基于Adams獲取挖掘機斗桿的載荷時間歷程
2021-03-05 15:44:44耿澤楠程江源謝寶智
科技創新導報 2021年27期
耿澤楠 程江源 謝寶智


摘 要:工作裝置是挖掘機的主要執行機構,其中斗桿所受載荷復雜,易產生變形、斷裂與疲勞失效。針對某中型反鏟液壓挖掘機,使用SolidWorks對其工作裝置進行實體建模并裝配,導入Adams后施加合理的約束、驅動和挖掘阻力,對鏟斗挖掘時3個典型危險工況進行了動力學仿真模擬分析,得到斗桿各鉸點載荷時間歷程曲線和數據文件,為后繼的有限元強度分析與疲勞壽命預測提供了基礎數據。
關鍵詞:挖掘機 斗桿 動力學仿真 載荷時間歷程
中圖分類號:TU621 文獻標識碼:A 文章編號:1674-098X(2021)09(c)-0120-04
Acquisition of Load Time History of Excavator Bucket Rod Based
on Adams
GENG Zenan CHENG Jiangyuan XIE Baozhi
(Institute of Modern Equipment Manufacturing, Changzhou Institute of Industry Technology, Changzhou,Jiangsu Province, 213164, China)
Abstract: Working device is the principal executive mechanism of hydraulic excavator. Among them, bucket rod is prone to deformation, fracture and fatigue failure due to its complex external load. For a medium-sized backhoe hydraulic excavator, SolidWorks is used to model and assemble its working device. After importing Adams, reasonable constraints, driving and digging resistance are applied, and the dynamics of three typical dangerousworking conditions during bucket excavation are carried out. Through the simulation and analysis, the load time history curve and data file of each hinge point of the stick are obtained, which provides the basic data for the subsequent finite element strength analysis and fatigue life prediction.
Key Words: Excavator; Bucket rod; Dynamics simulation; The load time history
挖掘機的工作環境惡劣,其工作裝置的受力復雜多變,為確保正常施工,需要對重要構件進行強度、模態、可靠性和疲勞壽命的分析計算與實驗。載荷譜是進行以上研究的基礎與前提,一般需要實際工況的測試,將實測得到的載荷時間歷程進行處理、分析、統計,以圖表、數據和曲線的形式表現出來。但隨著科技的進步,計算機技術的高速發展,應用仿真計算可以獲得模擬真實工況下的載荷時間歷程,為利用有限元進行疲勞壽命分析和疲勞實驗快速地提供了數據支持,節省了成本與時間[1] 。
本研究以挖掘機的斗桿為分析對象,首先應用SolidWorks軟件建立挖掘機工作裝置的三維模型;其次導入到多體動力學軟件Adams進行動力學仿真,獲得了斗桿在鏟斗挖掘的3種典型工況下,5個鉸點位置的載荷時間歷程;最后保存為有限元分析軟件可使用的載荷文件,從而可進一步在有限元分析軟件中進行應力、應變以及疲勞壽命的評估分析和研究。
1 SolidWorks實體模型的建立
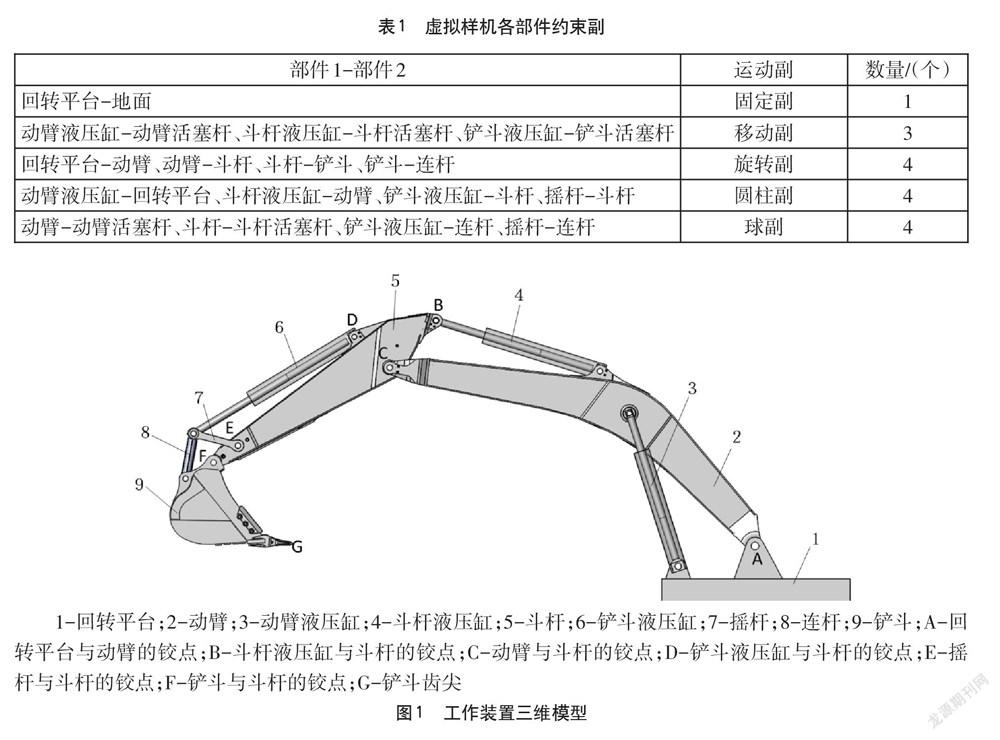
Adams提供了簡單的建模工具,但是與專業的三維建模軟件相比功能不強、操作也不方便。因此,選擇SolidWorks分別對回轉平臺、動臂、動臂液壓缸、斗桿液壓缸、斗桿、鏟斗液壓缸、搖桿、連桿、鏟斗建模,并裝配得到挖掘機的工作裝置,如圖1所示。然后導出成Adams可以導入的X_T格式文件。在裝配時,為減少
Adams的約束數量,節省計算資源,將沒有相對運動的構件組合成子裝配體;并使回轉平臺的底面與系統坐標系平面平行,避免在Adams中旋轉整個模型,保證重力的方向與工作裝置實際相符。
2 Adams虛擬樣機的建立
導入SolidWorks導出的工作裝置裝配體文件(X_T格式),選擇保留子裝配體選項。導入后進行前處理,
主要工作有:合并部件、修改部件名稱與顏色、設置材料與質量屬性,并檢查重力的方向。
導入Adams后,原SolidWorks中設置的各構件之
間的裝配關系全部消失,需要重新設置。Adams中是通過約束定義各構件之間的連接方式和相對運動方式,常用的是理想約束與虛約束。
在選擇運動副對挖掘機工作裝置進行約束時,常會出現冗余約束。雖然Adams系統會自動去除這些冗余約束,保證工作裝置模型有正確的自由度數,但為避免自動去除的約束中含有分析需要的約束,和因冗余約束過多導致仿真的意外中斷,應該透徹理解工作裝置中各部件之間的相互運動關系,以及Adams中各種運動副約束的自由度,通過選擇適當的約束形式主動消除冗余約束[2]。本虛擬樣機定義的約束副如表1所示。
最后,得到虛擬樣機的模型驗證信息,如圖2所示。其中,沒有冗余約束,剩余的3個自由度將分別由3個液壓缸的移動副驅動來約束。此時,工作裝置的原動件數目等于自由度數且大于零,滿足機構具有確定運動的充分必要條件。
3工作裝置動力學仿真
3.1典型工況的選取
挖掘機在挖掘作業時顯然比行走狀態時承受的載荷大且復雜,因此選擇挖掘工況進行研究與分析。本文建立的挖掘機模型,鏟斗容積小于0.5m3,屬于中小型挖掘機,一般以鏟斗挖掘為主,因此,參照《液壓挖掘機結構強度試驗方法》(GB9141-88),選取了鏟斗挖掘時的3種典型危險工況,對斗桿進行受力分析。工況1:斗桿液壓缸全縮,鏟斗齒尖G、斗桿與鏟斗的鉸點F和動臂與車體的鉸點A在一條直線上,此時挖掘半徑最大。工況2:動臂液壓缸全縮,斗桿與鏟斗的鉸點F、動臂與斗桿的鉸點C和鏟斗齒尖G在一條直線上,且與斗桿液壓缸的軸線垂直,此時斗桿液壓缸的力臂最大。工況3:動臂液壓缸全縮,斗桿與鏟斗的鉸點F、動臂與斗桿的鉸點C和鏟斗齒尖G在一條直線上,且垂直于地面,處于最大挖掘深度。本文以第一種工況,挖掘機在最大挖掘半徑工作時為例,進行詳細闡述。
3.2 驅動設置
通過Adams中運動副運動(Joint Motion)定義3個移動副運動,采用Step函數按照一定的運動規律,驅動動臂液壓缸、斗桿液壓缸和鏟斗液壓缸依次或共同協調運動,實現各典型工況的運動模擬。工況1的動臂液壓缸、斗桿液壓缸和鏟斗液壓缸的驅動函數如表2所示。
如圖3所示,以上驅動函數實現了0~4s,3個液壓缸協同動作,挖掘裝置從初始位置先運動到工作位置,然后4~12s,鏟斗缸獨立運動完成挖掘工作。
3.3 挖掘載荷的確定與設置
鏟斗在挖掘時受到的挖掘阻力分為3個部分:物料自身的重力、法向挖掘阻力和切向挖掘阻力。其中,物料自身重力的方向為垂直向下,保持不變;法向挖掘阻力的方向始終指向鏟斗與斗桿的旋轉中心,切向挖掘阻力的方向與法向挖掘阻力垂直,且與鏟斗運動方向相反[3-7] 。在鏟斗挖掘過程中,隨鏟斗位置變化挖掘阻力的大小均隨之改變,在Adams中可通過 Step函數來施加變化的挖掘阻力。如表3所示,0~4s內沒有挖掘阻力;4~8s隨挖掘深度的增大,法向和切向挖掘阻力逐漸增大;8~12s因鏟斗挖掘深度減小,又逐漸減小到零。物料重力在挖掘的前半段時間0~8.2s內沒有作用在鏟斗上,挖掘到最深處后立即達到最大值,并保持到結束。
3.4 仿真
在虛擬樣機中正確設置好表2、表3的驅動與挖掘阻力Step函數后,分別在斗桿的5個鉸點B、C、D、E和F約束處添加力的測量,選擇幅值;運行仿真后,在后處理模塊PostProcessor中即可得到如圖4所示的斗桿5個鉸點在工況1時的受力隨時間變化的曲線,即載荷時間歷程曲線。
類似的方法,可得到斗桿5個鉸點在工況1時X方向、Y方向和Z方向的載荷時間歷程;以及工況2和工況3各鉸點的約束反力幅值和X、Y、Z這3個方向的載荷時間歷程。
3.5 輸出CAE載荷文件
在Adams/View界面選擇File菜單下的Export項,對話框中選擇FEALoads文件格式、有限元分析軟件名稱,并進行正確的相關參數設置,確定后便可以導出生成工況1下斗桿各鉸點的Abaqus載荷文件[8] ,供后繼的有限元分析導入使用。
4 結語
第一,利用SolidWorks建立了某中型挖掘機工作裝置的三維模型,同時進行了正確裝配與坐標系調整,導出了Adams可以導入的X_T格式文件。
第二,編寫了鏟斗挖掘時3種工況的驅動函數和載荷函數,運用Adams完成了剛體動力學分析,能更加準確的反映挖掘機在工作時真實運動和受力情況。
第三,通過仿真,得到了挖掘機斗桿各鉸點在鏟斗挖掘時,3種典型危險工況下的載荷文件,對機械結構和零件的后繼分析與改進,提高工作裝置的強度與壽命,有著決定性的作用。
參考文獻
[1] 章翔.液壓挖掘機工作裝置剛柔耦合仿真與疲勞壽命研究[D].武漢:武漢科技大學,2017.
[2] 王健,王虎奇.8t液壓挖掘機工作裝置的運動仿真[J].廣西科技大學學報,2019,30(1):90-95.
[3] 李泉儒.基于ADAMS的液壓挖掘機工作裝置仿真分析[D].西安:長安大學,2018.
[4] 張衡.基于ADAMS的機械臂仿真分析[J].科技資訊,2018,16(21):76,78.
[5] 唐晶磊,呂勛國.基于ADAMS的液壓挖掘裝置動力學仿真分析[J].內燃機與配件,2022(3):38-40.
[6] 於來玲,殷晨波,陳長林,等.液壓挖掘機動力學仿真與試驗分析[J]. 機械制造與自動化,2021,50(6):118-122.
[7] 潘高.基于ADAMS的液壓挖掘機鏟斗機構優化[J].科技與創新,2021(22):65-67,70.
[8] 董正榮.液壓挖掘機工作裝置三維數模開發及聯合仿真優化[D].長春:吉林大學,2019.