BDS-2/BDS-3實(shí)時(shí)衛(wèi)星鐘差的性能分析
2021-03-01 15:44:36王浩浩黃觀文付文舉
導(dǎo)航定位學(xué)報(bào) 2021年1期
王浩浩,黃觀文,付文舉,謝 威,曹 鈺
(1. 長安大學(xué) 地質(zhì)工程與測繪學(xué)院,西安 710054;2. 武漢大學(xué) 測繪遙感信息工程國家重點(diǎn)實(shí)驗(yàn)室,武漢 430079)
0 引言
實(shí)時(shí)衛(wèi)星軌道和實(shí)時(shí)鐘差產(chǎn)品作為實(shí)時(shí)精密單點(diǎn)定位(real-time precise point positioning, RT-PPP)的先決條件,其時(shí)效性和精度決定了RT-PPP服務(wù)的性能[1]。在衛(wèi)星導(dǎo)航定位領(lǐng)域,精確的位置測量實(shí)際上就是精確的時(shí)間測量[2]。由于星載原子鐘極易受外界環(huán)境及本身物理特性的影響,很難通過數(shù)學(xué)模型對衛(wèi)星鐘差進(jìn)行準(zhǔn)確預(yù)報(bào)[3],因此必須利用地面跟蹤站的實(shí)時(shí)觀測數(shù)據(jù)進(jìn)行衛(wèi)星鐘差的實(shí)時(shí)估計(jì)[4]。
中國自主研發(fā)、獨(dú)立運(yùn)行的北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system, BDS)于2020年全面完成北斗三號(BDS with global coverage,BDS-3)全球組網(wǎng),BDS-3實(shí)時(shí)高精度服務(wù)性能必將受到全球關(guān)注。目前已有部分學(xué)者對BDS-3精密定軌和鐘差產(chǎn)品展開相關(guān)研究。文獻(xiàn)[5]研究結(jié)果表明,BDS-3衛(wèi)星定軌重疊弧段的3維均方根值(root mean square, RMS)小于10 cm,精密定軌精度優(yōu)于北斗衛(wèi)星導(dǎo)航(區(qū)域)系統(tǒng)即北斗二號(BeiDou navigation satellite(regional) system,BDS-2)。文獻(xiàn)[6]基于事后精密軌道和鐘差產(chǎn)品,進(jìn)行BDS-2與BDS-3聯(lián)合靜態(tài)PPP,在東(E)方向、北(N)方向、高程(U)方向的定位精度分別
式中:PC、LC分別表示偽距和載波;r、s分別表示測站和衛(wèi)星;vLC、vPC為無電離層組合載波和偽距的殘差;為接收機(jī)和衛(wèi)星鐘差;dtrop和Mr分別表示對流層天頂延遲及其投影函數(shù);為吸收了接收機(jī)端和衛(wèi)星端偽距和相位的硬件延遲后的模糊度參數(shù);λIF為無電離層組合的波長分別為星站間幾何距離與LC、PC為10.7、19.5、20.4 mm;加入BDS-3衛(wèi)星后,3個(gè)方向的收斂時(shí)間相對于BDS-2分別提升了27.15%、27.87%、35.76%。文獻(xiàn)[7]進(jìn)行的BDS-3實(shí)時(shí)靜態(tài)PPP,其結(jié)果在N方向基本優(yōu)于1 cm,E方向及U方向?yàn)?~4 cm,水平和高程方向相較于BDS-2分別提升50.23%、60.24%。BDS-3的加入,對BDS-2實(shí)時(shí)鐘差的提升幅度、BDS-3實(shí)時(shí)鐘差的定位服務(wù)性能等已成為BDS應(yīng)用領(lǐng)域關(guān)注的焦點(diǎn)問題之一,但目前的公開研究成果較少,亟需開展相關(guān)的研究工作。
實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)模型目前主要包括非差模型、歷元間差分模型和混合差分模型[8]。其中,非差模型觀測量之間不存在相關(guān)性,不依賴于某一初始衛(wèi)星鐘差,同時(shí)也保留了模糊度參數(shù),有利于后續(xù)非差模糊度固定以及相位硬件延遲特性研究等[9],理論模型較為嚴(yán)密。鑒于此,本文采用多模全球衛(wèi)星導(dǎo)航系統(tǒng)(global satellite navigation system, GNSS)實(shí)驗(yàn)跟蹤網(wǎng)(multi-GNSS experiment, MGEX)和國際GNSS監(jiān)測評估系統(tǒng)(international GNSS monitoring and assessment system, iGMAS)監(jiān)測站的數(shù)據(jù),基于非差模型進(jìn)行BDS-2和BDS-3實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)和精度評估,并利用6個(gè)測站的數(shù)據(jù)進(jìn)行實(shí)時(shí)動態(tài)PPP模擬實(shí)驗(yàn),驗(yàn)證評估目前BDS-2和BDS-3衛(wèi)星鐘差的定位服務(wù)性能。
1 基于非差觀測量的實(shí)時(shí)衛(wèi)星鐘差估計(jì)
1.1 非差觀測方程
本文采用無電離層組合偽距和載波相位觀測量,在非差觀測方程中,固定衛(wèi)星軌道和測站坐標(biāo),利用模型改正相位纏繞等誤差,實(shí)時(shí)估計(jì)衛(wèi)星鐘差。觀測方程可表達(dá)為觀測值之差。

若直接用式(1)求解衛(wèi)星鐘差,法方程會出現(xiàn)秩虧,就必須引入1個(gè)基準(zhǔn)鐘,才能求解得到其他接收機(jī)鐘和衛(wèi)星鐘相對于該基準(zhǔn)鐘的鐘差[10]。研究表明,當(dāng)基準(zhǔn)鐘的鐘差精度優(yōu)于1×10-6s時(shí),相對鐘差和絕對鐘差對用戶的定位結(jié)果是一致的[11]。因此,本文采用引入某個(gè)外接高精度原子鐘的接收機(jī)鐘,作為基準(zhǔn)鐘進(jìn)行先驗(yàn)約束。同時(shí),考慮到偽距觀測值噪聲水平約為相位觀測值噪聲水平的100倍,基于衛(wèi)星高度角函數(shù)對偽距和載波相位的無電離層線性組合觀測值賦予不同的先驗(yàn)權(quán)[12]。
1.2 實(shí)時(shí)衛(wèi)星鐘差估計(jì)算法實(shí)現(xiàn)
實(shí)時(shí)鐘差參數(shù)估計(jì)方法有序貫最小二乘估計(jì)、卡爾曼濾波估計(jì)以及均方根信息濾波估計(jì)等。其中序貫最小二乘估計(jì)是1種經(jīng)常用于動態(tài)定位的經(jīng)典方法,可避免不精確狀態(tài)模型信息的影響[13]。本文即采用序貫最小二乘估計(jì)方法進(jìn)行實(shí)時(shí)衛(wèi)星鐘差解算。
在序貫最小二乘估計(jì)的程序?qū)崿F(xiàn)中,歷元更新包括不活動參數(shù)的移除以及新參數(shù)的引入。實(shí)時(shí)更新的有效信息矩陣將作為下一個(gè)歷元的先驗(yàn)信息,從而實(shí)時(shí)估計(jì)接收機(jī)鐘差和衛(wèi)星鐘差等參數(shù)。將解算得到的參數(shù)代入誤差方程中,計(jì)算出相應(yīng)的殘差值,進(jìn)而可得到估計(jì)歷元的單位權(quán)標(biāo)準(zhǔn)差。隨后所有參數(shù)再次分為活動參數(shù)和不活動參數(shù),序貫應(yīng)用到下一個(gè)歷元,然后實(shí)現(xiàn)實(shí)時(shí)衛(wèi)星鐘差估計(jì)的序貫最小二乘平差。當(dāng)先驗(yàn)信息嚴(yán)密可靠時(shí),實(shí)時(shí)序貫最小二乘估計(jì)具有無偏最優(yōu)性。
非差模型的實(shí)時(shí)衛(wèi)星鐘差估計(jì)算法實(shí)現(xiàn)流程如圖1所示。

圖1 非差模型的實(shí)時(shí)衛(wèi)星鐘差估計(jì)算法實(shí)現(xiàn)流程
2 BDS實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)與結(jié)果分析
2.1 實(shí)驗(yàn)數(shù)據(jù)與處理策略
本文選取均勻分布在全球的58個(gè)MGEX站、10個(gè)iGMAS站,2019-10-14—2019-10-19(年積日第287—292天)連續(xù)6 d、采樣間隔為30 s的觀測數(shù)據(jù),采用武漢大學(xué)國際GNSS服務(wù)(Internal GNSS Service, IGS)數(shù)據(jù)中心(分析中心識別號為WUM)精密軌道產(chǎn)品,分別進(jìn)行BDS-2、BDS-2/BDS-3實(shí)時(shí)衛(wèi)星鐘差估計(jì)。然后利用沒有參與實(shí)時(shí)衛(wèi)星鐘差解算的6個(gè)測站(站名分別為GUAM、KAT1、SEYG、TOW2、USUD、YARR)、采樣間隔為30 s的觀測數(shù)據(jù),用BDS-2/BDS-3組合實(shí)時(shí)估計(jì)的衛(wèi)星鐘差,進(jìn)行實(shí)時(shí)動態(tài)PPP模擬實(shí)驗(yàn),進(jìn)一步驗(yàn)證實(shí)時(shí)估計(jì)衛(wèi)星鐘差的定位性能。用于實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)以及實(shí)時(shí)動態(tài)PPP定位驗(yàn)證的測站分布如圖2所示,實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)采用的測站用圓形表示,實(shí)時(shí)動態(tài)PPP驗(yàn)證采用的測站用三角形表示。

圖2 用于實(shí)時(shí)衛(wèi)星鐘差估計(jì)和實(shí)時(shí)動態(tài)PPP的測站分布
表1總結(jié)了實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)采用的模型和參數(shù)估計(jì)策略,其中接收機(jī)和衛(wèi)星鐘差參數(shù)作為白噪聲進(jìn)行估計(jì),每個(gè)測站的天頂對流層延遲部分則作為分段常數(shù)進(jìn)行估計(jì)。
目前能夠跟蹤到BDS-3的C35、C36、C37、C59衛(wèi)星的測站數(shù)量較少,觀測數(shù)據(jù)不足,導(dǎo)致衛(wèi)星的定軌精度較其他衛(wèi)星較差[7]。由于軌道與鐘差的耦合性,在實(shí)時(shí)估計(jì)過程中,衛(wèi)星鐘差會吸收一部分軌道誤差。因此,為避免在鐘差解算過程中對其他衛(wèi)星的解算結(jié)果造成影響,對上述4顆衛(wèi)星不予估計(jì)。

表1 實(shí)時(shí)衛(wèi)星鐘差估計(jì)采用的模型和參數(shù)估計(jì)策略

(續(xù)表1)
2.2 實(shí)時(shí)衛(wèi)星鐘差精度分析
衛(wèi)星鐘差精度評估選取WUM事后精密鐘差產(chǎn)品作為參考,采用二次差法計(jì)算實(shí)時(shí)鐘差與參考鐘差的差異,利用該差異統(tǒng)計(jì)標(biāo)準(zhǔn)差(standard deviation, STD)來評估實(shí)時(shí)衛(wèi)星鐘差精度[15]。由于不同軟件鐘差解算時(shí)選取的鐘差基準(zhǔn)并不相同,因此上述兩套鐘差差異中,還包含各自鐘差基準(zhǔn)的偏差,本文通過當(dāng)前歷元所有衛(wèi)星的鐘差差異取平均,作為基準(zhǔn)偏差進(jìn)行扣除,避免所選的參考衛(wèi)星鐘差出現(xiàn)較大偏差時(shí)影響評估結(jié)果[16-17]。圖3和圖4分別為實(shí)時(shí)估計(jì)的BDS衛(wèi)星鐘差單天和單顆衛(wèi)星STD值的統(tǒng)計(jì)。

圖3 實(shí)時(shí)估計(jì)的BDS衛(wèi)星鐘差單天STD值

圖4 實(shí)時(shí)估計(jì)的BDS衛(wèi)星鐘差單顆衛(wèi)星STD值
從圖3可以看出,BDS-2、BDS-2/BDS-3實(shí)時(shí)估計(jì)的衛(wèi)星鐘差每天的STD分別為0.11~0.16及0.09 ~0.13 ns,后者相對于前者的STD平均提升約18%。從圖4可以看出,BDS-2、BDS-2/BDS-3實(shí)時(shí)估計(jì)的每顆衛(wèi)星的衛(wèi)星鐘差平均STD分別為0.06 ~0.38和0.06 ~0.30 ns。其中,BDS-2實(shí)時(shí)估計(jì)的C11、C12和C14這三顆中圓地球軌道(medium Earth orbit, MEO)衛(wèi)星的鐘差精度較差,可能是因?yàn)楸桓櫟降臏y站相對于地球靜止軌道(geostationary Earth orbit, GEO)衛(wèi)星和傾斜地球同步軌道(inclined geosynchronous orbits, IGSO)衛(wèi)星較少導(dǎo)致。可以發(fā)現(xiàn),大部分BDS-2實(shí)時(shí)估計(jì)衛(wèi)星鐘差的STD隨著BDS-3衛(wèi)星參與實(shí)時(shí)鐘差解算得到提高,其中C11、C12、C14這3顆MEO衛(wèi)星鐘差的改善效果尤為明顯。這是因?yàn)榭捎^測衛(wèi)星的數(shù)量增加,極大地改善了衛(wèi)星的幾何分布,地面監(jiān)測站能夠在較長時(shí)間段內(nèi)觀測到BDS-2/BDS-3衛(wèi)星,以至于總體觀測數(shù)據(jù)增多,有利于在鐘差解算過程中,很好地分離接收機(jī)鐘差和衛(wèi)星鐘差,提高實(shí)時(shí)衛(wèi)星鐘差估計(jì)精度。
2.3 實(shí)時(shí)鐘差單歷元解算時(shí)間分析
Inter(因特)Core(酷睿)i5-3230M 2.60 GHz個(gè)人計(jì)算機(jī)處理下,2019-10-14—2019-10-19(年積日第287—292天)BDS-2/BDS-3組合實(shí)時(shí)衛(wèi)星鐘差估計(jì)的單歷元解算耗時(shí)統(tǒng)計(jì)如圖5所示。

圖5 BDS-2/BDS-3實(shí)時(shí)衛(wèi)星鐘差估計(jì)單歷元解算時(shí)間
從圖5中可以看出,在全球均勻分布的68個(gè)跟蹤站網(wǎng)的情況下,所有歷元估計(jì)時(shí)間均小于4 s,平均每個(gè)歷元的解算時(shí)間約為2.3 s。單歷元實(shí)時(shí)衛(wèi)星鐘差解算耗時(shí),能夠滿足目前IGS多家分析中心所提供的5 s更新率的實(shí)時(shí)衛(wèi)星鐘差產(chǎn)品。
3 基于估計(jì)鐘差的實(shí)時(shí)動態(tài)PPP定位性能分析
為了進(jìn)一步評估實(shí)時(shí)衛(wèi)星鐘差性能,對基于BDS2/BDS3組合實(shí)時(shí)估計(jì)的衛(wèi)星鐘差,進(jìn)行了實(shí)時(shí)動態(tài)PPP定位性能分析。考慮到事后精密產(chǎn)品天與天之間的軌道跳變,對鐘差解算會存在一定的影響,選取2019-10-15(年積日第288天)02:00—22:00,采樣率為30 s的MGEX測站靜態(tài)觀測數(shù)據(jù),分別進(jìn)行BDS-2、BDS-2/BDS-3的實(shí)時(shí)動態(tài)PPP模擬實(shí)驗(yàn),并與使用WUM事后精密鐘差產(chǎn)品進(jìn)行BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP模擬實(shí)驗(yàn)的定位結(jié)果作比較。動態(tài)PPP在實(shí)時(shí)處理模式下,采用序貫最小二乘估計(jì)方法,歷元間不繼承坐標(biāo)信息,進(jìn)而實(shí)現(xiàn)測站坐標(biāo)的實(shí)時(shí)動態(tài)解。以上3種實(shí)時(shí)動態(tài)PPP模擬實(shí)驗(yàn)分別對應(yīng)實(shí)驗(yàn)1、實(shí)驗(yàn)2、實(shí)驗(yàn)3。圖6和表2為實(shí)時(shí)動態(tài)PPP在E、N、U方向上定位結(jié)果的RMS統(tǒng)計(jì)。

?
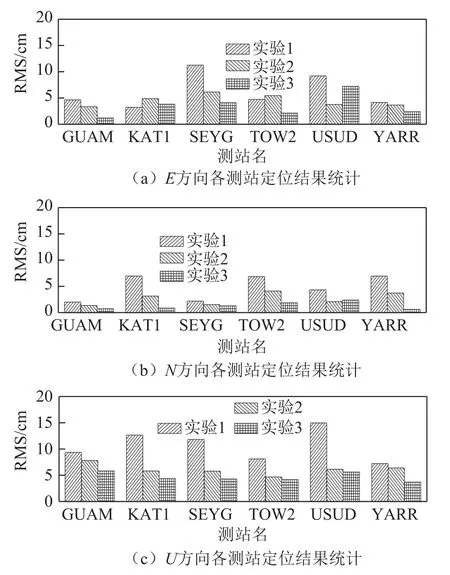
圖6 各測站在E、N、U方向的實(shí)時(shí)動態(tài)PPP定位精度RMS統(tǒng)計(jì)

表2 所有測站實(shí)時(shí)動態(tài)PPP的RMS平均精度統(tǒng)計(jì) 單位:cm
從圖6可以看出,大部分測站BDS-2實(shí)時(shí)動態(tài)PPP定位精度,在水平方向優(yōu)于10 cm,高程方向優(yōu)于15 cm。隨著BDS-3衛(wèi)星的加入,大部分測站BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP定位精度在水平方向優(yōu)于5 cm,高程方向優(yōu)于10 cm。相對于BDS-2單系統(tǒng),定位精度在水平和高程方向均有提升。從表2的所有測站實(shí)時(shí)動態(tài)PPP的RMS平均可以看出,與使用WUM事后精密鐘差產(chǎn)品進(jìn)行的BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP定位結(jié)果相比,使用BDS-2/BDS-3組合實(shí)時(shí)估計(jì)的衛(wèi)星鐘差、分別進(jìn)行的BDS-2、BDS-2/BDS-3實(shí)時(shí)動態(tài)PPP定位精度,在E、N、U方向上均有減弱,考慮到年積日第288天實(shí)時(shí)估計(jì)的衛(wèi)星鐘差STD在0.2 ns(等效距離為6 cm)以內(nèi),這種定位結(jié)果差別,能夠進(jìn)一步說明實(shí)時(shí)估計(jì)的鐘差與事后鐘差差異不大,符合效果很好。所有測站BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP的RMS平均定位精度,在E、N、U方向上分別達(dá)到約4.54、2.66、6.11 cm,相對于BDS-2單系統(tǒng)的RMS平均定位精度,在E、N、U方向上分別提升了26.77%、45.49%、56.18%。同時(shí)對所有測站的實(shí)時(shí)動態(tài)PPP的平均收斂時(shí)間進(jìn)行統(tǒng)計(jì),當(dāng)有連續(xù)超過20個(gè)歷元的定位精度優(yōu)于10 cm時(shí),則認(rèn)為達(dá)到收斂。所有測站BDS-2實(shí)時(shí)動態(tài)PPP,在E、N、U方向上的平均收斂分別約為73、50、104 min,BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP,在E、N、U方向上的平均收斂時(shí)間相對于BDS-2分別提升了56.16%、48.00%、50.96%。
同時(shí)以SEYG、TOW2測站為例,圖7和圖8分別給出了SEYG、TOW兩測站BDS-2、BDS-2/BDS-3實(shí)時(shí)動態(tài)PPP,在E、N、U方向上的定位誤差時(shí)間序列以及相應(yīng)的可見衛(wèi)星數(shù)目。

圖7 SEYG測站實(shí)時(shí)動態(tài)PPP時(shí)間序列

圖8 TOW2測站實(shí)時(shí)動態(tài)PPP時(shí)間序列
從圖7和圖8可以看出,BDS-3衛(wèi)星的加入,使得可觀測的衛(wèi)星數(shù)增加,能夠提高觀測數(shù)據(jù)的數(shù)量與質(zhì)量,加快收斂時(shí)間,對提高高程方向定位精度的效果尤為明顯,同時(shí)也能夠在較長時(shí)間內(nèi),保持穩(wěn)定的定位性能。因此,相對于BDS-2實(shí)時(shí)動態(tài)PPP,BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP能夠取得更短的收斂時(shí)間和更優(yōu)的定位精度。
4 結(jié)束語
本文采用MGEX和iGMAS的68個(gè)跟蹤站的觀測數(shù)據(jù),實(shí)現(xiàn)了BDS-2、BDS-2/BDS-3組合實(shí)時(shí)精密衛(wèi)星鐘差估計(jì),利用6個(gè)測站的觀測數(shù)據(jù)進(jìn)行實(shí)時(shí)動態(tài)PPP模擬實(shí)驗(yàn),對目前BDS-3實(shí)時(shí)衛(wèi)星鐘差的定位服務(wù)性能以及對BDS-2的提升幅度進(jìn)行了分析,得到以下結(jié)論:
1)BDS-2、BDS-2/BDS-3組合實(shí)時(shí)精密衛(wèi)星鐘差估計(jì)的衛(wèi)星鐘差產(chǎn)品的STD均優(yōu)于0.5 ns,BDS-2/BDS-3組合估計(jì)的實(shí)時(shí)衛(wèi)星鐘差STD相對于BDS-2單系統(tǒng)平均提升了18%。
2)BDS-2/BDS-3組合實(shí)時(shí)動態(tài)PPP在E、N、U方向上的RMS,分別為4.54、2.66、6.11 cm,相對于BDS-2單系統(tǒng)的相應(yīng)結(jié)果分別提升了26.77%、45.49%、56.18%,平均收斂時(shí)間分別提升56.16%、48.00%、50.96%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03