一種多特征約束的路面點云精簡方法
2021-03-03 01:23:32劉如飛楊繼奔任紅偉柴永寧
遙感信息 2021年6期
劉如飛,楊繼奔,任紅偉,柴永寧
(1.山東科技大學 測繪與空間信息學院,山東 青島 266590;2.交通運輸部公路科學研究所,北京 100088)
0 引言
車載激光掃描系統能夠快速獲取高密度、高精度的道路點云數據,從點云中可獲得道路基礎設施的三維信息,對智能交通、應急管理以及道路養護具有重要意義,但海量點云數據中含有大量冗余信息,給管理與應用帶來極大的挑戰[1-2]。根據道路數字化管養發展需求,路面主要管理對象包括路面邊界位置、路面坑槽、沉陷、裂縫等破損目標,均為路面點云三維特征。因此,在路面點云精簡過程中,如何建立一種主要目標保留機制,支撐路面破損分析重構,具有重要的理論與實際意義。
目前,三維點云數據精簡方法主要分為基于拓撲結構和基于特征保留兩種。Weir等[3]利用八叉樹結構循環遞歸地對點云外包圍盒進行拆分,用最小包圍盒中心點代替所有點。該類基于拓撲結構的點云精簡方法雖然簡單高效,但屬于均勻采樣,不能顧全模型特征。Xi等[4]基于最小距離,利用最小二乘曲面擬合計算平均曲率和法向,然后基于二者交叉保留特征點。Miao等[5]采用均值移位聚類模式的曲率感知自適應重采樣方法精簡點云,能保留明顯特征點,獲得非均勻精簡結果。Zhang等[6]引入熵的概念進行點云精簡,將每一段的形狀特征與自然二次曲面的精簡模型進行匹配,設置規則進行簡化。Yang等[7]將L-1中值和基于泊松分布的區域生長算法相結合,引入k+1鄰域計算點云的特征描述值,實現多閾值的特征保留。Han等[8]在利用法向量檢測邊緣點的基礎上,根據法向量估值量化內部點,迭代刪除重要性最小點,直到滿足精簡率。Wei等[9]通過計算鄰域點法向量與參考平面夾角,建立局部熵模型,根據局部熵的大小進行精簡。李金濤等[10]根據曲率來反映點云中的特征分布,利用對數函數分級后的點云劃分空間柵格,按照分層等級設立點云精簡規則。上述基于特征保留的精簡方法多用于逆向工程中,主要針對利用固定站得到的點云數據,數據獲取不受外界干擾,質量較高,特征分明且數據量較小,精簡過程中不用考慮空洞以及邊界問題。對于道路路面自然模型,適用性不強。
方程喜等[11]通過計算平均曲率來判別特征點,并利用標記法解決點云空洞問題。王勇等[12]對點云數據進行扇形分塊,然后分別使用最低點法和重心法進行點云精簡。杜浩等[13]通過選取種子點構建不規則三角網,然后選取非種子點中的地形特征點進行加密,最后使用鄰近三角面的測試策略剔除冗余點。Pamela等[14]利用搜索半徑查找鄰域點,然后通過高差閾值迭代刪除冗余點。上述方法針對大范圍地形以及公路勘測設計點云進行精簡,但特征判別參數單一,能保留路緣或者變形較大的地物特征,對于車載激光掃描系統獲取的含有破損等局部特征以及邊界特征的道路路面點云,特征保留效果較差,不能支撐路面破損狀況分析。
針對以上問題,本文充分分析路面點云的空間分布和統計特征,提出一種多特征約束的路面點云精簡方法,有效降低點云數據量的同時保留路面細節特征。
1 路面點云精簡方法
本文所提出的精簡方法主要包括以下步驟。首先,對車載激光點云進行預處理,去除路面點云中的噪聲,建立柵格與KD樹混合索引;然后,針對路面破損以及路面邊界建立特征約束,在精簡過程中保留路面主要目標;最后,進行平坦區域均勻柵格重心精簡。算法流程如圖1所示。

圖1 算法流程圖
1.1 點云數據預處理
首先以路緣作為道路邊界,進行點云濾波,得到路面點云數據。由于碎石、落葉等干擾物,存在非路面噪點,取點云橫剖面,如圖2所示。可以看出,路面平坦處高程起伏較小,特征處高程起伏較大,呈連續分布,而噪聲點高于路面且高程起伏較大,存在突變性,數量稀疏。為防止噪聲對后續計算的影響,統計路面點云高程分布規律去除噪聲點[15]。為確保路面邊界的完整性,利用基于三角網格的空洞修補算法對濾波后的點云空洞進行修補[16]。

圖2 路面點云剖面示意圖
針對海量路面點云查詢索引速度慢問題,建立柵格與KD樹結合的混合索引。將點云沿坐標軸方向劃分空間柵格,計算柵格的索引號進行線性排列。查找k鄰域時,首先根據點坐標計算出所在柵格索引號,然后對柵格中的點利用KD樹進行鄰域查詢;若未能找到足夠鄰域點,則根據柵格索引號查詢點所在柵格的相鄰柵格,再對多個柵格中的點利用KD樹進行鄰域查詢;若找到足夠鄰域點,且查找到的相鄰柵格包含最外圍柵格,則查找結束,否則比較鄰域半徑與該點到相鄰柵格X、Y方向上四個面的距離,如果大于一個或多個面的距離,繼續查詢相鄰柵格進行鄰域查詢,直到滿足要求。
1.2 路面破損約束精簡
選取反映點云離散程度的主成分分析特征值、反映局部曲面變化程度的法向量夾角均值和反映局部曲面彎曲程度的平均曲率作為點云特征描述子,構建多特征描述模型,對路面三維破損特征點進行約束保留。
1)特征值計算分析。根據點Pi的鄰域Pj(j=1,2,3,…,k)構建協方差矩陣,如式(1)所示。
(1)

路面特征區域空間形狀的不規則性導致鄰域點對局部特征產生影響不同[17],建立空間距離約束,引入權函數修正協方差矩陣,如式(2)所示。
(2)
(3)


圖3 不同區域點的特征值分布示意圖
2)法向夾角計算分析。根據協方差矩陣計算各點法向量[18],記點Pi的法向量為ni,鄰域點Pj的法向量為nj,則點Pi與鄰域點的法向量夾角均值如式(4)所示。
(4)

路面平坦區域點云高程變化較小,各點的法向量基本處于平行狀態;特征區域點云高程突變,法向量夾角較大。
3)平均曲率計算分析。根據二次曲面基本量計算平均曲率。構建曲面參數方程,如式(5)所示。
r=r(x(u,v),y(u,v),z(u,v))
(5)
計算一階和二階偏導數ru、rv、ruu、ruv、rvv,曲面單位法矢s表達如式(6)所示。
(6)
計算曲面基本量表達如式(7)所示。
(7)
式中:E、F、G為曲面第一基本量;L、M、N為曲面第二基本量。這些值在給定點均為常數,則平均曲率H如式(8)所示。
(8)
4)多特征描述模型建立。路面點云中,點所在局部區域變化越劇烈,則特征值、法向量夾角均值、平均曲率的值越大,為特征點的可能性越大。結合特征描述子建立多特征描述模型,利用多特征描述值作為約束,保留破損特征點。由于各特征描述子數值分布區間不同,為使特征描述子具有同等敏感性,將數量級進行歸一化。對任意點,根據鄰域點特征描述子均值計算中誤差,如式(9)所示。
(9)
(10)

統計特征描述子誤差,如圖4(a)、圖4(b)、圖4(c)所示,呈正態分布。根據偶然誤差正態分布規律,兩倍中誤差涵蓋99.54%的誤差值,可認為在該范圍內的為偶然誤差,即路面固有粗糙度以及變化較小區域;超過該范圍的可認為是粗差,即路面特征變化劇烈區域。為防止粗差點在歸一化計算時占較大權重,以兩倍中誤差作為特征描述子誤差分布截斷點,統計該區間內點數,建立數量級歸一化多特征描述模型,如式(11)所示。
(11)
為降低人為設定特征約束閾值的不確定性,引入路面粗糙度[19]進行特征點約束保留。計算點到鄰域擬合平面的歐式距離oi;統計oi>ηRd的點數T(η為特征點數量控制系數),作為路面破損點數參考;最后對Di進行降序排序,取前T個點為路面破損目標點。
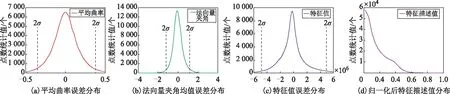
圖4 特征描述子誤差及特征描述值分布示意圖
1.3 邊界與平坦區域精簡
1)路面邊界約束精簡。通過對邊界點的鄰域分布進行分析,采用分布均勻性約束法對路面邊界特征點進行保留。根據點Pi的法向量ni構建投影面,投影面的函數形式如式(12)所示。
(12)
將鄰域點投影至投影面,過點Pi分別平行XOY、XOZ、YOZ作參考面,參考面將投影面分為兩部分。內部點的鄰域分布均勻,參考面兩側投影點數量基本相等,如圖5(a)所示;邊界點的鄰域分布不均勻,參考面兩側投影點數量相差較大,如圖5(b)所示。統計參考面兩側投影點數量,若存在某個參考面兩側投影點數量差值與鄰域點數的比值大于設定閾值,認為是路面邊界點,反之為內部點。
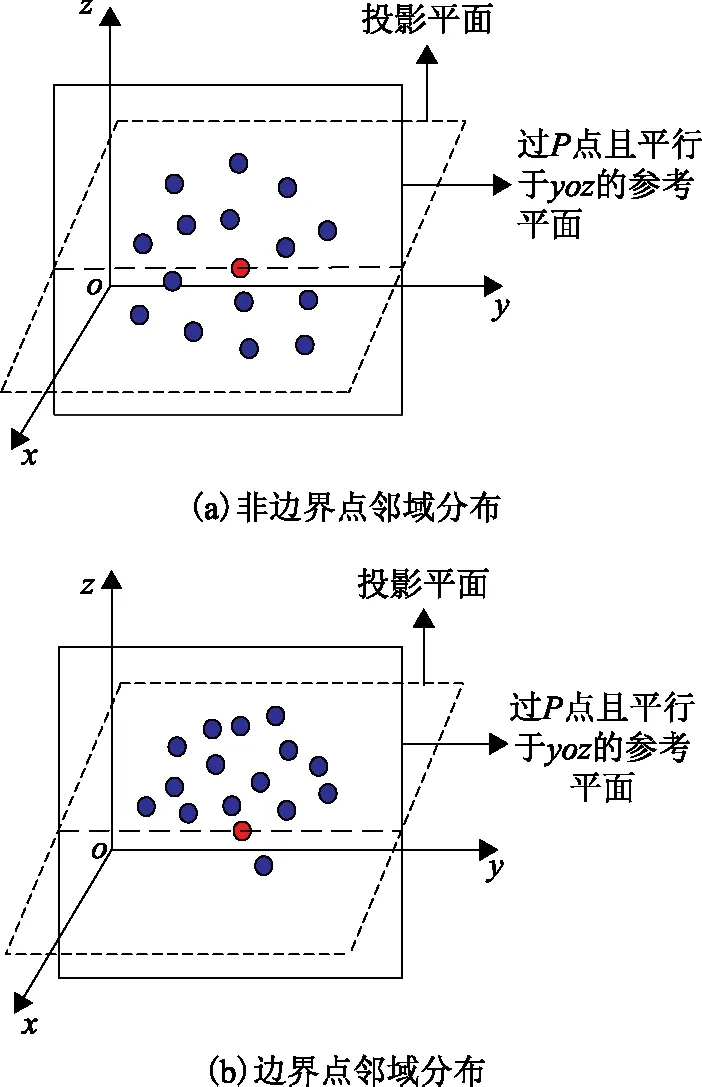
圖5 點云鄰域點投影分布示意圖
2)平坦區域精簡。根據約束條件進行精簡后,剩余點的特征描述值較小,為路面平坦區域。為保證平坦區域均勻采樣,利用柵格重心法進行精簡。遍歷柵格計算重心位置,保留距離重心最近的點,刪除其余點,完成平坦區域點云精簡。
2 實驗分析
選取多為重型車輛通行路段,利用某車載激光掃描系統采集單行駛方向點云,該系統掃描點頻為100萬點/秒,線頻200 Hz,空間定位精度3 cm,相對測距精度1 mm,能夠獲取還原路面真三維狀況的點云數據,截取破損嚴重路段點云進行實驗。其中路段Ⅰ共200 591個點,掃描線平均間距3 cm,線上平均點間距3 cm;路段Ⅱ共961 547個點,掃描線平均間距2 cm,線上平均點間距1 cm。路面破損目標包括坑槽、擁包、裂縫及破碎等。
經實地測量分析,路段Ⅰ實驗參數為:柵格步長dstep=0.15 m,k=25,Rd=1 mm,η=2.5,邊界點判定閾值Ethe=0.60。路段Ⅱ實驗參數為:柵格步長dstep=0.12 m,k=30,Rd=0.85 mm,η=2.0,邊界點判定閾值Ethe=0.65。
將本文方法與隨機采樣方法、DDR方法以及曲率標記方法進行對比,四種方法精簡結果如表1所示。在精簡率接近下,隨機采樣方法效率最高,但忽略特征。DDR方法和曲率標記方法效率基本接近。由于本文算法在精簡過程中計算多個特征描述子,導致運行效率稍低于二者,但特征區域最為清晰,運行時長處于合理范圍內,證明本文方法在保留特征的同時有較好的精簡效率。路面精簡點云如圖6和圖7所示。
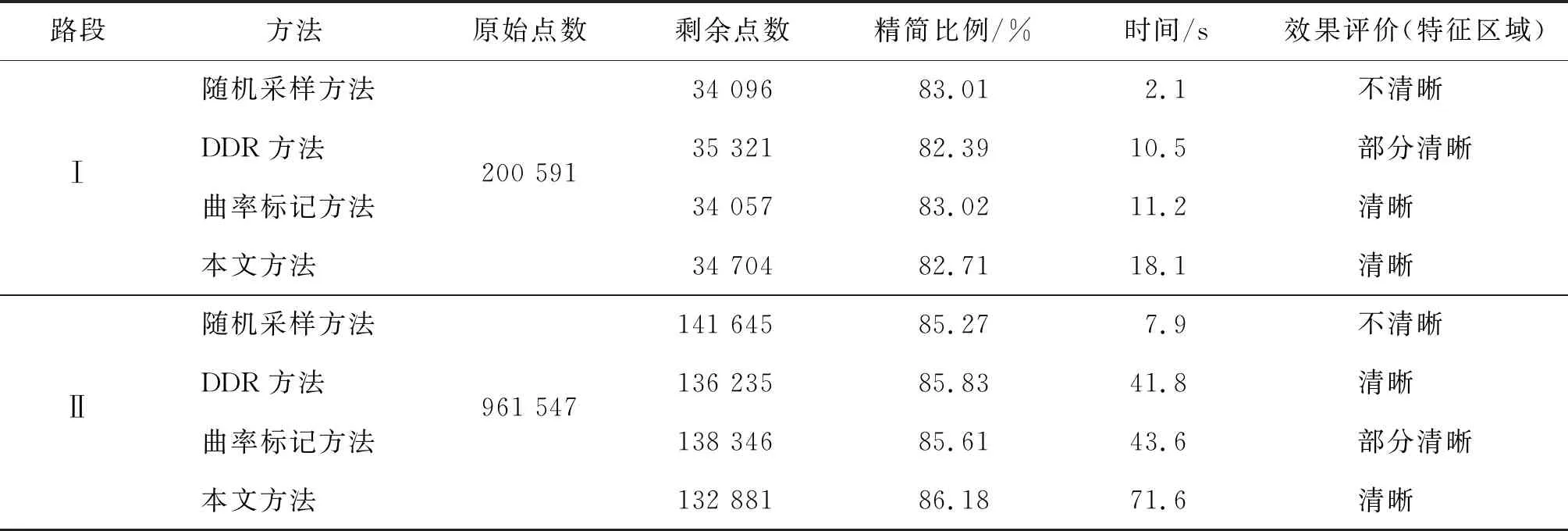
表1 四種精簡方法對比
圖6、圖7顯示,隨機采樣方法精簡的路面點云較均勻,未產生空洞,但仍存在數據冗余;DDR和曲率標記方法能保留部分特征點,但由于判別參數單一,導致部分特征區域保留效果較差,如圖6中橢圓圈出的小范圍破碎以及圖7(e)中人工修補的裂縫,而且DDR方法會產生空洞,影響路面重建效果;本文建立的特征約束方法能在精簡過程中保留密集目標點,確保破損區域的特征細節,而且完整保留了路面邊界點,未產生殘缺,在平坦區域能得到均勻精簡結果。
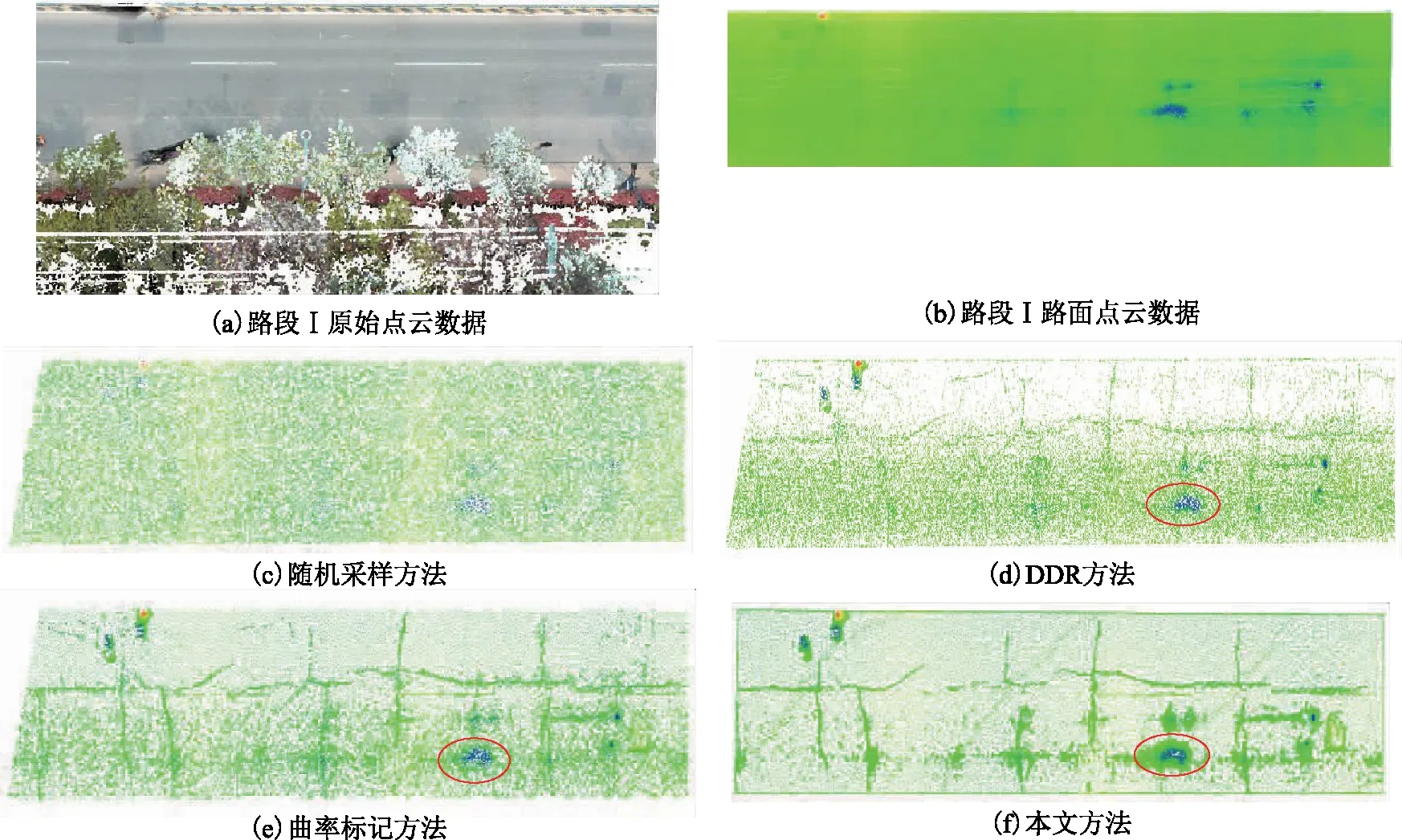
圖6 路段Ⅰ四種方法精簡效果
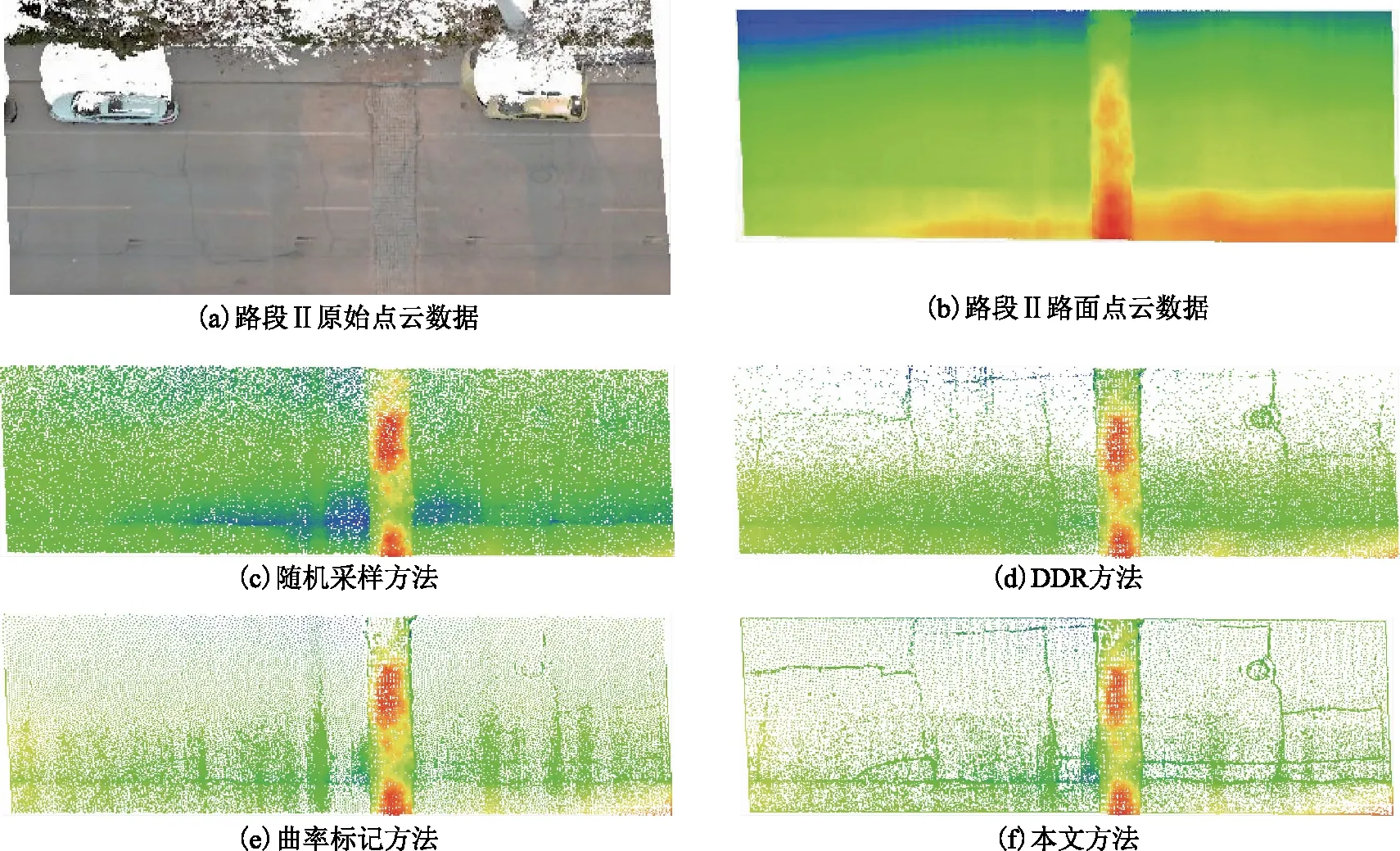
圖7 路段Ⅱ四種方法精簡效果
為了更客觀評估不同精簡方法特征保留效果,對精簡后點云構建三角網[20],選取部分破損區域三角網格以及面片進行對比,如圖8、圖9所示。
圖8顯示,在精簡率接近的情況下,本文方法在擁包、裂縫、破碎等破損區域的三角網更密集,完整性以及特征細節還原效果更好,更接近原始路面模型。圖9顯示,本文方法精簡后重建的人工修補部分更為完整,與原始數據構建的三角面片模型幾乎無區別,其余兩種方法存在特征細節缺失,如圖9中橢圓和矩形圈出的區域所示。可以看出,本文方法特征保留效果最好。
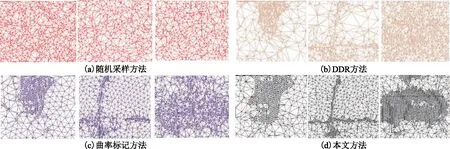
圖8 路段Ⅰ精簡后破損區域三角網格重建效果
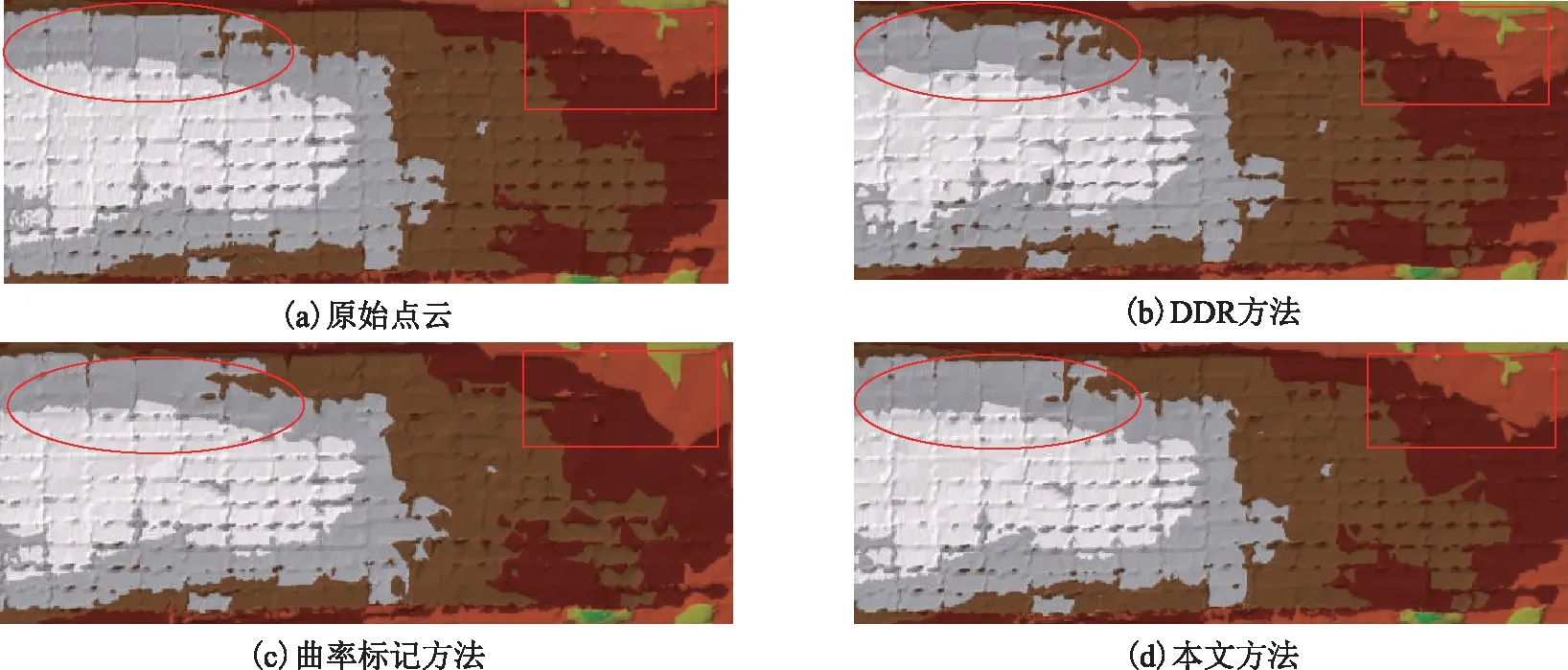
圖9 路段Ⅱ精簡后人工修補區域三角面片重建效果
三種基于特征保留的精簡方法仍存在遺漏情況,個別裂縫位于掃描線之間,坑槽被異物覆蓋,輕微破損等。為了評估特征保留率,選取長距離單車道路面點云進行實驗,局部結果如圖10所示。可以看出,保留特征點數接近的情況下,對于整體破碎嚴重的中間車道,三種方法均能保留,從圖10(e)可以看出本文所提方法完整保留了路面邊界。對于其他類型破損,選取原始點云和全景以及特征保留后點云,通過人工判讀進行統計,根據式(13)評價路面精簡點云特征保留率(Keep),統計結果見表2。
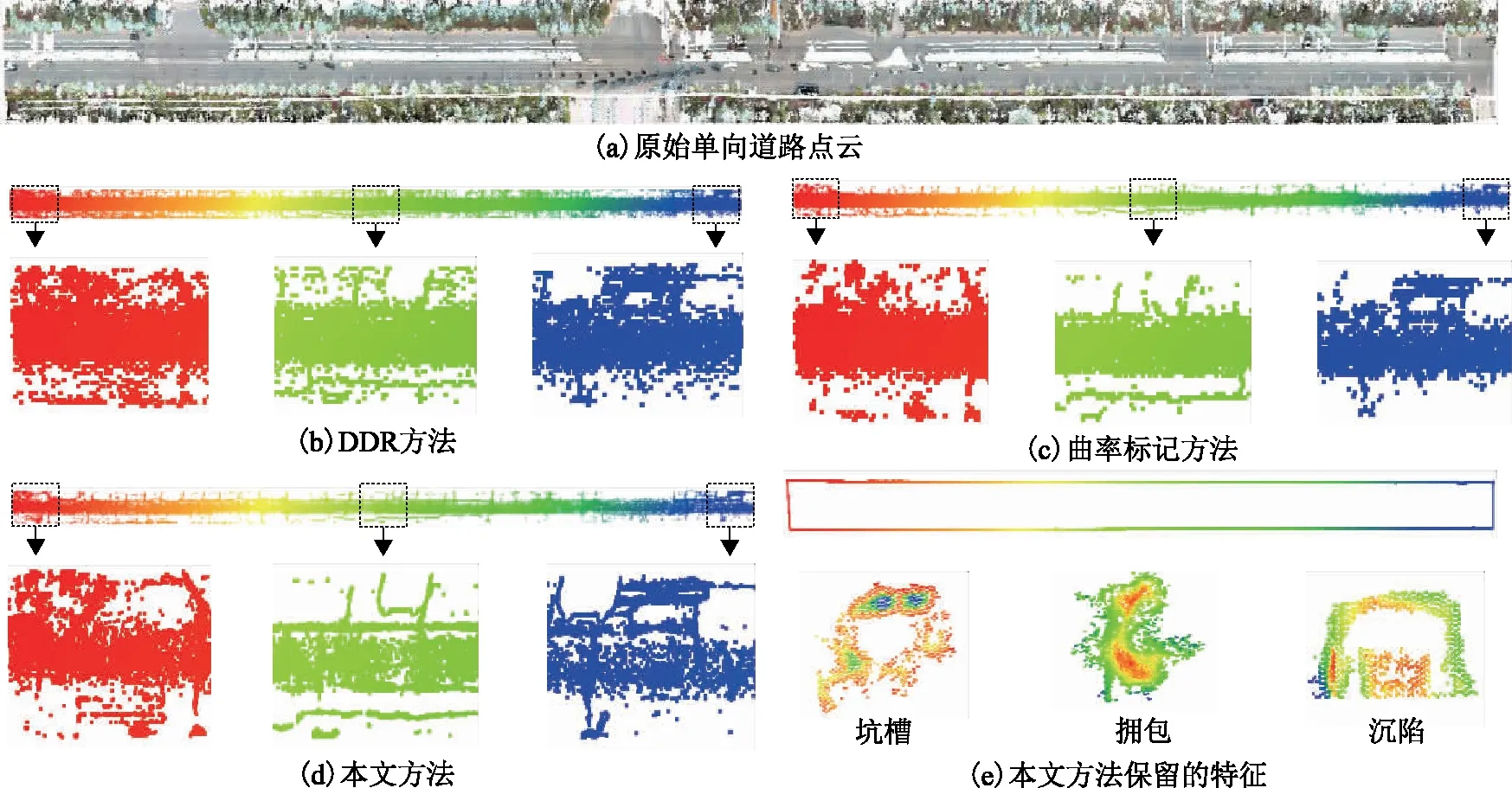
圖10 原始路面點云與特征保留結果

(13)
式中:TP為保留的破損數量:FN為未能保留的數量。
表2中的統計結果顯示:DDR以及曲率標記方法對路面擁包保留率較低,這是由于擁包在局部范圍呈緩慢變化,單一特征很難識別;三種方法中,本文所提出方法對不同破損特征保留效果最好,整體特征保留率達到92.04%,說明本文建立的多特征約束機制能夠保留不同類型的路面破損目標,為后續的路面破損狀況分析提供支撐,具有較強的適用性。

表2 路面特征保留結果定量分析
3 結束語
本文充分分析車載激光路面點云特征,提出一種多特征約束的路面點云精簡方法。實驗結果表明,該方法在保留路面主要目標的同時具有較高的精簡率。通過與其他方法進行對比,證明了本文方法的可靠性,路面精簡點云能夠支撐道路數字化管養發展需求。此外,該方法主要針對道路路面點云,未來將重點研究車載激光點云中非路面點云精簡方法。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
河南科技(2014年23期)2014-02-27 14:19:15