一種基于層次分析法的紅外多目標(biāo)威脅等級(jí)評(píng)估方法研究?
2021-02-26 12:35:24
艦船電子工程 2021年1期
(華中光電技術(shù)研究所-武漢光電國(guó)家研究中心 武漢 430223)
1 引言
現(xiàn)代空戰(zhàn)中,被動(dòng)式紅外多目標(biāo)探測(cè)成為隱蔽探測(cè)的主要手段之一。單站紅外探測(cè)設(shè)備由于探測(cè)方式不同,只能給出舷角、高低角和灰度等目標(biāo)信息,無法提供常規(guī)多目標(biāo)威脅等級(jí)排序需要的目標(biāo)距離、飛行高度等信息[1~5],這給多目標(biāo)威脅等級(jí)排序帶來很大困難,制約了單站紅外探測(cè)設(shè)備的作戰(zhàn)效能。
層次分析法是一種多準(zhǔn)則思維的方法,該方法具有定性分析和定量分析相結(jié)合的特點(diǎn),能對(duì)目標(biāo)結(jié)構(gòu)復(fù)雜、必要數(shù)據(jù)間關(guān)聯(lián)缺乏的復(fù)雜問題進(jìn)行層次化、數(shù)量化分析,通過建立層次結(jié)構(gòu)模型、進(jìn)行一系列矩陣運(yùn)算等,達(dá)到對(duì)這類復(fù)雜問題進(jìn)行科學(xué)合理的有效評(píng)估目的。本文旨在通過研究單站紅外探測(cè)設(shè)備給出的目標(biāo)信息,采用層次分析法對(duì)紅外多目標(biāo)進(jìn)行威脅等級(jí)評(píng)估研究,提高設(shè)備的作戰(zhàn)效能[6~7]。
2 影響紅外多目標(biāo)威脅等級(jí)評(píng)估的主要因素
針對(duì)紅外探測(cè)設(shè)備的目標(biāo)信息,從以下六個(gè)方面分析紅外目標(biāo)各影響因素與紅外目標(biāo)威脅等級(jí)的關(guān)系。
1)舷角。掠海飛機(jī)對(duì)艦艇水線以下部位的打擊給艦艇的安全造成極大威脅,來襲目標(biāo)的舷角越接近90°或270°威脅等級(jí)越大。當(dāng)目標(biāo)舷角為θ時(shí),不同來襲目標(biāo)的舷角威脅等級(jí)屬性可用|sinθ|來代替。
2)舷角角速度。舷角角速度變化越小威脅等級(jí)越大。
3)高低角。零度角左右為掠海飛機(jī),對(duì)艦船的威脅等級(jí)很大。
4)高低角速度。高低角速度越大,威脅等級(jí)越大。
5)灰度。灰度越大,目標(biāo)威脅等級(jí)越大。
6)灰度變化率。灰度變化率越大,說明目標(biāo)運(yùn)動(dòng)越快,威脅也越大。
3 建立AHP模型基本步驟[8~11]
1)建立層次結(jié)構(gòu)模型
通過研究紅外探測(cè)設(shè)備探測(cè)到的目標(biāo)參數(shù),確定了用于目標(biāo)威脅等級(jí)評(píng)估的六個(gè)主要影響因素(舷角、舷角角速度、高低角、高低角速度、灰度、灰度變化率),建立紅外多目標(biāo)威脅等級(jí)評(píng)估層次結(jié)構(gòu)模型,如圖1所示。
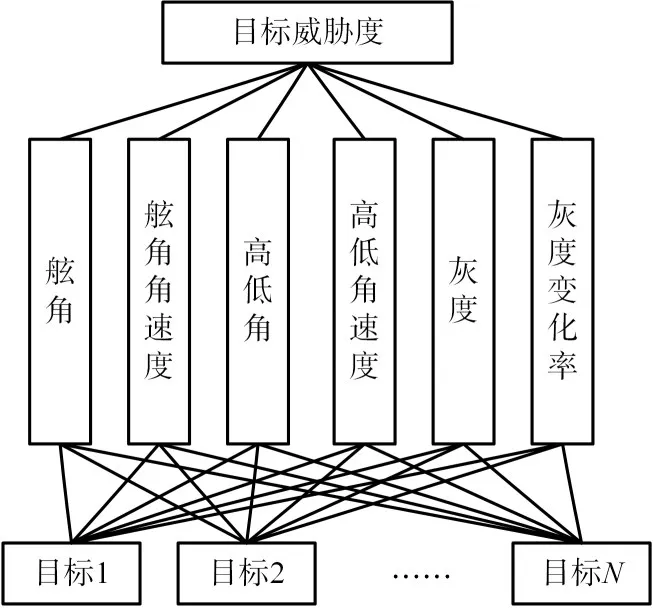
圖1 紅外多目標(biāo)威脅等級(jí)評(píng)估層次結(jié)構(gòu)模型
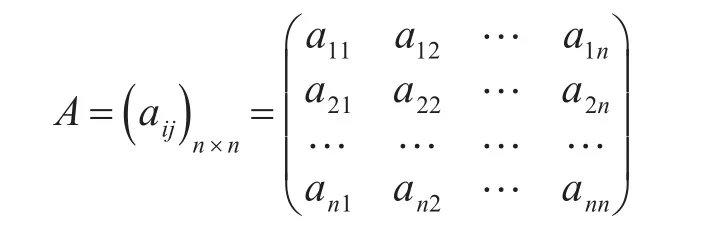
2)構(gòu)造成對(duì)判斷矩陣
成對(duì)判斷矩陣元素值表示的是準(zhǔn)則層所支配的目標(biāo)層各個(gè)目標(biāo)之間針對(duì)某一準(zhǔn)則的相對(duì)重要性。用aij表示第i個(gè)因素相對(duì)于第j個(gè)因素的比較結(jié)果,采用Saaty提出的九標(biāo)度法[12]構(gòu)造紅外目標(biāo)屬性的成對(duì)判斷矩陣A。
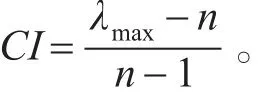
3)計(jì)算單排序權(quán)向量及一致性檢驗(yàn)
隨機(jī)一致性指標(biāo)尺的值如表1所示。

表1 隨機(jī)一致性指標(biāo)RI數(shù)值
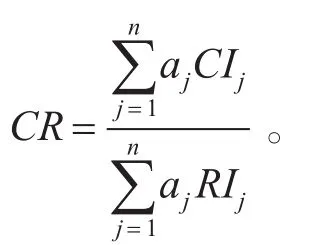
4)計(jì)算總排序權(quán)向量及一致性檢驗(yàn)
4 應(yīng)用舉例
假定紅外探測(cè)設(shè)備發(fā)現(xiàn)6個(gè)來襲目標(biāo),目標(biāo)數(shù)據(jù)如表2所示。

表2 來襲紅外目標(biāo)數(shù)據(jù)
1)確定紅外目標(biāo)屬性權(quán)重向量
定性分析紅外目標(biāo)各屬性在威脅等級(jí)評(píng)估中的相對(duì)重要程度,通過專家調(diào)查法及九標(biāo)度法進(jìn)行處理。咨詢多位長(zhǎng)期在該領(lǐng)域從事相關(guān)工作的專家,確定成對(duì)判斷矩陣并求得各屬性的權(quán)重vi,如表3所示。
根據(jù)以上成對(duì)判斷矩陣,可以求得最大特征根λmax=6.1854,進(jìn)行一致性檢驗(yàn)。

當(dāng)n=6時(shí),RI值查表可知為1.24,則一致性檢驗(yàn)值為
CR=CI/RI=0.03708/1.24=0.0299<0.1,滿足一致性要求。
該成對(duì)判斷矩陣最大特征根對(duì)應(yīng)的特征向量經(jīng)過歸一化處理,即得目標(biāo)各屬性的權(quán)重向量為V=(0.3966 0.2472 0.1616 0.1072 0.0554 0.032)

表3 成對(duì)判斷矩陣
2)確定各目標(biāo)屬性下的判斷矩陣及其相對(duì)權(quán)重向量。
在判斷矩陣建立過程中,高低角數(shù)據(jù)及舷角要經(jīng)過合理化轉(zhuǎn)換后,才用于判斷矩陣的建立。其中高低角轉(zhuǎn)換時(shí),以一組目標(biāo)中高低角最小的值為基準(zhǔn)進(jìn)行轉(zhuǎn)換;舷角用角度正弦的絕對(duì)值代替。
以屬性高低角下的判斷矩陣建立為例,首先將高低角數(shù)據(jù)進(jìn)行轉(zhuǎn)換,轉(zhuǎn)換后表2中所示目標(biāo)的高低角數(shù)據(jù)變?yōu)椋?.03,0.56,0.36,0.19,0.045,0.05),據(jù)此建立的關(guān)于高低角屬性的判斷矩陣如表4所示。
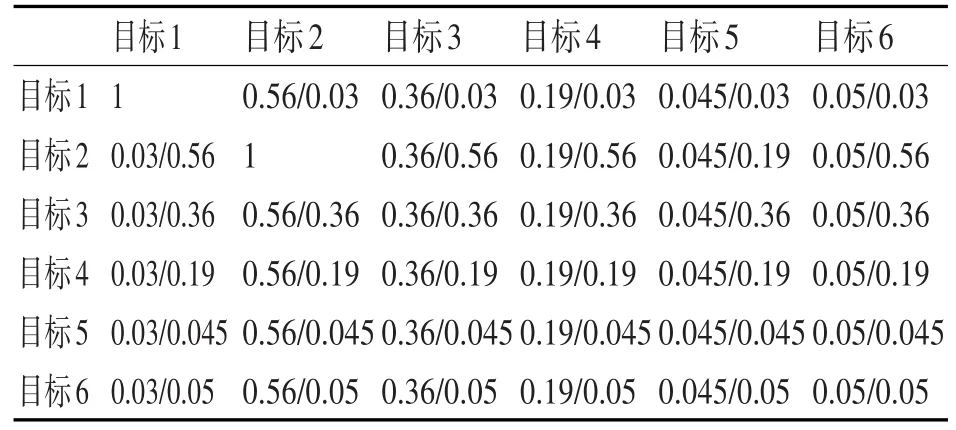
表4 高低角屬性下的判斷矩陣
計(jì)算可得高低角屬性下目標(biāo)的相對(duì)權(quán)重w3為w3=(0.3904 0.0209 0.0325 0.0616 0.2603 0.2342)T
同樣方法可求得其余幾個(gè)目標(biāo)屬性下的相對(duì)權(quán)重向量為
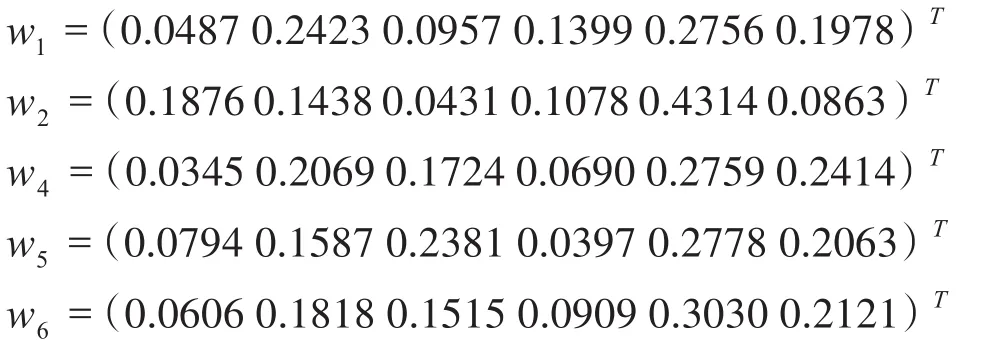
可得這6個(gè)目標(biāo)在各屬性下的相對(duì)權(quán)重矩陣為

3)總的威脅等級(jí)評(píng)估向量M的求取
當(dāng)求得紅外目標(biāo)各屬性間的相對(duì)權(quán)重向量和紅外目標(biāo)數(shù)據(jù)在各屬性下的相對(duì)權(quán)重矩陣后,即可求得該組目標(biāo)的威脅等級(jí)評(píng)估矩陣M為
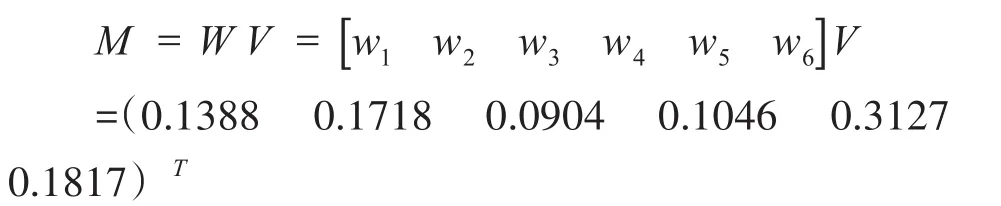
由向量M值可知,這6個(gè)紅外目標(biāo)的威脅等級(jí)大小關(guān)系為
目標(biāo)5>目標(biāo)6>目標(biāo)2>目標(biāo)1>目標(biāo)4>目標(biāo)3
5 結(jié)語(yǔ)
針對(duì)紅外多目標(biāo)威脅等級(jí)評(píng)估問題,本文提出一種基于層次分析法的目標(biāo)威脅評(píng)估方法。基于紅外目標(biāo)數(shù)據(jù)的六個(gè)屬性,利用層次分析法定性與定量相結(jié)合的特點(diǎn),解決紅外目標(biāo)各屬性間彼此獨(dú)立而造成的威脅等級(jí)評(píng)估困難問題。經(jīng)研究,紅外多目標(biāo)威脅等級(jí)評(píng)估是符合層次分析法原理的應(yīng)用實(shí)例,利用層次分析法原理建立紅外多目標(biāo)威脅等級(jí)評(píng)判準(zhǔn)則是科學(xué)、合理、切實(shí)可行的。
