船載系泊狀態下基于原子重力儀的絕對重力測量*
2021-03-04 05:54:20程冰周寅陳佩軍張凱軍朱棟王凱楠翁堪興王河林彭樹萍王肖隆吳彬林強
物理學報 2021年4期
程冰 周寅 陳佩軍 張凱軍 朱棟 王凱楠 翁堪興王河林 彭樹萍 王肖隆 吳彬 林強
(浙江工業大學理學院,浙江省量子精密測量重點實驗室,杭州 310023)
重力場是反映地球質量分布及變化的重要參數, 動態重力測量在地質調查、地球物理、資源勘探等領域有著重要應用.目前動態重力測量均基于相對測量原理, 動態相對重力儀存在零點漂移問題, 影響其測量性能.動態絕對重力儀可以為相對重力儀提供同步同址校準, 解決其長漂問題, 因此備受關注.本文基于原子重力儀和慣性穩定平臺, 搭建了一套船載絕對重力動態測量系統, 并在船載系泊狀態下開展了絕對重力動態測量實驗.經評估, 船載系泊環境下的重力測量靈敏度為16.6 mGal/Hz–1/2, 1000 s 積分時間內重力測量的分辨率可達0.7 mGal.通過兩周的絕對重力測量, 評估了系統的穩定性.為了評估絕對重力的動態測量精度, 將船上測量點與碼頭高精度絕對重力基準點的絕對重力值進行了比較, 兩點之間的絕對重力值差及其不確定度評估結果為(–0.072 ± 0.134) mGal.本文結果為海洋相對重力儀的同時同船校準提供了一種新方案.
1 引 言
重力場的精密測量對基礎地質勘察、礦產資源勘探、地球物理研究、地震火山監測、大地水準面繪制、慣性匹配導航等具有重要的意義.靜態重力測量雖然精度很高(微伽(10–8m/s2)量級), 但不適合在野外進行大面積測量.動態重力測量是在移動載體(輪船、飛機等)上開展重力測量, 可適用于野外復雜地形情況下的重力場測量, 效率較高、測量速度較快, 精度一般在毫伽(10–5m/s2)量級, 譬如海洋及航空重力測量是區域重力場調查的常見方式.然而, 動態重力測量目前均為相對重力測量,測量的是運動載體相對固定絕對重力基準點的重力值變化.相對重力測量過程中的儀器零點漂移問題影響最終的測量性能, 將絕對重力儀應用于移動載體進行動態測量, 可以為動態相對重力儀提供同址校準, 為解決儀器長期漂移問題提供了一種新思路.
目前高精度絕對重力測量主要有兩種方式: 激光干涉和原子干涉.激光干涉式絕對重力儀一般適用于定點靜態測量.雖然研究人員曾采用改進方案進行了初步的動態測量可行性驗證試驗[1], 但因自由下落載體(角錐反射鏡)受到動態環境干擾影響較大, 最終的測量結果不太理想, 后續也鮮有文章報道.原子干涉式絕對重力儀[2](原子重力儀)是近三十年來快速發展起來的一種新型重力測量設備,它利用激光冷卻后的冷原子團作為落體, 并基于物質波干涉測量重力加速度.早期, 原子重力儀由于體積大、質量重、功耗高、可搬運性差等因素, 只能在實驗室靜態環境下工作[3].近年來, 隨著技術的快速發展, 原子重力儀的小型化進展較快[4?10], 其技術成熟度得到大幅提高; 原子重力儀逐漸參與到國際頂尖的絕對重力比對活動中來[11?14], 其靜態測量性能可與現有最好的光學干涉式絕對重力儀相媲美[11,14,15], 且相關的野外靜態測量實驗正在逐漸被報道[16?20].在動態實驗方面, 研究人員在慢速卡車[21]、移動電梯[22]、0-g 飛機[23,24]、超音速火箭[25]以及空間站[26]上基于原子干涉裝置進行了初步的實驗, 然而這些實驗數據相對比較粗糙, 并未獲得精確的重力場數據.近兩年, 基于同一套原子重力儀,法國的Bidel 研究小組[16,17]在海洋船載及航空機載環境下分別開展了絕對重力測量實驗研究; 最終評估的測量精度分別約為1.0 mGal[16]和1.7 mGal[17].該精度與現有海洋及航空相對重力儀的測量精度相當, 這些實驗結果為開展動態高精度絕對重力測量提供了新思路和新方案.
本文首先介紹了基于原子重力儀開展動態絕對重力測量的基本原理.在此基礎上, 報道了本研究小組新搭建的一套船載絕對重力測量系統, 并對其主要系統組成進行了闡述.進一步對野外船載的測量條件、測試環境等進行了介紹, 并在野外船載系泊狀態下開展了絕對重力動態測量實驗, 分析了動態絕對重力的測量結果.經評估, 重力測量的靈敏度可達16.6 mGal/Hz–1/2; 通過與碼頭高精度絕對重力基準點進行比較, 得到的最終測量結果為(–0.072 ± 0.134) mGal.本文結果為開展船載動態絕對重力測量及同船重力校準提供了一種新的方案.
2 動態絕對重力測量系統原理
如圖1 所示, 動態絕對重力測量系統主要由原子重力儀、慣性穩定平臺和集裝箱組成.其中, 原子重力儀剛性固定在慣性穩定平臺上部, 慣性穩定平臺放置于集裝箱內部.原子重力儀是整個測量系統的核心, 主要用于測量垂向的重力加速度; 慣性穩定平臺用于實現原子重力儀的姿態控制, 使其在船載系泊動態環境下仍處于垂線方向; 集裝箱主要用于溫濕度控制, 為整個外場實驗提供一個良好的測量環境.
動態絕對重力測量的原理是利用原子重力儀測量垂向的總加速度, 并基于高精度加速度計實時測量載體的干擾加速度, 組合成一套混合加速度測量系統.動態環境下, 基于高精度加速度計的信號和原子干涉儀的權重函數分離振動對原子重力儀的影響, 最終實現干擾加速度的分離和重力加速度信息的獲取.
原子重力儀的測量原理很多文章中都有闡述[3,27], 下面結合本文實驗進行簡要描述.原子重力儀的基本原理是利用激光冷卻技術制備一團冷原子, 把它作為落體, 利用原子物質波干涉的方法精密測量落體的垂向加速度.如圖1 所示, 首先基于二維磁光阱(2D-MOT)制備一團扁平的冷原子,通過水平的推送光將其快速輸送至三維磁光阱(3D-MOT).隨后, 關斷光場和磁場, 讓原子在重力場中自由下落, 并利用微波和拉曼選態脈沖實現量子態的制備.進一步, 通過作用三束多普勒敏感的拉曼激光脈沖( π /2 ?π ?π/2 ), 實現原子物質波的分束、偏轉以及合束, 形成一個物質波干涉儀.最后, 基于時間飛行法(TOF)探測原子的熒光信號,實現歸一化探測, 在原子干涉儀的輸出端, 原子的布居數 P 可以表示為
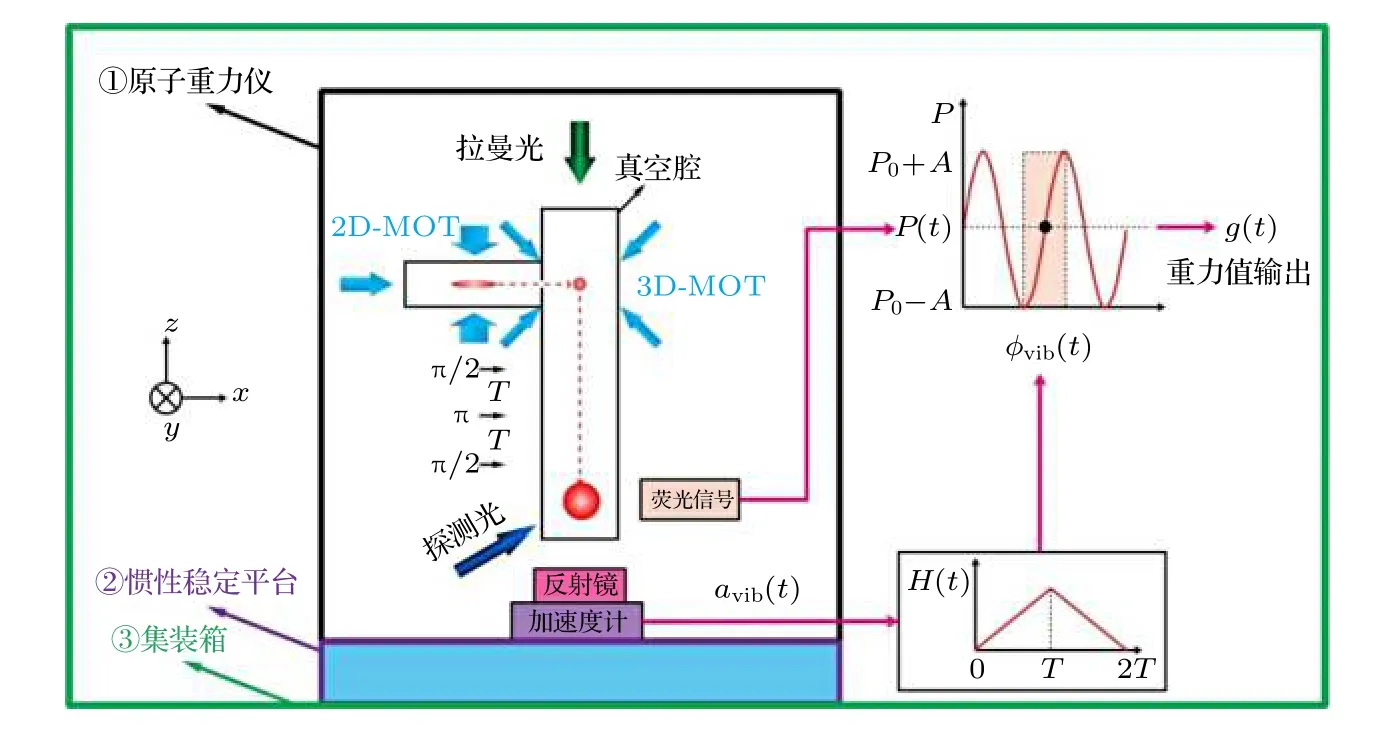
圖1 船載系泊狀態下的絕對重力測量系統原理圖Fig.1.The schematic diagram of absolute gravity measurement system under mooring state of a ship.

其中 P0, A , ? 分別是原子干涉條紋的直流量、對比度和相位.原子干涉條紋的相位φ=(keff·g ?α)T2+φVib, 其中 keff是拉曼光束的有效波矢, 其大小約為4π/λ , λ 是激光波長(約為780 nm); g 是重力加速度; α 是用于補償重力誘導的多普勒頻移的拉曼光掃頻啁啾率, T 是兩束拉曼脈沖之間的時間間隔;?Vib是拉曼反射鏡振動引起的干涉條紋相移, 可寫為

其中 H (t) 為原子干涉儀的靈敏度函數, aVib(t) 為拉曼反射鏡的實時振動加速度.
實驗中, 通過掃描 α 得到原子布居數信號; 通過高精度加速計采集拉曼反射鏡的振動加速度aVib(t) , 通過(2)式得到 ?Vib, 最終還原原子干涉條紋; 通過擬合得到原子干涉條紋相位, 從而精確提取重力加速度信息.
3 實驗系統及實驗過程
實驗系統的示意圖如圖2 所示.整個測量系統主要包括三個部分: 原子重力儀、慣性穩定平臺、輔助單元, 系統整體集成在一個20 英尺的集裝箱內(外部尺寸為5.89 m × 2.35 m × 2.39 m).下面分別對系統的各個部分進行簡要介紹.

圖2 實驗系統的示意圖Fig.2.The schematic diagram of the experimental system.
原子重力儀是測量的核心, 本文采用課題組較為成熟的小型化原子重力儀, 先前文章已有詳細介紹[10,19,28], 在此只對原子重力儀的改進部分做簡要介紹.為了適應野外碼頭的惡劣溫度環境, 改進了原子重力儀的光學單位, 激光器和小型化光路都增加了溫控, 使其處于恒溫狀態.為了進行動態測量,將拉曼光反射鏡固定在高精度加速度計上部, 并將整個裝配體固定于慣性穩定平臺內框架的底部, 真空單元固定在內框架的上部.動態測量環境下, 慣性穩定平臺可以維持真空腔和拉曼反射鏡處于垂線方向.為了減小干擾力矩, 實現了電控單元與慣性穩定平臺兩部分的總線整合.
慣性穩定平臺主要用于隔離外界的角運動干擾, 實現地理坐標系的跟蹤與定位, 保持原子重力儀的真空單元處于垂線方向.輔助單元主要用于集裝箱內部的溫濕度控制、船體姿態參數的測量、整個系統的供電.為了適應碼頭的惡劣環境, 基于空調控制集裝箱內部的溫度和濕度, 在外場測試的兩周內, 集裝箱內的溫度一般維持在25 ℃以下(外界溫度變化范圍約30 ℃—45 ℃), 濕度控制在70%以內(外界濕度變化范圍約85%—90%).此外, 在集裝箱的頂部集成了一套差分GPS(測高的精度在厘米級), 用于測量船體的高度信息.最后, 基于不間斷電源(UPS)為空調、原子重力儀、慣性穩定平臺等設備提供供電, 以維持整個測量系統正常運行.
船載系泊狀態下的實驗過程如下: 首先啟動慣性穩定平臺, 20 min 預熱后進入工作狀態, 原子重力儀的真空單元此時處于垂線狀態.其次, 調試原子重力儀使其處于工作模式, 通過測量不同T 下的原子干涉條紋, 粗略得到絕對重力值.通過長掃實驗可以精確評估絕對重力值, 基于差分GPS 和氣壓計實時記錄船體的高度以及外界的氣壓數據,以便于后期進行系統效應修正.
4 船載系泊狀態下的絕對重力測量結果及分析
4.1 測試環境
本次實驗在浙江省舟山市某碼頭進行, 測試船停靠碼頭, 處于系泊狀態.圖3 紅色虛線框內為測試用集裝箱, 集裝箱內為船載冷原子絕對重力測量系統.測試碼頭現有一個絕對重力基準點, 離船上測試位置約50 m, 可用于驗證測量到的絕對重力值.因實驗時間正值夏季, 碼頭測量環境較為惡劣,集裝箱表面溫度長期在45 ℃以上, 測量期間常有7—8 級大風, 時常有強降雨, 碼頭其他貨物裝卸活動也會對高精度重力測量產生影響.
由于船體始終處于運動狀態, 船體高度變化曲線如圖4(a)所示.實驗期間船體高度日均變化約為2.5 m.置于拉曼反射鏡下的高精度加速度計測量了船體的加速度噪聲功率譜, 如圖4(b)所示, 低頻0.2 Hz 有一個峰, 幅度超過10–2m/s2(1 Gal).

圖3 實驗測試現場圖Fig.3.The photo of the experimental test.

圖4 船載測量環境 (a)船體高度變化; (b)船體加速度噪聲功率譜Fig.4.The measuremental environment of the ship: (a) The variation of the altitude of the ship; (b) the noise power spectrum density of the acceleration of the ship.
4.2 船載系泊狀態下的絕對重力測量結果
在原子重力儀調試完成后, 開展絕對重力測量實驗.首先, 運行原子重力儀采集原子布居數信號(T = 10 ms); 同時, 基于拉曼反射鏡下的高精度加速度計記錄干擾加速度信號, 并同步傳給數據采集卡; 結合原子干涉儀的權重函數, 通過(2)式積分得到干擾加速度對原子干涉條紋的相位貢獻.利用該相位可以還原出原子干涉條紋, 如圖5 所示,藍色空心四邊形是實測的原始原子布居數信號, 黑色空心三角形是振動補償修正后的數據, 紅線是相應的擬合曲線, 通過擬合干涉條紋的相位最終提取重力加速度的信息.

圖5 原子干涉條紋信號(T = 10 ms).藍色空心四邊形:原始原子布居數信號; 黑色空心三角形: 振動修正后信號;紅線: 擬合曲線Fig.5.The signals of atomic interference fringes (T =10 ms).Blue dots: The original signals of atomic population; Black dots: The signals after vibration correction; Red line: the fitted curve.
在恢復原子干涉條紋后, 進一步開展系泊狀態下的短期連續重力測量實驗.圖6 所示為連續5 個多小時的測量數據, 灰點為實測原始數據, 紅線為8 min 移動平均后的數據, 測量數據已經修正潮汐和船體高度變化引起的時變重力值.由實驗數據可知, 重力值變化的峰峰值約為80 mGal, 測量值無明顯漂移.計算這些數據點的艾倫偏差(如圖7 所示),可評估重力測量的靈敏度, 約為16.6 mGal/Hz–1/2,1000 s 積分時間內重力測量的分辨率可達0.7 mGal.
在重力測量的靈敏度性能評估之后, 開展了絕對重力測量實驗, 并對系統的測量不確定度進行了分析和評估.與先前文章類似[28], 首先通過傾斜調制實驗找到垂線方向, 再通過掃描不同T 下的原子干涉條紋提取暗條紋位置, 最終獲得絕對重力數據.經過近兩周的測量, 數據如圖8 所示, 絕對重力值變化的峰峰值約為0.5 mGal, 所有數據統計的標準偏差約為0.130 mGal (A 類不確定度 ?A).B 類不確定度主要包括原子重力儀系統修正的不確定度和外界環境參數修正的不確定度.原子重力儀系統修正主要包括雙光子光移、科里奧利力、拉曼光波前等, 本文中使用的原子重力儀, 其系統效應修正的不確定度為0.010 mGal, 詳細的評估參見課題組先前已發表文章[13,19,20]; 外界環境參數修正包括固體潮、極地運動、氣壓等, 固體潮采用理論模型進行修正, 不確定度一般小于0.005 mGal.極地運動利用極地參數進行計算, 不確定度小于0.002 mGal.氣壓是根據實時的實測數據進行修正, 不確定度小于0.002 mGal.為了與碼頭絕對重力基準點進行比較, 還需將船上測量點的絕對重力值歸算到同一測量高度, 鑒于差分GPS 的高度測量分辨率約為5 cm, 基于自由空間垂向重力場梯度的理論值0.3086 mGal/m, 評估的高度修正的不確定度為0.015 mGal.最終合成的B 類不確定度 ?B約為0.019 mGal.因此, 船上測量點動態重力測量的合成不確定度約為0.131 mGal.

圖6 系泊狀態下的連續重力變化數據.灰點: 原始重力數據; 紅線: 移動平均后的數據Fig.6.The continuous changes of gravity under mooring state of a ship.Grey dots: The original data of measured gravity; Red line: The data after the dealing of moving average.

圖7 船載系泊狀態下的重力測量靈敏度評估Fig.7.The sensitivity evaluation of measured gravity data when the ship is moored.

圖8 絕對重力測量值的長期穩定性評估Fig.8.The estimation of long-term stability for the measured absolute gravity values.
碼頭絕對重力基準點的測量不確定度 ?ref為0.030 mGal, 將船上測量點的絕對重力值歸算到碼頭絕對重力基準點的高度, 可以進行粗略的比較.考慮到碼頭絕對重力基準點與船上測量點水平相距50 m 左右, 整個碼頭離岸邊約150 m, 周圍較為空曠, 因此兩點的垂向重力場梯度值變化不大,因此本文忽略由垂向重力場梯度異常引入的不確定度修正.
本文實驗初步驗證了船載系泊狀態下, 基于原子干涉技術開展動態絕對重力測量的方案具有可行性.該實驗系統未來有望為海洋相對重力儀提供一種新的校準方法, 在碼頭或者停船狀態實現同時同船高精度校準, 為抑制相對重力儀的零點漂移、開展遠洋長航時重力場測繪提供了一種校準方案.
5 結 語
本文搭建了一套船載絕對重力測量系統, 由原子重力儀、慣性穩定平臺、差分GPS 測高儀、不間斷電源供電系統及溫控單元等組成.在野外船載系泊狀態下, 開展了絕對重力動態測量實驗研究.評估了測量船的振動噪聲水平, 發現振動噪聲主要集中在低頻0.2 Hz 附近, 幅度超過1 Gal.在碼頭惡劣環境下, 評估了集裝箱內的溫濕度控制性能, 溫度和濕度通常可控制在25 ℃和70%.隨后, 開展了船載系泊狀態下的短期重力連續測量, 5 個多小時測量時間內, 重力測量峰峰值變化為80 mGal,得到的重力值數據并無明顯漂移.經計算, 重力測量的靈敏度為16.6 mGal/Hz–1/2, 1000 s 積分內重力測量的分辨率可達0.7 mGal.最后, 通過與碼頭已知的高精度絕對重力基準點進行比較, 發現兩者的絕對重力值相符合, 約為(–0.072 ± 0.134) mGal.通過兩周的絕對重力測量實驗, 評估了儀器的絕對重力測量性能及其穩定性, 絕對重力值的峰峰值變化約為0.5 mGal, 測量不確定度為0.131 mGal.本文研究結果為海洋相對重力儀同船同址校準提供了一種新方案.
本項研究得到了中國自然資源航空物探遙感中心、自然資源部第二海洋研究所和杭州微伽科技有限公司的大力支持, 在此一并致謝!
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21