基于同步提取變換和DRSN的滾動軸承故障診斷研究
2021-02-28 14:22:18陳志剛趙志川
重慶理工大學學報(自然科學) 2021年1期
趙 杰,陳志剛,2,趙志川,張 楠,2
(1.北京建筑大學 機電與車輛工程學院,北京 100044;2.北京市建筑安全監測工程技術研究中心,北京 100044)
隨著科技的發展,工業設備逐漸趨于大型化、自動化,大型旋轉機械設備在工業生產生活中扮演的角色愈發重要。滾動軸承作為旋轉機械設備的重要部件,其工作狀態直接影響旋轉設備的運行,一旦發生故障,輕則設備停機,重則發生事故,造成人員傷亡。由于軸承運行工況的復雜性,采集的振動信號中所含噪聲激勵相互摻雜,使得故障特征的提取非常困難[1]。準確的滾動軸承故障診斷,能夠用來安排維修計劃、延長服役壽命和確保人身安全。
現有的故障診斷算法可以分為兩類:一類是基于現代信號處理的診斷方法;另一類是基于深度學習的診斷方法。一般來說,基于現代信號處理方法通過檢測采集的振動信號,來分辨與故障相關的振動成分或特征頻率,進而確定故障類型[2]。在信號處理方法中,有小波分析、Wigner Ville分布、盲源分離、Hilbert Huang變換、變分模態分解、同步擠壓變換等。但由于時頻分辨率不高等缺點,Yu等[3]提出同步提取變換,通過提取時頻脊線能量,可大大提高時頻分辨率,但存在直接提取特征不準確的問題。
目前,隨著計算機性能的提升,深度學習方法逐漸應用到軸承故障診斷中來。周興康[4]利用深度神經網絡,提出殘差卷積自編碼器,用于齒輪箱振動信號特征提取,顯著提高診斷率。趙曉平等[5]提出多任務深度學習診斷方法,對軸承及齒輪2種目標同時進行診斷,大大提高診斷效率。Ma等[6]將深度殘差網絡與解調之后的時頻特征進行融合,并應用到了不穩定工況下的齒輪箱診斷。Zhao[7]通過在DRN中加入自適應閾值,提出深度殘差收縮網絡,可在強噪聲中提取故障特征。但是信號直接加入殘差網絡容易造成準確度不佳、網絡層數加大、難以運算等問題。
針對以上優點及不足,本研究將同步提取變換及深度殘差收縮網絡結合,并運用到軸承故障診斷中。首先將采集的振動信號通過同步提取算子得到時頻圖,然后輸入殘差網絡訓練模型,進行故障特征識別。
1 SET變換理論
1.1 SET變換
同步提取變換(synchronous extraction transfor mation,SET)通過其提取算子(SEO),剔除時頻脊線發散的能量[3],僅保留脊線上的時頻系數,振動信號所含噪聲大大減少,從而具有較高的噪聲魯棒性。
假設一個諧波信號為s(t),頻域為:

式(1)中:ξ為頻率;δ()為指示函數。
因同步提取變換基于短時傅里葉變換重排,對其做STFT得:

式(2)中:Ge(t,ω)為短時傅里葉變換的時頻譜;^g(ω-ω0)為窗函數g()的傅里葉變換。
為得到Ge(t,ω)的瞬時頻率,首先需要對其求解偏導數,即:

對于任何(t,ω)且Ge(t,ω)≠0,則可得STFT變換結果的瞬時頻率為:

在SET算法中,要實現理想時頻分析,需僅保留時頻脊線上的能量,將其余發散的能量剔除,達到高時頻分辨率的目的。采用 δ()函數來實現,即:

式(5)中,δ(ω-ω0(t,ω))為同步提取算子(SEO)。
1.2 信號分析
SET算法是利用提取算子(SEO)對時頻脊線上的能量進行提取,可利用脊線重建公式對其所含有效信息進行重構。
對s(t)而言,有:

得到瞬時頻率后,即可進行重建。

式(7)中:Re()表示對Te取實部;r(t)為瞬時頻率
為驗證SET的效果,進行仿真信號實驗驗證。假設仿真信號S(t)為:

則仿真信號SST變換和SET變換時頻圖如圖1所示。
由圖1可知,SST變換的時頻譜比較模糊,其分辨率較低,存在能量發散現象;而SET通過同步提取算子(SEO)剔除了發散能量,保留了時頻脊線上的能量,分辨率較高。

圖1 仿真信號SST和SET變換時頻圖
2 深度殘差收縮網絡DRSN
2.1 深度殘差網絡
深度殘差網絡是卷積神經網絡(CNN)的一個新穎延伸,相較于傳統的小波分析,深度學習算法(尤其是卷積神經網絡)可以自動地學習所需要的濾波器,在一定程度上解決了構建合適濾波器的問題。深度殘差網絡ResNet是一種改進的卷積神經網絡,通過引入跨層連接,降低了模型訓練的難度。殘差學習結構如圖2所示。

圖2 殘差學習結構示意圖
對于一個堆積層結構,當輸入為x時,學習到的特征為H(x),希望其可以學習到的殘差F(x)=H(x)-x,那么殘差學習就比直接特征學習更加容易[8]。
在跨層連接shortcut作用下,網絡參數的訓練難度大幅降低,從而更容易訓練出效果很好的深度學習模型,解決了CNN模型難以訓練的問題。ResNet模型通常含有許多基本的殘差模塊,通過這些模塊組成了ResNet的核心部分[9]。
如圖3所示,殘差模塊包含了2個批標準化、2個整流線性單元、2個卷積層和1個恒等路徑。恒等路徑是讓深度殘差網絡優于卷積神經網絡的關鍵[7]。圖3(a)~(c)分別為3種殘差模塊,圖3(d)是深度殘差網絡的整體示意圖,包括一個輸入層、一個卷積層、一定數量的殘差構建模塊、一個批標準化、一個ReLU激活函數、一個全局均值池化和一個全連接輸出層。其中:BN指的是批標準化(batch normalization),ReLU指的是整流線性單元激活函數(rectifier linear unit),Con指的是卷積層(convolutional layer),identity shortcut指跨層的恒等映射,RBU指的是殘差模塊(residual building Unit),GAP是全局均值池化(global aver age pooling),FC是全連接層(fully connected lay er)。C表示特征圖的通道數,W表示特征圖的寬度,在Conv后的括號中,K表示卷積層中卷積核的個數。當K=C時,輸出特征圖的通道數為C,當K=2C時,輸出特征圖的通道數為2C/2,表示的是卷積核每次移動的步長為2,從而使得輸出特征圖的寬度減半。
在圖3(a)中,輸入特征圖的尺寸為C×W×1,輸出特征圖的尺寸也是C×W×1,也就是說,特征圖的尺寸保持不變。在圖3(b)中,輸出特征圖的尺寸減小為C×(0.5W)×1,換言之,寬度減小為原先的一半。在圖3(c)中,輸出特征圖的尺寸變為2C×(0.5W)×1,即不僅寬度減小為原先的一半,而且通道數增加了1倍。

圖3 殘差模塊及整體網絡示意圖
2.2 深度殘差收縮網絡
根據Zhao等[7]的研究,采用通道間共享閾值的深度殘差收縮網絡對DRN進行改進,如圖4所示。
在改進后的殘差模塊中,不僅有一個軟閾值化函數作為非線性層,而且嵌入了一個子網絡,通過注意力機制,用于自動地設置軟閾值化所需要的閾值,如圖5所示。
通過這種方式,用這個子網絡學習得到一組閾值,對特征圖的各個通道進行軟閾值化。這個過程其實可以看成是一個可訓練的特征選擇的過程。具體而言,就是通過前面的卷積層,將重要的特征轉換成絕對值較大的值,將冗余信息所對應的特征轉換成絕對值較小的值;通過子網絡學習得到二者之間的界限,并且通過軟閾值化將冗余特征置為零,同時使重要的特征有著非零的輸出。

圖4 深度殘差收縮網絡示意圖
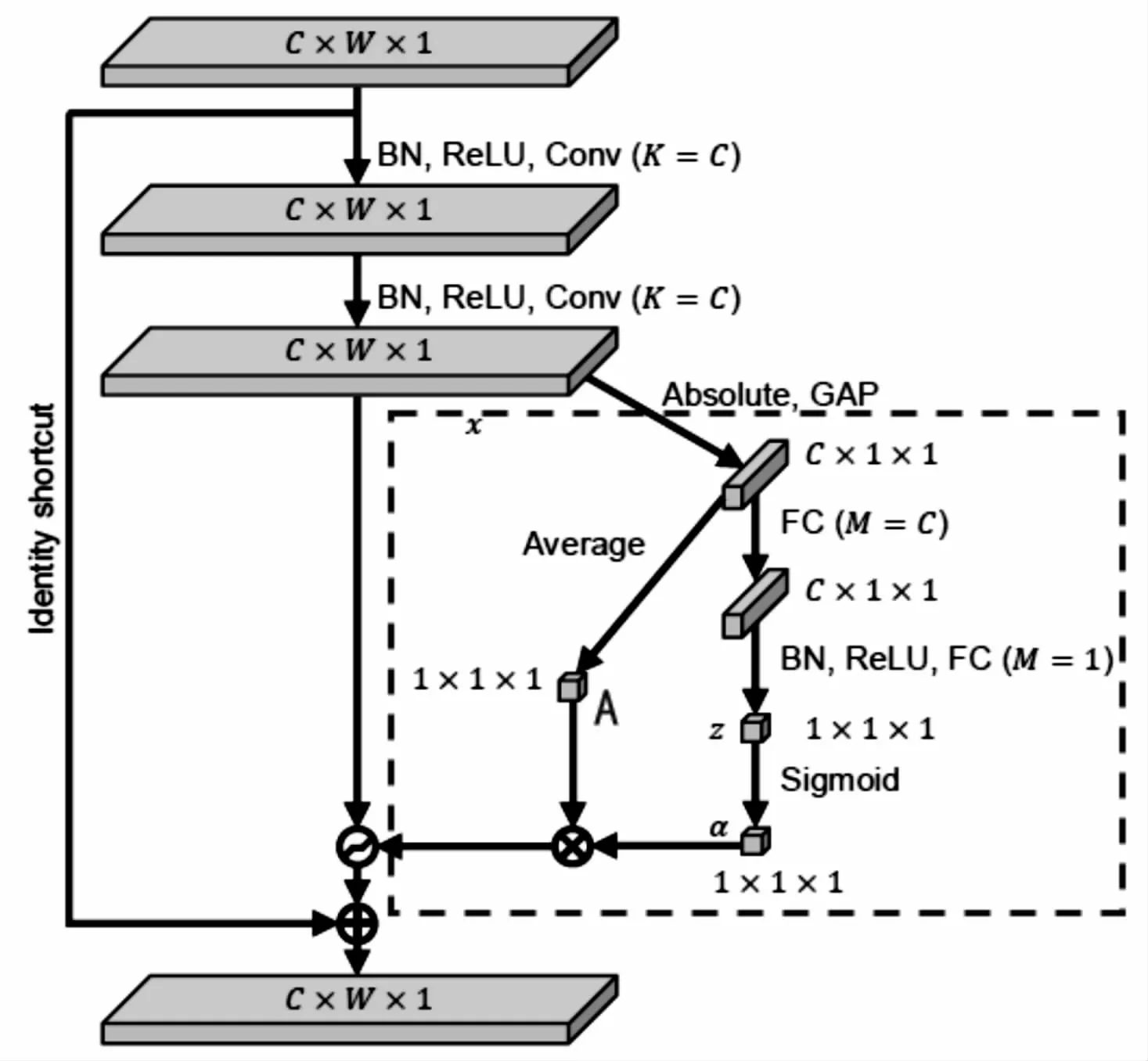
圖5 自動閾值設置示意圖
3 基于SET和DRSN的故障診斷
本文構建了基于SET和DRSN的軸承故障診斷模型。首先將采集到的振動信號進行SET變換,利用同步提取算子SEO對時頻脊線能量進行剔除,得到清晰的時頻圖,然后對其做灰度和歸一化處理,輸入DRSN網絡。流程如圖6所示。
4 實例分析
為驗證SET和DRSN故障診斷方法的實用性,本文在實驗室搭建實驗平臺(如圖7所示),模擬軸承運行工作狀態。比較常見的故障有內圈、外圈及滾動體故障,本文參考美國西儲大學實驗做法,利用電火花加工技術人為模擬軸承故障狀態,并采用壓電式加速度傳感器在軸承的水平和垂直方向進行安裝。其中采樣頻率為25.6 kHz,外圈轉頻29.87 Hz,故障頻率98 Hz;內圈轉頻為29.87 Hz,故障頻率為147.85 Hz;滾動體轉頻19 87 Hz,故障頻率為77.38 Hz。

圖6 診斷流程框圖

圖7 實驗平臺
實驗所采集到的正常及3種故障信號的波形如圖8所示。
由圖8可以看出,信號中噪聲較多,與故障信號疊加在一起,被淹沒在噪聲中,進而傳統的診斷方法不易識別。現選取所用樣本信號的60%作為訓練集,剩余部分作為測試集進行測試[10],數據集如表1所示。

圖8 信號波形

表1 數據集
選取其中1組故障振動信號做同步提取變換和同步擠壓S變換處理,得到時頻圖像如圖9所示,由圖9可知,SET時頻圖譜線清晰,對后續提取故障特征識別具有較大幫助,而SST時頻圖譜線混雜,較難分辨。由于軸承不同部位故障各不相同,傳統靠經驗分辨故障特征難以實現,因此可用于DRSN進行故障特征識別。

圖9 時頻圖像
得到時頻圖像放入數據集,然后根據圖4網絡結構將數據集內時頻圖像進行灰度和歸一化處理,輸入DRSN網絡。訓練結果經過可視化處理如圖10所示,迭代訓練200次以后,模型的正確率在98.32%左右,顯示出了很好的效果。

圖10 識別正確率
隨著迭代次數的增加,正確識別率逐漸升高,由于網絡深度越大,效果越好,但是訓練難度就越大,受GPU限制較大,普通主機難以完成。另一方面深度越深,會產生梯度消失及過擬合現象,進而導致識別率下降。
為進一步說明診斷結果的準確性,對測試樣本識別率取均值,并與EEMD DRN、ITD PNN、CWT CNN等方法比較,診斷結果如表2所示。

表2 不同方法診斷結果
由表2可知,在時頻分辨率方面,SET方法結合了EEMD、ITD、CWT方法的特點,使得時頻分辨率大幅度提高,為后續故障特征識別創造了有利條件,并且DRSN網絡相比于其他網絡,增加了自適應閾值網絡,對于混合有復雜噪聲的信號,更能有效提取故障特征,效果較好。
5 結論
通過將同步提取變換和深度殘差收縮網絡相結合的方法,將其用于軸承故障診斷,利用同步提取變換,將振動信號發散能量通過同步提取算子SEO剔除,保留時頻脊線能量,提高時頻分辨率和DRSN網絡在強噪聲情況下故障特征識別能力高的特點,克服了傳統時頻分析方法故障特征難以有效提取的問題。通過與另外3種方法識別正確率均值的對比,識別效果較好。對于網絡深度過高、出現數據過擬合現象、網絡層數最佳值的選擇、確保準確率等問題,還有待后續進一步研究。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31