基于模型補償自抗擾的彈體滾轉角控制策略
2021-03-09 07:38:00吳正平
探測與控制學報 2021年1期
吳正平,鄧 聰
(三峽大學電氣與新能源學院,湖北 宜昌 443002)
0 引言
干擾彈在作戰過程中,需要調整彈體的滾轉角去對準敵方武器并發出干擾信號,起到干擾作戰的功能[1]。彈體滾轉通道的穩定性與迅速調整滾轉角的能力是能夠實現干擾彈精確對準、穩定飛行控制的關鍵;但干擾彈現在所處的作戰環境也日益復雜,在飛行過程中,會受到各種各樣的干擾例如氣動摩擦產生的干擾力矩、電機軸承間的干擾等等。這些干擾力矩的存在,增加了彈體滾轉角控制的難度[2]。
文獻[3]提出了基于魯棒控制的策略,文獻[4]提出了雙閉環控制策略,文獻[5]提出了基于變結構控制的策略,雖然在理想的仿真環境下可以達到很好的控制效果,但在實際控制系統中,由于模型建立不精確以及未知擾動的存在,在實際運用中的效果難以保證。文獻[6]提出基于線性二次型調節器的滾轉控制方法,在擾動變化較大時會影響觀測器的精度,抗擾性不強,進而導致控制精度降低。文獻[7]提出了一種基于模糊控制的滾轉角控制策略,對控制器的參數進行在線調整,但隨著精度要求越高,模糊控制器的決策就越慢,有可能會導致無法實時控制的情況。
本文針對傳統控制策略存在的不足,提出了基于模型補償自抗擾的彈體滾轉角控制策略,通過對彈體滾轉角控制系統進行數學建模,建立擴張狀態觀測器,再將擴張狀態觀測器的觀測量作為模型已知信息,增加到干擾補償中,并分析了該控制策略的穩定性。
1 數學模型
1.1 彈體滾轉通道數學模型
本文的實驗對象彈體滾轉通道控制系統核心部件為反作用飛輪、滾轉本體(彈體)、旋轉翼等。反作用飛輪由伺服電機、伺服驅動器、角度檢測電路、反作用飛輪輪體等組成。
對彈體滾轉通道由角動量守恒定理可得:
(1)
式(1)中,Jb為滾轉本體的轉動慣量,a為摩擦系數,θ為滾轉角,Jw為反作用飛輪的轉動慣量,Ω為反作用飛輪角速度,Md為干擾力矩。
滾轉角串級控制系統結構框圖如圖1所示,其中θ0和θ分別是期望的滾轉角與實際的滾轉角,Tf1和Tf2都是干擾力矩。內環控制采用PD控制,達到快速控制的目的,外環使用模型補償自抗擾控制策略以滿足系統抗擾性、精確度的要求。

圖1 滾轉角串級控制系統結構框圖Fig.1 Structure diagram of roll angle cascade control system
1.2 擴張狀態空間表達式的建立
(2)

(3)
(4)
由此,建立了以反作用飛輪角加速度為控制量輸入,彈體滾轉角為輸出的系統擴張狀態空間表達式。下面根據以上系統,進行控制策略設計。
2 基于模型補償自抗擾的彈體滾轉角控制策略
傳統形式的自抗擾控制器設計,對系統數學模型并無過多的借鑒,只需知道系統的階數,進而設計高于系統一階的擴張狀態觀測器[8]。要想達到良好的控制效果,其中z3對總干擾f的準確估計是很重要的。傳統自抗擾控制中,當干擾出現劇烈的變化時,對擴張狀態觀測器來說是一個很大的挑戰,很可能精度降低甚至難以跟蹤。
2.1 滾轉角控制系統的模型補償自抗擾控制策略
由第一章中建立的數學模型可知,本系統的部分模型已知,可以補償到擴張狀態觀測器中來增加觀測器的穩定性。
由式(3)和式(4)建立模型補償的擴張狀態觀測器如下:

(5)
下面先進行觀測器的極點配置,將其極點配置在-ω0。
(6)
由式(6)即可得:l1=a+3ω0,l2=(3a+3)ω02+(3a2+3a)ω0+a3+a2,l3=ω03。
最后,基于模型補償的三階擴張狀態觀測器形式如下:
(7)
式(7)中,z1是對滾轉角的觀測,z2是對(a+1)倍的滾轉角速度的觀測,z3是對干擾f1的觀測。若能夠準確實現對每個狀態的觀測,設計如下控制器:
(8)
(9)
此時z3≈f+(b-b0)-az2,與傳統自抗擾控制相比,z3需要跟蹤的干擾量大大減小,跟蹤精度也會有所提升。
彈體滾轉角外環模型補償自抗擾控制系統結構框圖如圖2所示。
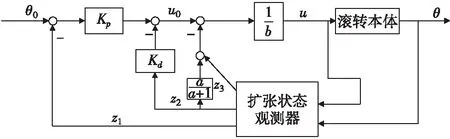
圖2 彈體滾轉角外環自抗擾控制系統結構框圖Fig. 2 Structural diagram of auto disturbance rejection control system for outer ring of rolling angle of projectile
2.2 收斂性與跟蹤誤差分析
由式(7)可求得z1、z2、z3的傳遞函數如下:
(10)

(11)
(12)

(13)

(14)
(15)
考慮到分析典型性,y、u均取幅值為K的階躍信號y(s) =K/s,u(s) =K/s, 則可以求得穩態誤差:
(16)
由式(16)可知,所設計的模型補償自抗擾控制策略具有很好的收斂性與跟蹤性能,能夠實現對系統狀態變量和擾動的無差估計。
3 仿真與實驗分析
3.1 Simulink仿真
為便于分析,由式(1)建立的數學模型在Simulink環境下搭建彈體滾轉角控制系統。系統所取參數為:反作用飛輪的轉動慣量Jw=0.078 kg·m2,滾轉本體的轉動慣量Jb=0.026 kg·m2,摩擦系數a=0.8。自抗擾控制器參數選取為:觀測器極點ω0=-10,控制器極點ωc=-8。在設定1 s時進行階躍輸入,2 s時有階躍干擾,有如圖3—圖5的仿真圖。
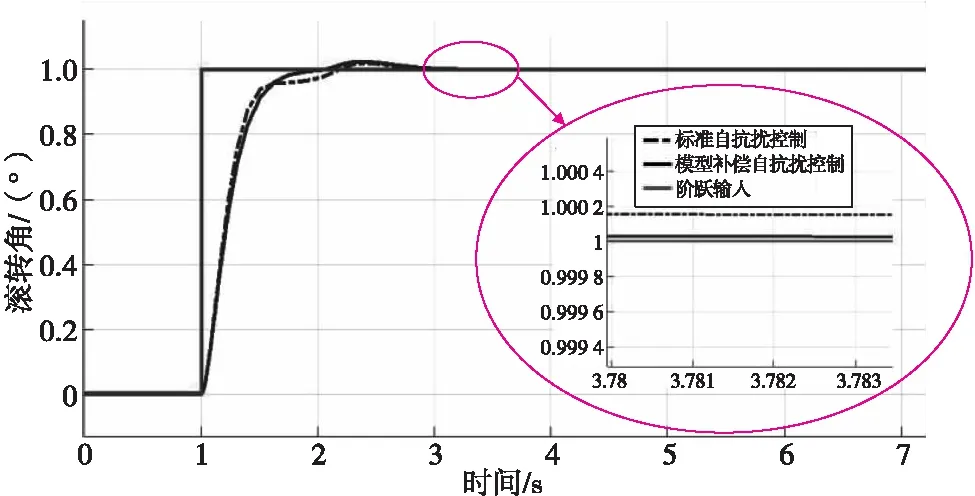
圖3 階躍輸入響應圖Fig.3 Step input response diagram
由階躍輸入響應圖3可知,模型補償自抗擾控制調節時間明顯比傳統自抗擾控制時間短,調節的精度也比傳統自抗擾控制高。
圖4是z1、z2跟蹤效果對比圖,由z1對滾轉角跟蹤圖4(a)、(b)可知,傳統自抗擾控制與模型補償自抗擾控制都可以很好實現對滾轉角的跟蹤。
由z2跟蹤圖4(c)、(d)可知,z2(模型補償自抗擾控制)對(a+1)倍滾轉角速度的跟蹤存在的誤差比z2(傳統自抗擾控制)對滾轉角速度的跟蹤誤差要小。

圖4 z1、z2跟蹤效果對比Fig.4 Comparison of tracking effect between z1 and z2

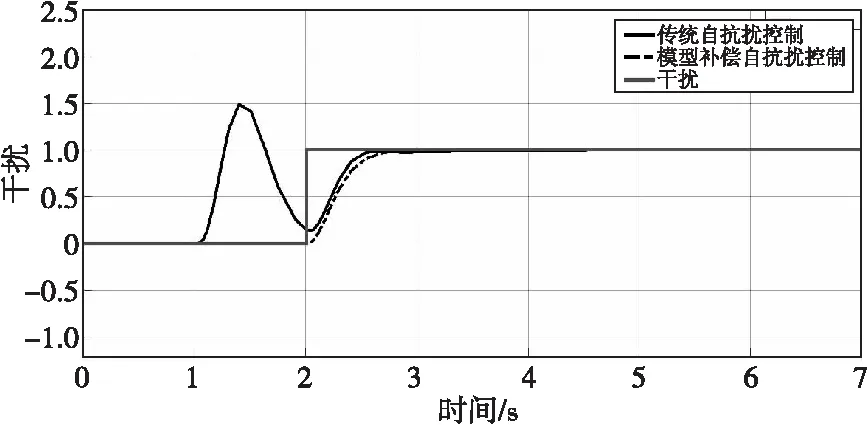
圖5 z3(對干擾的跟蹤)Fig.5 z3 (tracking interference)
3.2 彈體滾轉控制系統實驗
搭建如圖6所示系統實物圖,圖6中1是旋轉翼與反作用飛輪相連接,可增大其轉動慣量,2用來配置轉動慣量,與實際被控對象的轉動慣量一致。進行了連續50°階躍輸入實驗。圖7是狀態曲線圖,圖8是系統響應曲線圖。由圖可見基于模型補償的自抗擾控制可以達到對彈體滾轉角控制的精度、抗擾性的要求。

圖6 系統實物圖Fig.6 Physical system diagram
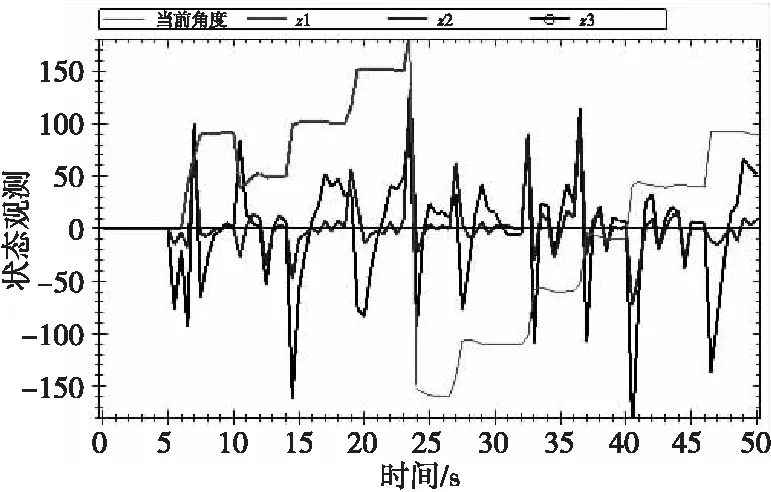
圖7 狀態曲線圖Fig.7 State curve

圖8 系統響應曲線圖Fig.8 System response curve
4 結論
本文提出了基于模型補償自抗擾的彈體滾轉角控制策略。該控制策略通過建立彈體滾轉角控制系統的數學模型,建立了以反作用飛輪角加速度為控制量輸入,彈體滾轉角為輸出的系統擴張狀態空間模型,進而建立了擴張狀態觀測器,并將觀測器的觀測值又作為已知模型信息,在控制器中對觀測的干擾進行補償。通過對收斂性與跟蹤誤差進行分析,證明了所設計的模型補償自抗擾控制具有很好的收斂性與跟蹤性能,能夠實現對系統狀態變量和擾動的無差估計。仿真實驗和實物實驗驗證結果均表明,本控制策略減小了系統調節時間與穩態誤差,大大增強了其抗擾能力與魯棒性,在工程領域具有較高應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03