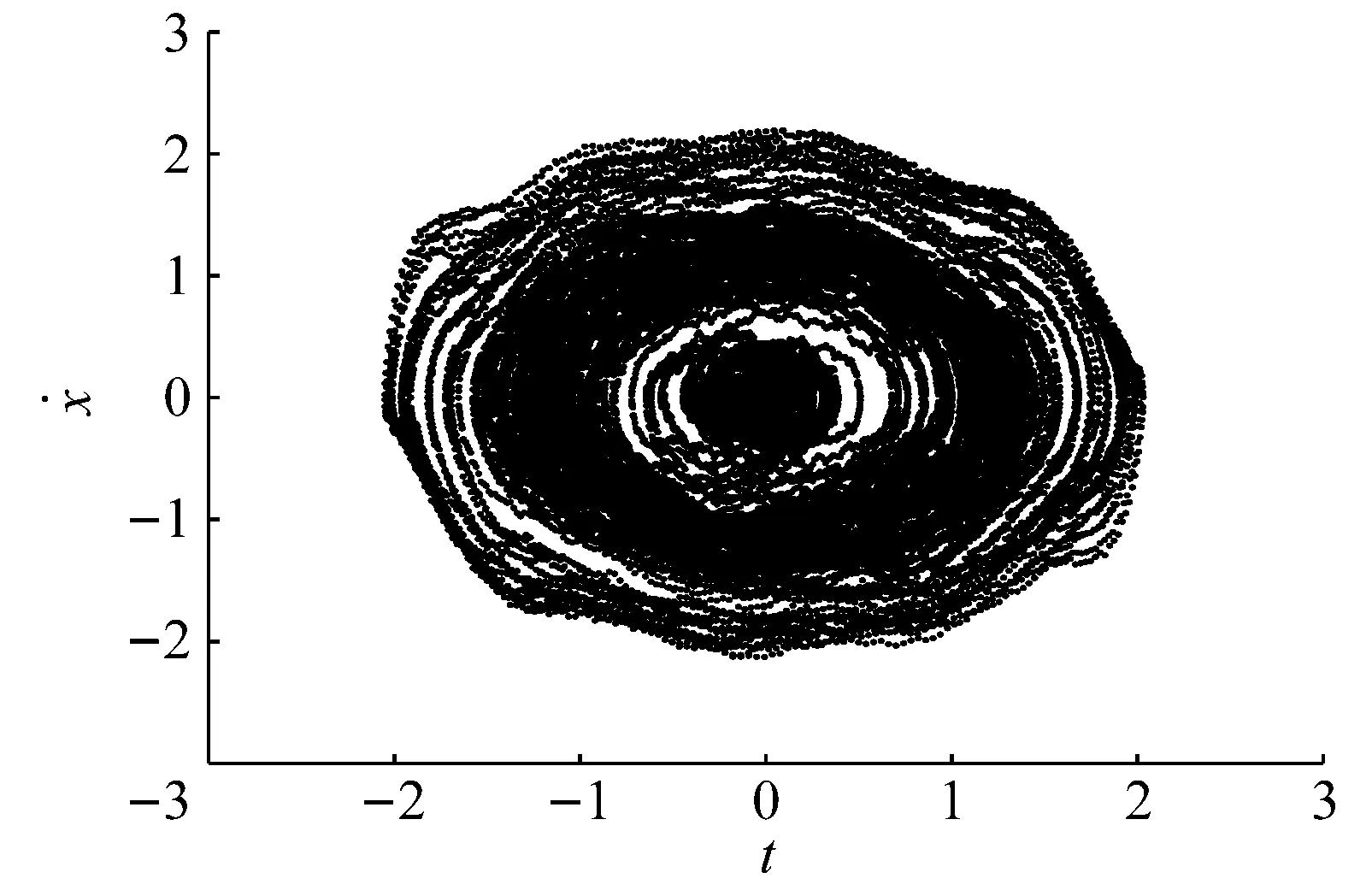
當噪聲激勵強度D=0時,系統(14)退化為確定性系統,為了更好地說明該確定性系統的三穩態特性,圖1給出了不同初始條件下確定性系統響應的相圖。可見當初始條件不同時,系統存在三種吸引子,分別為大極限環、小極限環和零平衡點。

圖1 不同初始條件下確定性系統響應的相圖
由于確定性系統的三穩態特性,當存在噪聲激勵,即噪聲強度D≠0時,此時系統的響應會在零平衡點附近的振蕩、小幅值振蕩和大幅值振蕩這三種振蕩模式間切換,如圖2所示。同時圖3給出了系統幅值的穩態概率密度曲線,其中實線為理論結果,星號為Monte Carlo數值模擬的結果。可見當D=0.01時,穩態概率密度函數曲線存在三個峰,且此時系統小幅值振蕩的概率較大。對于時滯位移差分如何影響隨機系統的響應將在下節討論。
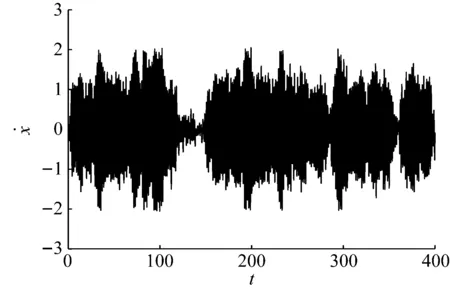
(a) 位移的時間歷程
(b) 響應的相圖
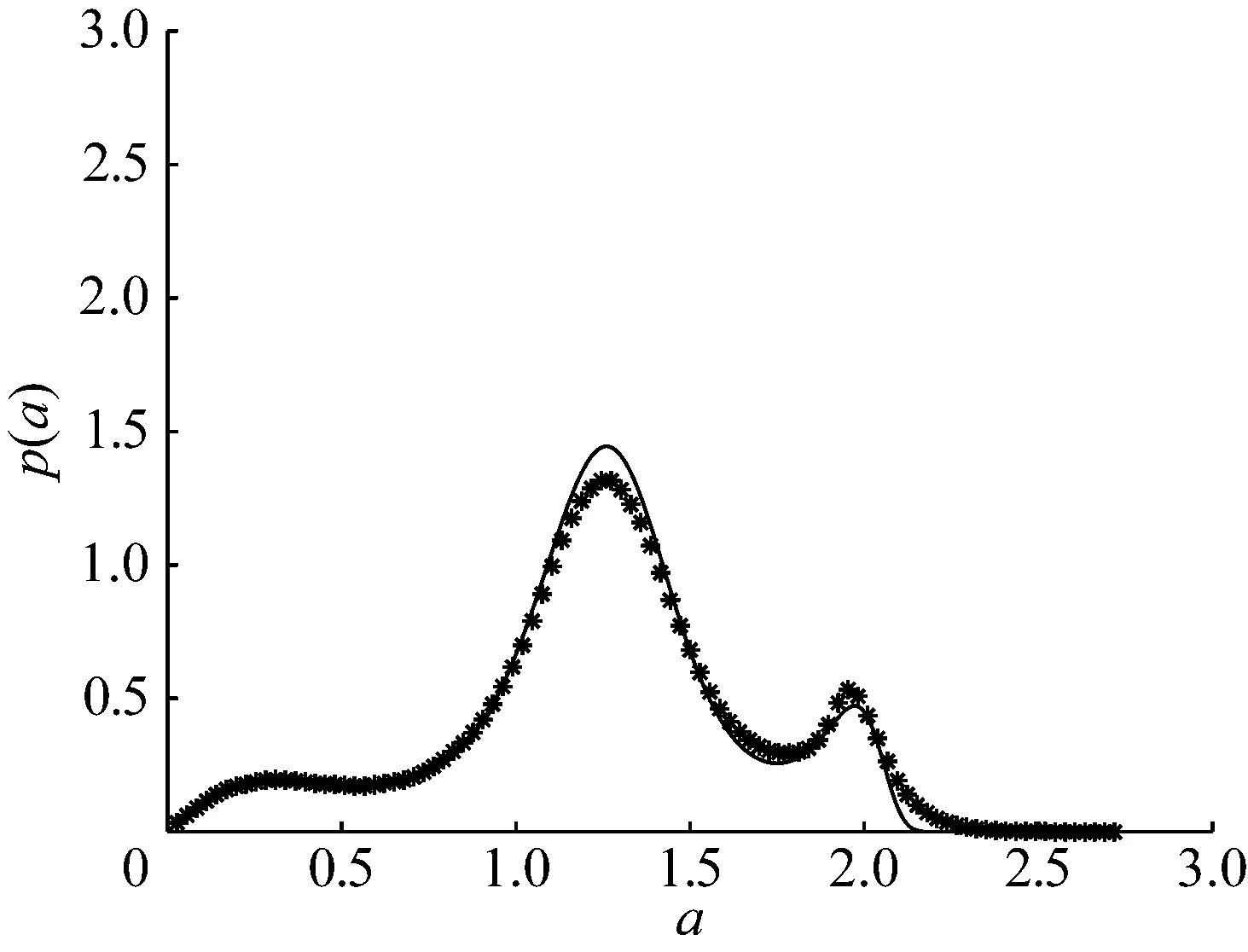
圖3 D=0.01時系統穩態概率密度曲線
3 時滯反饋對系統穩態概率密度的影響
3.1 時滯對穩態概率密度的影響
取定反饋強度K=0.5,探討時滯τ對系統穩態概率密度的影響。根據式(13)可得噪聲強度D=0.01時穩態概率密度函數極值點am隨時滯τ的演化圖,如圖4所示,其中實線代表函數的極大值點、虛線代表函數的極小值點。對每一組參數下的原系統(1)進行Monte Carlo模擬,并提取概率密度分布的極大值點和極小值點便可驗證理論結果的正確性,數值結果也在圖4中給出,其中星號為數值方法得到的概率密度分布的極大值點,圓圈為數值方法得到的概率密度分布的極小值點。可見當時滯τ分別在區間[0,0.045)、[0.045,0.107)、[0.107,0.3]時,概率密度函數極值點的分布有本質區別。
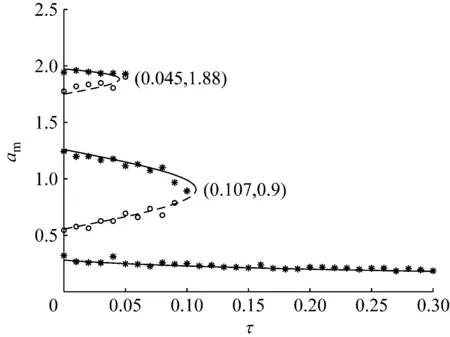
圖4 D=0.01時極值點am隨時滯τ的演化
(a) τ=0.02
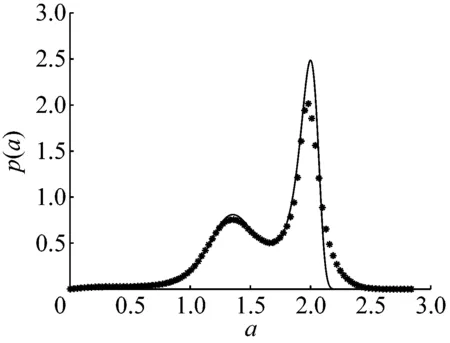
(b) τ=0.08
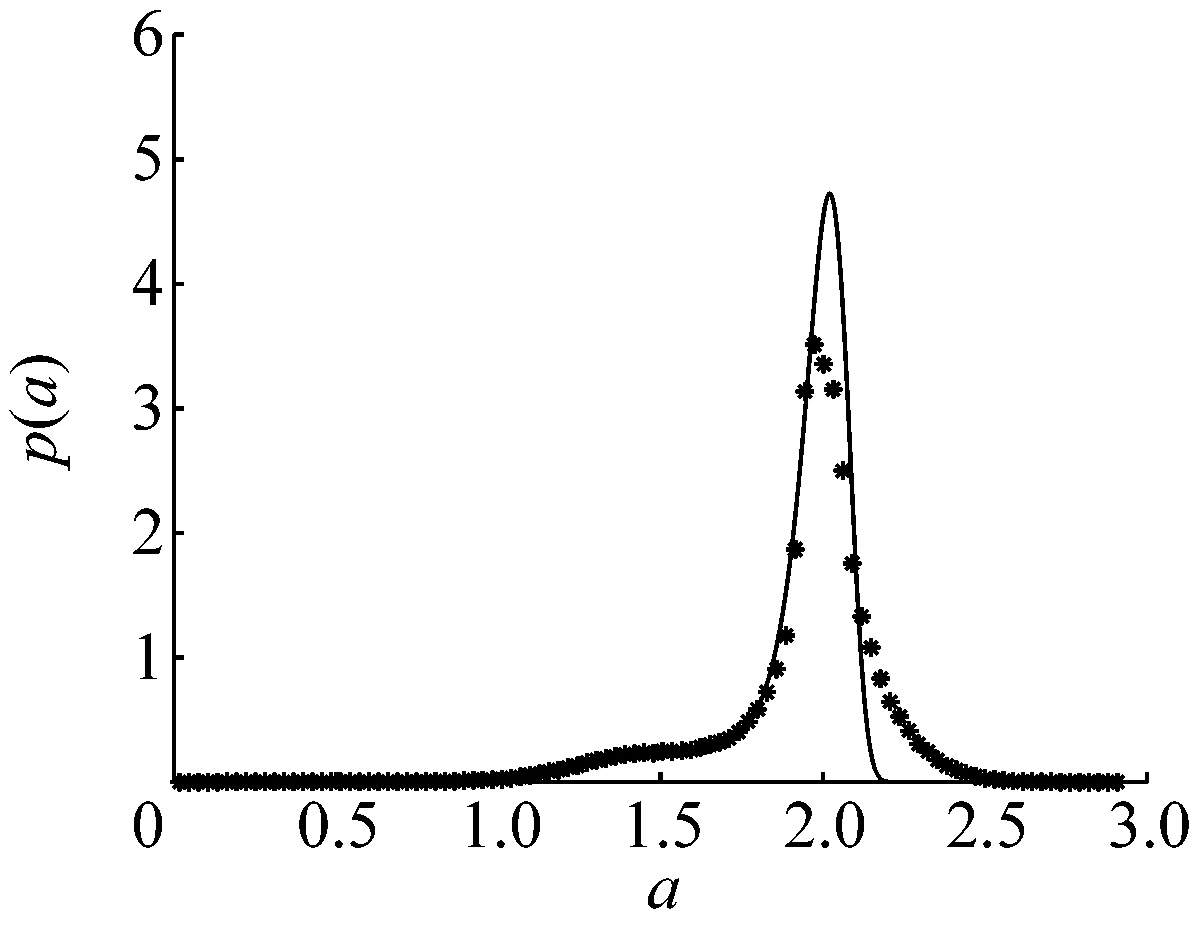
(c) τ=0.14
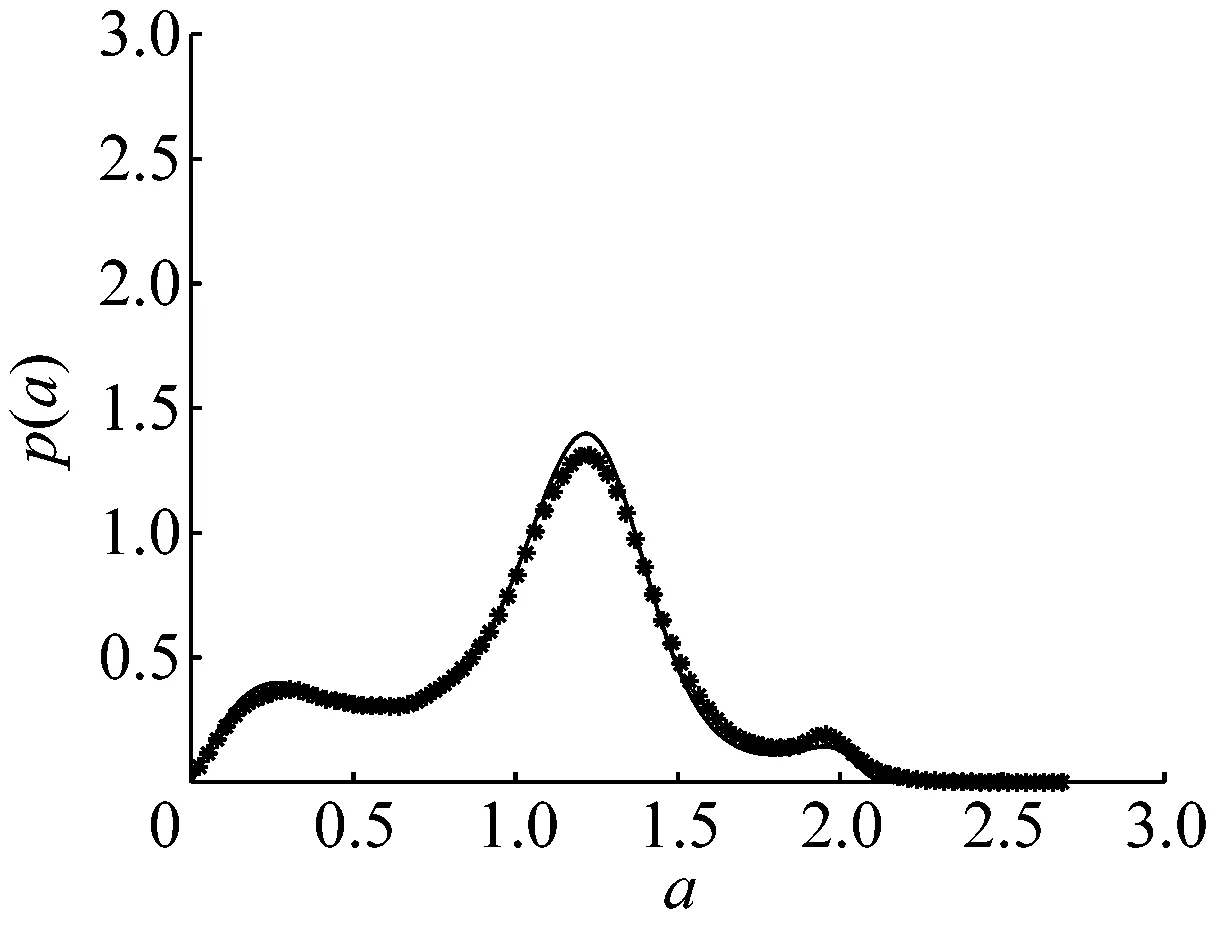
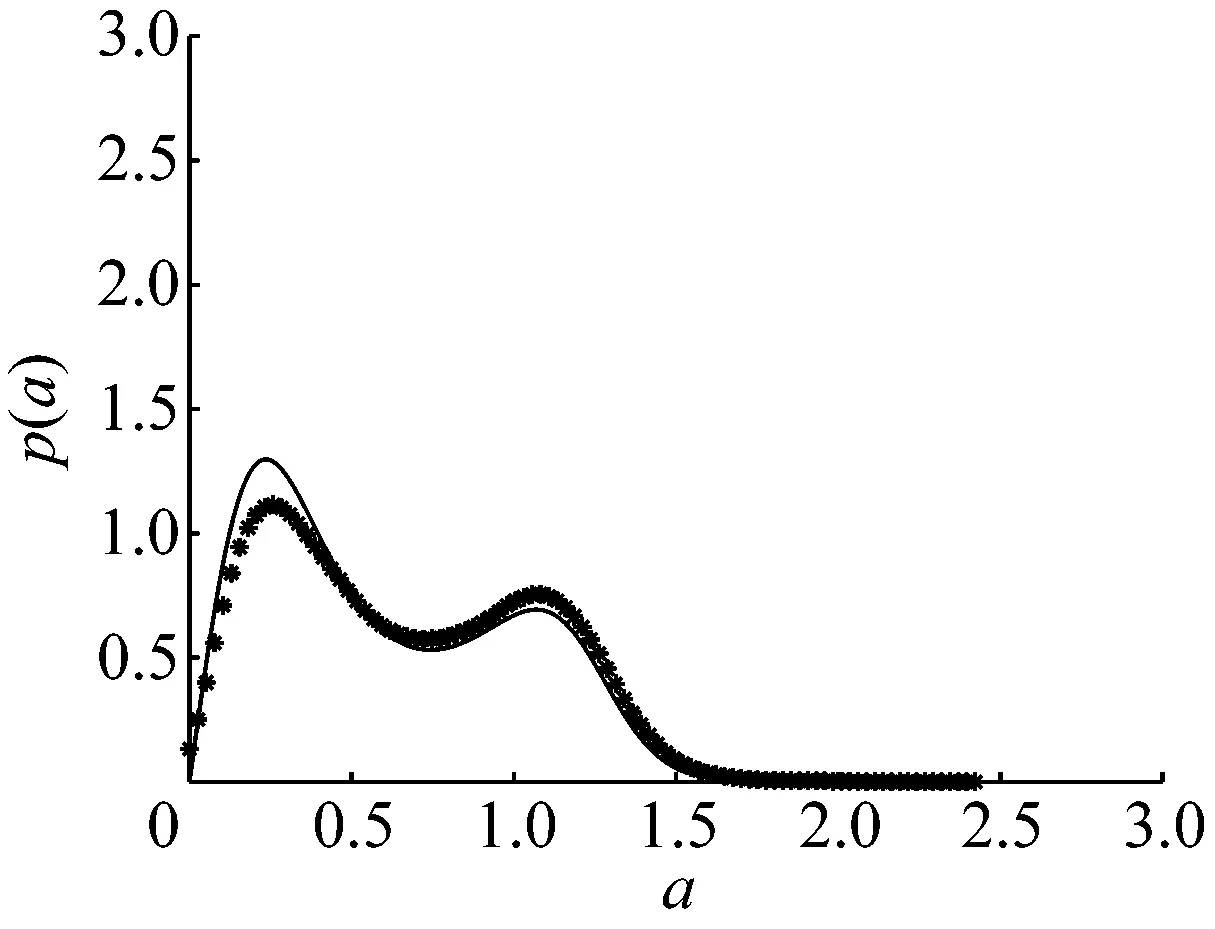
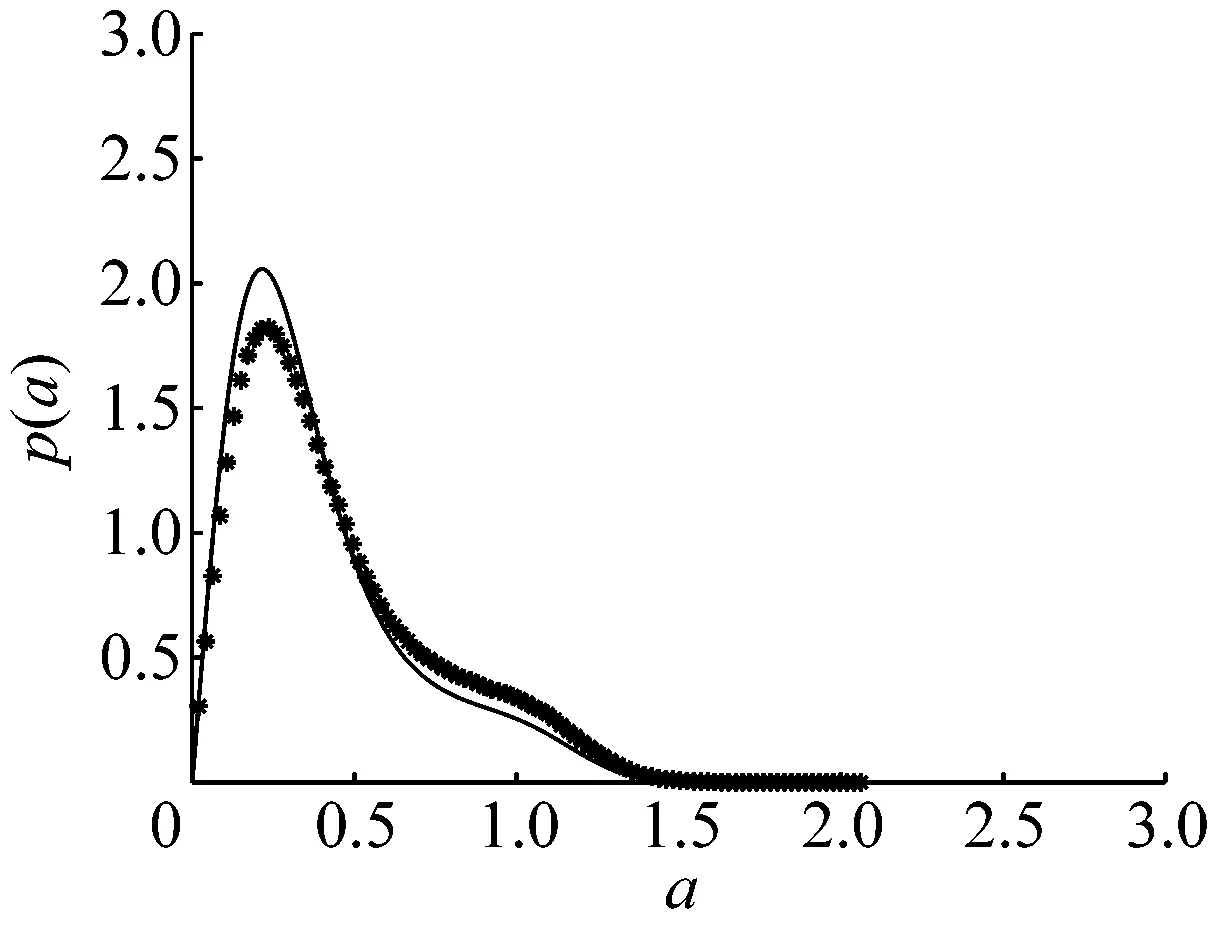
從圖5可知,當時滯τ=0.02時,穩態概率密度曲線存在三個峰,此時系統的穩態響應在零平衡點附近的振蕩、小幅值振蕩和大幅值振蕩這三種振蕩模式間切換,但小幅值振蕩的概率較大,且在零平衡點附近振蕩的概率稍大于大幅值振蕩的概率,這與圖3中無時滯反饋的情況略有區別;當時滯τ=0.08時,穩態概率密度曲線存在兩個峰,此時系統的穩態響應在零平衡點附近的振蕩、小幅值振蕩這兩種振蕩模式間切換,系統的大幅值振蕩消失,且此時在零平衡點附近振蕩的概率較大;當時滯τ=0.14時,穩態概率密度曲線僅存在一個峰,此時系統在零平衡點附近的振蕩較為顯著。
因此,從上述分析結果來看,噪聲強度D=0.01,反饋強度K=0.5時,穩態概率密度曲線的拓撲結構在時滯τ增加的過程中經歷了兩次轉變:三峰(平衡點處、小極限環處、大極限環處)→雙峰(小極限環、大極限環處)→單峰(平衡點處)。并且,隨著時滯τ的增加,系統的大幅值振蕩和小幅值振蕩受到了抑制。從隨機分岔的角度來看,時滯τ的改變誘導系統發生了兩次隨機P分岔,這也意味著該隨機系統的分岔行為可以通過時滯來調節。
3.2 反饋強度K對穩態概率密度的影響
取定時滯τ=0.1,探討反饋強度K對穩態概率密度的影響,根據式(13)可得噪聲強度D=0.01時穩態概率密度函數的極值點am隨反饋強度K的演化圖,如圖6所示,其中實線代表函數的極大值點、虛線代表函數的極小值點,星號為數值方法得到的概率密度分布的極大值點,圓圈為數值方法得到的概率密度分布的極小值點。可見當反饋強度K分別在區間[-1,-0.364)、[-0.364,-0.257)、[-0.257,0.226) 、[0.226,0.537)、[0.537,1]時,概率密度函數極值點的分布也有本質的區別。
圖7給出了不同反饋強度K下系統幅值的穩態概率密度曲線,其中實線為理論結果,星號為對原系統(1)進行Monte Carlo數值模擬的結果,兩者吻合較好。
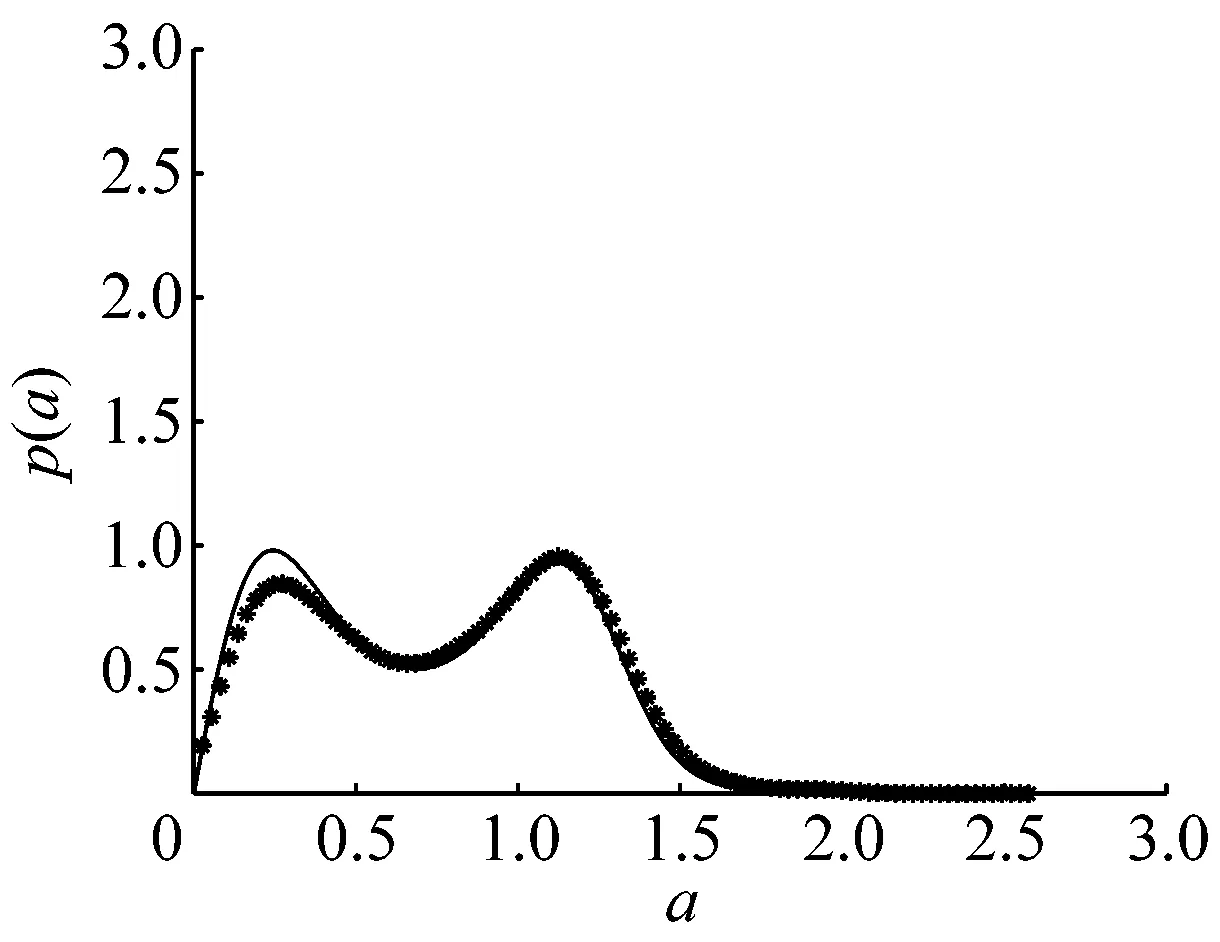
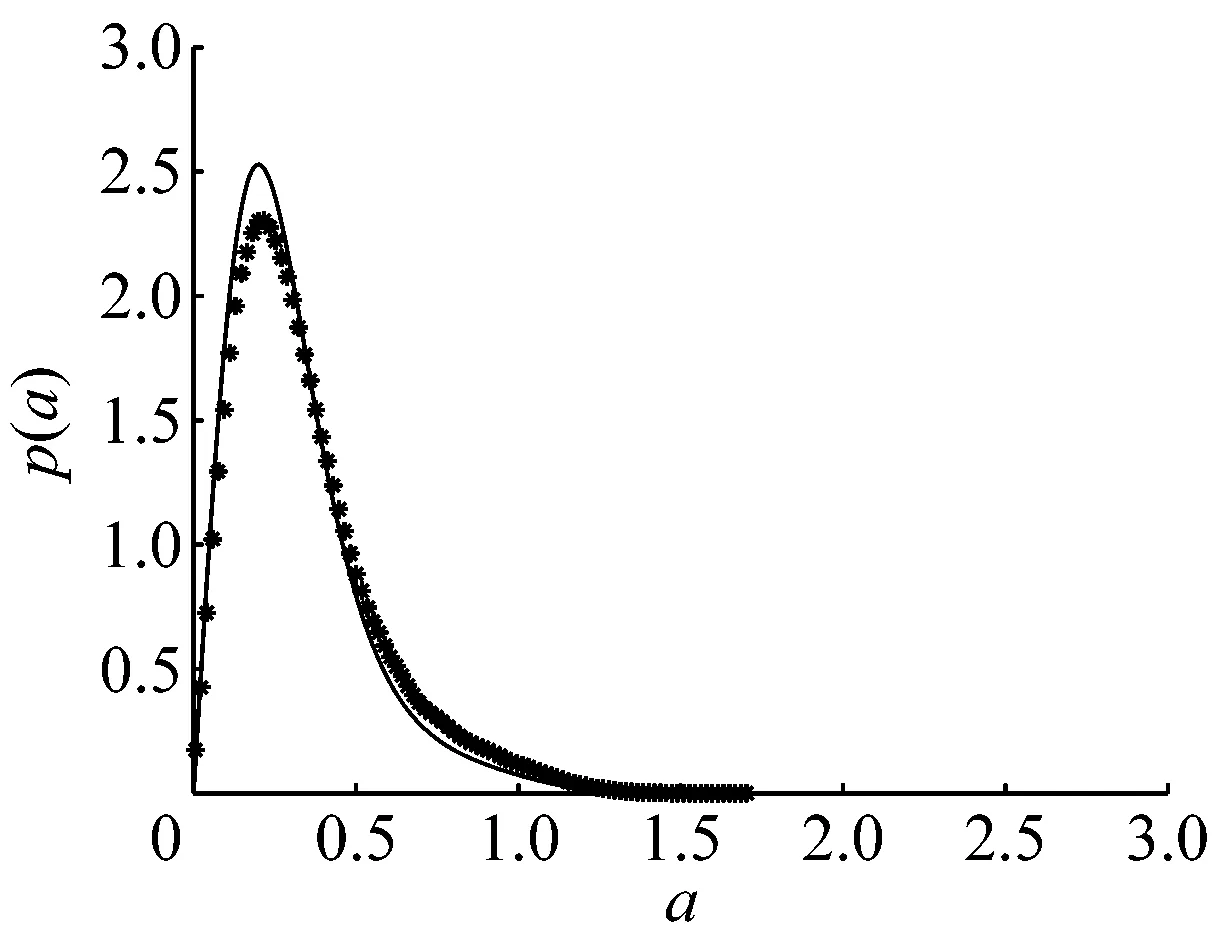
從圖7可知,當反饋強度K=-0.4時,穩態概率密度曲線存在一個峰,此時系統大幅值振蕩較為顯著;當反饋強度K=-0.3時,穩態概率密度曲線存在兩個峰,此時系統的穩態響應在小幅值振蕩與大幅值振蕩這兩種振蕩模式間切換,但大幅值振蕩的概率較大;當反饋強度K=0.04時,穩態概率密度曲線存在三個峰,此時系統的穩態響應在零平衡點附近的振蕩、小幅值振蕩和大幅值振蕩這三種振蕩模式中切換,但小幅值振蕩的概率較大;當反饋強度K=0.3時,穩態概率密度曲線存在兩個峰,此時系統在零平衡點附近的振蕩和小幅值振蕩這兩種振蕩模式間切換,并且在零平衡點附近振蕩的概率和小幅值振蕩的概率相近;當反饋強度K=1時,穩態概率密度曲線僅存在一個峰,此時系統在零平衡點附近的振蕩較為顯著,而小幅值振蕩和大幅值振蕩消失。
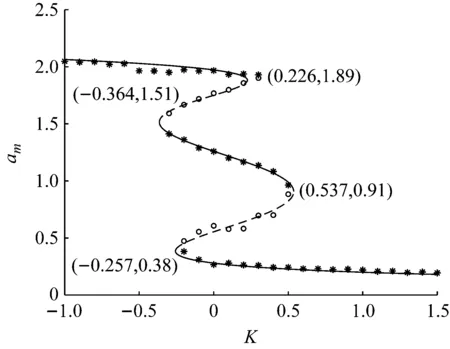
圖6 D=0.01時極值點am隨反饋強度K的演化
因此,從上述結果來看,當噪聲強度D=0.01,時滯τ=0.1時,穩態概率密度曲線的拓撲結構在反饋強度K增加的過程中經歷了四次轉變:單峰(大極限環處)→雙峰(小極限環處、大極限環處)→三峰(平衡點處、小極限環處、大極限環處)→雙峰(平衡點處、小極限環處)→單峰(平衡點處),這與3.1節中時滯(對系統穩態響應的影響機制有本質不同。同時,也不難發現,在反饋強度K不斷增加的過程中,大幅值振蕩受到了抑制,而在平衡點附近的振蕩得到了增強,這表明通過改變時滯反饋控制參數,可以使系統處于不同的振蕩模式中。此外,從隨機分岔的角度來看,反饋強度K的增加誘導系統發生了四次隨機P分岔,這意味著該隨機系統的分岔行為也可以通過反饋強度K來調節。
(a) K=-0.4
(b) K=-0.3

(c) K=0.04
(d) K=0.3
(e) K=1
3.3 時滯反饋控制參數設計
3.1節和3.2節分別探討了時滯和反饋強度對系統穩態概率密度的影響,相關結論可用于時滯反饋控制器的單參數設計,但仍未解決時滯τ和反饋強度K的雙參數設計問題,為此,需計算出導致幅值概率密度函數極值點數目發生變化的臨界參數集合,即(τ,K)參數平面內的轉遷集。
仍考慮噪聲強度D=0.01的情況,通過求解式(13)的正解個數在(τ,K)參數平面的分布就可以得到轉遷集,如圖8所示,參數平面被分成了三個區域,不同區域內的正根個數不同。當參數(τ,K)在區域1時,僅有一個極值點,函數曲線僅有一個峰。當參數(τ,K)在區域2時,幅值概率密度函數存在三個極值點,函數曲線有兩個峰。當參數(τ,K)在區域3時,幅值概率密度函數存在五個極值點,此時函數曲線有三個峰。從圖中還可以發現,當時滯(增大時,三峰及雙峰參數區域所對應的反饋強度K的范圍逐漸變小,而單峰參數區域所對應的反饋強度K的范圍逐漸變大。
從參數設計的角度看,選擇(τ,K)的不同組合,可使受控系統幅值的穩態概率密度曲線具有不同的拓撲結構,從而對隨機系統的穩態響應進行調控。此外,由于噪聲強度會對穩態概率密度產生影響,在選擇控制參數時,需要對不同噪聲強度的情況進行具體分析。因此,針對本文所給參數,圖8實際上解決了面向幅值概率密度調節的時滯反饋控制參數設計問題,更一般情況下的時滯反饋控制參數設計還有待進一步討論。
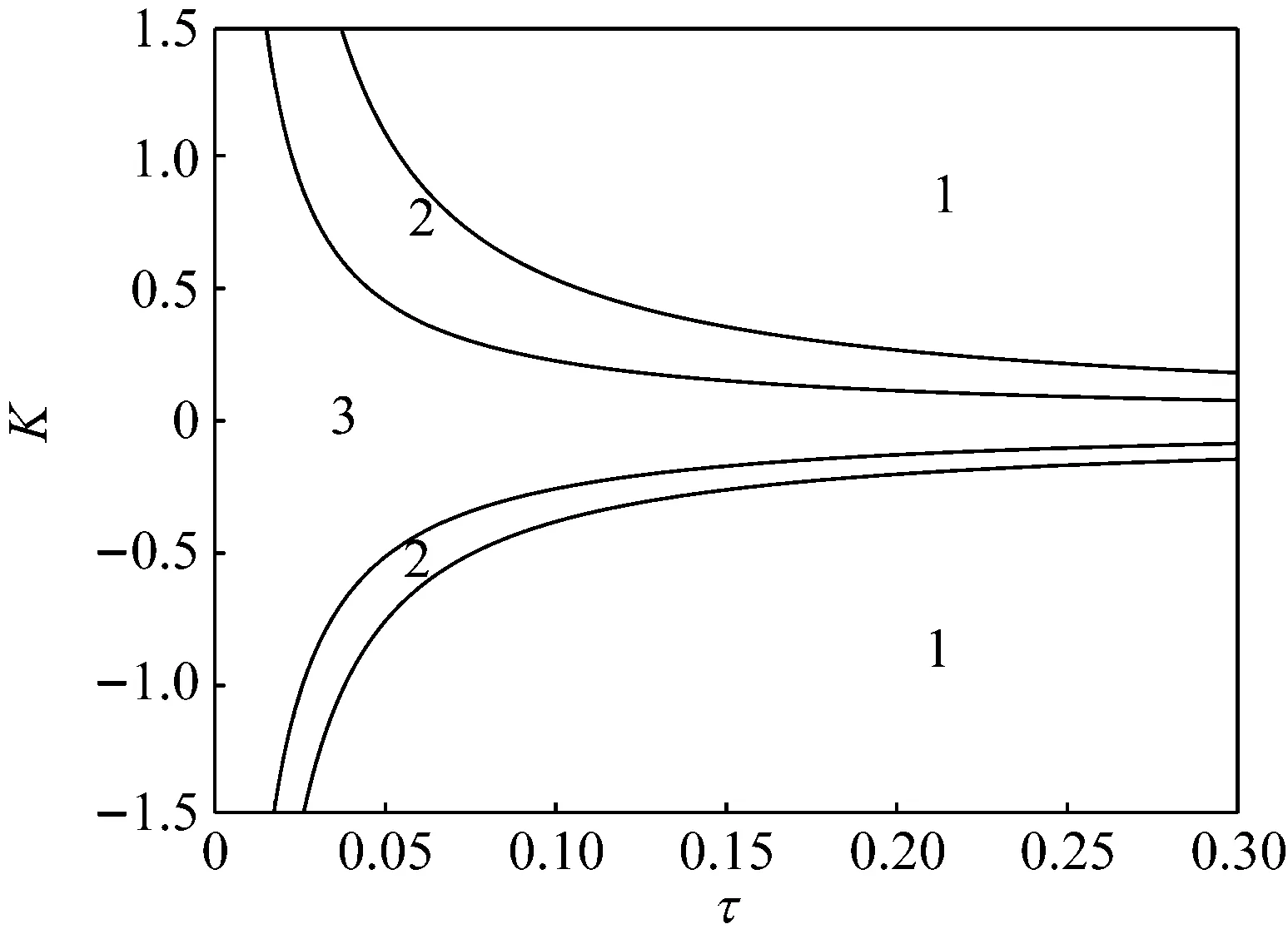
圖8 D=0.01時(τ,K)平面內的轉遷集
4 結 論
基于隨機平均法探討了時滯位移差分反饋對加性噪聲激勵下三穩態van der Pol系統穩態概率密度的影響,得到如下結論:
在小噪聲激勵的情況下反饋強度和時滯的變化均可以影響系統的穩態響應,但是兩者的影響機制有所不同。時滯的增大可以使穩態概率密度曲線從三峰過渡到單峰;而反饋強度的增大則會使系統穩態概率密度曲線的拓撲結構經歷四次轉變。
通過求解幅值概率密度函數極值點分布得到了時滯與反饋強度平面內的轉遷集,可直接用于時滯反饋控制的參數設計,更一般情況下的參數設計有待進一步分析。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32