改進Laplace的無人機圖像邊緣檢測算法研究
2021-03-09 07:56:18陳思吉王曉紅李運川
測繪工程 2021年2期
陳思吉, 王曉紅, 李運川
(1.貴州大學 礦業學院,貴州 貴陽 550025;2.貴州大學 林學院,貴州 貴陽 550025)
近年來,數字圖像處理一直是計算機視覺領域研究的熱點和重點,諸多學者圍繞數字圖像處理關鍵技術展開了研究,如薛賓田等提出基于LBP(Local Binary Patterns)紋理特征和Canny算子的視頻分割算法,該算法在背景光照發生變化且前景和背景交界處顏色相似時,具有明顯檢測優勢[1]。徐少平等提出基于深度置信網絡的隨機脈沖噪聲快速檢測算法,該算法在檢測準確率和執行效率兩個方面效果明顯[2]。馬瑪雙等人針對在光照變化和強陰影干擾條件下的道路邊緣檢測問題,提出一種對光照魯棒的道路邊緣檢測算法結合導向濾波和抗陰影特征提取器,首先,采用導向濾波對圖像的邊緣進行增強,減少背景噪聲干擾;其次,利用抗陰影道路特征提取器提取道路粗邊緣輪廓;最后,采用模糊聯通性分析,結合道路邊緣全局信息將道路邊緣分為遠、近兩部分,對提取的邊緣點進行修正,并采用RANSAC進行擬合,該算法在各種道路條件下,具有較好的魯棒性和準確性[3]。代文征等人針對現有梯度算子在圖像邊緣檢測中噪聲敏感問題,提出一種改進的高斯—拉普拉斯算子的噪聲圖像邊緣檢測方法,方法對傳統拉普拉斯算子進行改進,并結合高斯濾波器,應用高斯濾波器平滑圖像,從而達到抑制噪聲,最后在基于拉普拉斯梯度邊緣檢測器進行邊緣檢測,該方法在實際應用中能夠有效提高噪聲圖像邊緣檢測的質量[4]。張月圓等人針對經典邊緣檢測算法抗椒鹽噪聲性能較差及閾值選取適應性不強等問題,提出一種基于Canny的算法架構,結合自適應中值濾波(Adaptive Median Filtering, AMF)、大津法(Otsu)以及最大熵法(Maximum Entropy Method,MEM)的改進圖像邊緣檢測算法,算法在椒鹽噪聲干擾下針對背景復雜的圖像有更好的邊緣檢測效果[5]。本文針對常規邊緣檢測算法在檢測中因圖像灰度發生急劇變化而導致的“閾值檢測不敏感”現象,本文提出BRGB-ALaplace算法,其主要思路如下:將原始影像進行預處理,分別采用BRGB-ALaplace算法和幾種不同經典算法進行處理,對比分析各算法的優勢與不足并對其應用進行探討。
1 Laplace邊緣檢測算法及其原理
Laplace邊緣檢測算法作為一種數字圖像處理領域中常用的二階微分算法被廣泛應用于圖像邊緣檢測之中。在數字圖像處理理論中,邊緣是圖像的基本特征,圖像邊緣檢測的實質就是利用相關算法檢測圖像中目標對象與其背景之間分界線的過程,其主要的步驟可分為圖像分析、圖像識別、邊界重構和提取[6-7]。Laplace邊緣變換的實質就是對原始圖像進行銳化,使得圖像效果增強和灰度反差增強,使圖像變得清晰[8-10]。
Laplace邊緣變換函數是各向同性的二階導數,定義為:
(1)
其中
(2)
(3)
通過多種方式表達為數字形式,針對三階矩陣區域,更適用的形式表達為:
f(x)=4a5-(a2+a4+a6+a8).
(4)
數字形式的拉普拉斯要求系數之和為0,其關系矩陣可表達為:
利用Laplace邊緣變換函數在一階導數的極值位置,二階導數為0的特點作為檢測圖像邊緣的方法。但是,因其在二階導數的0值不一定都是邊緣,其模板和變形模板分別為G1和G2:
通過對圖像的Laplace邊緣變換,將原始影像銳化,進行微分運算,再把處理之后影像和原始影像進行疊加[11-13]。其Laplace的變換表示為:
(5)
式中:t為鄰域中心比較系數。
圖像灰度的變化情況可以用圖像灰度函數的梯度來進行反映[14],因此圖像的邊緣提取算法可以由圖像局部微分技術來得到,圖像的邊緣提取是圖像匹配的基礎,因為它是位置的標志,對灰度的變化不敏感,它可作為匹配的特征點[15-18]。
2 BRGB-ALaplace邊緣檢測算法
BRGB-ALaplace(Advanced Laplace based on RGB)邊緣檢測算法是和Canny邊緣檢測算法類似的多級檢測算法,此算法利用Laplace邊緣變換原理對原始圖像進行銳化處理,先將圖像進行高斯平滑濾波,把預處理圖像用拉普拉斯算子的模板處理之后,再對圖像進行歸化處理,分別基于RGB 3個相位分量方向進行拉普拉斯模板銳化拉伸,最后將3個分量進行重組,這樣得到的邊緣檢測結果不僅對灰度變化區域效果顯著,同時結果還含有少量紋理提取信息,兩者的組合對于邊緣檢測的表達效果更加顯著。
其原理同Laplace基本原理相似,區別在于將Laplace中的模板變換成了G(R)、G(G)和G(B)3個維度和F(X)、F(Y)信息:
BRGB-ALaplace邊緣檢測算法的規劃函數可表示為:
L=(G(R)+G(G)+G(B))×F(X)×F(Y)+ο(t).
(6)
其中,t為鄰域中心比較系數。
本文基于Laplace邊緣檢測算法改進得到的BRGB-ALaplace邊緣檢測算法所采用的技術路線如圖1所示。
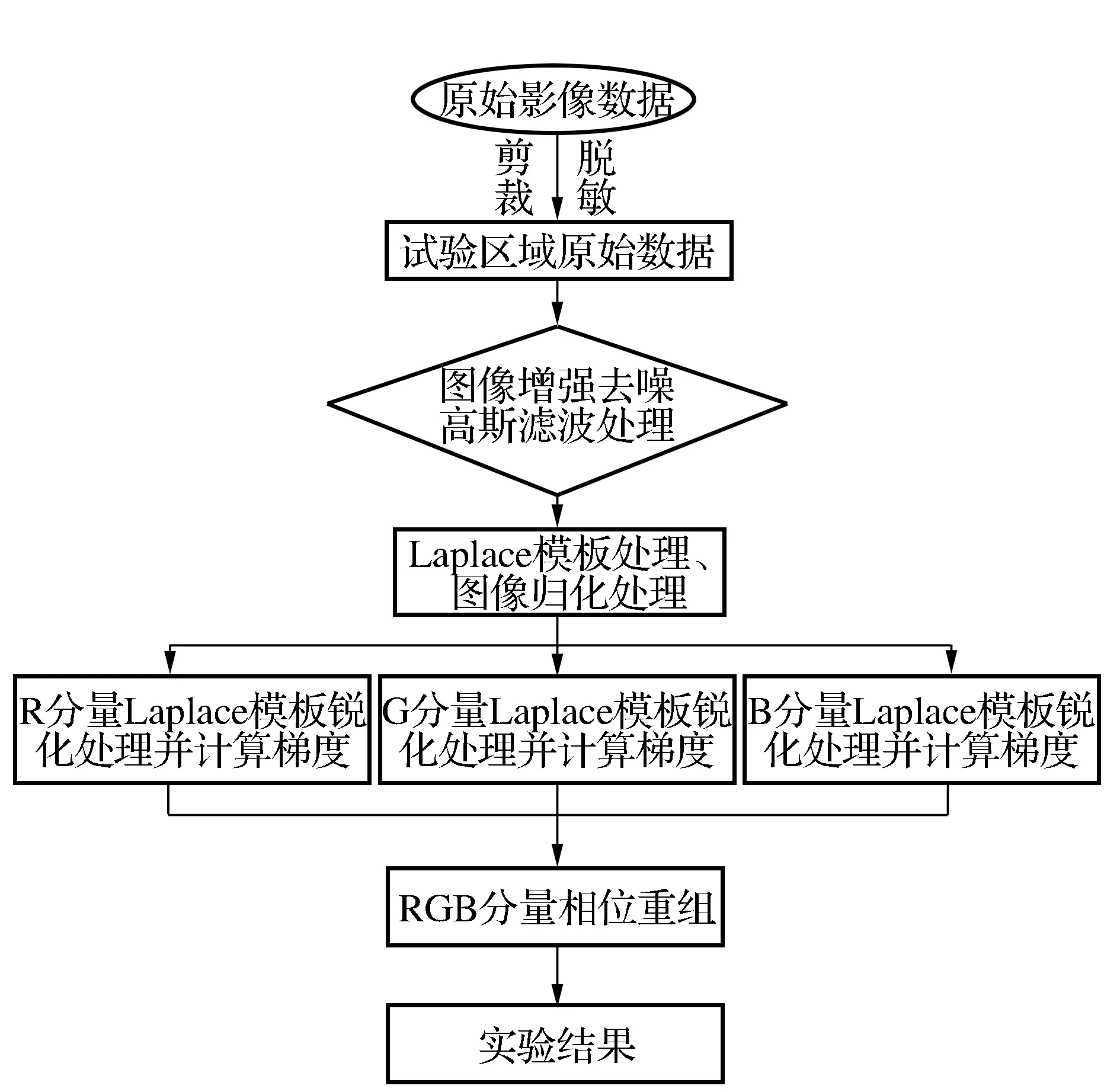
圖1 BRGB-ALaplace算法子實驗技術路線
3 實驗及其結果
3.1 實驗數據
實驗基于第三次全國土地調查的背景,利用三調統籌準備的部分脫敏數據進行圖像邊緣提取實驗及算法實現,結合三調和實驗的實際情況,選取局部影像進行實驗。數據已進行脫敏處理,數據中包含道路、建筑物、人工地物和植被等眾多信息,該實驗區域為第三次全國土地調查中常見地形地貌區域。
3.2 實驗及結果分析
3.2.1 RGB-ALaplace算法實驗結果與目視評價分析
實驗選取三調統籌無人機城區和山區房屋脫敏影像,通過Sobel算法、Roberts算法、Laplace算子、Prewitt算法、Canny算法、BRGB-ALaplace算法,在無噪與有噪兩種情況下開展圖像邊緣檢測實驗,對改進算法的魯棒性進行研究。
對上述算法的實驗結果進行對比分析,得到如下結論:
1)BRGB-ALaplace算法和經典Laplace邊緣檢測算法對比。如圖2和圖4實驗結果對比圖所示,對比改進算法子實驗結果圖2和圖3(g)、圖3(h)、圖3(i)和圖3(d)Laplace算法處理圖像實驗效果,不難發現Laplace算法處理圖像后的噪聲冗余信息多于改進算法;原因是Laplace算法進行邊緣檢測是n維歐幾里德空間中的一個二階微分算子,其檢測通道閾很窄,故其對邊緣信息較為敏感,其檢測部分邊緣可能為噪聲的邊緣,擁有高精度邊緣提取的同時,丟失了邊緣的方向信息,且加倍了噪聲對于檢測的影響。Laplace算法處理圖像實驗結果表明,其對于邊緣的細節檢測效果顯著。
本文算法在保留經典Laplace算法對噪聲敏感的優點基礎上,還對鄰域中心比較系數t分別以0.5和1為零界點進行分段,將中心領域進行分割處理,故其有效信息保留豐富且冗余噪聲信息較少,在檢測中對邊緣的定位較為準確,圖像處理效果明顯優于傳統的Laplace算法。
2)BRGB-ALaplace算法和其他經典邊緣檢測算法對比。如圖2和圖3實驗結果對比圖所示,改進算法子實驗結果圖2和圖3(g)、圖3(h)、圖3(i)分別和經典算法結果圖3(b)、圖3(c)、圖3(e)、圖3(f)進行對比,分析圖2(b)和圖3(b)Sobel算子處理圖像實驗結果發現其產生的邊緣有強弱,抗噪性好;圖2(c)和圖3(c)Roberts算法處理圖像處理實驗結果表明對于邊緣檢測時邊緣定位準確,可用于邊緣檢測的精確定位;圖2(e)和圖3(e)Prewitt算法處理圖像實驗顯示Prewitt算子是良好的噪聲抑制算子,可利用其機理對檢測邊緣的噪聲進行抑制;圖2(f)和圖3(f)Canny算法處理圖像實驗處理之后產生的邊緣很細。實驗結果表明,它具有良好的信噪比,定位精度和單邊緣響應也較好。
改進得到的BRGB-ALaplace算法進行邊緣檢測的基本原理與Laplace算法相似,區別在于作為一種多級檢測算法,分別基于RGB 3個相位分量方向進行拉普拉斯模板銳化拉伸,該實驗結果表明,處理之后的圖像其邊緣響應靈敏的同時定位精度也高,檢測出的邊緣清晰且具有少量紋理,可輔助模糊邊緣識別地物。
3)BRGB-ALaplace算法和其他經典邊緣檢測算法魯棒性分析。為驗證改進得到的BRGB-ALaplace算法的魯棒性,實驗將無人機城區房屋圖像和山區房屋圖像分別在無噪和有噪兩種情況下進行對比[19],對比圖2和圖3、圖4和圖5,明顯發現在同樣加入椒鹽噪聲的情況之下,經典算法中Sobel算法、Roberts算法、Laplace算子、Prewitt算法受到人為加入的椒鹽噪聲影響較為顯著,而改進得到的BRGB-ALaplace算法和Canny算法相較于其他算法受到椒鹽噪聲影響較小,簡而言之,改進得到的BRGB-ALaplace算法和Canny算法都具有良好的魯棒性,且BRGB-ALaplace算法的魯棒性優于Canny算法。

圖2 無噪無人機城區房屋圖像實驗結果
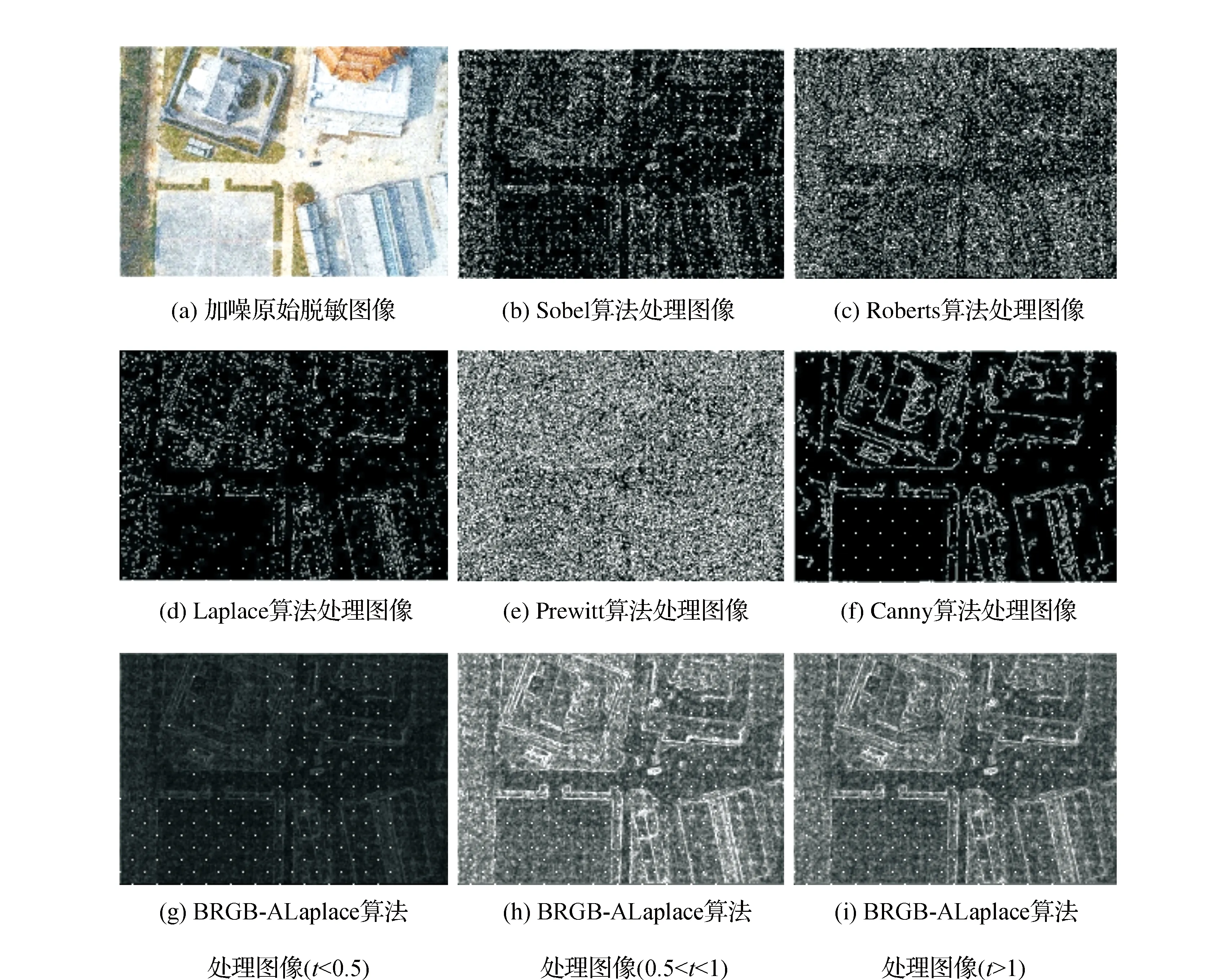
圖3 加噪無人機城區房屋圖像實驗結果

圖4 無噪無人機農村房屋圖像實驗結果

圖5 加噪無人機農村房屋圖像實驗結果
3.2.2 BRGB-ALaplace算法定量評價分析
實驗為評估所改進得到的BRGB-ALaplace算法的性能,在三調統籌無人機脫敏影像組中,選取8幅圖像進行實驗,將本文改進得到的新算法與前文提及的幾種常規算法進行比較,前文所提及圖2無噪無人機城區房屋圖像實驗結果即為三調統籌無人機脫敏影像組中8幅圖像之一的邊緣檢測結果。實驗基于MATLAB 2018B完成,計算機配置參數:Intel(R) Xeon(R) CPU E5-26200 @ 2.00GHz 2.00 GHz、8 GB RAM、64位Windows 10操作系統。
根據圖2結果顯示本文改進得到新算法和常規算法邊緣檢測輸出結果。分別對文獻[4]中所涉及的圖像峰值信噪比(PSNR)和原圖像與處理圖像之間均方根誤差兩種性能指標進行比較評估。PSNR是進行圖像質量最廣泛通用的客觀量化評價指標,最常被用于數字圖像處理的質量評價當中。圖像均方根誤差(MSE)表示原圖像和處理后圖像之間的均方誤差,是客觀評價PSNR的常見最簡單指標定義。
(7)
(8)
其中,It(M,N)為圖像邊緣檢測輸出結果;Ib(M,N)為地面真實圖像。
經過上述對比實驗之后,對實驗結果進行歸納統計。表1為文中邊緣檢測算法復雜程度匯總表,分別用階數、是否進行加法運算和乘法運算對文中涉及的相關邊緣檢測算法的復雜程度進行表達;表2為文中邊緣檢測算法運算時間匯總表,圖6算法運算時間,實際為將文中所涉及的各算法的運算時間進行表達;表3為文中邊緣檢測算法PSNR值匯總表,文中涉及的各算法圖像質量的PSNR值進行表達;表4為文中邊緣檢測算法MSE值匯總表,文中涉及的各算法原圖像和處理后圖像之間的均方誤差進行表達。
綜合表1、表2和圖6可以看出,Roberts算法和Prewitt算法較為簡單,均只進行加法運算,因此,其運算耗時最短,運算速度最快;而文中所涉及Sobel算法、Canny算法、Laplace算法和改進得到的BRGB-ALaplace算法均進行了加法運算和乘法運算,其運算結構相對于Roberts算法和Prewitt算法復雜,運算時間為兩種運算的總耗時,故其運算時間較長;而BRGB-ALaplace算法是基于Laplace算法基礎上進行改進,經拆分重組,故耗時會相較于Laplace算法略長,但總體來說,兩者在運算時間上相差無幾,且從表1看出,BRGB-ALaplace算法與除Roberts算法和Prewitt算法這兩種算法之外的其他幾種算法,在運算速度差異上并不顯著。

表1 文中邊緣檢測算法復雜程度匯總表

表2 文中邊緣檢測算法運算時間匯總表
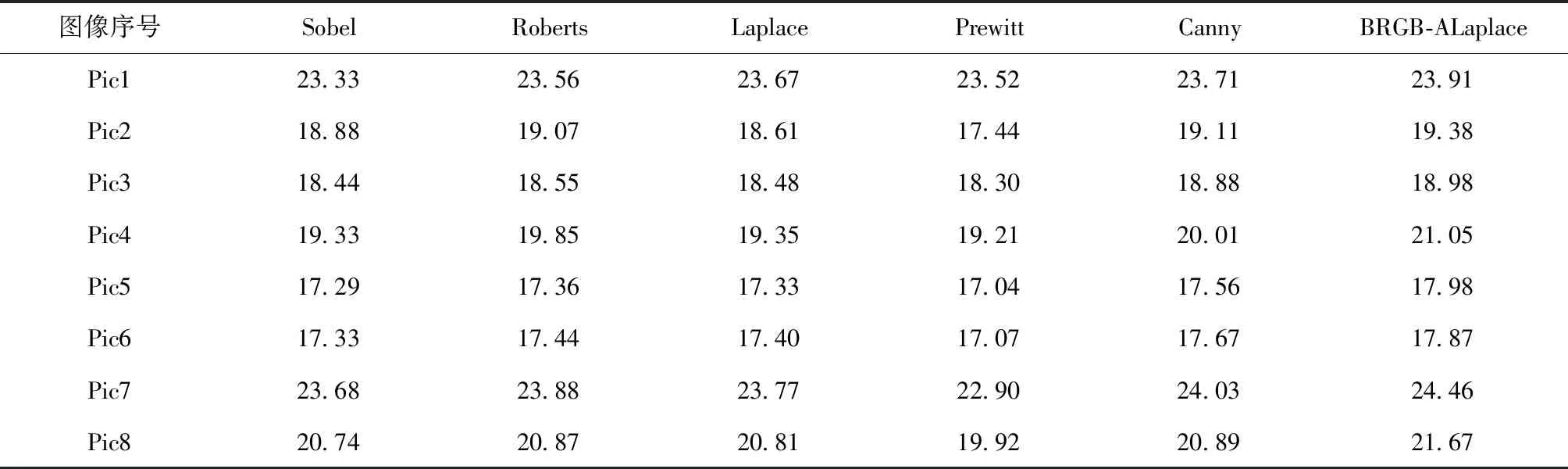
表3 文中邊緣檢測算法PSNR值匯總表

表4 文中邊緣檢測算法MSE值匯總表
算法運算時間與前文提及內容作比較見圖6。圖7、8為文中邊緣檢測算法PSNR值和MSE值的比較圖,由上述兩圖可明顯看出,改進算法所得到的BRGB-ALaplace算法具有高PSNR值和低MSE值,經過BRGB-ALaplace算法處理后的圖像質量較其他幾種算法處理后的圖像質量高,且其原圖像和處理后圖像之間的均方誤差較其他幾種算法的MSE小,進一步反映了改進算法所得到的BRGB-ALaplace算法優越性。

圖6 邊緣檢測算法運算時間比較圖

圖7 邊緣檢測算法PSNR值比較圖
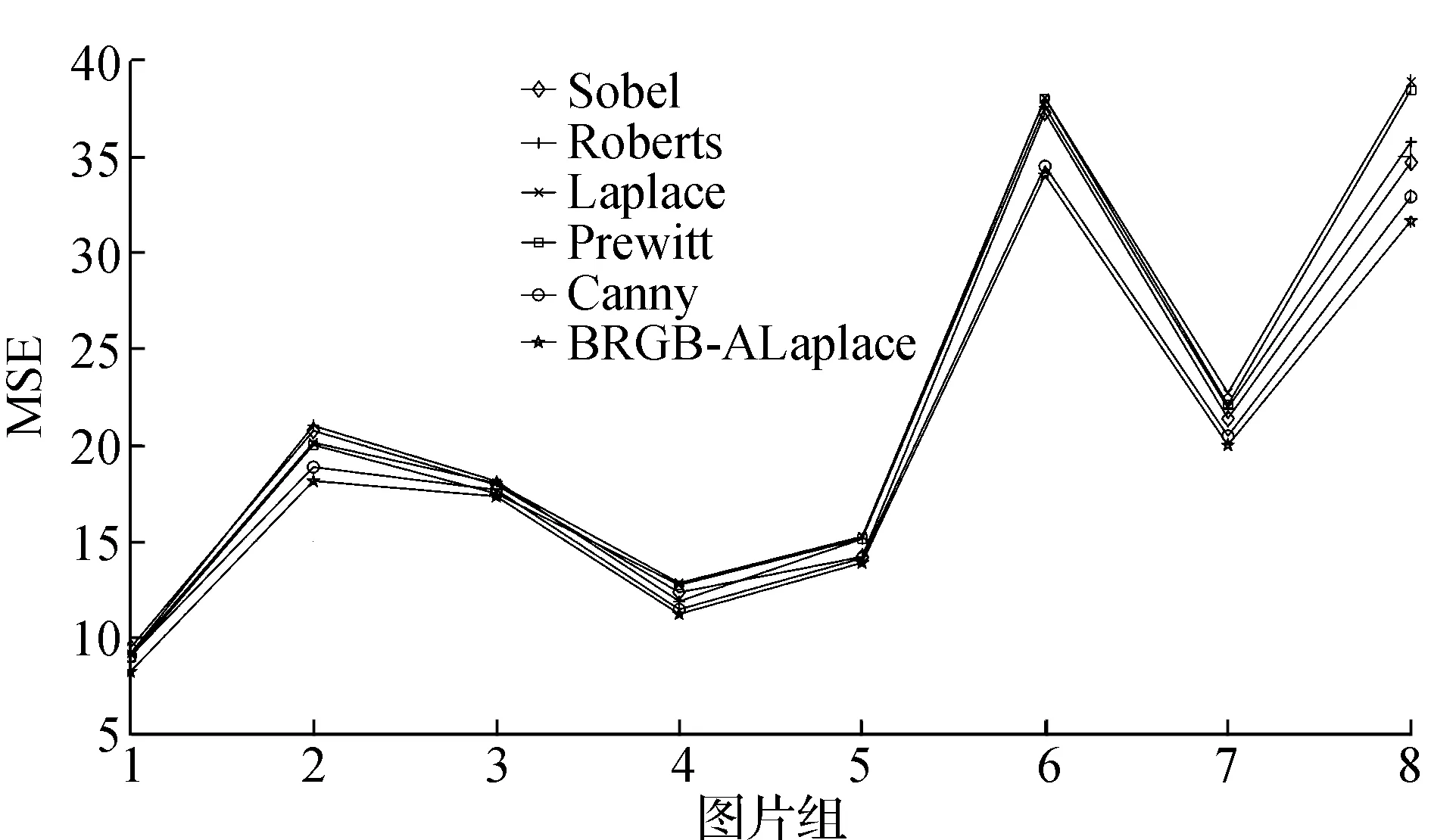
圖8 邊緣檢測算法MSE值比較圖
4 結束語
本文從圖像邊緣檢測這一角度出發,首先對原始影像進行預處理,進行高斯濾波器處理,然后用BRGB-ALaplace算法進行邊緣檢測,從而檢測出相應邊緣。改進算法所得到的BRGB-ALaplace算法與常規梯度算子相比,取得了令人滿意的檢測效果:首先,算法經過PSNR值和MSE值兩個定量評估,明顯定位較為精準,檢測邊緣定位準確,具有良好的邊緣相應性能,處理之后的質量也較為理想;其次,算法在引入人為噪聲進行實驗,表明改進算法所得到的BRGB-ALaplace算法具有良好的魯棒性;最后對實驗結果進行目視評價分析后還發現,BRGB-ALaplace算法還存在少量紋理信息,借助這些紋理信息幫助識別模糊邊緣,以減少人為干預產生的邊界判別錯誤。本文改進得到的BRGB-ALaplace算法可有效解決因圖像灰度發生急劇變化而導致的“閾值檢測不敏感”現象,通過RGB三相分解Laplace變換,可有效提升其邊緣檢測靈敏度和定位精度性能,但因其算法基于經典Laplace算法基礎上經拆分重組而來,故在算法運算復雜度和時間表現上尚且有待改進。本文算法在部分區域可能存在將陰影錯分到所提取邊緣界限之中的現象,但因其檢測邊緣含有少量的紋理信息,可通過此類信息將陰影誤判剔除,從而減少陰影所導致的誤判對算法處理效果的影響,得到更好的邊緣檢測結果。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55