基于分層式控制器的純電動汽車車距控制研究
2021-02-28 14:21:32張新鋒陳建偉王奧特
重慶理工大學學報(自然科學) 2021年1期
關鍵詞:模型
張新鋒,陳建偉,王奧特
(1.長安大學 汽車運輸安全保障技術交通行業重點實驗室,西安 710064;2.長安大學 汽車學院,西安 710064)
近年來,隨著交通擁堵和環境問題的日益突出,智能化和電動化成為汽車領域的研究熱點。縱向車距控制系統作為智能車輛的重要研究內容,是實現全自動駕駛的基礎[1]。目前的研究主要包括車距控制算法以及跟車間距策略,其中常見的控制算法有經典PID控制[2]、基于二次車距模型的非線性解耦控制律[3]、基于固定車距模型的滑模變結構控制律[4]以及搭建車間時距模型的線性二次型控制律[5]等;跟車間距模型是實現車輛安全行駛的重要組成部分,主要有安全跟隨距離(TGFD)模型[6]、最小車距安全距離模型[7]等。通過分析,目前的控制器大多采用單一的智能控制算法,對適用于多工況的純電動汽車車距控制系統的研究還比較少,并且缺少針對不同車速的可變安全距離模型。
基于此,建立了純電動汽車動力學模型,針對不同工況,搭建了一種可變安全距離模型,并采用分層式控制結構,將控制器分為頂層控制器和底層控制器,基于Carsim/Simulink聯合仿真平臺,實現智能車輛在起停工況、定速巡航、距離保持工況下的車距控制。
1 純電動汽車動力學建模
純電動汽車的車距控制研究需要搭建整車動力學模型,基于Carsim傳統燃油車模型,在Simu link建立驅動電機模型,導入到整車模型中。
1.1 驅動電機的選取
目前,車用驅動電機主要有直流電機、交流異步電機、開關磁阻電機和永磁無刷直流電機等。其中,直流電機功率密度低、轉速低、效率較低;交流異步電機發熱較為嚴重,控制比較復雜;開關磁阻電機電磁轉矩脈動較大,低速電流波動大,控制電路復雜[8];而永磁無刷直流電機轉速高、體積小、控制簡單并且在低轉速時輸出較大轉矩。因此,選取永磁無刷直流電機作為車用電機。
1.2 驅動電機動力參數確定
電機提供車輛行駛的動力,為滿足車輛加速性能、最大速度和最大爬坡度,應選取合適的功率、轉矩和轉速等參數[9]。
根據表1的車輛性能指標,結合Carsim中A級車的參數,對驅動電機動力參數進行匹配計算,本文選取額定功率PExtra取值為22 kW。最大功率Pm=55 kW。取電機最大轉矩Tmax=200 N·m。額定轉矩Textra=80 N·m。電機最大轉速nm=6 200 r/min,額定轉速ne=2 700 r/min。

表1 整車性能指標
1.3 驅動電機數學模型
對驅動電機進行數學建模,簡化電機工作過程和自身結構中鐵芯飽和、剩磁干擾的影響;忽略電機邊緣磁通量的影響;并且假設定子上的三相繞組的安裝方式是對稱星狀,即電機的線電流等于各繞組相電流。
因此電壓方程為

式中:L和M 為定自繞組自感系數和互感系數;ei、ii和ui為相電動勢(i取A、B、C)、相電流和相電壓;R為繞組電阻。
轉矩方程和目標轉矩方程為

式中:Te和Tm為電磁轉矩和目標轉矩;i和im為電機的輸入電流和目標電流;K為電磁轉矩系數;ω為電機轉角速度。
運動方程為:

式中:T為機械負載轉矩;J為轉動慣量。
因PI控制控制精度高且控制方式簡單,對電機的控制采用簡單的PI控制。電機工作的目標電流im和負載兩端的電壓u分別為:

式中:Kp1、Kp2和Ki1、Ki2分別為目標電流和負載電壓的比例系數和積分系數。
當電機處于工作狀態時,可以將其視為一相是斷開的,假設A相斷開時的負載電壓為

式中,Ke為反電動系數,Keω=2eE。
根據上述數學模型,在Simulink中得到電機模型。
1.4 整車動力學模型
對傳統的動力傳動裝置進行改裝,切斷發動機模型的動力輸入,通過外部接口連接電機模型實現電機驅動,其他模型參數均采用某款A級純電動汽車默認值,如表2所示。

表2 車輛部分參數
2 安全距離模型的搭建
安全距離模型影響整個車距控制系統的控制效果,本文中對典型的安全距離模型進行改進,提出了一種考慮極端條件和制動器起作用時間的可變安全距離模型。
2.1 典型安全距離模型
1)固定安全距離模型。一種預先設定的距離模型,根據本車車速選取相對應的安全距離。該算法沒有考慮駕駛員特性和前車行駛狀態,缺乏靈活性[10]。
2)自由滑行時間模型。以預先設定好的滑行時間作為參數,vS為自車車速,tS為自由滑行時間,模型[11]可表示為:

式中:DS為安全距離;L為停車間距,常數L決定安全距離的取值。對于復雜工況(起步-停車等),模型精度較差。
3)駕駛員預估安全距離模型。根據駕駛員的駕駛經驗,估計自車與目標車輛的相對速度與相對距離,模型[12]可表示為:

式中:vC為兩車相對速度;tC為估計時間;af為跟蹤車輛減速度;e為兩車完全停止時的最小安全距離。該模型中m的取值取決于駕駛員個人主觀感受。估計時間tC的確定也較為困難,導致精確性不夠。
4)車間距保持安全距離模型。該模型也是通過預先設定好的參數對安全距離進行計算。沒有考慮到VCU(vehicle control unit)發出指令到車輛開始減速的時間,容易在極端情況下發生追尾碰撞。
綜上所述,安全距離模型的建立必須考慮極端條件和制動器起作用時間,確保智能車輛安全行駛。
2.2 可變安全距離模型
安全距離模型直接決定自車前車之間的最小行車距離[13]。根據測量到的兩車間的實際距離以及安全距離,對車距進行精準控制。安全距離模型考慮本車的行駛狀態、制動器起作用時間的同時,還需要跟蹤車輛的實時行駛信息。基于此,本文采用考慮了制動反應時間,建立的可變安全距離模型:

式中:S為安全距離;vC、vT分別為自車車速和前跟蹤車輛車速;t為控制器反應時間;d為兩車停止時的最小安全距離;amin為自車的最小加速度。其中,參數t、d、amin根據研究車輛的不同而變化。本文中分別取制動器反應時間t為0.8 s,最大制動減速度amin為 -5.5 m/s2,兩車停止時的最小安全距離約為本車車長[14],d取值為3 m。將其代入式(10),可得安全距離模型:

在極端情況下,即前車制動時,兩車最有可能發生追尾碰撞,此時前車速度vT為零。根據式(11),此時的安全距離模型表示為:

3 控制器的設計
采用分層式控制結構,將控制器分為頂層控制器和底層控制器。基于線性二次型最優控制理論設計頂層控制器,輸出自車的期望加速度。底層控制器通過驅動/制動控制切換策略,將期望加速度進行分配,對車輛的驅動和制動進行相應控制,達到車距控制的目的。
3.1 基于LQR的距離保持頂層控制器
LQR(linear quadratic regulator)最優控制算法可表示為線性系統,并且易于構成閉環最優控制,其性能指標是由對象狀態和加權值組成的二次型函數。基于LQR設計的距離保持頂層控制器利用車載傳感器探測到的距離和速度信息以及搭建的安全距離模型,可以得到自車的期望加速度。
根據車載傳感器探測到的信息可以得到自車和前車的相對速度和加速度的傳遞特性關系


其中,控制誤差為自車和前車的期望距離與實際距離的差值,表達式為:

式中:e(t)為控制誤差;ddes(t)、ζ(t)分別為兩車的期望車距和實際車距。取控制器性能指標J:

式中:qe、ru分別為控制誤差和控制量的加權值。通過最優控制,使性能指標最小。根據最優跟蹤問題的求解方法可以將公式表達為:

式中,k1、k2、k3為狀態反饋系數,控制器的性能由qe、ru確定,其中跟蹤性能由qe確定,控制器的控制能量消耗由ru確定,即以較小的加速度變化對前車進行跟蹤。
根據車輛的行駛特性,假設qe、ru正定,即qe>0,ru>0,通過黎卡提代數方程的求解,取誤差加權值qe=1,控制量加權值ru=7。可以得到反饋系數k1、k2和k3分別為0.216 2、1.624 3和0.682 4。根據式(18)可求得期望加速度:

為了保證乘坐舒適性,需要對期望加速度進行控制。參考目前車輛加速度取值范圍,本文的速度大小為[-5.5 3.5]m/s2。在Simulink中仿真過程如圖1所示。
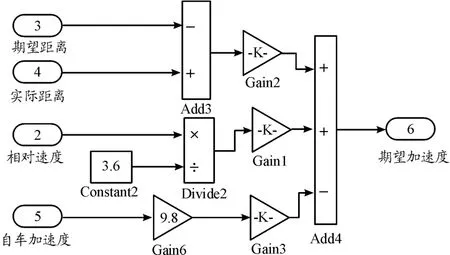
圖1 線性二次型最優控制理論Simulink仿真過程示意圖
3.2 定速巡航頂層控制器
當目標車速大于巡航速度或者兩車間距大于期望間距時為定速巡航模式,基于PID控制理論設計出定速巡航控制器,使車輛按照設定的速度穩定行駛。
es(t)為設定的巡航速度vdes和車輛實際速度vact之差:

將速度誤差es(t)作為控制器的輸入,期望加速度ades作為輸出,控制車輛按照期望加速度行駛。PID頂層控制器的比例系數取值為1.6,積分系數取值0.4,微分系數取值0.01。仿真過程如圖2所示。

圖2 PID控制器Simulink仿真過程示意圖
3.3 驅動/制動切換策略
由頂層控制器得到的期望加速度為依據,對車輛采取驅動或制動控制,考慮到車輛的經濟性和乘坐舒適性,兩者不能頻繁切換,因此應設定一個過渡區域。根據實踐經驗,過渡區域寬度為2Δh,Δh一般為0.1 m/s2。由期望加速度ades制定出驅動/制動的切換策略。如下:
1)當ades≥a+Δh時,對自車進行驅動控制,無制動力作用。
2)當a-Δh<ades<a+Δh時,為過渡區域,不對驅動和制動進行切換。
3)當ades≤a-Δh時,對自車進行制動控制,無驅動力作用。
依據上述驅動/制動切換策略,可以把頂層控制器得到的期望加速度合理地分配給驅動模塊或制動模塊。切換策略在Simulink上進行仿真,其過程如圖3所示。

圖3 驅動/制動控制切換策略Simulink仿真過程示意圖
3.4 底層控制器設計
根據切換策略判定,當自車驅動時,以車輛安全性為首要目標,具有基于模糊控制的驅動控制器。在自車制動時,根據縱向動力學模型對被控車輛進行制動。
3.4.1 基于模糊控制的驅動控制器設計
將二維模糊控制器作為驅動控制器,其中輸入量為加速度誤差及誤差變化,輸出量為車輛需要的期望轉矩。定義加速度誤差、加速誤差變化和期望轉矩的語言變量轉化為7個模糊集合,語言變量值分別為

其中,NB為負小,NM為負中,NB為負大,ZO為零,PS為正小,PM為正中,PB為正大。
在車輛行駛過程中,需要自車有較好的響應速度,故設計的模糊控制器輸入和輸出變量選用三角形隸屬度函數(Trimf)。經過對模糊規則反復調試和驗證,建立了底層驅動模糊控制規則(見表3),共49條規則。

表3 驅動模糊控制規則
通過建立的模糊控制規則,采用Matlab內的三維圖分析輸入與輸出之間的關系,如圖4所示。2個輸入變量化的模糊論域范圍為[-5.5 3.5]和[-1 1],輸出變量的模糊論域范圍為[0 20]。

圖4 模糊控制輸入變量和輸出變量三維圖
采用Mamdani推理,Simulink仿真模型如圖5所示。
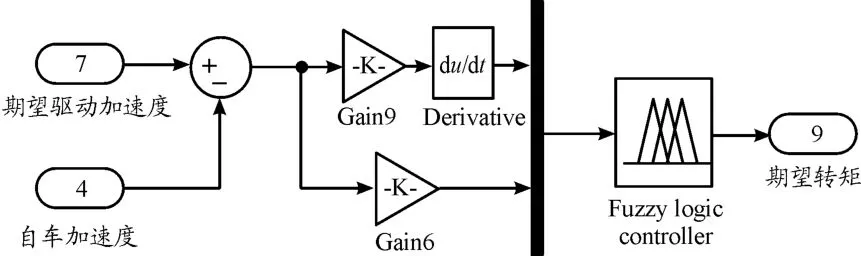
圖5 模糊驅動控制器仿真模型示意圖
3.4.2 基于縱向動力學模型的制動控制
制動控制過程中,由期望減速度求得制動主缸的期望制動壓力,將期望制動壓力作用在車輪上,控制車輛減速行駛。
根據車輛動力學分析可知,在良好的水平道路上勻速行駛時,受到的行駛阻力為:

式中:Ff為滾動阻力;Fw為空氣阻力。
可由式(22)表示:

在制動過程中,當車輪的附著率小于等于地面附著系數時,期望制動壓力可以由式(23)表示:

式中,pdes為期望制動壓力。
求得期望制動壓力為:

縱向制動控制Simulink仿真模型,如圖6所示。

圖6 縱向制動力矩Simulink仿真模型示意圖
4 仿真驗證
基于Carsim/Simulink聯合仿真平臺,對不同工況進行仿真,驗證了安全距離模型以及分層式控制器對車距控制的有效性和魯棒性。
4.1 Carsim/Simulink聯合仿真模型
將Carsim軟件的外部接口與Simulink中的控制模型進行聯合,車輛動力學模型的輸入變量為驅動力矩與制動主缸力矩,輸出變量為自車速度、加速度以及兩車相對速度與距離。模型輸出作為頂層控制器的輸入,進而得到車輛的期望加速度,將其作為底層控制器的輸入,實現對車輛的控制。聯合仿真模型如圖7所示。

圖7 Carsim/Simulink聯合仿真模型示意圖
4.2 跟車起停仿真分析
仿真環境為附著系數0.85的良好路面,自車與前車的初始距離為8 m。仿真結果如圖8、9所示。

圖8 自車速度與前車速度

圖9 期望距離與實際距離
實驗過程中,自車速度由靜止加速到9 km/h,經過3 s與前車速度持平,自車車速與前車速度變化趨勢基本保持一致,兩車停止時,自車停止在距前車2 m的安全位置。因此,對于跟車起-停工況,速度響應較快,能夠保持安全行駛距離,控制器有較好的效果和魯棒性。
4.3 定速巡航仿真分析
定速巡航是指車輛按照設定速度穩定行駛,主要分為加速、減速2種巡航模式。
1)低速變高速巡航
車輛起始初速度為40 km/h,設定80、100、110 km/h 3種期望速度,仿真結果如圖10、11所示。

圖10 期望車速和實際車速

圖11 100 km/h時加速度
仿真開始時,自車以40 km/h的初速度加速行駛,在4、6、7 s時達到不同的期望車速,并穩定行駛至結束,實際加速度和期望加速度變化趨勢基本一致。因此,控制器對低速變高速巡航有較好的控制效果和魯棒性。
2)高速變低速巡航
車輛初始速度為110 km/h,設定期望速度為70、50、30 km/h。仿真結果如圖12、13所示。

圖12 期望車速和實際車速
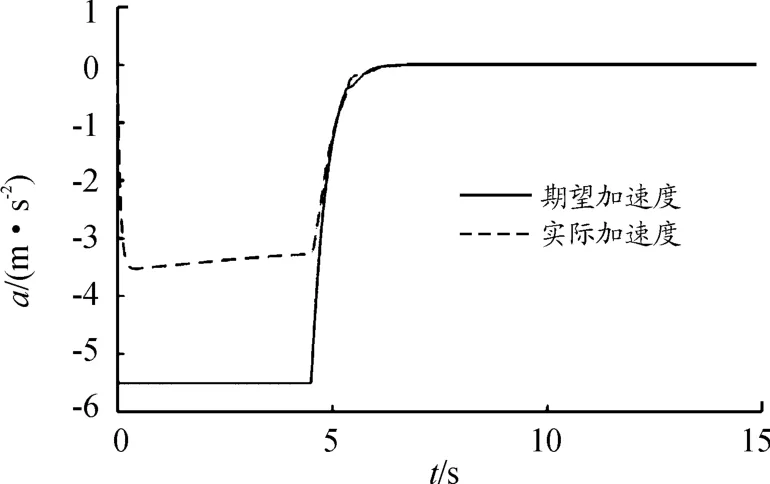
圖13 50 km/h期望加速度和實際加速度
仿真開始時,自車以110 km/h的初速度按照期望速度減速行駛,在3、5、7 s時達到不同的期望速度,并穩定行駛至結束,實際加速度和期望加速度變化趨勢基本一致。綜上所述,控制器對低速變高速巡航同樣有較好的控制效果和魯棒性。
4.4 距離保持仿真分析
距離保持工況是指自車與前車保持一定安全距離,跟隨前車行駛。距離控制的前提是目標車輛車速低于車輛的巡航速度。根據車速不同分成低速跟蹤工況和高速跟蹤工況。
1)低速跟馳
低速跟蹤工況適用于城市工況行駛,仿真起始兩車實際距離20 m,自車初始速度15 km/h,前車初始速度10 km/h,進行2次加速、減速之后,穩定在20 km/h。
仿真結果如圖14、15所示,自車速度與前車速度變化趨勢一致,兩車的實際距離在期望距離附近波動,波動誤差小于0.3 m,控制器能夠在保持距離的前提下,控制車輛安全穩定地跟隨前車,滿足低速跟蹤工況的需求。

圖14 前車速度和實際速度

圖15 期望距離與實際距離
2)高速跟馳
高速跟蹤工況適用于車流量較少的高速工況,仿真起始兩車實際距離為40 m,自車初始速度為70 km/h,前車初始速度為60 km/h,進行2次加速、減速,穩定在70 km/h。
仿真結果如圖16、17所示,自車速度與前車變化趨勢一致,兩車的實際距離始終在期望距離附近波動。表明,控制器具有較好的控制效果和魯棒性,滿足高速跟蹤工況的需求。

圖16 前車速度和實際速度

圖17 期望距離與實際距離
5 結論
1)基于Carsim/Simulink平臺,對驅動電機模型進行選取,并建立純電動汽車動力學模型。
2)對典型的安全距離模型進行改進,提出了一種考慮極端條件和制動器起作用時間的可變安全距離模型。
3)采用分層式控制結構對控制器進行設計,設計了以LQR控制理論為基礎的車距保持頂層控制器,基于PID控制的車輛巡航頂層控制器。通過建立的驅動/制動切換策略,將期望加速度傳遞給基于模糊理論的底層控制器或基于動力學數學模型的制動控制。
4)針對起、停工況定速,巡航工況和距離保持工況進行車距控制的仿真驗證。結果表明:搭建的安全距離模型和分層式控制器具有較好的控制效果和魯棒性,使車輛能夠安全穩定行駛。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19