基于神經網絡的疲勞駕駛識別系統
2021-01-25 01:40:10王艷玲
汽車實用技術 2021年1期
王艷玲
(長安大學汽車學院,陜西 西安 710064)
前言
預防疲勞駕駛及檢測方面有很多方法,一般通過圖像分析對駕駛員臉部與眼睛特征進行疲勞評估,并采集駕駛員的生物行為信息,如心電、腦電等推斷駕駛員的疲勞狀態,或分析駕駛員轉動方向盤、踩剎車等行為特征,判別駕駛員是否疲勞,但這些檢測方法都存在問題。通過 BP神經網絡針對疲勞參數進行深度分析,提取相應參數,運用Matlab進行數據處理,對駕駛過程進行實時監控,及時預警。
1 駕駛疲勞識別系統
車內安裝眼動儀,計算并記錄眼瞼閉合比例,判斷駕駛員疲勞等級。車內安裝各種傳感器,通過平臺采集到所需的車輛數據,由計算機處理。
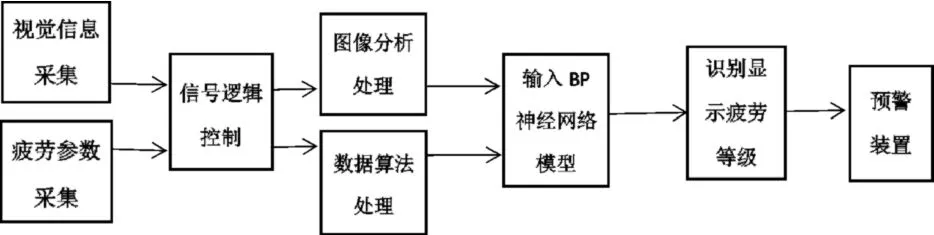
圖1 疲勞識別流程圖
記錄駕駛員各項駕駛行為參數,直至駕駛員重度疲勞狀態,記錄駕駛員不同疲勞程度下的駕駛行為參數,劃分疲勞等級,駕駛疲勞的等級標準不同,當駕駛參數達到某一標準或者參數在某一范圍內波動,或此參數以及標準差呈現相應的疲勞駕駛變化趨勢,則神經網絡接收此參數劃分到相應的疲勞等級下,進行下一時間段的預測,并及時地進行預警提示。
2 基于BP神經網絡的疲勞識別
建立BP神經網絡,對駕駛員的疲勞參數進行深度分析,研究駕駛人行為特征,進一步分析駕駛人的疲勞等級,掌握不同疲勞水平下駕駛行為變化特征,并在人眼信息及駕駛行為特征的基礎上進行疲勞判斷,針對疲勞算法原理進行疲勞識別,提取相應的特征參數作為輸入,疲勞程度作為輸出,建立識別模型。
2.1 神經網絡模型
構建BP神經網絡模型,通過大量的試驗獲得樣本數據,選取不同駕齡的駕駛員,在模擬駕駛器的操作平臺進行數據參數收集試驗,得到疲勞參數數據樣本作為輸入數據,用處理后后的樣本集訓練網絡,得到下一時間段預測的數據,進而評判數據屬于疲勞駕駛的哪一等級,輸出等級,進行疲勞識別[1]。
2.2 疲勞參數選取
確定與駕駛疲勞相關的駕駛行為,采集能夠通過傳感器提取的疲勞參數。包括車速傳感器,方向盤轉角傳感器,減速傳感器等。通過疲勞算法計算 f,確定駕駛員疲勞程度,研究不同疲勞程度下的駕駛行為特征[2]。我們以五秒作為數據處理間隔時間,輸入參數與疲勞等級參數對比,輸出預測,進行預警。我們僅研究參數為f、方向盤轉角SA、方向盤轉角速度SW、車速V、時間T。
2.3 數據處理
2.3.1 疲勞程度判斷方法
在通過相應的車載預警儀器或者眼動儀捕捉臉部圖像,進一步進行人眼識別,提取對應信息,利用圖像幀數百分比也可來表示PERCLOS值f[3]。
公式所示:

其中:N為固定時間內所采集的視頻圖像有效頓數,K為眼睛處于閉合大于狀態的幀數。
2.3.2 方向盤轉角數據處理
方向盤轉角的變化影響駕駛員的操作穩定性。當方向盤轉角開始出現某一時間段的參數恒定時,開始出現駕駛員疲勞,此間隔較短暫,并且少量出現。但當轉角出現長時間的持續不動時,并且轉角不變出現多次,則駕駛員可能處在非常疲勞的狀態下[4]。由于設置時間五秒為計算數據更新時間,也就是當超過五秒轉角不變則中度疲勞,若多個時間大于五秒甚至十秒轉角參數不變,則疲勞程度加深。判斷轉角持續不斷的話,輸入的參數進行處理。

識別中度疲勞,時間間隔為5秒。

識別重度疲勞,時間間隔為10秒。
2.3.3 方向盤角速度數據處理
方向盤角速度影響車輛行駛的橫向穩定性,也反映疲勞水平。當駕駛員處在疲勞狀態時,會減少對方向盤的修正,方向盤轉角速度幅值增加,駕駛員對車輛的控制穩定性減弱,會出現大幅修正;駕駛員疲勞程度繼續增加,操作穩定性變弱[5]。
角速度公式:

其中:SA(i)為轉角幅值。
清醒狀態下,方向盤角速度大致在-50°/s~50°/s。當方向盤角速度在某一時刻的輸入參數大于50時,開始出現駕駛員疲勞狀態,所以當方向盤角速度即當輸入數據在[50,60]范圍內,識別中度疲勞,當輸入數據在[60,100]范圍內,識別重度疲勞。
2.3.4 加速度數據處理
加速度反映車速變化程度,體現駕駛員對車輛控制能力。
加速度計算公式:

其中:Vi為車速,Ai為加速度
隨著疲勞程度的增加,加速度變化幅度逐漸變小,頻率變高。判斷不同等級下的參數特征,利用多項式擬合函數實現,求輸入的加速度參數的斜率。
調用格式P=polyfit(T,Ai,1),當P介于P<-1或P>1之間,則正常狀態;當P介于[-1,1]之間,且出現為0時,則中度疲勞狀態;當P介于[-0.5,0.5]之間,且基本為0,則重度疲勞狀態。
對參數進行處理,對數據進行量化級的轉化,在[0,10]范圍內,減少預處理的工作量。
2.4 BP神經網絡結構
確定影響因素,提取出疲勞特征參數,輸入層5個節點,分別代表數據f、△SAi、△SWi、Ai、T;中間隱藏層進行數據處理,該層節點數為5;最后輸出疲勞等級,有3個節點,代表清醒、中度、重度疲勞,就代表了下一時間段的疲勞識別[6]。
3 結論
通過平臺試驗,找到影響駕駛員疲勞駕駛的因素,確定疲勞駕駛行為特征參數,結合眼部特征參數判斷駕駛疲勞的等級的影響參數,從而確定特征值的輸入,并利用Matlab進行數據預處理,使輸入數據更加精確。訓練神經網絡,進而預測下一時間段的參數變化范圍,設置疲勞等級,識別參數的變化范圍,最后輸出疲勞等級,進行相應的駕駛提示,達到提前預警的效果,提高駕駛安全性。
但是駕駛員的駕駛行為存在差異,導致駕駛參數呈現多樣性,復雜性,疲勞等級的劃分也存在差異,鑒于此,可以建立不同影響因素下的基于 BP神經網絡的疲勞駕駛模型,進而優化模型,提高精確度,并對輸入參數的處理也可以通過最小二乘法進行精確處理。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
心理學報(2022年4期)2022-04-12 07:38:02
汽車實用技術(2022年4期)2022-03-07 06:07:20
水泵技術(2021年3期)2021-08-14 02:09:20
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
當代化工研究(2016年9期)2016-03-20 16:22:13
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
測繪科學與工程(2013年3期)2013-03-11 15:07:36