改進永磁同步電機無速度傳感器控制仿真
2021-03-07 03:17:34朱國慶
裝備維修技術 2021年46期
摘 ?要:在永磁同步電機(PMSM)精確控制的場合,需要安裝位置傳感器來得到轉子的位置信息。為了降低成本,減小測速帶來的干擾,提高系統可靠性,對PMSM采用無速度傳感器控制。基于PMSM本身數學模型,設計了模型參考自適應轉速辨識控制策略,實現了PMSM的速度估計。為了實現良好的抗干擾和跟蹤性能,提出了模糊PI模型參考自適應速度估計方法。仿真結果表明,該方法可實現穩定的無速度傳感器控制,實現轉子位置的正確估計。
關鍵詞:PMSM;矢量控制;磁場定向;無速度傳感器:模型參考自適應;模糊控制
中圖法分類號:TP391 ?文獻標志碼:A
引言
PMSM采用全封閉結構,損耗少,效率高,省去了齒輪箱,可靠性大大提高,極大節約了電機維護的人力和時間[1]。我國又是“稀土王國”,盛產永磁材料。因而作為機電能量的轉換器件,PMSM脫穎而出在工業驅動領域,交通運輸、油田和冶金系統得到廣泛應用[2]。
隨著PMSM 的應用范圍不斷擴大,對PMSM運行性能的要求越來越苛刻,對PMSM的控制提出了更高的要求。傳統的PMSM控制大多采用基于轉子磁場定向的矢量控制方法,這需要在PMSM轉子上安裝精度高的編碼器來檢測轉子的位置,這增加了PMSM系統的不穩定性和系統成本。因此,無速度傳感器控制方法被大量學者研究。常用的速度估計控制方法包括注入高頻信號法,狀態觀測器法,滑模觀測器法和神經網絡等智能算法[3]。
本文基于PMSM的本身模型,建立了參考模型和可調模型,實現了無速度傳感器控制。通過PI參數的在線調整,提出了模糊PI控制策略。對比分析了該控制方案的優越性。
1 在dq坐標系下的模型參考自適應控制
在dq同步旋轉坐標系下,表貼式三相PMSM采用轉子磁鏈定向的矢量控制時的模型為:
作者簡介:朱國慶(1972 -),男,安徽安慶人,大學本科,工程師,主要研究方向:控制技術、物流技術改造。
(1)
其中
(2)
式中:q、d下標表示交軸、直軸分量,i表示定子電流,u表示定子電壓,Rs為定子電阻, 表示定子磁鏈, 為交軸、直軸電感, 為永磁體磁鏈,p為微分算子, 為轉子電角速度。
將式(2)代入式(1)得電流方程的形式為:
(3)
首先定義如下:
(4)
對式(3)作出進一步的變形
(5)
式(5)可以表達為狀態空間的形式,即
(6)
狀態空間表達式式(6)中包含轉子速度的信息,是轉速辨識的基礎。將三相PMSM本體作為參考模型,將式(6)作為可調模型,其中 為要辨識的參數[4、5]。
對式(6)用估計值表示,得到:
(7)
在dq同步旋轉坐標系下,廣義的電流誤差定義為:
將式(6)和式(7)兩式相減得到:
(8)
上式中
轉速估計依據波波夫穩定理論,選擇常規PI自適應控制器,可得估計速度式為:
(9)
其中 為常規PI調節器的比例與積分系數。
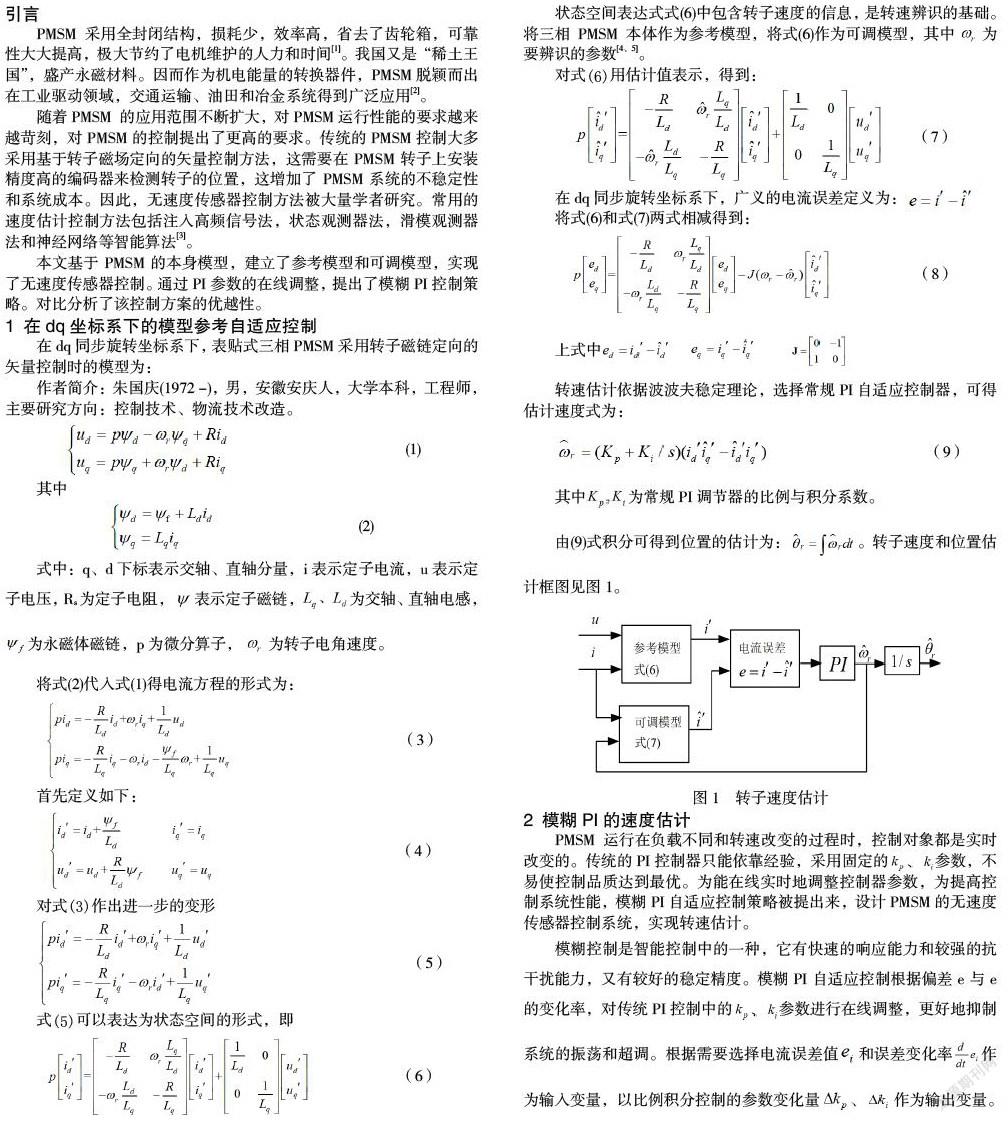
由(9)式積分可得到位置的估計為: 。轉子速度和位置估計框圖見圖1。
2 模糊PI的速度估計
PMSM運行在負載不同和轉速改變的過程時,控制對象都是實時改變的。傳統的PI控制器只能依靠經驗,采用固定的 參數,不易使控制品質達到最優。為能在線實時地調整控制器參數,為提高控制系統性能,模糊PI自適應控制策略被提出來,設計PMSM的無速度傳感器控制系統,實現轉速估計。
模糊控制是智能控制中的一種,它有快速的響應能力和較強的抗干擾能力,又有較好的穩定精度。模糊PI自適應控制根據偏差e與e的變化率,對傳統PI控制中的 參數進行在線調整,更好地抑制系統的振蕩和超調。根據需要選擇電流誤差值 和誤差變化率 作為輸入變量,以比例積分控制的參數變化量 、 作為輸出變量。如圖2所示為具體的結構控制圖。
將輸入和輸出的變化范圍定義為模糊集上的論域, 、 和 、 的論域都取為:
{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
設輸入(用e、ec表示)和輸出的隸屬度函數曲線為三角形,語言變量的隸屬度函數表示為{NB、NM、NS 、ZE、PS 、PM、PB},如圖3所示。
利用加權平均法實現反模糊化,表達式為:
(10)
實際的輸出控制量用x0與量化因子相乘得到。
3仿真實驗
在Matlab/Simulink中,建立PMSM在d-q坐標系下的仿真模型進行轉速估計。仿真對比了傳統PI和模糊PI的系統控制性能,仿真中PMSM的參數為表3所示:
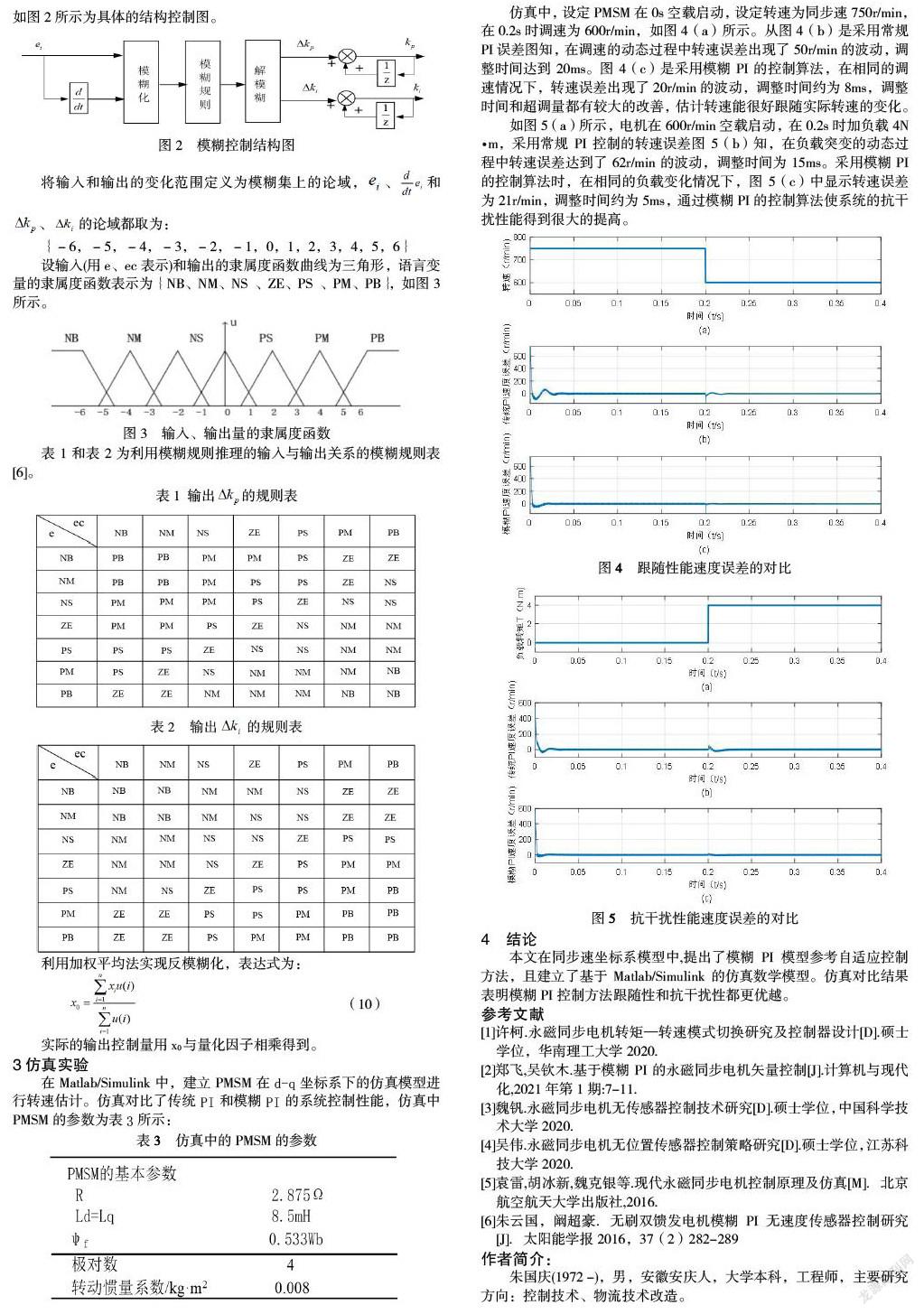
仿真中,設定PMSM在0s空載啟動,設定轉速為同步速750r/min,在0.2s時調速為600r/min,如圖4(a)所示。從圖4(b)是采用常規PI誤差圖知,在調速的動態過程中轉速誤差出現了50r/min的波動,調整時間達到20ms。圖4(c)是采用模糊PI的控制算法,在相同的調速情況下,轉速誤差出現了20r/min的波動,調整時間約為8ms,調整時間和超調量都有較大的改善,估計轉速能很好跟隨實際轉速的變化。
如圖5(a)所示,電機在600r/min空載啟動,在0.2s時加負載4N·m,采用常規PI控制的轉速誤差圖5(b)知,在負載突變的動態過程中轉速誤差達到了62r/min的波動,調整時間為15ms。采用模糊PI的控制算法時,在相同的負載變化情況下,圖5(c)中顯示轉速誤差為21r/min,調整時間約為5ms,通過模糊PI的控制算法使系統的抗干擾性能得到很大的提高。
4 ?結論
本文在同步速坐標系模型中,提出了模糊PI模型參考自適應控制方法,且建立了基于Matlab/Simulink的仿真數學模型。仿真對比結果表明模糊PI控制方法跟隨性和抗干擾性都更優越。
參考文獻
[1]許柯.永磁同步電機轉矩—轉速模式切換研究及控制器設計[D].碩士學位,華南理工大學2020.
[2]鄭飛,吳欽木.基于模糊PI的永磁同步電機矢量控制[J].計算機與現代化,2021年第1期:7-11.
[3]魏釩.永磁同步電機無傳感器控制技術研究[D].碩士學位,中國科學技術大學2020.
[4]吳偉.永磁同步電機無位置傳感器控制策略研究[D].碩士學位,江蘇科技大學2020.
[5]袁雷,胡冰新,魏克銀等.現代永磁同步電機控制原理及仿真[M].北京航空航天大學出版社,2016.
[6]朱云國,闞超豪.無刷雙饋發電機模糊PI無速度傳感器控制研究[J].太陽能學報2016,37(2)282-289
作者簡介:
朱國慶(1972 -),男,安徽安慶人,大學本科,工程師,主要研究方向:控制技術、物流技術改造。
3788500589215
