基于北斗導航技術的無人機“蜂群”系統
2021-01-28 10:40:57李諭秦澤
錦繡·下旬刊 2021年6期
李諭 秦澤
摘 要:該系統利用北斗定位技術與實時導航技術和多無人機協同控制系統,將北斗系統與無人機相結合,有效增強了無人機“蜂群”的定位,避障與信息的實時傳輸。使得無人機可以在復雜環境下有著敏銳的反應和應對能力,“蜂群”還可以化整為零,同時執行多個類型不同的任務,提高了任務的執行率和成功率。該系統可將無人機的協同作戰能力發揮的更加高效,無人機蜂群協同控制與自主避障技術主要需解決兩個及以上無人機的編隊構型控制和自主避障的問題,應用北斗的定位技術和導航技術自主實現蜂群無人機各成員間導航與控制,能讓無人機蜂群成為一個整體并且更好的執行上層系統分配的任務。
關鍵詞:北斗定位技術;北斗信息傳輸技術;北斗導航系統;多旋翼飛行器系統;多無人機協同系統
引言
近幾年單無人機作戰已經不能很好的適應日益變化的作戰模式與作戰環境,應從單無人機覆蓋式打擊轉型至多無人機的精確式打擊,此外多無人機協同作戰降低了單無人機易被攔截的風險,并可同時對多個目標進行打擊,提高了作戰效率。一旦該系統能夠實現,必將大大提高我國空軍的空地打擊能力和制空能力。
系統組成及功能
該系統的核心技術是北斗定位技術、北斗信息傳輸技術、北斗導航技術和多無人機協同系統。因上述系統均有獨立體系此處不做過多介紹,著重敘述諸多系統的融合與協同應用。
無人機蜂群協同控制與自主避障技術主要需解決兩個及以上無人機的編隊構型控制和自主避障的問題,應用北斗的定位技術和導航技術自主實現蜂群無人機各成員間導航與控制,能讓無人機蜂群成為一個整體并且更好的執行上層系統分配的任務。
無人機蜂群協同控制與自主避障技術的特點包括以下幾點:
·只需要簡單指令就可以操控蜂群
·蜂群可以自主躲避障礙物
·蜂群成員之間不會發生碰撞
·蜂群可以在需要時分成多個小組同時執行不同任務
·蜂群成員只需要具備周邊通訊功能
·可統一蜂群的大體運動
·蜂群不需要領航者,所以魯棒性強
·系統算法可以應用于任意數量無人機成員
·可根據需要應用于二維平面編隊和三維立體編隊
該技術包括以下三個核心功能:蜂群構型控制、蜂群自主避障、蜂群任務分配。
◆ 無人機蜂群編隊構型控制
無人機蜂群編隊構型控制算法以圖論為理論基礎,以編隊成員趨近、同速、避撞為基本原則,以北斗的實時通訊技術為通訊方式來實現編隊構型的一致性控制。編隊構型控制共有以下兩種:固定構型編隊;空間自由編隊。
固定構型編隊
當無人機成員數量較少時,一般選擇固定構型編隊,包括:線型構型(一字構型);人字形構型;三角形構型;鉆石型等。此外,可以根據需求進行任意編隊構型的定制開發。
空間自由編隊
空間自由編隊模式下,無人機各成員間的相對位置可以根據指定的勢函數進行確定,穩定編隊構型形成后,成員間以二維空間編隊或三維空間編隊為基本單元組成整體。在該模式下,編隊成員間的通信拓撲應是動態變化的,無人機只需對其周圍一定范圍內的成員具有通信能力,并不需要全局通信能力,因此具有很強的適應性。
◆ 無人機蜂群自主避障
無人機蜂群自主避障功能可以實現蜂群整體對各類動靜態障礙的規避,蜂群通過運行指令控制實現蜂群整體運動趨勢的改變,如控制蜂群按指定航路點飛低目的地,并在飛行過程中蜂群能夠根據北斗導航提供的實時導航數據規避障礙區域或敵方單位。無人機蜂群自主避障基于勢函數方法進行設計,蜂群通常不進行顯式的航路規劃,而是將障礙區域/敵方單位設置為斥力源,當蜂群靠近斥力源時將生成偏離指令,制導蜂群避障。
◆ 無人機蜂群任務分配
無人機蜂群可以分成若干小蜂群去執行不同的任務。不同的任務可以由數量不等的小蜂群執行,小蜂群中成員數量可以根據任務的類型和難易程度自動進行分配。此外,蜂群不同成員具有獨立的功能,每個任務需要具有不同功能的成員機一同協作完成。
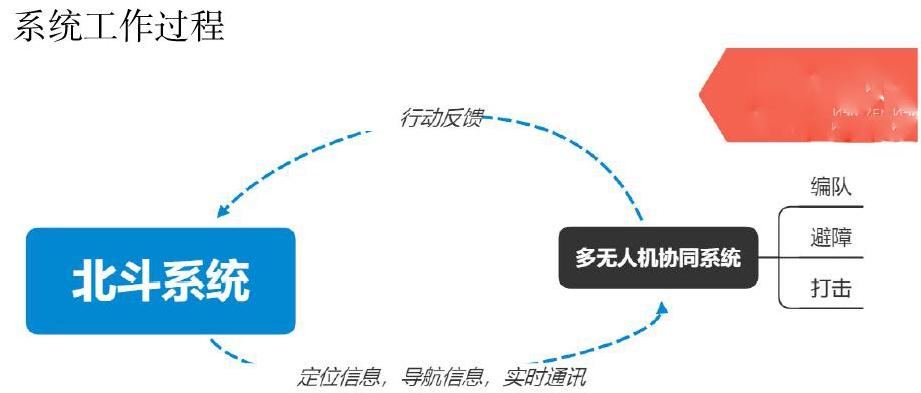
系統工作過程
系統特點
(1)覆蓋面廣
北斗衛星導航系統目前有39顆在軌衛星,可以為整個亞太地區提供服務,2020年將再發射2-4顆衛星從而可以實現為全球提供服務。
(2)定位精度高
空間信號精度將優于0.5米;全球定位精度將優于10米,測速精度優于0.2米/秒,授時精度優于20納秒;亞太地區定位精度將優于5米,測速精度優于0.1米/秒,授時精度優于10納秒
(3)不易于攔截
無人機蜂群在執行任務時多為群體作戰,而現有防空系統也很難在高密度的無人機攻擊下對無人機集群進行攔截。并且現在微型無人機也比較普及,此類無人機可以利用3D打印技術進行制造,3D打印技術和新型復合式材料的應用可以大大降低被防空系統攔截的可能。
(4)低耗高效
無人機蜂群化作戰所需的無人機及經濟又小巧,在保證戰斗力的同時又節約了經濟成本,由于蜂群化作戰具有數量上的優勢,所以在執行任務的效率也很高,另外還可以執行高密度、高負荷的任務。
參考文獻
[1]microsoft-edge:http://www.52rd.com/Blog/Detail_RD.Blog_hirain_88434.html
[2] 《多無人機自主協同控制理論與方法》是2012年1月國防工業出版社
[3]http://www.beidou.gov.cn/
(長春大學)
