航天器零推進劑姿態機動啟發式規劃方法
2021-02-24 08:48:34李朝玉朱圣英陳德相
宇航學報 2021年12期
王 卓,徐 瑞,李朝玉,朱圣英,陳德相
(1. 北京理工大學宇航學院,北京 100081;2. 深空自主導航與控制工業和信息部重點實驗室,北京 100081;3.上海衛星工程研究所,上海 200240)
0 引 言
隨著航天技術的發展,需要航天器具有良好的姿態機動能力,而航天器的姿態機動能力在很大程度上取決于姿態執行機構的能力[1]。航天器在完成姿態機動任務時,大多采用推力器作為姿態執行機構。然而,采用推力器進行長周期大角度的姿態機動會消耗大量燃料,在一定程度上限制了航天器的工作能力。零推進劑姿態機動(Zero propellant maneuver, ZPM)技術是一種成功應用于國際空間站的大角度姿態機動技術[2]。ZPM采用控制力矩陀螺代替推力器作為姿態執行機構,這在延長航天器在軌時間,提高航天器安全性方面具有實際意義[3]。
ZPM的概念最早出現于1996年,由美國麻省理工學院德拉普爾實驗室的Bedrossian提出[4]。其核心思想是提前規劃出滿足控制力矩陀螺約束的姿態路徑和控制力矩陀螺框架角運動路徑,使得航天器在執行多種空間任務時控制力矩陀螺不會陷入奇異或飽和狀態,從而不需要消耗額外燃料進行姿態機動或消除控制力矩陀螺的奇異和飽和狀態,進而實現航天器的零推進劑姿態機動。
2006年11月5日,NASA首次在國際空間站上采用ZPM技術完成了90°的大角度姿態機動,使用雙框架控制力矩陀螺作為姿態執行機構[5]。2007年3月3日,NASA在國際空間站上通過ZPM技術實現180°的大角度姿態機動,和同等機動條件下的推力器相比節省50.76 kg燃料消耗,節約的燃料成本達110萬美元[6]。同時,預計于2022年完成的中國空間站,采用的執行機構是可靠性高和可控性好的單框架控制力矩陀螺(Single gimbal control moment gyroscopes,SGCMGs)[7]。上述工程實驗為本文的研究提供了方向和理論依據,但是其考慮的約束較少,而實際的航天器大角度姿態機動不僅要考慮控制力矩陀螺的約束,更要考慮姿態約束。
當前的SGCMGs的研究,大多基于給定參考姿態機動路徑的SGCMGs奇異躲避或逃離操縱律設計[8-10]。Kurokawa使用梯度法避免SGCMGs奇異,將零運動添加到偽逆解中得SGCMGs奇異避免操縱律,但是這種方法可能會陷入某些特殊的奇異狀態[11]。Bedrossian等提出了基于力矩誤差的奇異魯棒操縱律,可以讓SGCMGs在陷入奇異時快速逃離奇異,但是當控制力矩矢量和奇異方向一致時,就會陷入鎖死狀態從而無法逃離奇異[12]。Hou等提出了一種解析的SGCMGs奇異躲避操縱律,在滿足系統性能指標的同時實現全局奇異躲避[13]。上述方法可以跟蹤設定好的參考姿態路徑進行奇異躲避,但是實際運行中的航天器姿態路徑難以提前確定,且航天器難以實時更新姿態路徑參數。因此,雖然上述方法可以有效避免SGCMGs奇異,但并不適合解決實際航天器運行中的ZPM問題。
針對ZPM問題,在設計SGCMGs奇異躲避操縱律的同時,也要對航天器的姿態機動進行規劃[14-16]。NASA的Bedrossian等通過偽譜法進行ZPM技術的研究,借助DIDO優化軟件設計出國際空間站首次ZPM大角度姿態機動的路徑軌跡[2]。Zhang等采用高斯偽譜法得出最優的姿態機動路徑和SGCMGs框架角運動,能夠使SGCMGs在ZPM機動中一直遠離奇異狀態[17]。但是通過偽譜法仿真可以發現,該方法的計算時間過長且無法滿足節點間約束。為了實現時間和能量等多種指標優化,Zhao等提出了偽譜法和物理規劃相結合的混合算法,實現了ZPM中SGCMGs框架角運動的多目標優化,但也只能生成無姿態約束的機動路徑[18]。以往的研究一般只考慮ZPM過程中的SGCMGs約束和初始邊界約束,而忽略了姿態空間約束,如太陽能電池板和光學敏感器的方位約束[19]。同時,大多數ZPM規劃方法通過偽譜法和優化工具箱進行全局離線規劃,難以實現在軌應用,因此需要研究考慮滿足多種約束的在線ZPM規劃方法。
基于上述討論,本文主要研究航天器姿態機動過程中的ZPM技術,旨在提出一種同時考慮姿態約束和SGCMGs約束的ZPM路徑規劃方法,使航天器在進行姿態機動前可以規劃出一條滿足多種約束的姿態機動路徑和SGCMGs框架角路徑。本文提出一種基于約束評價啟發式的差分進化(Differential evolution,DE)方法,通過對ZPM原理進行約束和復雜度分析,設計姿態規劃空間內的ZPM規劃序列,采用歐拉機動保證路徑的連續性。在規劃空間中建立約束評價函數,設計基于評價函數的啟發式策略,對航天器約束和控制力矩陀螺約束進行解耦處理。將約束評價啟發式策略用于改進DE算法的種群變異,引導ZPM規劃序列滿足約束。最后通過航天器ZPM仿真校驗,驗證啟發式DE方法的合理性和有效性。
1 航天器零推進劑姿態機動模型
本節對航天器ZPM進行建模和約束分析,并且定義了新的SGCMGs飽和度量。
1.1 ZPM動力學
本文將航天器視為能夠三軸運動的剛體,在繞中心天體轉動的同時可以自由機動[14],并以SGCMGs為姿態執行機構,選擇姿態四元數作為姿態參數,ZPM的姿態運動學和動力學方程如下:
(1)
(2)
式中:姿態四元數q=[q0,q1,q2,q3]T,且滿足:
(3)
其中:uc表示SGCMGs提供的控制力矩;Te表示環境力矩;J是航天器的慣性矩陣;ω0表示航天器的軌道角速度;ω=[ω1,ω2,ω3]T表示航天器角速度,ω+是ω的叉乘矩陣形式:
(4)
在ZPM中需要考慮SGCMGs框架角運動,SGCMGs的動力學方程為:
(5)
(6)
式中:hc表示SGCMGs角動量;h0表示單個SGCMG的角動量;δ表示SGCMGs框架角組合;Jc(δ)表示SGCMGs控制力矩的雅克比矩陣:
Jc(δ)=ACδ-BSδ
(7)
式中:A和B是SGCMGs的安裝矩陣,與SGCMGs的構型相關;Sδ是框架角組合的正弦對角矩陣;Cδ是框架角組合的余弦對角矩陣。
1.2 SGCMGs約束
實現ZPM的關鍵是機動過程中SGCMGs滿足奇異和飽和約束,這里對SGCMGs約束進行分析。
單個SGCMG只能產生垂直于框架軸的角動量,因此只能提供單自由度的控制力矩。為了實現航天器的三軸控制,至少需要三個及以上SGCMG提供控制力矩[18]。由于可靠性高和控制性能較好,本文采用五棱錐構型的SGCMGs,如圖1所示。
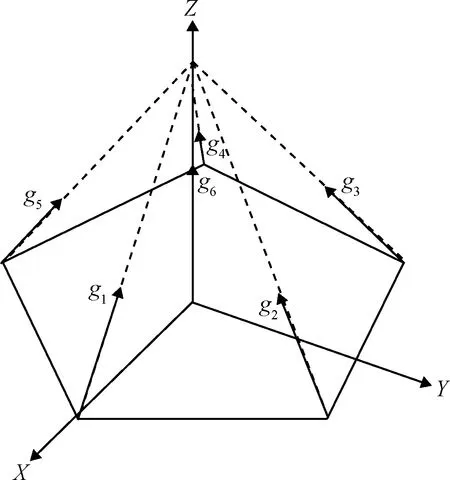
圖1 五棱錐構型SGCMGs示意圖Fig.1 Illustration of SGCMGs with pentagonal configuration
SGCMGs構型和框架角組合共同決定SGCMGs控制力矩的大小和方向,但在某些特定的框架角組合中,SGCMGs產生的力矩處于同一個平面內,無法提供期望的控制力矩,這種現象叫做SGCMGs奇異,也被稱為內部奇異。
在ZPM中SGCMGs需要遠離奇異狀態。衡量SGCMGs奇異程度的參數為奇異度量m:
(8)
當奇異度量m等于0時,SGCMGs陷入奇異狀態,SGCMGs的奇異約束為:
m>0
(9)
本文SGCMGs飽和是指SGCMGs的總角動量達到角動量包絡面,無法繼續沿角動量包絡面的法線方向提供力矩,也稱為外部奇異。五棱錐構型SGCMGs的包絡面是有著六對凹陷的近似的球體。為了避免SGCMGs飽和,當前的研究主要是以角動量包絡面上的最小振幅Hm為半徑的球體作為SGCMGs框架角的可行解空間[20],設置飽和約束為:
(10)

根據式(9)判斷飽和約束不僅會減少SGCMGs角動量的可行域,同時僅根據SGCMGs角動量而不是框架角組合來進行規劃,有時無法得到準確的SGCMGs框架角運動路徑。
因此,本文基于SGCMGs框架角組合設計飽和度量b,用以衡量SGCMGs飽和狀態:
(11)
SGCMGs遠離飽和狀態,需要保證飽和度量b大于0,即SGCMGs的飽和約束為:
b>0
(12)
1.3 姿態約束
除了上述SGCMGs約束,航天器在ZPM過程中也面臨較為復雜的姿態約束,包括姿態指向約束、有界約束和初始終端約束等[14]。
姿態指向約束縮小了ZPM中航天器的可行姿態空間。航天器必須避免強光天體進入光學元件的視場[15],姿態指向約束表示形式為:
(13)
式中:rb表示光學元件在本體系的方向;CbI表示航天器的姿態轉換矩陣;ri表示強光天體在慣性系中的方向;θ是光學元件視場角。圖2所示為姿態指向約束示意圖。
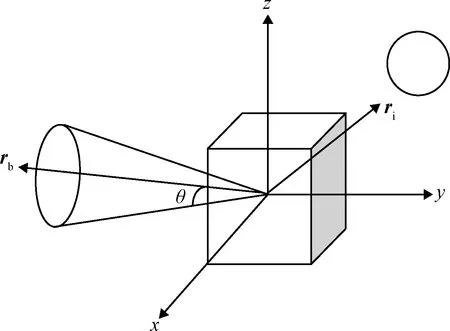
圖2 姿態指向約束示意圖Fig.2 Illustration of attitude pointing constraint

(14)
初始終端約束是指ZPM中航天器從初始平衡狀態機動到目標平衡狀態:
(15)
式中:q0為初始姿態;qf為目標姿態;δ0為初始框架角;δf為目標框架角;t0為初始時間;tf為終端時間。
1.4 ZPM規劃模型
基于上述動力學和約束分析,建立ZPM規劃模型如下:
(16)
基于ZPM規劃模型對航天器姿態機動進行規劃,即可得到航天器的姿態路徑和SGCMGs框架角路徑。
2 約束評價啟發式DE算法
本文提出基于約束評價啟發式的DE算法,在姿態規劃空間中設計約束評價函數和啟發式策略,并基于DE算法框架進行ZPM規劃。
2.1 ZPM規劃序列
本文在姿態規劃空間中進行ZPM規劃,本節設計對應的ZPM規劃序列,便于后續規劃。
從式(16)可以看出,ZPM問題中的航天器運動以及SGCMGs框架角運動分別位于姿態規劃空間和SGCMGs框架角規劃空間,且存在映射關系。3維的姿態規劃空間映射到6維的框架角規劃空間,單個姿態規劃解對應一個或多個框架角組合規劃解。
基于ZPM的規劃復雜度和約束復雜性,選擇在姿態規劃空間中進行ZPM規劃。耦合約束限制了ZPM的可行解空間和規劃速度,選擇姿態規劃空間既可以參數化多個ZPM指標,又可以通過降維來提高ZPM規劃效率。
考慮到偽譜法中節點間約束難以滿足,本文在姿態空間中設計基于多段歐拉參數的ZPM規劃序列P:
P=(s1,t1,…,si,ti,…,sn,tn),(i∈1,…,n)
(17)
式中:s為節點姿態參數,且si=(qi0,qi1,qi2,qi3),t為規劃步長,且都為正整數,下標i表示節點序號。
在ZPM規劃序列P中,以歐拉姿態機動執行規劃動作,連接節點之間的姿態路徑:
(18)


(19)
進一步地,路徑旋轉四元數qr為:
(20)
節點si和si+1之間路徑集合qsi(j), (j=1,…,ti):
qsi(j)=qsi(j-1)?qr, (j=1,…,ti)
(21)
將式(21)帶入式(17)的規劃序列P中,即可得到n-1段連續姿態機動路徑。在ZPM規劃模型的基礎上,以機動時間為目標函數,將ZPM規劃問題轉化為時間優化問題,在姿態規劃空間中求解,得到航天器姿態路徑q(t)、角速度ω(t)和SGCMGs框架角δ(t)。
2.2 約束評價啟發式
ZPM問題中SGCMGs約束和姿態約束耦合,增加了規劃求解難度。當前ZPM研究多是基于偽譜法進行規劃[16-18],但是偽譜法在約束增多的情況就會出現規劃效率降低和難以滿足節點間約束的情況。且多數研究僅考慮SGCMGs約束,忽略了姿態指向等姿態約束。
面對多種ZPM約束耦合難以處理的問題,本文設計約束評價啟發式,以期快速引導ZPM規劃序列滿足上述約束。
首先,基于ZPM過程中約束的影響機理對ZPM約束進行解耦分類處理。航天器姿態指向約束和有界約束分別在三維空間指向和節點間距離方面對ZPM路徑進行限制,SGCMGs奇異和飽和約束同時在SGCMGs框架角組合方面進行限制。因此根據其約束機理設置姿態指向約束評價函數、有界約束評價函數、SGCMGs奇異和飽和約束評價函數。
然后,針對約束評價函數,設計啟發式策略,引導ZPM規劃序列P滿足上述多種約束。約束評價啟發式以約束處理為主要關注目標,具體過程如下。
(22)
式中:k代表姿態指向約束區域序號;θk為對應的約束區域視場角。
(23)
式中:
(24)
式中:I3表示3階單位矩陣。
(25)

(26)
通過候選安全節點sp替換約束節點si,啟發式引導規劃序列P滿足姿態指向約束:
(si,ti)=(sp,tp)
(27)
在有界約束啟發式方面,不涉及路徑指向,主要考慮路徑中的節點距離。有界約束和規劃步長ti負相關,通過限制路徑的控制力矩和角速度壓縮節點間空間距離。值得注意的是,這里的規劃步長ti指的是姿態規劃序列P中節點間的機動時長。
因此,這里將有界約束滿足問題轉化為規劃步長ti選擇問題。通過節點空間距離和有界約束上限來估計規劃步長ti,設計有界約束評價函數Cd(si)來判斷約束區間和約束程度,采用評估Cd(si)引導規劃序列滿足有界約束的啟發式策略。
Cd(si)=Cd(uc)+Cd(ω)
(28)
在姿態規劃空間中,控制力矩和角速度同時影響規劃步長ti,因此有界約束評價函數Cd(si)由控制力矩和角速度對規劃步長ti的評價函數Cd(uc)和Cd(ω)組成:
(29)
式中:uc(k)和ω(k)表示從節點si和節點si+1的中間路徑的控制力矩和角速度,規劃步長ti對應中間路徑的機動時長,w1和w2分別表示控制力矩和角速度的估計權值,滿足w1+w2=N1:
(30)
式中:N1為權值系數;w1和w2互斥是因為在同一節點處只有一種有界約束處于主導位置。
當Cd(si)>1時,節點si違反有界約束。通過Cd(si)判斷P中違反有界約束的節點、違反程度以及對應的約束項,同時用于生成新的規劃步長。基于當前規劃步長ti和對應的Cd(si)估計滿足有界約束的規劃步長td:
td=ceil(tiln(Cd(si))+1)
(31)
其中,ceil( )表示返回大于或者等于指定表達式的最小整數。
通過候選安全節點td替換約束節點規劃步長ti,引導規劃序列P滿足姿態指向約束。
在SGCMGs奇異和飽和約束啟發式方面,ZPM規劃序列P在姿態空間進行規劃,此時無法直接對SGCMGs奇異和飽和約束判斷。因此設計SGCMGs奇異和飽和躲避規劃操縱率,采用SGCMGs奇異約束評價函數Cm(si)和飽和約束評價函數Cb(si)來判斷約束區域和約束違反程度,再通過評估Cm(si)和Cb(si)引導規劃序列滿足約束的啟發式策略:
(32)
式中:δi表示si對應的SGCMGs框架角組合。當Cm(si)和Cb(si)都大于0時,SGCMGs滿足奇異和飽和約束。
通過對五棱錐構型的內部奇異點和外部奇異點分析,設計基于勢函數思想[10]的SGCMGs奇異和飽和躲避規劃操縱率,用于SGCMGs框架角運動提供航天器要求的指令力矩。
在框架角規劃空間中,設計SGCMGs內部奇異點持續排斥δi,SGCMGs外部奇異點先吸引再排斥的SGCMGs框架角運動規律,得到對應的框架角轉動矢量di的吸引勢函數Vai和排斥勢函數Vpi:
(33)
式中:w3和w4分別表示對應的勢函數權值。通過式(33)得到框架角轉動矢量di:
2w4(Cb(si))2
(34)

(35)

2.3 啟發式DE規劃
ZPM約束評價啟發式能夠處理ZPM過程中的復雜約束,可以和多種優化方法結合進行啟發式規劃,這里和DE算法結合進行啟發式DE規劃。
DE算法通過適應度函數對種群進行評價,通過變異交叉得到中間種群,基于適應度函數判斷是否得到最優個體[21]。啟發式DE規劃方法用啟發式約束評價函數更新適應度函數,將約束評價啟發式放入DE算法的變異過程中,快速引導規劃序列滿足多種約束。下面是約束評價啟發式的DE應用以及算法改進部分。
機動時間作為優化適應度函數:
Jt=tf
(36)
在啟發式變異方面,考慮到ZPM問題約束的復雜性,在變異進程中優先進行約束處理,通過判斷評價函數是否超出評價閾值Cw,進行如式(37)的約束評價啟發式規劃。當滿足約束之后,則進行變異操作,優化總適應度函數Jz。啟發式變異向量vj,G+1如下產生:
vj,G+1=
(37)

而突變算子F的取值影響算法的搜索空間和效率,F越大搜索范圍越廣,這里將F設置為根據規劃進程可變的形式:
F=exp(-fi/fmax)w
(38)
式中:fi是當前節點數;fmax是總節點數;w是控制參數。這樣突變算子F在規劃前期較大后期較小,這樣具有較好的前期全局規劃能力以及后期收斂速度。
根據總適應度函數Jz將最優個體與當前種群中的個體向量進行比較,選擇是否保留當前個體,逐代更新,得到ZPM的最優解。
3 仿真校驗
本節進行了多種約束條件下航天器ZPM規劃仿真,以校驗本文提出的啟發式DE規劃算法的有效性。
在仿真驗證中,航天器僅由SGCMGs提供控制力矩進行姿態機動,構型為五棱錐構型,每個SGCMG的轉子角動量為1000 N·m·s。航天器在z軸方向安裝光學相機,方向矢量由rb表示,其需要躲避的明亮天體的指向分別是ri1、ri2、ri3和ri4,視場角θ1、θ2和θ3是30°,θ4是25°,其他仿真參數見表1。
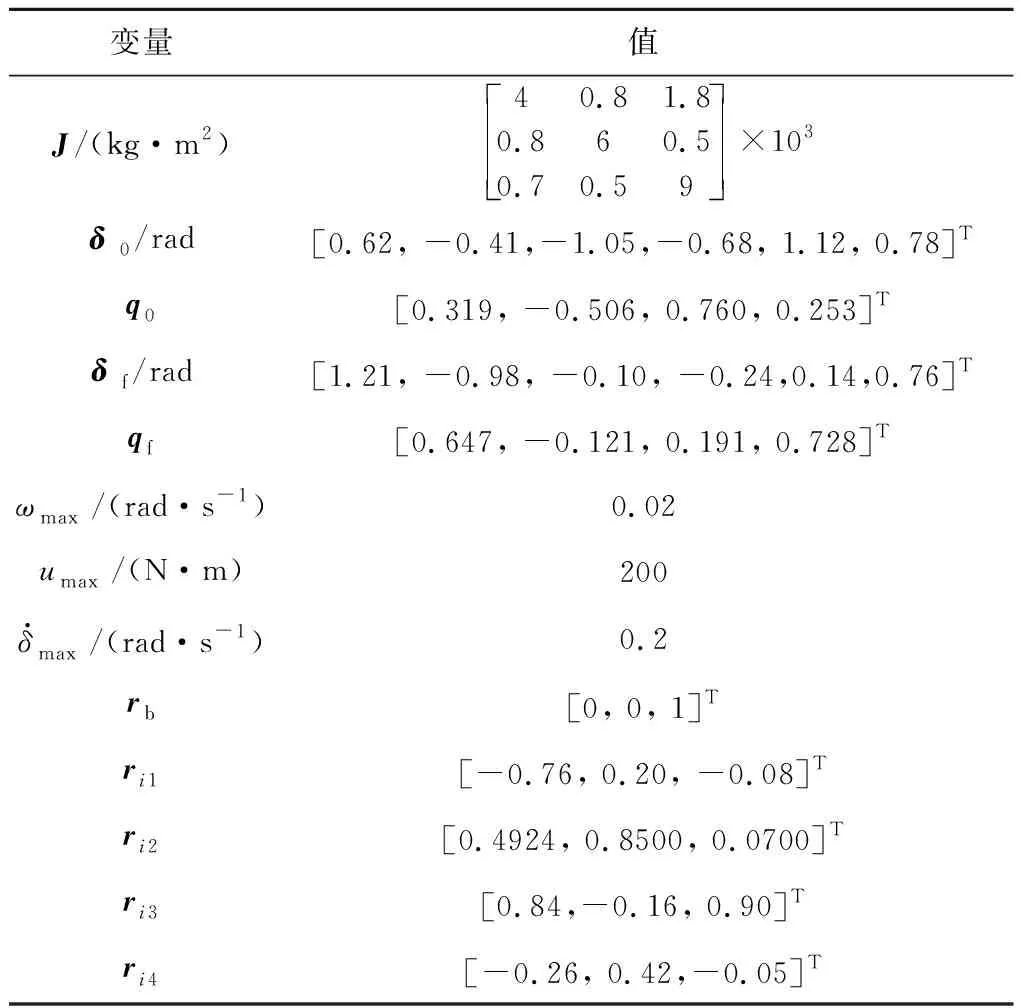
表1 仿真條件Table 1 Simulation conditions
通過啟發式DE方法,對ZPM進行仿真驗證,仿真結果如下。
圖3到圖5分別給出ZPM過程中的姿態參數、控制力矩和角速度。圖3顯示航天器能夠實現從初始姿態q0到目標姿態qf的平穩機動,滿足初始終端約束。圖4和圖5顯示由SGCMGs提供的控制力矩以及航天器角速度都沒有超出上限值,滿足有界約束。本文的離散ZPM規劃序列節點,節點之間的路徑通過歐拉姿態機動連接,因此控制力矩主要施加在節點處,保證節點間的機動連續性和角速度的平穩性。
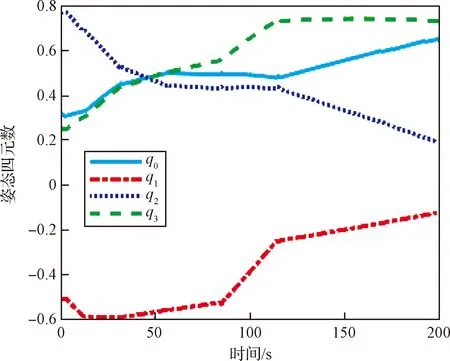
圖3 ZPM姿態四元數曲線Fig.3 ZPM attitude maneuver quaternion curve
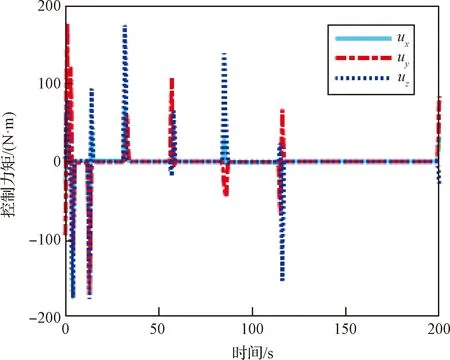
圖4 ZPM控制力矩曲線Fig.4 ZPM control torque curve
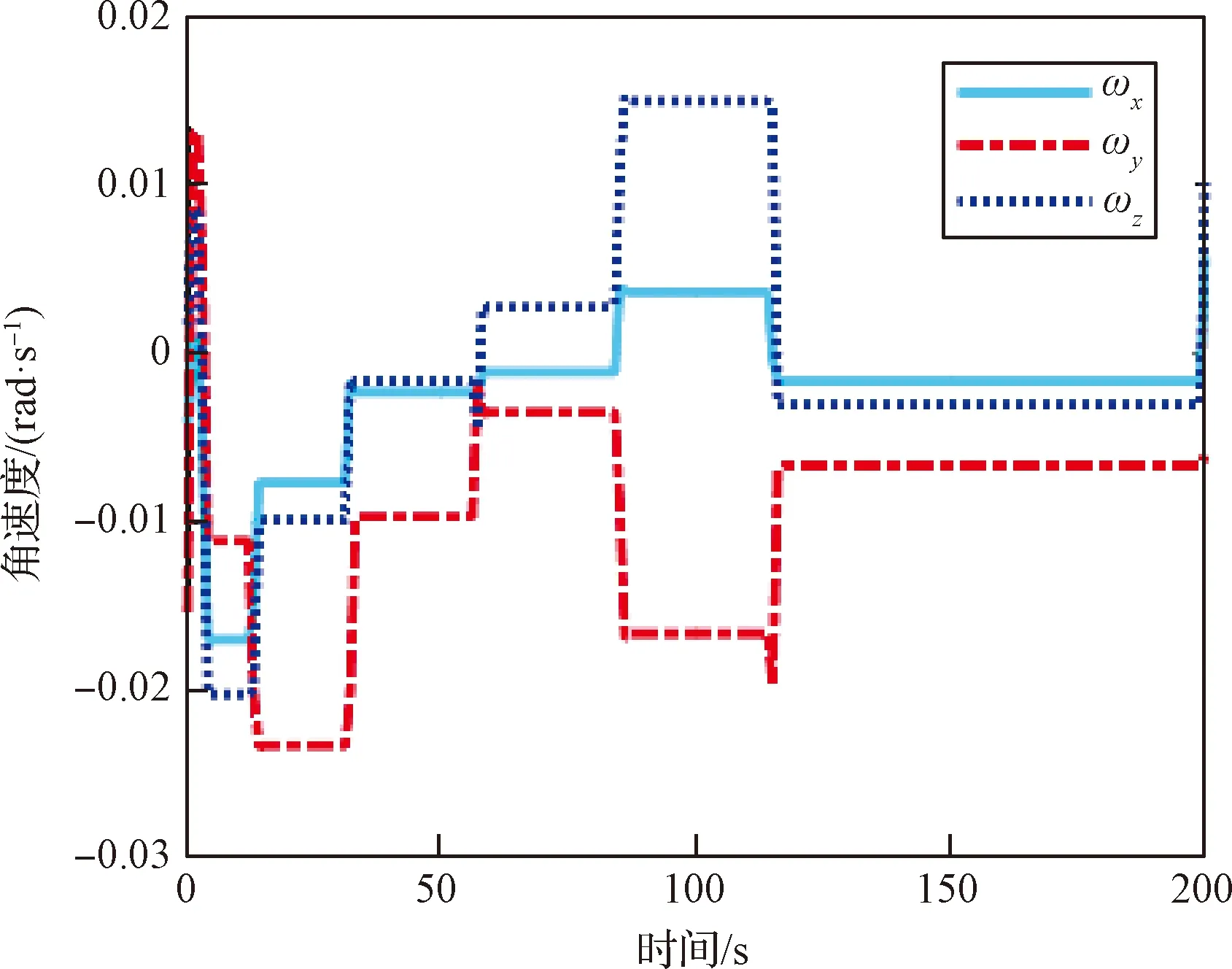
圖5 ZPM角速度曲線Fig.5 ZPM attitude angular velocity curve
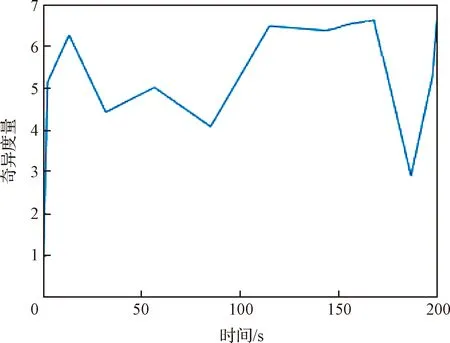
圖6 SGCMGs奇異度量Fig.6 Singular measures of SGCMGs
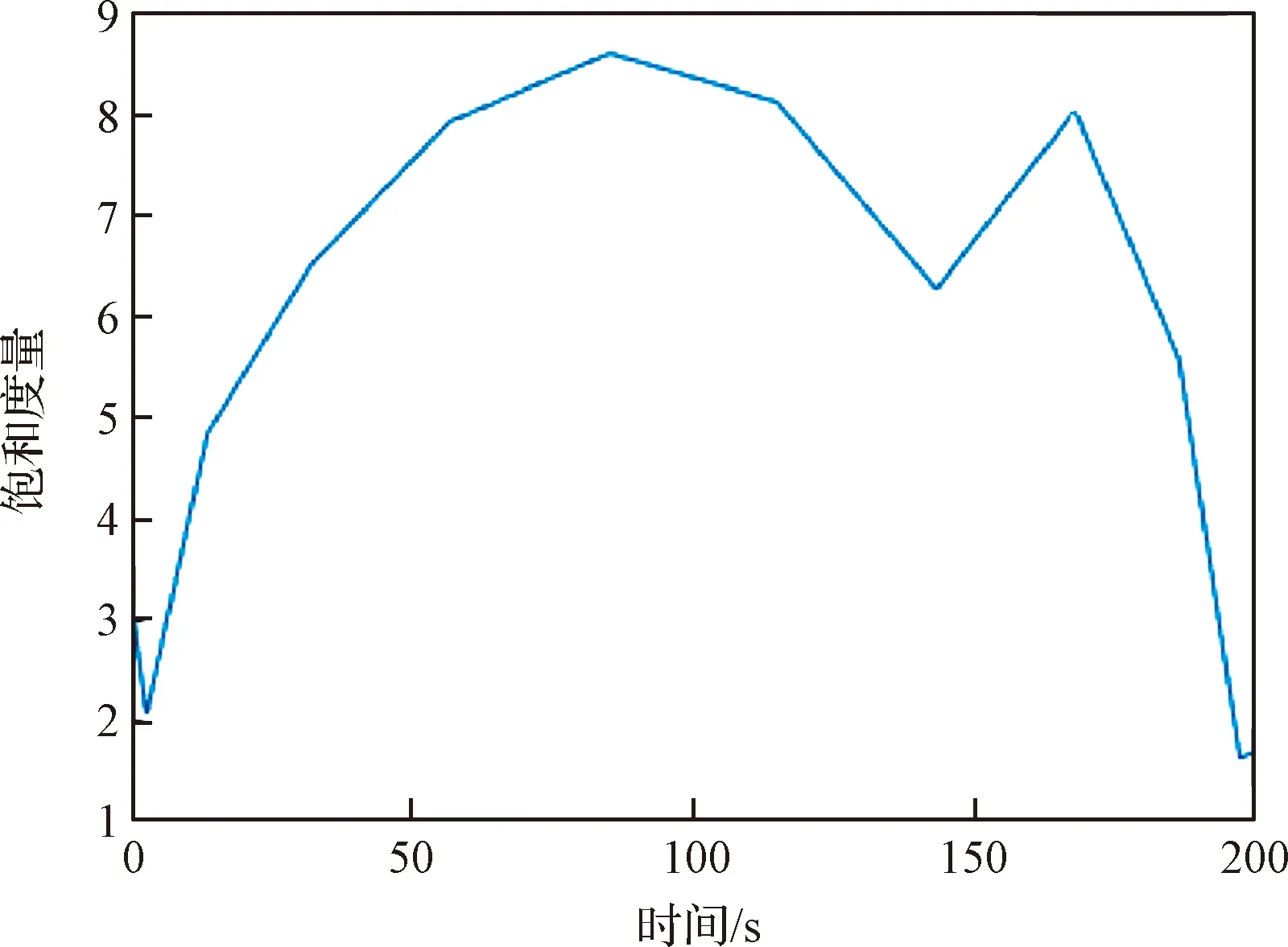
圖7 SGCMGs飽和度量Fig.7 Saturation measurement of SGCMGs
圖6和圖7給出ZPM過程中SGCMGs的奇異度量和飽和度量。圖6顯示機動過程中SGCMGs一直遠離奇異狀態,滿足奇異約束,圖7顯示機動過程中SGCMGs能夠避免進入飽和狀態,進而實現了航天器通過SGCMGs實現ZPM機動,無需消耗燃料。
圖8和圖9分別給出ZPM過程中航天器在天球坐標下的投影路徑和空間路徑。圖8中的橢圓和圖9中的圓形區域表示姿態禁止機動區域,實線為航天器姿態機動路徑。為了驗證本文約束評價啟發式的約束處理能力,將禁止區域密集設置。可以看出,在ZPM過程中光學相機能夠安全通過密集的禁止機動區域,有效滿足姿態指向約束,得到安全的ZPM路徑。

圖8 天球坐標系投影下航天器姿態路徑Fig.8 Spacecraft attitude path estimation based on celestial coordinate projection
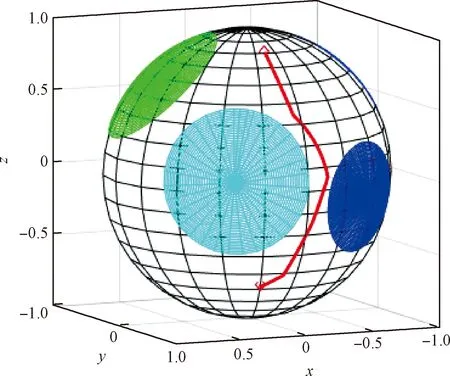
圖9 天球坐標下航天器空間三維姿態路徑Fig.9 Three-dimensional attitude path of spacecraft in celestial coordinates
為了驗證本文提出的啟發式DE方法的有效性,將啟發式DE方法和ZPM偽譜法[16]進行對比。仿真條件和約束設置相同,計算機主頻為3.2 GHz,內存是4 G,同時考慮SGCMGs約束和姿態約束,規劃結果對比見表2。
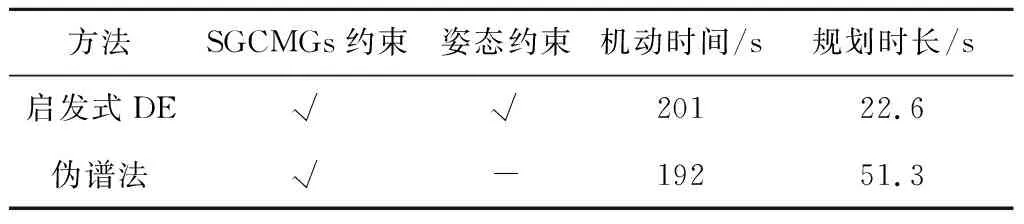
表2 規劃方法對比Table 2 Comparison of planning methods
由表2可知,本文的啟發式DE方法和偽譜法[16]都能夠有效地處理SGCMGs約束。但是在考慮密集姿態約束的情況下,偽譜法難以得到滿足姿態約束的ZPM路徑。而本文的啟發式DE方法可以同時滿足SGCMGs約束和姿態約束,得到安全的ZPM路徑。
值得注意的是,本文提出的啟發式DE方法的規劃時長與偽譜法相比減少了約56%,說明啟發式DE方法有更高的規劃效率,能夠實現快速ZPM規劃。而且,啟發式DE方法和偽譜法的路徑機動時間相差不大,說明啟發式DE方法同樣也具有較好的時間優化效果。
綜上看出,通過本文提出的啟發式DE方法,航天器能夠在姿態機動中通過SGCMGs實現零推進劑消耗。該方法通過約束評價啟發式引導,保證航天器滿足SGCMGs約束和姿態約束。平滑的姿態曲線表明該方法可以生成質量較好的平穩機動路徑,控制力矩和角速度低于上限值說明滿足姿態有界約束,姿態路徑曲線沒有經過陰影區域說明滿足姿態指向約束,SGCMGs奇異度量和飽和度量全程都大于0說明SGCMGs遠離奇異和飽和狀態。同時該方法和偽譜法[16]相比縮短了規劃時長,具有更好的約束處理能力和規劃速度。而且通過歐拉機動連接路徑節點,能夠保證ZPM路徑連續平穩,適合進行航天器ZPM應用。
4 結 論
本文研究了多種約束情況下的航天器ZPM問題,通過對SGCMGs和航天器進行約束和復雜度分析,針對耦合約束設計約束評價啟發式,結合DE算法進行啟發式DE規劃,并采用歐拉機動保證路徑的連續性。通過仿真驗證了該方法在解決ZPM問題方面的有效性和快速性,可以生成平滑的姿態四元數曲線,保證航天器滿足姿態約束,通過約束評價啟發式引導奇異和飽和度量避免SGCMGs陷入奇異和飽和狀態,和偽譜法相比具有較好的約束處理能力和規劃速度。該方法能夠實現姿態機動的零推進劑消耗,得到安全的ZPM路徑,在航天器姿態機動領域有較好的應用前景。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26