計及導向擺臂約束的重型貨車駕駛室俯仰平面動力學模型*
2021-02-02 08:13:50趙雷雷于曰偉周長城黃德惠
汽車工程 2021年1期
趙雷雷,于曰偉,周長城,黃德惠,袁 建
(1.山東理工大學交通與車輛工程學院,淄博 255000;2.一汽解放青島汽車有限公司研發部,青島 266043)
前言
重型貨車駕駛室懸置系統影響著駕駛員的舒適性和健康[1-2]。該系統的優化設計、特性分析及控制是一項非常復雜的工作[3],這主要是由駕駛室振動的復雜性決定的[4-6]。目前,大多數重型貨車的駕駛室都裝有擺臂導向機構,以抑制其俯仰運動。在車輛行駛過程中駕駛室的振動響應與駕駛室懸置導向機構的約束特性直接相關。也即,由于導向機構的約束作用使得駕駛室各向振動相互耦合。
借助駕駛室系統動力學模型,把握系統振動特性,對懸置參數設計與調控和舒適性的提升等非常重要。盡管可在考慮上述耦合的情況下建立復雜三維駕駛室動力學模型,但駕駛室平面動力學模型在某些應用中效率更高[7]。其中,駕駛室俯仰平面動力學模型對駕駛室懸置系統設計與控制起著重要作用[8]。例如,車輛行駛于顛簸路況時,路面近似于多個正弦路面的疊加[9],且駕駛室主要運動發生在俯仰平面。在此情況下,與三維駕駛室模型相比,平面動力學模型更便于研究人員快速對俯仰平面內的運動進行研究。然而,傳統的駕駛室俯仰平面動力學模型,沒有考慮駕駛室懸置系統導向機構的約束作用,僅能用于粗略計算駕駛室垂向運動和繞駕駛室質心的俯仰運動[10],不能用于研究駕駛室質心縱向動力學特性和駕駛室懸置導向機構的運動特性等。事實上,在俯仰平面內駕駛室質心存在一定的縱向水平運動[11],且駕駛員對低頻范圍內駕駛室的縱向振動比垂向振動更為敏感[12]。為給提高駕駛室縱向振動舒適性提供必要的理論指導和技術支撐,有必要考慮導向機構的約束作用,進而建立能夠反映駕駛室真實振動響應的俯仰平面動力學模型。
此外,駕駛室懸置系統控制策略開發大多基于駕駛室系統動力學模型[13-14]。目前,因所使用的俯仰平面動力學模型精度不高,而且不能計算駕駛室質心的縱向振動分量,影響了控制策略調控性能的提升。盡管黃德惠等[3]、Wang 等[15]和王國林等[16]基于商業化動力學軟件建立了復雜的駕駛室動力學仿真模型,但因沒有給出動力學方程,故它們均不便用于基于模型的駕駛室懸置系統控制策略研究,這使得它們在駕駛室控制研究中的應用受到了限制[17-18]。除了基于商業化動力學軟件的模型外,現有研究中鮮有文獻考慮駕駛室懸置導向機構的約束作用而創建俯仰平面動力學模型并給出振動方程。可見,駕駛室俯仰平面動力學模型尚待進一步研究。
本文旨在考慮駕駛室懸置導向擺臂的約束作用,重構駕駛室俯仰平面動力學模型,從而提高模型精度,拓寬模型工程應用范圍,為駕駛室懸置系統的設計與控制提供可靠的理論模型。
1 駕駛室懸置系統與俯仰平面約束
1.1 駕駛室懸置系統結構
重型貨車駕駛室懸置系統的結構形式很多,本文所研究的駕駛室懸置系統目前應用最為廣泛,其結構如圖1所示。

圖1 駕駛室懸置系統結構示意圖
由圖1 可知,駕駛室懸置系統由前懸置系統和后懸置系統組成。前懸置系統主要包括前彈簧-減振器總成、導向機構(由擺臂和擺臂支架組成);后懸置系統主要包括后彈簧-減振器總成。其中,彈簧為彈性元件,減振器為阻尼元件,導向機構主要起導向和約束駕駛室運動的作用。
1.2 駕駛室俯仰平面運動約束特性分析

圖2 俯仰平面結構示意圖
圖2 為圖1所示重型貨車駕駛室懸置系統在駕駛室俯仰平面內的結構示意圖。由圖2 可知,駕駛室懸置系統受到車架激勵時,擺臂繞其與擺臂支架的鉸接點W 發生轉角θ;在擺臂的約束作用下,駕駛室產生俯仰角φ,同時在縱向和垂向分別產生位移△x 和△z。此時,后減振器產生擺角△α。由此可見,在駕駛室俯仰平面內,由于擺臂的約束作用,駕駛室的俯仰運動、縱向運動及垂向運動相互耦合。
2 駕駛室俯仰平面動力學建模
2.1 物理模型
目前研究駕駛室在俯仰平面的振動與控制時,所采用模型通常不考慮駕駛室懸置導向機構的約束,僅考慮駕駛室垂向運動和繞駕駛室質心的俯仰運動,如圖3(a)所示。為提高駕駛室俯仰平面動力學模型的精度,拓寬模型工程應用范圍,本文中在前述駕駛室俯仰平面運動約束分析基礎上,創建了考慮擺臂約束的駕駛室俯仰平面動力學模型,如圖3(b)所示。

圖3 駕駛室俯仰平面物理模型
圖3 (b)所示模型中,除去車架外的運動構件包括:前減振器桿和筒、后減振器桿和筒、擺臂及駕駛室,共6 個。A 和A"分別為后懸置彈簧-減振器總成與駕駛室和車架的鉸接點;B 和B"分別為前懸置彈簧-減振器總成與駕駛室和車架的鉸接點;C 為駕駛室的質心;D 為駕駛室和擺臂的鉸接點;W 為擺臂與擺臂支架的鉸接點;E 為駕駛室地板上的任意一點。前減振器桿與筒之間為1 個移動副;前減振器兩端為2 個旋轉副;后減振器桿與筒之間為1 個移動副;后減振器兩端為2個旋轉副;導向擺臂端部為2個旋轉副。因此,振動模型中共有8 個低副。在俯仰平面中,每個構件共可存在3 個自由度,每個低副約束2 個自由度。故駕駛室系統的自由度為:6×3-8×2=2個。此外,模型不計駕駛室懸置與導向機構的質量,不考慮它們的慣性力與力矩。圖中,m 為駕駛室等效質量的1/2,Kf和Cf分別為前懸置的剛度和阻尼,Kr和Cr分別為后懸置的剛度和阻尼,qf和qr分別為前、后彈簧-減振器總成的位移激勵,qW為擺臂支架的位移激勵。
2.2 振動微分方程
如圖3(b)所示,設整體坐標系O-xyz 的原點O與駕駛室系統靜平衡時擺臂與車架的鉸接點W 重合,x 軸水平向前,z 軸垂直向上。在車架激勵qr、qW和qf共同作用下,即駕駛室后部車架A"點發生位移qr,駕駛室前部車架B"點發生位移qf且W"點發生位移qW,導致擺臂發生轉角θ,駕駛室繞著y 軸旋轉了角度φ。駕駛室靜平衡時,θ 和φ 均為零。由于該系統具有2 個自由度且θ 和φ 相互獨立,故選取θ 和φ為廣義坐標。
2.2.1 運動學方程
駕駛室中可靠的點位與運動速度是進行動力學建模的基礎和關鍵,因此,必須建立駕駛室關鍵點位的運動學方程。根據駕駛室及其懸置系統的結構尺寸,可得駕駛室靜平衡時各點在坐標系O-xyz 中的初始坐標為A(xA0,zA0),B(xB0,zB0),C(xC0,zC0),D(xD0,zD0),E(xE0,zE0)及W(xW0,zW0)。在車架激勵qr、qW和qf共同作用下,各點坐標可分別表示為

式中l為擺臂兩個鉸接點W和D間的長度。
根據上述點位坐標的解析表達式,求導可得各點坐標的速度和加速度解析表述式。
2.2.2 動力學方程
下面基于所建運動學方程,利用拉格朗日建模方法,建立考慮擺臂約束的駕駛室俯仰平面動力學方程。
駕駛室系統的拉格朗日方程形式為

式中:T、V 和D 分別為駕駛室系統的動能、勢能和耗散能;p1和p2分別為廣義坐標θ和φ。
駕駛室系統的動能表示為
式中:a0= xC0- xD0;b0= zC0- zD0;J為駕駛室繞其質心C的俯仰轉動慣量的1/2。
駕駛室系統的勢能表示為

其中:a1= xA0- xD0;b1= zA0- zD0

駕駛室系統的耗散能表示為


其中:

式中:Cff和Cfy分別為駕駛室前懸置減振器復原行程和壓縮行程的阻尼系數[2];Crf和Cry分別為后懸減振器復原行程和壓縮行程的阻尼系數。

將式(2)~式(4)代入式(1),可得

其中:

將式(2)~式(4)代入F1和F2的表達式,可將式(5)右邊進一步表示為關于變量(θ,θ?,φ,φ?)的函數,即以θ 和φ 為廣義坐標的駕駛室俯仰平面動力學方程為

3 試驗驗證與模型對比
3.1 整車道路試驗與振動信號采集
為驗證所建動力學模型的可靠性,以某重型貨車為例,參照國標GB/T4970—2009《汽車平順性試驗方法》進行了道路試驗,并利用圖4(a)所示的LMS Test.Lab 測試設備采集了振動信號。其中,試驗車輛駕駛室前、后懸置均采用了螺旋彈簧和雙筒式液壓減振器。表1 為廠家提供的駕駛室懸置系統參數的試驗值。

圖4 LMS測試系統和加速度傳感器布置

表1 駕駛室懸置系統動力學參數
因本文重點關注駕駛室及其懸置系統,所建模型未考慮座椅懸置系統對駕駛室振動響應的影響,故在試驗前拆除了坐墊并將座椅懸置導向機構鎖死,使座椅與駕駛室近似剛性連接。試驗用加速度傳感器的型號為PCB356A26,試驗前分別安裝在駕駛室地板上和駕駛室前、后懸置安裝位置處車架上,如圖4(b)~圖4(d)所示。其中,因車架上W"和B"點(圖3 所示)間距很小,兩點激勵幾乎相同,故在前懸車架僅布置了一個加速度傳感器。試驗路面為瀝青路,分別以50、60、70、80、90 和100 km/h 行駛速度進行道路試驗。其中,信號采集時間和頻率分別為120 s和400 Hz。6次試驗測得的加速度信號時間歷程類似。其中,80 km/h 工況下測得的信號如圖5所示。

圖5 80 km/h工況下測得的加速度信號
3.2 道路試驗驗證與模型對比
為了進一步驗證所建駕駛室俯仰平面動力學模型的可靠性,以前面試驗測得駕駛室前、后懸置安裝位置處車架加速度信號作為模型輸入進行動力學仿真。基于仿真所得駕駛室地板垂向和縱向加速度時間歷程,分別算得駕駛室地板垂向和縱向加速度均方根仿真值,仿真值與試驗值的對比如表2 所示。表中,不考慮約束情況下的地板縱向加速度仿真值,是首先根據傳統不考慮約束的駕駛室俯仰平面動力學模型計算得到俯仰加速度和地板測點與駕駛室質心的垂向距離,然后通過幾何換算得到的。
為了進一步考察所建模型與試驗的差異,繪制了100 km/h工況下駕駛室地板垂向和縱向加速度響應的時間歷程,仿真曲線與試驗曲線對比如圖6 所示。其中,為了便于直觀考察不同曲線的差異,時間軸顯示范圍設置為0~60 s。

表2 地板加速度均方根仿真值與試驗值對比
由表2 可知:基于本文所建考慮約束的駕駛室俯仰平面動力學模型,計算得到的駕駛室地板垂向和縱向加速度均方根仿真值與試驗值的最大相對偏差分別為11.3%和14.3%;基于不考慮約束的駕駛室俯仰平面動力學模型,計算得到的垂向和縱向仿真值與試驗值的最大相對偏差分別為16.9%和42.2%。與不考慮約束的模型相比,本文所建模型在垂向和縱向的計算精度均有所提高,盡管與試驗結果還存有一定的差異。由圖6 可知,本文所建模型與試驗吻合程度更高,盡管在某些時間點與實際值還存在差異。上述對比結果表明,與不考慮約束的駕駛室俯仰平面動力學模型相比,本文所建考慮約束的駕駛室俯仰平面動力學模型的計算結果更接近工程實際,更能有效復現隨機工況下駕駛室系統的真實動力學響應。
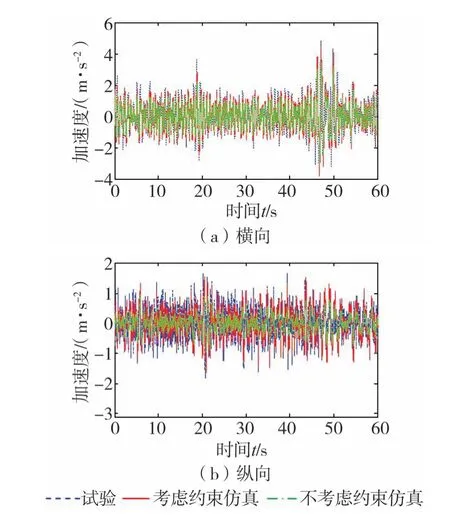
圖6 100 km/h工況駕駛室地板加速度時間歷程對比
造成本文所建模型與試驗差異的原因很多,主要原因包括兩點:其一,為了避免駕駛室懸置導向機構的彈性連接增加模型自由度,本文所建模型將駕駛室懸置系統導向機構中各部件連接處橡膠襯套的彈性連接簡化為運動副連接,因而模型中忽略了橡膠襯套非線性剛度和阻尼特性的影響;其二,所建模型僅局限在駕駛室俯仰平面內,它還不能完全反映其它自由度,具體包括橫擺、側傾和橫向等自由度的影響。事實上,駕駛室動力學模型的精度與模型自由度直接相關,模型自由度越多則其精度往往越高,但模型復雜程度也隨之提高,給工程應用帶來不便。
4 工程應用
傳統駕駛室俯仰平面動力學模型僅能用于粗略計算駕駛室垂向和俯仰動力學特性,無法用于計算駕駛室質心的縱向振動特性;本文所建模型考慮了導向擺臂約束的影響,不僅可較準確地計算駕駛室的垂向、俯仰動力學特性,而且可計算其縱向動力學響應特性,同時還可仿真出導向擺臂擺角與減振器前后擺角。本文所建模型不僅具有更高的計算精度,還拓寬了模型的應用范圍,因而具有更為廣闊的工程應用前景。不僅可用于駕駛室縱向振動響應特性分析、考慮駕駛室縱向振動舒適性的控制策略分析與開發,還可用于導向擺臂擺角估算、減振器前后擺角估算和駕駛室懸置系統動力學參數估計等。下面通過所建模型的工程應用實例,作進一步說明。
4.1 駕駛室質心的縱向振動響應特性分析
據前面分析可知,大多數重型貨車的駕駛室,為抑制其俯仰運動,都安裝了擺臂導向機構。但由于擺臂的約束作用,駕駛室的俯仰、縱向和垂向運動相互耦合,當車輛受到路面激勵時,會導致駕駛室產生縱向振動,進而使得駕駛員產生不舒適感。根據標準ISO2631 可知,在大約3.0 Hz以下,人體對縱向振動比垂直振動更敏感。因此,揭示低頻范圍內駕駛室質心的縱向振動響應特性對提高駕駛員的舒適性很重要。例如,基于所建模型給出了駕駛室懸置受幅值A=25.0 mm且頻率f=1.0,2.0,3.0 Hz的正弦垂向激勵時,駕駛室質心的水平位移和加速度曲線,如圖7 所示。由圖可見,不同頻率的垂向激勵所引起的駕駛室質心縱向振動差異較大,故在駕駛室舒適性分析時應考慮垂向激勵頻率對縱向振動響應的影響。

圖7 駕駛室質心的縱向動力學響應
4.2 考慮縱向振動的懸置控制策略的分析與開發
駕駛室的縱向振動加速度是駕駛室振動舒適性的重要評價指標[11]。因此,在駕駛室懸置控制策略開發時,通常需要綜合考慮駕駛室的垂向和縱向振動。然而,傳統模型因無法計算駕駛室質心的縱向振動而不適用于考慮駕駛室縱向振動的懸置控制策略分析與開發。與傳統模型相比,本文所建模型提高了計算精度,且在沒有增加駕駛室系統自由度的前提下,可以計算駕駛室質心的縱向振動分量,因而適用于考慮駕駛室縱向振動的懸置控制策略分析與開發。
例如,基于本文所建模型,利用最優控制理論[14],給出了兩種最優控制器下駕駛室質心加速度均方根響應,如表3 所示。其中,控制器1 僅以駕駛室垂向加速度最小為控制目標,控制器2 以垂向和縱向加速度的平方和最小為控制目標。表3 表明,與控制器1 相比,在控制器2 情況下,瀝青路況下駕駛室質心垂向加速度均方根略有增大,但縱向加速度明顯減小,因而進一步提升了駕乘舒適性。可見,在駕駛室懸置控制器開發時,有必要考慮駕駛室縱向振動響應。

表3 瀝青路況下駕駛室質心加速度均方根m/s2
4.3 駕駛室懸置導向擺臂的擺角估計
駕駛室前懸導向擺臂的擺動角行程設計,對駕駛室的振動舒適性具有重要影響。在新產品開發初期,常需要提取對標車輛常用行駛路況下擺臂的擺角行程作為擺動角設計域的參考值[11]。例如,表4給出了基于模型得到的上述試驗車輛在瀝青路上以不同車速行駛時,駕駛室前懸導向擺臂的擺角行程。由表4 可知,隨著車速提高,導向擺臂的擺動角行程逐漸增大。表中數據可為同類車型駕駛室懸置導向擺臂擺角的設計提供重要依據和有益參考。

表4 瀝青路況下駕駛室前懸導向擺臂的擺角
4.4 駕駛室懸置減振器的擺角估算
減振器擺角的大小,決定著減振器的側向受力及其端部連接襯套的扭轉受力情況,進而影響著減振器總成的使用壽命[19]。因此,在駕駛室減振器總成臺架疲勞壽命試驗時,常需要提取車輛常用行駛路況下減振器的擺角作為其在臺架上安裝姿態、擺動范圍的參考值[11,19]。例如,表5為基于模型得到的上述試驗車輛在瀝青路上以不同車速行駛時,駕駛室減振器的擺角情況。由表5 可知,隨著行駛車速的提高,駕駛室前、后減振器的擺角行程均隨之增大。表中數據可為駕駛室減振器總成疲勞試驗設置提供有益參考。

表5 瀝青路況下駕駛室懸置減振器擺角
4.5 駕駛室懸置系統動力學參數估計
在駕駛室懸置系統開發時,設計人員常以對標車輛的懸置參數作為參考值[3]。基于傳統動力學模型,通過辨識方法可得對標車輛駕駛室懸置系統參數;但因誤差較大,很難滿足工程要求。其中,辨識結果的誤差在一定程度上依賴于所使用模型的計算準確性[17]。此外,盡管設計者可將對標車輛的駕駛室懸置系統進行拆解,利用相應的測試設備對所需求參數逐一測量,但這種方法需要專門測試設備,成本高、測試周期長,甚至因拆解導致懸置損壞而無法測試得到準確的需求參數。為此,下面假設表1 的實際參數值均未知,基于所建模型,利用試驗采集數據,通過系統辨識方法進行獲取[20],結果如表6所示。
由表6 可知,基于不考慮約束和考慮約束的駕駛室俯仰平面動力學模型的估計值與實際值的最大相對偏差分別為19.8%和7.9%。可見,基于本文所建考慮約束模型的參數辨識方法,可獲得更可靠的駕駛室懸置系統動力學參數值,且該方法克服了直接測量方法的諸多缺陷。此外,對比結果也表明了在建立駕駛室系統俯仰平面動力學模型時考慮導向擺臂約束的必要性。

表6 駕駛室懸置系統動力學參數估計結果
5 結論
針對重型貨車駕駛室俯仰平面動力學傳統模型計算精度不高且工程應用受局限問題,開展了駕駛室理論建模和試驗研究,得到的主要結論如下。
(1)在駕駛室俯仰平面內,由于擺臂的約束作用,駕駛室的俯仰、縱向和垂向運動相互耦合,而非僅發生俯仰運動和垂向運動。
(2)創建了考慮約束的駕駛室俯仰平面動力學模型;基于拉格朗日建模方法,推導了其振動微分方程,并給出了其簡潔的解析表達式。
(3)試驗結果表明,與不考慮約束的模型相比,本文所建模型的計算結果更接近工程實際,更能有效復現隨機工況下駕駛室系統的真實動力學響應。
(4)與不考慮約束的模型相比,本文所建模型計算精度更高,工程應用范圍更廣,不僅可用于駕駛室縱向振動響應特性分析、考慮駕駛室縱向振動舒適性的懸置控制策略分析與開發,還可用于導向擺臂擺角估算、減振器前后擺角估算和駕駛室懸置系統動力學參數的估計等。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
