BDS衛星鐘差短期預報的LSTM算法
2021-03-01 15:43:18吉長東朱錦帥呂廣涵
導航定位學報 2021年1期
關鍵詞:模型
吉長東,朱錦帥,,黎 虎,張 萌,呂廣涵
(1. 遼寧工程技術大學 測繪與地理科學學院,遼寧 阜新 123000;2. 張家界市測繪院,湖南 張家界 427000)
0 引言
在多導航系統并存的環境下,實時衛星鐘差產品的精度直接影響到全球衛星導航系統(global navigation satellite system, GNSS)的服務能力[1-2]。我國北斗衛星導航系統(BeiDou navigation satellite system, BDS)搭載的原子鐘均為自主研發,其精度和穩定性與美國全球定位系統(global positioning system, GPS)和歐盟伽利略衛星導航系統(Galileo navigation satellite system, Galileo)的衛星鐘不同,因此,BDS鐘差產品的精度和穩定性應受到更多的關注[3]。
超快速鐘差產品作為國際GNSS服務組織(International GNSS Service, IGS)的核心產品之一,是實現分米級實時定位服務的重要一環。文獻[4-5]通過二次多項式加1個周期項擬合,預報IGS超快速產品中的GPS鐘差,但其精度與廣播星歷相比并沒有顯著改善。文獻[6]把小波神經網絡(wavelet neural network, WNN)模型應用到鐘差短期預報中,將小波分析與神經網絡結合,預報精度優于二項式模型和灰色模型。文獻[7]以WNN模型為基礎,對數據預處理方法進行改進后,以IGS發布的GPS超快速鐘差進行實驗并得到優于超快速鐘差預報部分數據的結果。文獻[8]使用徑向基函數(radial basis function, RBF)神經網絡,對GPS鐘差進行超短期5 min和1 h以及短期1 d預報,均可取得高精度預報結果。文獻[9]提出的循環神經網絡(recurrent neural network, RNN)是1種具有記憶功能的深度學習模型。文獻[10]通過修改隱藏層的結構,建立1種基于RNN的長短時記憶(long short-term memory, LSTM)模型,進而削弱了RNN在長序列訓練過程中的梯度消失和梯度爆炸問題。
目前,只有德國地學研究中心(Deutsches Geo Forschungs Zentrum, GFZ)和我國的全球連續監測評估系統(international GNSS monitoring and assessment system, iGMAS)提供開放式BDS鐘差產品,且現有的鐘差預報算法主要集中于穩定的GPS鐘差數據以及IGS發布的鐘差產品,對于BDS以及iGMAS發布的鐘差產品缺少研究。為此,針對BDS超快速鐘差,提出1種將修正1次差的鐘差預處理方法和LSTM模型相組合的鐘差短期預報方法。
1 鐘差數據預處理及LSTM預報原理
iGMAS綜合鐘差產品的時標采用北斗時(BDS time, BDT),用戶將iGMAS的BDT產品轉換到GPS時(GPS time, GPST)時,不考慮微小量可以時[11],其計算方法為

式中:涉及物理量的單位均為 s;tGPST為t時刻GPS鐘差值;tBDT為t時刻BDS鐘差值。iGMAS提供的鐘差產品具體數據如表1所示,鐘差產品精度用均方根值(root mean square,RMS)表示。

表1 iGMAS鐘差產品介紹[11]
1.1 鐘差1次差預報方法原理
為了獲得高精確度的時間信息值,原始衛星鐘差相位數據具有更多的有效位數。文獻[6]提出了對鐘差相位數據相鄰歷元間求1次差的方法,這不僅可以降低原始鐘差數據序列中趨勢項的影響,進而得到1組有效數字位數減少且數值較大的1組數據序列。設L={li,i=1,2,…,n}(li為i時刻鐘差值)為任意1組鐘差序列,對序列中2個相鄰歷元的鐘差做差,可以得到鐘差的1次差分序列ΔL={Δli,i=2,3,…,n},其中Δli=li-li-1。利用1次差分后的序列ΔL進行學習、建模并預報第n個歷元以后m(m>0)個歷元的鐘差的1次差分序列ΔLm={Δlj,j=n+1,n+2,…,n+m},最后根據預報的1次差序列求累加和與第n個歷元的鐘差值ln相加,即可得第k個歷元的鐘差相位值[6]為

式中:Δlk為預報的第k個歷元的1次差值,k=n+1,n+2,…,n+m。
1.2 基于鐘差1次差分序列的粗差處理
針對鐘差相位數據相鄰歷元間求1次差后的數據序列,文獻[12]設計了1種修正1次差法數據預處理方法,以改進中位數為基礎的抗差估計探測粗差方法:將每個鐘差1次差分數據Δli與1次差分序列的中數及絕對中位數(median absolute deviation,MAD)數倍之和進行比較,MAD可表示為

式中:kΔ為1次差序列的中間數;Median為對序列取中位數,即kΔ=Median{ΔL}。若鐘差1次差分值滿足式(4),則將其判定為異常值并剔除該值,然后通過內插或者置零的方法補充該點數據[13],即

式中:a為根據實際情況需要確定的1個正整數。
本文遵循探測出的異常值個數不超過建模數據的5%的原則,將a設置為3,這樣既在一定程度上降低異常值對模型預報性能的影響,又避免了有效信息的剔除。對于剔除數據歷元,這里使用線性插值的方法補全歷元。
1.3 循環神經網絡原理
循環神經網絡是1種可以有效提取、利用和處理時間序列的高位非線性動力學模型[14]。在循環神經網絡中,神經元不但可以接受其他神經元的信息,也可以接受自身的信息,將神經元最近1次(或幾次)的結果導入自己接下來的運算中,形成具有環路的網絡結構。設x=(x1,x2,xt)為模型輸入,y=(y1,y2,yt)為模型輸出,在1個完全連接的RNN模型中,在時刻t時,令xt表示網絡的輸入,yt表示網絡輸出,網絡模型如圖1所示。
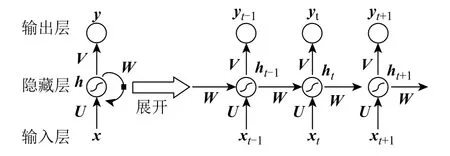
圖1 RNN模型及其展開示意圖
圖1中:h為隱藏層狀態(即隱藏層神經元的活性值,也稱之狀態或隱狀態),ht-1、ht-1為t-1、t時刻活性值;U、W和V均為網絡參數,U為狀態—狀態的權重矩陣,W為狀態—輸入的權重矩陣,V為狀態—輸出的權重矩陣。則RNN模型在時刻t的參數更新公式為:

式中:zt為t時刻隱藏層的凈輸入;b表示偏置向量;f(zt)表示非線性的激活函數。從圖1和式(5)、式(6)可以看出,t時刻隱藏層的狀態ht不僅有與時刻t的輸入xt相關,也和上一時刻隱藏層的狀態ht-1有關。
1.4 LSTM原理
在RNN實際應用中,隱藏層存儲的時間是有限的,同時梯度消失的問題也是長程時間序列預測中存在的主要問題。基于此,文獻[15]以LSTM模型為基礎,在網絡中引入1個新的內部狀態ct和門控機制,專門進行線性的循環信息傳遞,同時(非線性的)輸出信息給隱藏層的外部狀態th。在t時刻,內部狀態tc的公式計算為:
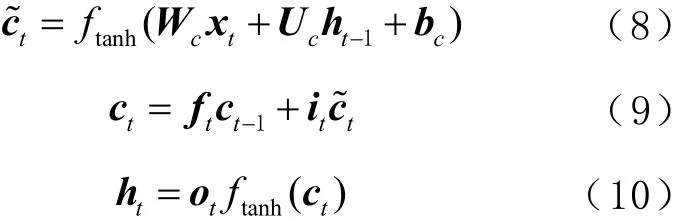
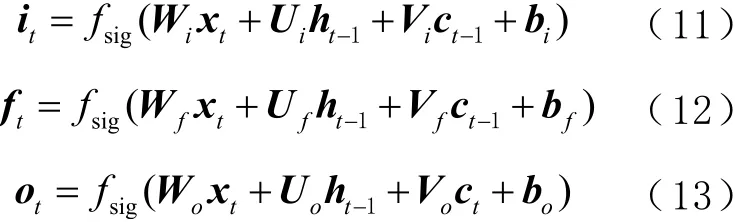
式中fsig為sigmoid型激活函數。
2 鐘差預報的LSTM模型構造
利用LSTM模型建立鐘差預報模型的方式包括鐘差數據的訓練和預報兩部分。在訓練階段,將鐘差序列作為神經網絡的訓練數據,輸入的訓練數據既作為網絡的輸入也作為網絡的期望輸出,通過LSTM神經元的訓練,使其掌握數據前后間的映射關系;在預報階段,將當前時刻的鐘差數據作為網絡的輸入,通過已建立的網絡之間前后映射及拓撲關系,依次進行外推得到預報結果。
根據訓練輸入的鐘差序列有限個樣本點的數據特征,參考LSTM預報模型的從簡設計原則,構建基于LSTM的深度循環神經網絡。對于鐘差序列預報的整體框架如圖2所示。
LSTM模型預報部分由輸入層、隱藏層、輸出層、網絡訓練和參數優化5個部分組成。輸入層負責對輸入的鐘差時間序列進行處理,使得輸入的鐘差時間序列滿足LSTM神經元的輸入要求;隱藏層使用基于LSTM神經元的深度循環神經網絡;網絡訓練部分使用自適應優化算法中的亞當(Adam)算法結合LSTM神經元對輸入數據進行訓練;使用網格搜索和交叉驗證算法進行超參數的優化;輸出層負責預報結果的輸出。
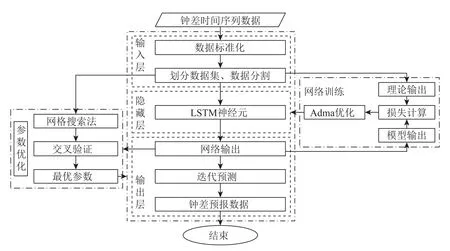
圖2 LSTM預報模型流程
以預處理后鐘差時間序列L0= {l1,l2,…,lr}為例,將其導入網絡進行訓練、預報計算的具體流程如下:
1)數據標準化。將預處理后的鐘差時間序列L0= {l1,l2,…,lr}分 為 訓 練集Ltr= {l1,l2,…,ls}和 測試集Lte= {l s+1,ls+2,…,lr},其中1<s<r。之后,對訓練集中的每個數據lu(1 ≤u≤s)通過式(14)進行Z-score標準化,得到標注化數據集Lt′r= {l1′,l2′ ,…,ls′},即

式中:μ為序列Ltr的均值;σ為序列Ltr的標準差。
2)數據分割。根據數據分割長度L,將標準化后的訓練數據集Lt′r分割為長度為L的(s-L+1)個數列,使訓練集輸入變為X= {X1,X2,…,Xs-L+1},其 中Xp= {l′p,l′p+1,…,l′p+L-1};則此刻 對應 的 理論 輸出Y= {Y1,Y2,…,Ys-L+1},其中Yp={l′p+1,l′p+1+2,…,l′p+L},1≤p≤s-L+1。
3)數據訓練。當模型的輸入為X時,令其經隱 藏 層 計 算 后 的 輸 出 為P= {P1,P2,…,Ps-L+1},則Pp=fLSTM-forward(X p,c p-1,hp-1),Xp表示當前時 刻 的輸入,cp-1表示前一歷元LSTM神經元的狀態值,hp-1表示前一歷元LSTM神經元的輸出值,fLSTM-forward表示LSTM神經元的更新公式。網絡訓練過程中以求得損失函數結果更小為模型優化目標,在這個過程中使用小批量梯度下降法(minibatch gradient descent, M-BGD),每次選擇批尺寸大小為B個輸入值作為1批輸入網絡進行訓練,通過Adam優化器使得網絡不斷更新各個參數的權重,最后得到1個對輸入序列X擬合效果最好的LSTM模型,記作fLSTM-net。
4)超參數優選。將網格搜索和交叉驗證方法結合,對數據分割長度L和批尺寸大小B進行優選。
5)數據預測。預測是采用逐個歷元數據迭代的方法,利用訓練好的fLSTM-net模型,將訓練集的最后1組 數 據輸 入fLSTM-net中,得 到 的 輸 出 結 果 為Ps-L+1=fLSTM-net(Ys-L+1)={ps-L+2,ps-L+3,…,ps+1}。將s+1時刻的預測值ps+1與YL合 并 為1組新 的 數據將YL+1帶入fLSTM-net中,可以得到s+2時刻的預測值ps+2;按照這個方法依次計算,得到預測序列P0={p s+1,ps+2,…,pr}。將預測序列P0進行Z-score反標準化還原,就可以得到預報結果。
3 實驗與結果分析
實驗數據選取iGMAS超快速(iGMAS ultrarapid, ISU)鐘差文件,其中包括超快速觀測部分(ISU observed, ISU-O)和超快速預報部分(ISU predicted, ISU-P),數據文件格式為isu*****_00.clk,*****為BDT,前4位是BDT星期,第5位是星期內天)。考慮BDS包含地球靜止軌道(geostationary Earth orbit, GEO)、傾斜地球同步軌道(inclined geosynchronous orbits, IGSO)及中圓地球軌道(medium Earth orbit, MEO)三種不同軌道的衛星,不同軌道所處空間環境不同,因此在每個軌道隨機選取某一刻衛星進行實驗,本文選取的是C04、C07和C12三顆衛星進行實驗。最后,以實測部分ISU-O為訓練數據和期望輸出,采用均方根誤差(root mean squared error,RMSE)和極差(Range)2個性能指標來評估預報結果的精度與穩定性[9]。RMSE和R的具體定義為:

式中:R為極差;εi為i時刻期望輸出li與預報值l?i的殘差;εmax和εmin分別代表差值序列中的最大值與最小值。
3.1 超參數優選實驗分析
結合網格搜索和交叉驗證的方法,對LSTM神經網絡中使用的超參數窗口分割長度L和批尺寸大小B兩種超參數進行優化。根據數據類型設計超參數的取值范圍,其中窗口分割長度分別取0.5、1.0、1.5、2.0、3.0、4.0、6.0及12 h內的數據個數,即L∈{2, 4, 6, …, 24, 48},批尺寸大小B∈{2, 4,… ,48},以訓練集中訓練數據的誤差函數最小為目標進行訓練,運用多層網格搜索對超參數L、B進行優選。
以C12衛星的ISU鐘差預報為例,選取2019-01-14的15 min采樣率共96個歷元的ISU-O數據進行訓練,預報96個歷元數據。以2019-01-15的ISU-O數據為真值,計算RMSE值,遍歷本文所選的L、B兩個超參數的取值范圍,繪制超參數優選圖如圖3所示。
圖3 參數優選
從圖3中可以看出,當批尺寸大小B的取值在20以內時,LSTM網絡的預報結果不甚理想,且容易陷入局部最優解,B的取值大于20時,不同的窗口分割長度預報結果的RMSE值變化在0~1.2×10-8的范圍內。表2給出了C04、C07和C12三顆衛星使用上述預報方案時,前5組最優參數組合以及預測精度。綜合來看,當L=4、B=30時,預報精度更為理想。

表2 C04、C07、C12衛星LSTM模型前5組最優參數組合及預測精度
3.2 不同數據預處理方法的LSTM預報實驗
不同數據預處理方法對神經網絡的預報精度有著重要影響,使用文中提到的2種1次差數據預處理方法與未使用1次差處理的數據進行LSTM模型預報精度分析。為了便于區分,將未使用1次差處理鐘差數據的LSTM預報方案命名為LSTM_1,使用鐘差1次差法處理的預報方案命名為LSTM_2,經過改進MAD法粗差處理后的1次差數據預報方案命名為LSTM_3。為了對比這3種方案的預報性能,以日期2019-01-09的ISU-O數據進行預處理,然后訓練預報第2天(2019-01-10)的鐘差,以第2天的ISU-O數據為真值與預報結果作對比,其部分預報結果的相位數據及1 d的預報殘差如圖4所示。
將圖4中實驗結果與對應的真值進行對比后可以看出,LSTM_2方案的預報殘差變化范圍最大,其前5個歷元的預報結果最好,經過1次差處理后,鐘差數據中的粗差被放大,導入網絡訓練的輸入數據中粗差對網絡訓練的影響增大,干擾了模型的訓練、擬合過程,造成網絡出現過擬合現象,使網絡結構極不穩定,因此當預報數據長度超過20個歷元后,其預報殘差將持續增大(包括向正無窮與負無窮)。對比LSTM_1和LSTM_3這2種實驗方案:前5個歷元,2種方法的殘差大小和變化趨勢有明顯差距,在前20個歷元內,2種方法的預報殘差趨于穩定,變化趨勢相近;但是LSTM_3的殘差波動幅度明顯較LSTM_1的殘差浮動小。

圖4 不同預處理方法后預報結果與殘差圖
為進一步對比3種預處理方法對預報結果精度的影響,將預報結果與ISU-O真值進行RMSE和R值統計,如表3所示。
從表3可以看出:LSTM_2由于原始數據中粗差被放大造成網絡訓練過程中不穩定,其R值從6 ns到30 ns,而RMSE值高達16 ns,預報結果的精度和穩定度較差;對比LSTM_1和LSTM_3,這2個模型的RMSE和R值均在納秒級,其中以LSTM_3方案的結果最好,其RMSE和R值都能保持在2 ns以內。通過對1次差序列進行改進MAD法粗差探測、剔除與補齊,不僅削弱了鐘差相位數據中趨勢項和粗差數據對網絡訓練的影響,還能減少輸入數據有效數位長度,使輸入的數據更能表征數據的變化特點,減少網絡的冗余。

表3 不同數據預處理方法預報精度統計表 單位:ns
3.3 ISU鐘差預報精度分析

圖5 ISU-O短期預報結果與殘差
為了進一步驗證LSTM在BDS的ISU鐘差產品中的預報性能,選用日期2019-01-09的ISU-O數據作為LSTM和WNN模型的訓練數據,以ISU鐘差產品中的預報部分和WNN預報結果作為對照。選擇3.2實驗中LSTM_3使用的數據預處理方法對實驗數據進行預處理,然后將預處理后的數據,分別通過WNN和LSTM兩種神經網絡模型進行訓練并預報第2天(2019-01-10)的鐘差,以第2天的ISU-O數據為真值,對比ISU-P數據以及WNN和LSTM預測結果,其部分預報結果的相位數據及1 d的預報殘差如圖5所示。
從圖5每顆衛星前12個歷元的預報鐘差值可以發現:LSTM、WNN和ISU-P的結果與ISU-O的數據趨勢基本相同,結合預報殘差圖分析,ISU-P數據的殘差偏離程度最大,尤其是C04衛星,其ISU-P數據的殘差呈遞增趨勢,其預報誤差達到了30 ns以上;WNN的預報結果具有明顯的趨勢項,從C04和C07 2顆衛星的預報結果來看,其預報誤差呈明顯的遞增或遞減趨勢,但是其離散程度與ISU-P的殘差相比明顯較小;而LSTM的預報結果較前二者明顯更好一些,表現了明顯的“自我約束能力”。
為了反映LSTM、WNN和ISU-P短期預報的性能,將3種預報結果前1、2、3、4、6及12 h的預報結果精度進行RMSE統計,如表4所示。

表4 LSTM、WNN和ISU-P短期預報RMSE統計表
從表4可以看出:3種預報方案在最初1~2 h的預報精度波動較為明顯,隨著預報時間增加,預報精度逐步提升。為了整體了解LSTM、WNN和ISU-P 3種結果的預報精度和穩定度,將3顆衛星的3種結果與ISU-O作比較表征其精度與穩定度的RMSE與R值進行統計如表5所示。
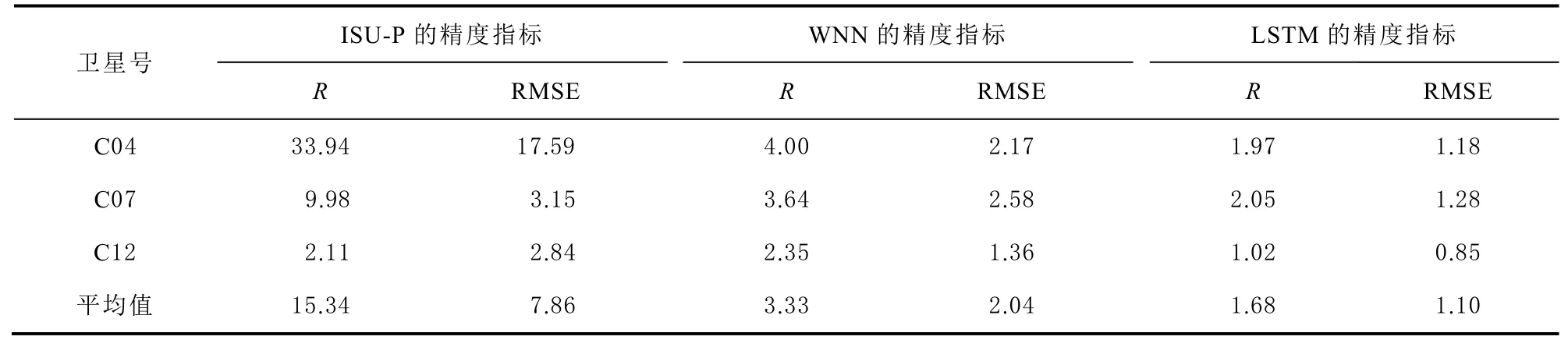
表5 LSTM、WNN和ISU-P 1d預報精度統計表 單位:ns
從表5中可以看出,LSTM模型的預報精度和穩定性在3顆衛星中表現得最好,3顆衛星平均精度在1 ns左右,穩定度在2 ns左右,尤其是C12衛星的預報精度可達0.85 ns,穩定度在1 ns左右。而ISU-P的預報精度和穩定性最差,1 d內誤差最大可達33 ns,同時精度也達到18 ns,這樣的精度在進行單點定位時誤差在米級。
對比這3種預報結果,WNN和LSTM的日預報精度均優于ISU-P數據,其中在C04、C07和C12三顆衛星中,LSTM的預報精度較ISU-P數據相比精度分別提高了93%、59%和70%,較WNN分別提高了45%、50%和38%。相較于WNN模型,LSTM更適合作為1種較有效的鐘差預報方法應用到鐘差短期預報中。
4 結束語
為了提高鐘差短期預報性能,提出1種1次差和LSTM模型組合的鐘差預報模型。經過超參數優選及2種數據預處理方法對比,搭建適合BDS超快速鐘差預報的組合LSTM模型,將LSTM預報結果分別與WNN模型預報結果及ISU-P數據比較,得到如下結論:
1)采用網格搜索和交叉驗證結合的方法對L和B共2個超參數進行優選,提高了LSTM模型的預報性能和泛化能力。當L=4、B=30時,LSTM模型預報精度較好。
2)對鐘差1次差分數據進行粗差剔除,不僅可以消除鐘差數據中的異常點,還減少了有效數據長度,可降低LSTM網絡的復雜程度。通過這種預處理方法后,LSTM模型預報結果較直接使用LSTM模型進行預報的精度提高了76%。
3)鐘差數據1次差剔除粗差預處理后,再使用LSTM模型預報鐘差,其單日預報精度較WNN預報模型提高了45%,與ISU-P數據相比,則提高了74%。該模型至少在日內預報精度優于ISU-P數據,可以作為1種較為有效的鐘差預報模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19