利用空間異質性的遙感分類結果精度評價方法
2021-01-20 10:37:44王振華徐利智紀晴劉智翔
遙感信息 2020年6期
王振華,徐利智,紀晴,劉智翔
(上海海洋大學 信息學院,上海 201306)
0 引言
遙感影像分類結果的精度評價是遙感影像數據應用決策的重要保障[1]。面向遙感影像分類結果的精度評價方法是一個亟待解決的科學問題。
抽樣是產品質量評估和數據精度評價的常用方法之一,是處理大批量信息的有效方法。抽樣是按預先確定的方案,從批或過程中隨機選取樣本,逐一檢查樣本質量,從而對批或過程做出判定,是介于不檢驗與百分比檢驗之間的一種檢驗方法[2]。常用的抽樣檢驗方法包括簡單隨機抽樣[3]、系統抽樣[4]、簇抽樣[5]、分層抽樣[5]和整群抽樣[6]等。這些抽樣方法大多是針對獨立同質產品的精度評價。而區別于獨立同質的產品,遙感影像數據具有空間相關性和異質性等特征。因此,直接應用現有的抽樣方法對其進行精度評價,存在樣本信息冗余度高和代表性弱等局限性。
兼顧遙感影像特性,亦有學者提出了遙感影像分類結果的精度評價,如基于空間數據的相關性,Huang等[7]利用灰度共生矩陣量化遙感像元間的關系,優化了系統抽樣方法用于遙感分類結果精度評價;馬煒等[8]根據系統抽樣的原理,結合精度要求提出基于網格空間抽樣調查的濕地面積估測方法;Wang等[9]結合分層標準的選擇和抽樣單位大小,制定了作物面積估算空間抽樣方案;林芳芳[10]基于GF-1號遙感影像,綜合應用遙感技術、抽樣技術、模擬退火算法及空間自相關理論等,對研究區農作物種植面積進行抽樣估算。上述研究利用遙感影像的空間相關性改進了現有的抽樣方法,提高了遙感影像分類結果的精度評價效率。而遙感影像的空間異質性特征亦影響著抽樣精度評價方法的設計與實現。
空間異質性是不同地表覆蓋類型斑塊的空間分布關系以及空間分布變異程度,是影響空間地理數據研究的一個重要因素[11]。景觀格局指數是量化遙感影像數據的空間異質性的方法之一。景觀格局一般指景觀的空間格局,既是大小和形狀各異的景觀要素在空間上的排列和組合,又是景觀異質性的具體體現,也是各種生態過程在不同尺度上作用的結果[12]。景觀格局指數包括斑塊密度、聚集度指數、香農多樣性指數、蔓延度指數、分裂度指數等[13]。
本文基于景觀格局聚集度指數量化遙感影像的空間異質性,提出了一種利用空間異質性的遙感影像分類結果空間抽樣精度評價方法。
1 遙感影像分類結果的精度評價方法
圖1給出了利用空間異質性的遙感影像分類結果空間抽樣精度評價方法流程圖。該方法包括3部分內容:1)利用景觀聚集度指數量化遙感影像的空間異質性,實現研究區域空間區劃;2)基于聚集度指數推導各區劃空間的權重系數,并分配各區劃空間的樣本量;3)在各區劃空間內選擇樣本點,并通過與參考數據比較,對各區劃空間進行精度評價,從而實現整個區域的遙感影像分類結果精度評價。
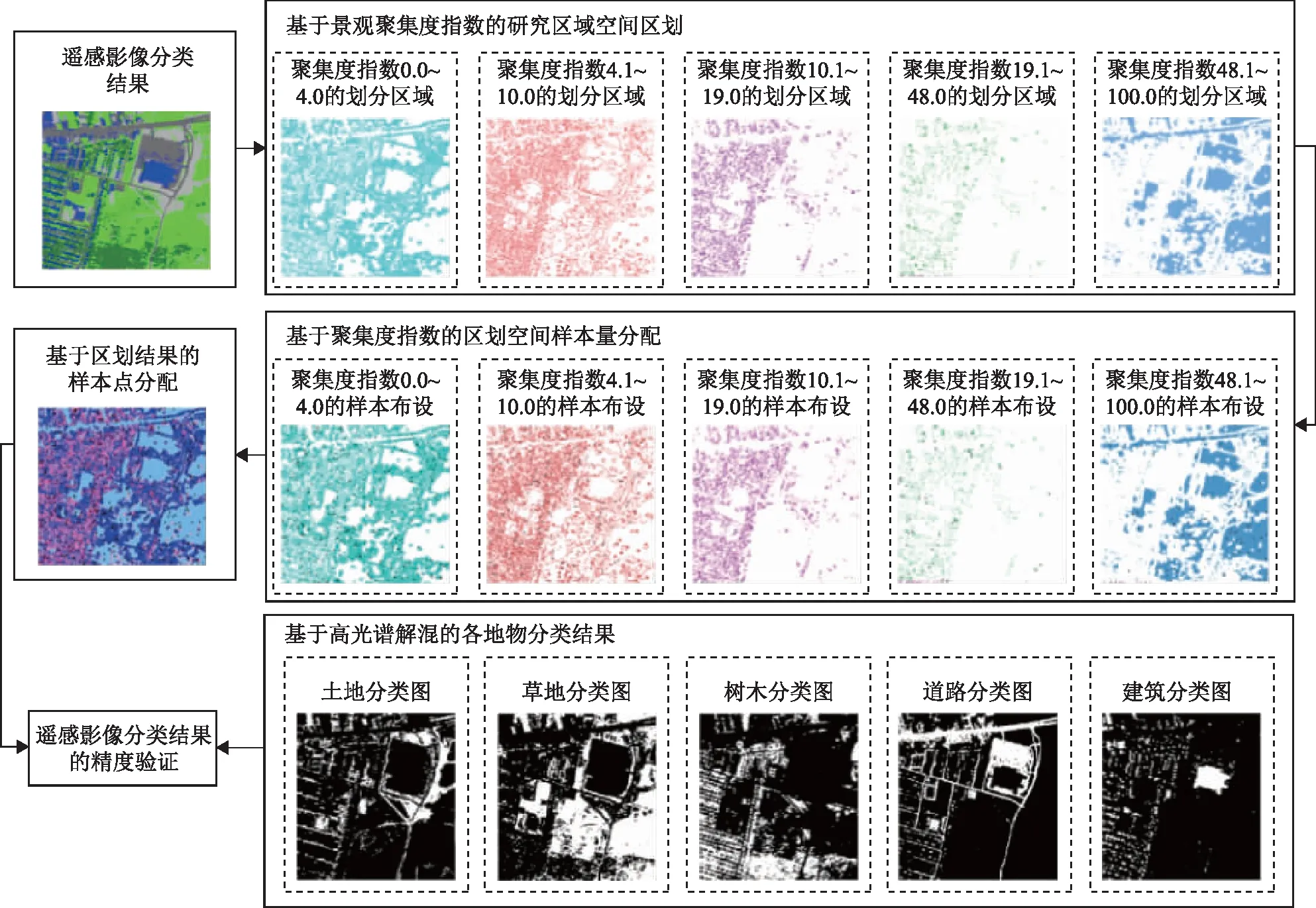
圖1 利用空間異質性的空間抽樣精度評價方法流程圖
1.1 基于景觀聚集度指數的研究區域空間區劃
本文引入景觀聚集度指數(aggregation index,AI)量化遙感影像的空間異質性,計算方法如式(1)、式(2)所示[14]。
(1)
(2)
式中:n為景觀中斑塊類型總數,例如以5×5為滑動窗口,n的取值為5;Pij為斑塊類型i與j相鄰的概率;Pi為景觀類型i所占景觀的比例;Pj/i為在給定斑塊類型i的情況下,斑塊類型j與其相鄰的條件概率;mij為景觀柵格網中斑塊i和j相鄰的邊數;mi為斑塊類型i的總邊數。
景觀聚集度指數描述景觀中斑塊的聚集程度,反映景觀要素在景觀中的分散性,是一類能夠描述不同景觀斑塊的團聚程度的指數。當mij越大,即該計算窗口的地物類型越多,則Pj/i隨之增大,Pij反而越小。已知ln(Pij)是一個單調遞增函數,因此此時AI隨著mij的增加而減小。若該景觀是由許多離散的小斑塊組成,則其聚集度指數就低。
1.2 各區劃空間內精度評價樣本點選擇
根據遙感影像分類結果的精度要求和允許誤差,推導用于空間抽樣精度評價的樣本量,如式(3)所示。
(3)
式中:m為用于空間抽樣精度評價的樣本量;Z為標準正態分布統計量;P表示期望精度,即遙感影像分類結果的精度要求;E表示允許誤差;N表示樣本總體[16]。
由各區域的面積計算面積比,并根據該面積比和聚集度指數分配樣本量。原則是聚集度高的區域,其像元低概率入樣;聚集度低的區域,其像元高概率入樣。
2 實證分析
2.1 實驗數據
待精度評價的實驗數據選取美國德克薩斯州科波阿斯科夫的市區遙感影像數據,拍攝時間為2015年4月16日,位置為97°54′W,31°03′N,分辨率為2 m,傳感器是超光譜數字圖像收集實驗儀器 (hyperspectral digital imagery collection experiment,HYDICE)。圖2為遙感影像波段53、波段35、波段10合成的圖像,大小為302像素×302像素。

圖2 實驗數據
用于精度評價的參考數據選取同區域的5類地物分類圖作為驗證數據,該驗證數據通過結構化的稀疏正則化非負矩陣分解(structured sparse regularized nonnegative matrix factorization,SS-NMF)方法對高光譜解混后獲得[17],如圖3所示。
所有數據均采用WGS_1984_UTM_zone_50N坐標系;數據均來源于:http://www.escience.cn/people/feiyunZHU/Dataset_GT.html.
基于支持向量機(support vector machine,SVM)分類方法將實驗數據分為5類地物,分別為道路、草地、樹木、建筑和土地。各類地物面積占比分別為18.01%、39.41%、17.24%、11.92%和13.42%。圖4為待精度評價的遙感影像分類結果。
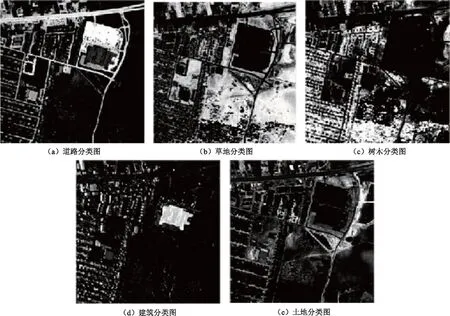
圖3 精度評價參考數據
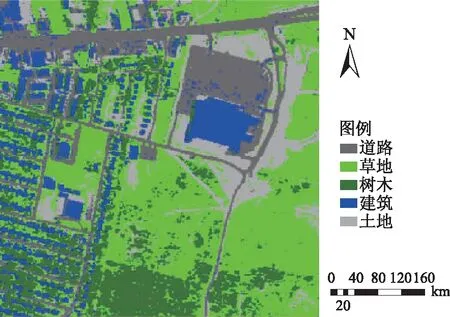
圖4 待精度評價的遙感影像分類結果
以像元為評價單元,本文待精度評價的遙感影像分類結果的樣本總量N為91 204。以精度要求為85%、允許誤差為1%,根據公式(1)、公式(2),計算得出用于精度評價的樣本量為813。
2.2 基于聚集度指數的研究區域劃分
根據公式(3),計算研究區域的聚集度指數。采用自然斷點分級法對聚集度指數進行劃分,指定類的數目為5。“自然間斷點”[15]類別基于數據中固有的自然分組,對分類間隔加以識別,根據相似值進行分組,使各個類之間的差異最大。圖5為聚集度指數頻率直方圖。圖6為實驗區域的聚集度指數分布。
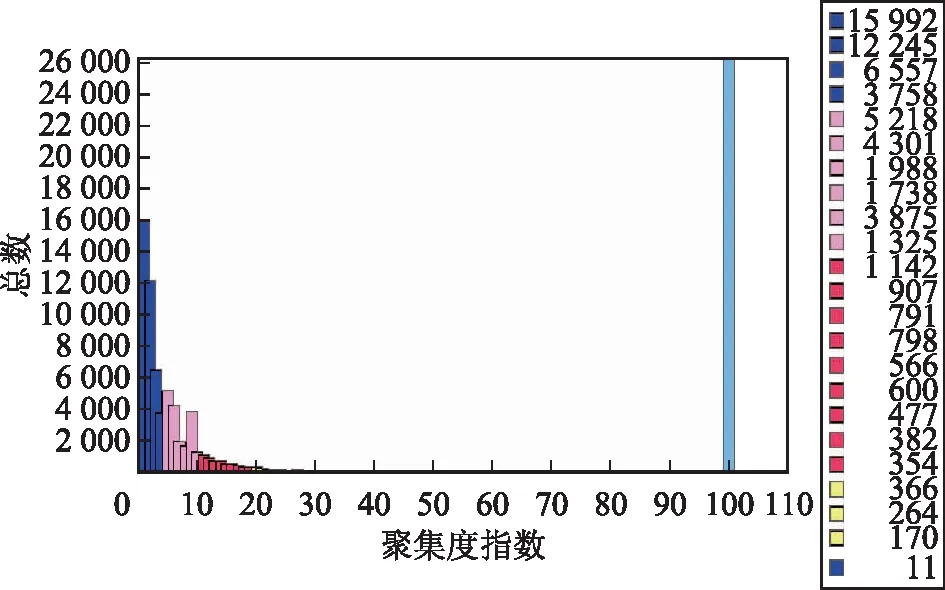
圖5 聚集度指數頻率直方圖
2.3 各區域的樣本點分配及選擇
基于聚集度指數劃分的各空間區域所占面積如表1所示。
為保證樣本的代表性,在聚集度指數高的區域的像元具有高概率入樣,聚集度指數低的區域的像元具有低概率入樣。樣本點分配權重有各區劃空間的面積占比和聚集度指數確定,分別為50%、25%、10%、5%、10%,則樣本量分別為407、203、81、41、81。
在各區劃空間內分別隨機抽取樣本點,圖7(a)~圖7(e)分別為各區域樣本點空間布樣結果。
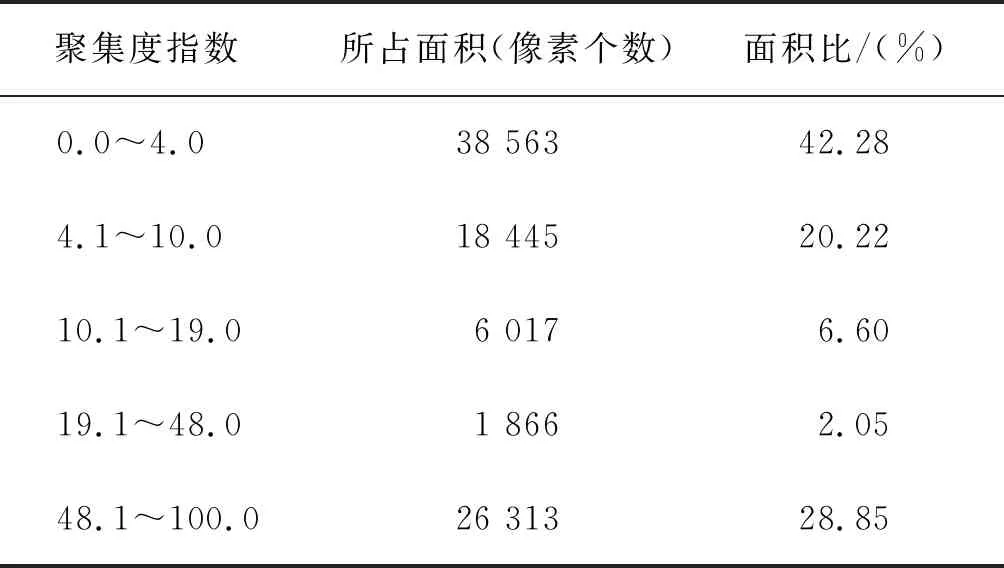
表1 各區劃空間面積分布
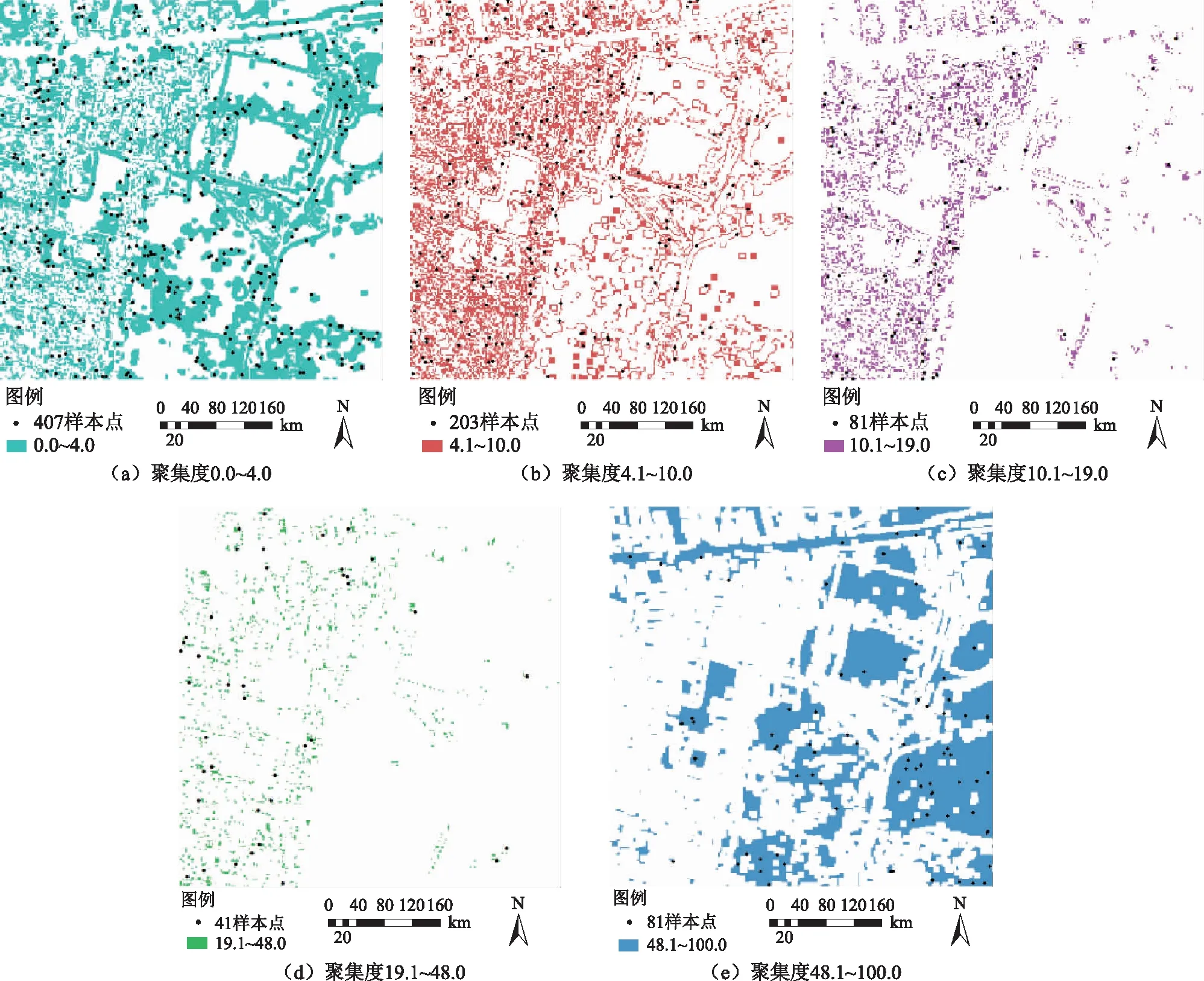
圖7 基于聚集度指數的樣本點布設圖和樣本點選擇
3 結果分析和比較
為驗證本文提出的利用空間異質性的遙感影像分類結果空間抽樣精度評價方法的可行性,將本文方法與簡單隨機抽樣、分層抽樣和基于灰度共生矩陣的系統抽樣等抽樣精度評價方法進行比較;將遙感影像分類結果的全檢作為真值,對本文方法的精度進行評價。
3.1 不同抽樣精度評價方法的樣本點選擇
圖8為基于不同抽樣方法的精度評價樣本點空間選擇。可以看出:1)基于簡單隨機抽樣的精度評價樣本點分布隨機性較強,樣本缺乏代表性,精度評價結果存在不確定性;2)基于分層抽樣的精度評價樣本點更多分布在大面積的地物上,樣本點信息存在冗余性且缺乏代表性;3)基于灰度共生矩陣的系統抽樣精度評價樣本點以等間隔的形式分布,但小面積地物或稀有地物的入樣概率低甚至存在不入樣的現象;4)本文提出的精度評價方法,用于精度評價的樣本點多分配在聚集度低的區域,即地物類型復雜區域的像元高概率入樣,而大面積同質區域的像元低概率入樣。結果表明,本文方法克服了簡單隨機抽樣的不確定性;與其他方法相比,降低了樣本點的信息冗余度,提高了樣本點的代表性。
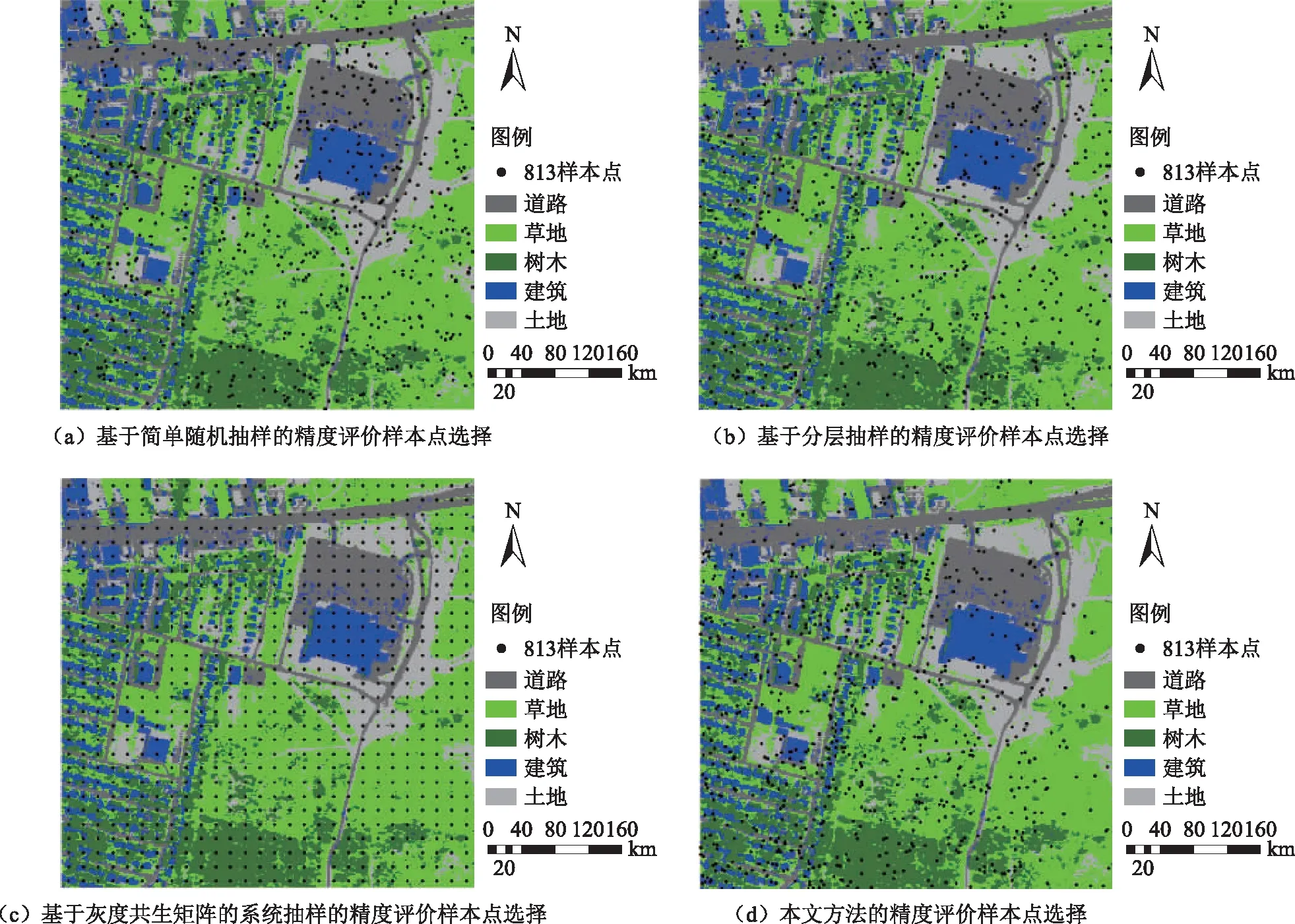
圖8 不同抽樣方法的精度評價樣本點空間選擇
3.2 精度評價
以像元為單位,對遙感影像分類結果進行了全檢(full inspection,FI),表2給出了基于全檢[18]的精度評價混淆矩陣。
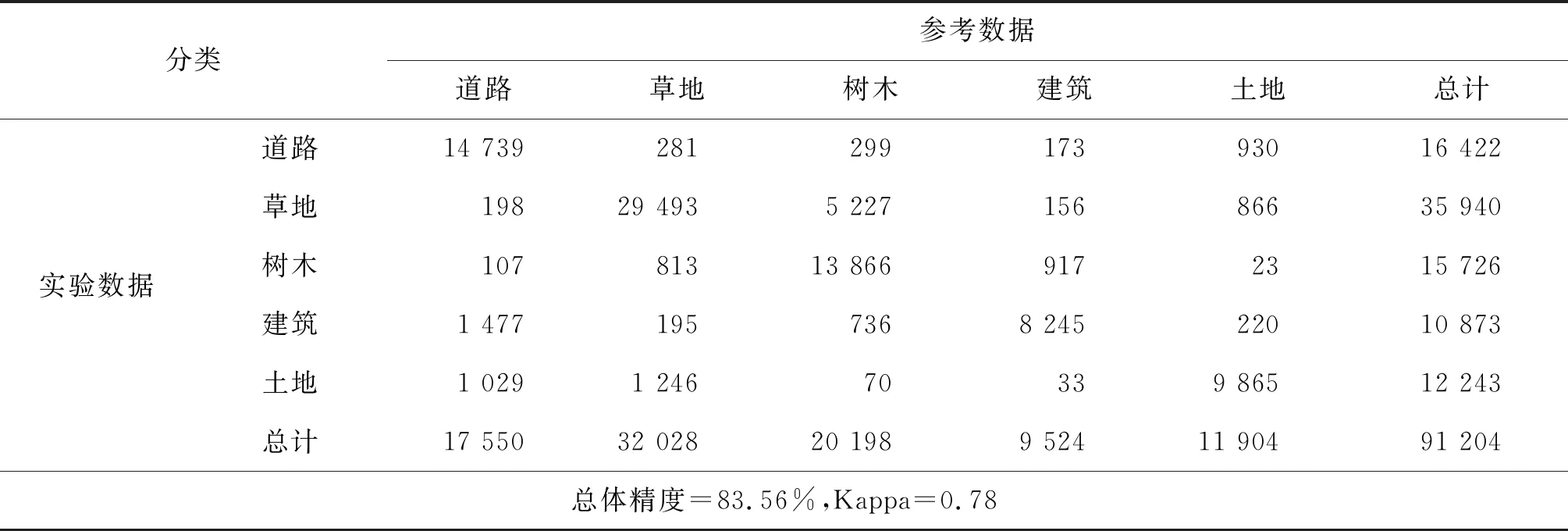
表2 基于全檢的精度評價混淆矩陣
采用簡單隨機抽樣、分層抽樣、基于灰度共生矩陣系統抽樣和本文方法分別對遙感影像分類結果進行精度評價。圖9給出了基于不同抽樣方法的精度評價結果。
由圖9可看出,本文方法的總體精度和Kappa系數均低于其他方法。這是因為該空間抽樣精度評
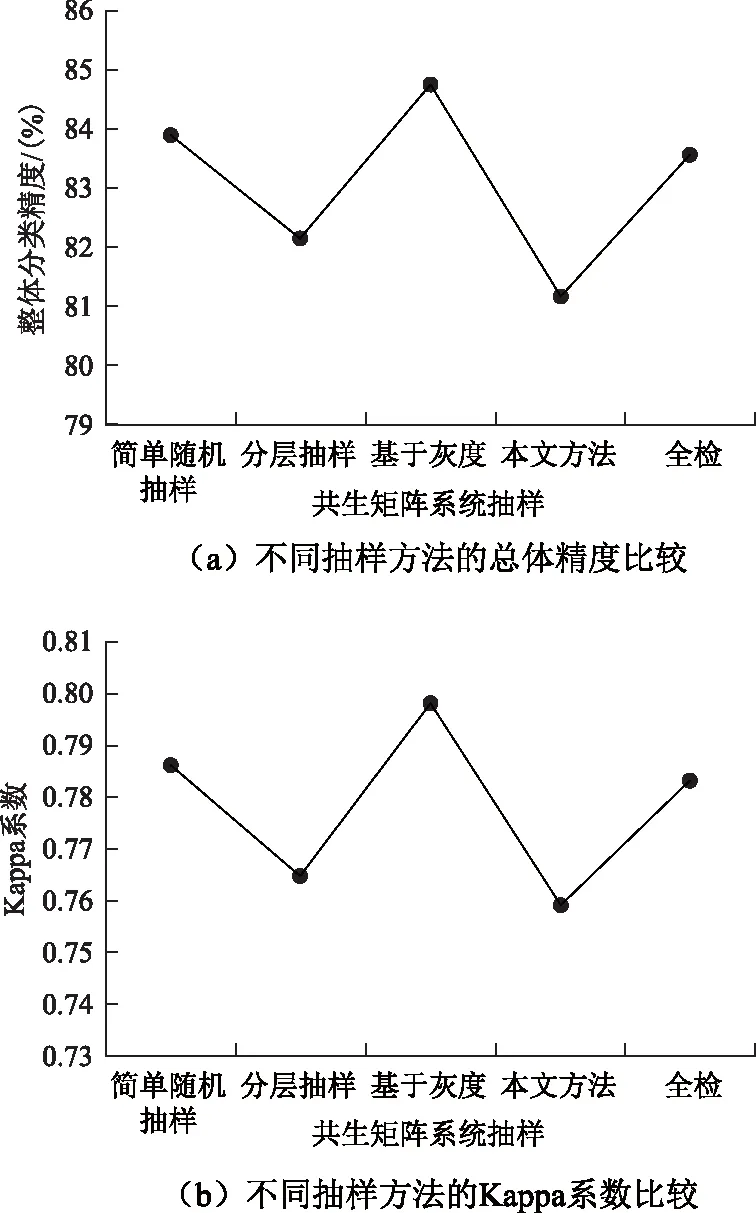
圖9 不同抽樣方法的精度評價結果
價方法的樣本點多選擇在地物聚集度指數低的區域,即其地物類型復雜區域,該區域在分類中易產生混分、誤分等。實驗結果表明,本文提出方法對遙感影像分類結果具有較高的精度要求,較適合于精度要求高的遙感影像分類結果的精度評價。
4 結束語
本文引入遙感影像的空間異質性,提出了一種利用空間異質性的遙感影像分類結果空間抽樣精度評價方法。該方法通過計算遙感影像的聚集度指數將研究區域劃分為不同的空間區域,并設置不同區域的權重系數;根據不同聚集度指數在各區域選擇用于精度評價的樣本點,保證了聚集度指數低的區域(地物類型復雜區域)像元高概率入樣,聚集度指數高的區域(地物類型簡單的區域)像元低概率入樣。
通過與傳統的抽樣方法比較,表明本文提出的方法降低了樣本的信息冗余度,提高了樣本的代表性;同時,本文方法滿足待評價的遙感影像分類結果的較高精度要求,較適合于精度要求高的遙感影像分類結果的精度評價。
猜你喜歡
現代裝飾(2021年6期)2021-12-31 05:27:54
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52