跟航模式下北極冰區船舶安全間距研究
2021-03-10 13:27:26李振福張浩軒劉依源代明鶴
中國航海 2021年3期
關鍵詞:船舶
李振福, 張浩軒, 劉依源, 代明鶴
(1. 大連海事大學交通運輸工程學院, 遼寧 大連 116026;2. 大連海事大學綜合交通運輸協同創新中心, 遼寧 大連 116026)
北極冰區的航行環境十分惡劣,特別是當船舶航行在重冰區海域時,需要破冰船通過破除航道中的浮冰來輔助船舶航行,船舶往往以船隊的形式跟航,且要充分把握船舶在冰區特殊環境下與前船的距離,做好惡劣環境下的風險評估。在實際的極地航行中,風險評判往往需要駕駛員憑借經驗進行分析與估計,這樣會增大船舶在行駛過程中的碰撞風險。北極冰區航行的船舶以單船或船隊的形式在破冰船后進行跟航,后船無法追越前船,這與城市道路交通中的單一車道相類似。道路交通中研究避免前后車輛碰撞的模型較多,其中最典型的就是利用跟馳理論進行分析。
跟馳理論最早應用在道路交通研究領域,是運用動力學方法探求車輛隊列在無法超車的單一車道上行駛時,后車跟隨前車的行駛狀態,研究相鄰兩車間的相互作用,并用數學模式加以分析闡明的一種理論。Reuschel和Pipes首先從運動學的角度對相互移位的中途車流進行動力學分析[1-2]。Gazis等進一步討論了各種非線性的交通流量跟蹤模型[3]。Gipps構造一種新的跟馳車輛響應新模型,用以體現交通流的真實情況[4]。曲大義等認為前導車和道路環境等因素會影響車輛跟馳行為,將車輛抽象成相互作用的分子,并基于分子動力學理論構建相互作用勢函數,建立出基于該函數的分子跟馳模型[5]。
不可否認,海上交通與城市道路交通存在不同。其一,相較于車輛來說,由于船舶龐大的結構,其操縱性和制動性均不及汽車,在海上航行所受到的影響因素也較多,如風、浪、水流、霧等,考慮的情況較為復雜。其二,除安全方面外,對于海上運輸來說,其更注重經濟性,考慮如何減少運營的成本來增加收益,對于陸上交通來說,更注重時間性,考慮如何將乘客快速地運送到目的地。而隨著海上交通的復雜化和密集化,越來越多的學者將跟馳理論應用到海上交通。朱俊等人運用了最優化理論和非線性跟馳理論,通過建立船頭間距與船舶速度之間的函數關系,從微觀角度構建出了航道通過能力的計算模型[6]。何良德等人根據船舶制動原理,分析船舶制動距離與船長、船速的相關性,給出了制動距離的經驗公式,構建關于內河船舶的跟馳間距模型[7]。而由于北極冰區環境的特殊性,船舶需要在破冰船的護航操作下進行跟隨航行。船舶進入冰區后,需跟隨在破冰船的后方,在其開辟的尾跡中航行。為了保證船舶可以在北極覆冰水域安全航行,張明陽等人提出了護航船與被護航船之間安全距離和碰撞風險的計算模型[8]。李振福等人在冰上絲綢之路的背景下研究了北極航線船舶安全通航問題,基于陸上交通流跟馳模型,建立了適用于北極航線的船舶跟馳模型[9]。
由于在船舶航行安全方面,關于北極冰區航行的船舶安全間距研究較少,故為了拓展北極冰區航行安全方面的研究,本文通過對船舶在冰區航行受到的阻力和船舶制動距離的分析,并結合“永盛輪”在冰區的實際航行情況,將計算出的船舶安全間距與實際數據進行對比分析,從而驗證計算結果的合理性,可以為其它船舶在北極冰區的安全航行提供一定的參考。
1 北極冰區船舶安全間距
北極冰區一般可分成浮冰區和陸緣冰區兩種情況。傳統破冰船都會采用連續破冰和沖撞破冰兩種方式。連續式破冰適用于冰面強度小、厚度薄的海域。如果冰層較厚,超過了破冰船設計時的最大破冰厚度或者在較為復雜的堆積冰、厚冰區及更嚴峻的冰脊區等冰區中時,則采用沖撞破冰法。本文針對浮冰區來進行研究,并選擇對連續式破冰方法下的船舶安全間距進行計算。因北極冰區環境的特殊性,為確保船舶跟航時的航行安全,本文結合停船視距理論[10],計算出跟航模式下的北極冰區船舶安全間距。
當船舶進入冰區時,需要借助破冰船輔助破冰才能繼續航行。在冰情較為嚴重的情況下,船舶需緊緊跟隨破冰船,在其開辟的尾跡中航行,否則通道很快會被大量碎冰堵塞而使后船無法安全航行。而在冰區緊跟破冰船行駛時,兩船距離較近,雖然船舶航速較低,但仍存在很大的船舶碰撞危險。其中最為危險的情況就是當破冰船出現“撞墻式”停船(假設船舶即刻停下,無制動距離)時,后船需通過及時制動讓船舶停下,以此來避免與前船發生碰撞。
在航行過程中,一般可通過兩種制動方式讓船舶停下。一種方式為正常制動,也稱停船制動,船舶完全依靠航行阻力來降低航速。另一種方式為倒車制動,也稱為緊急制動,當船舶遇到緊迫危險需要緊急停船時,就要采取倒車的方式使其快速停下。倒車沖程也稱緊急停船距離或最短停船距離。本文將通過考慮兩種制動方式來確定船舶的制動距離。
1)正常制動
忽略螺旋槳阻力,船舶正常制動時,其運動微分方程[7,9,11-12]為:
(ms+mx)·a=R
(1)
(2)
mx=0.07ms
(3)
式中,ms、mx分別為船舶總質量和附加水質量,kg;a為船舶加速度,m/s2;R為船舶航行阻力,N。
2)倒車制動
忽略螺旋槳阻力,船舶倒車制動時,其運動微分方程[7,9]為:
(ms+mx)·a=-Tp-R
(4)
式中,Tp為船舶倒車拉力,N。
在冰區航行時,最危險的情況就是破冰船或前船由于特殊情況突然停船。所以在此種情況下,假設前船突然停船,船頭間距由船長L及停船視距S組成,船頭間距為后船船艉到前船船艉的距離。而停船視距S即為文中的船舶安全間距dsafe,由船舶安全余量Sm、反應距離Sr及后船制動距離Sb組成。故此時船頭間距和船舶安全間距為:
d=dsafe+L
(5)
dsafe=Sm+Sr+Sb
(6)
Sr=Vtr
(7)
其中,船舶安全余量Sm取0.25倍船長[10];后船駕駛員從發現前船的運行態勢并下達命令到主機開始制動的時間為tr(其中包括駕駛員的反應時間τ(0.5-1.5 s)及其動作時間(0.7-1.0 s),還有從下令到主機實際制動的時間θ(4-6 s))[7],平均可取tr為7 s;V為船舶航速,m/s。
2 冰區安全速度與船舶制動距離計算
2.1 冰區安全速度
本文選用了AIRSS (Arctic Ice Regime Shipping System)系統并結合北極冰區的海冰情況進行分析,通過其提供的數據對船舶在冰區的安全速度進行計算。AIRSS框架已經確定了多種類型冰的冰況,通過冰的厚度所歸類的冰乘數(Ice multipliers)數值,并根據相應的準則來對冰的類型進行分類。AIRSS所確定的六種冰的類型情況如下:灰冰(10~15 cm)、灰白冰(15~30 cm)、第1階段薄當年冰(30~50 cm)、第2階段薄當年冰(50~70 cm)、中等厚度當年冰(70~120 cm)、厚當年冰(大于120 cm)。冰乘數IM基于冰的類型與船舶相應的類別,數值為非零整數,范圍為-4到2之間,數值越大,對應的風險越低[8]。冰乘數數據如下表1所示。
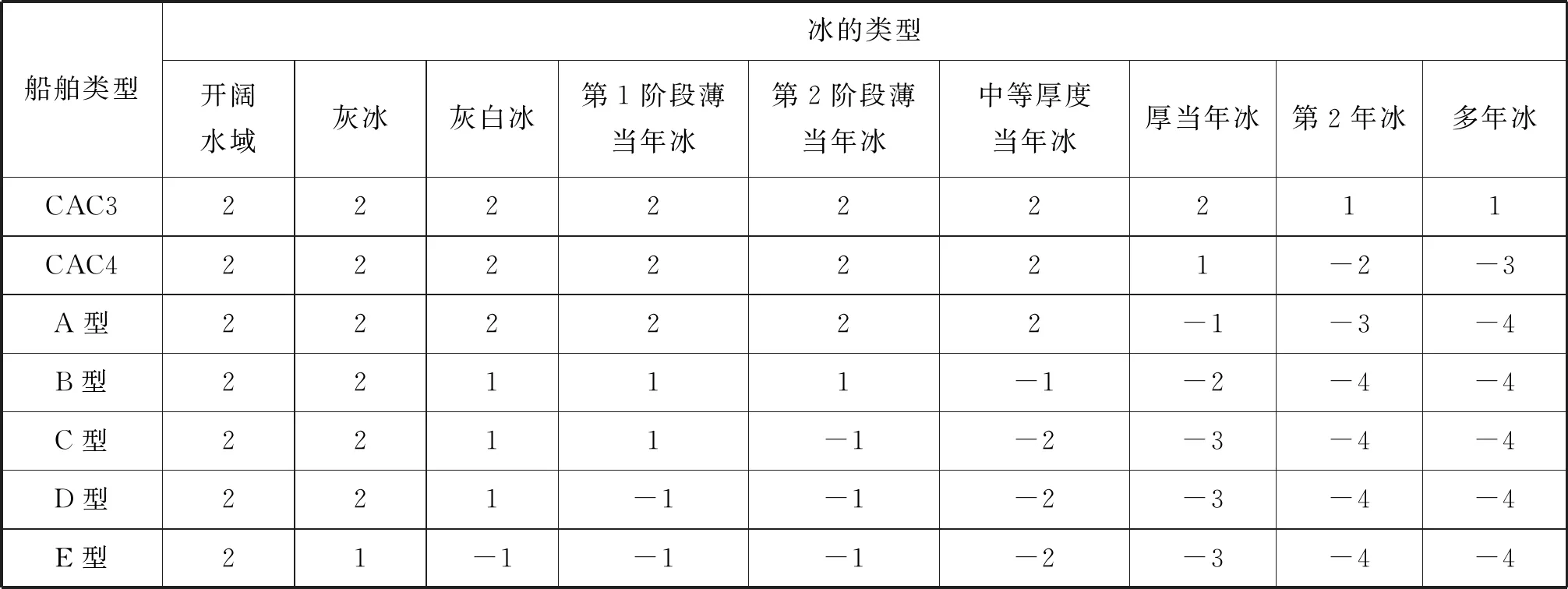
表1 北極區域冰乘數
船舶在覆冰水域航行時,需要盡量小于這個最大安全速度來行駛,不能過快,以保證船舶安全。在模擬情況下,安全速度也由AIRSS引導,而在實際應用中,船舶類型和結冰條件是影響安全速度的主要因素。根據AIRSS的標準,船在覆冰水域中安全航行的能力由IN(Ice Numeral)來表示[8]:
IN=Ca·IMa+Cb·IMb+…+Cn·IMn
(8)
其中,Ca是a類海冰的海冰密集度;IMa是針對某一船舶在a類海冰的冰乘數,以此類推。根據海冰數值計算船舶在特定冰況環境下的安全速度,計算公式為[8]:
V=0.002 7·(IN)3+0.039 8·(IN)2+0.248 9·(IN)+3.838 5
(9)
其中,V指船舶在不同冰況下的安全速度,m/s。
2.2 船舶航行阻力
1)風荷載
作用于船舶上的風荷載可參照《JTS144-1—2010港口工程荷載規范》[13]計算,作用在船舶上的風壓力為:

(10)
式中:F風為船舶風荷載,N;Aw為船體水面以上縱向受風面積,m2;V風為風速,m/s;ζ1為風壓不均勻折減系數;ζ2為風壓高度變化修正系數。
水面以上受風面積主要由船舶外形尺度及甲板上的貨物、駕駛室因素等決定,一般難以準確計算。我國現行水運行業規范采用日本學者高橋宏直于1998年的成果,該成果基于船舶資料繪制出了載重量(DWT)或總噸(GT)與受風面積的統計曲線并進行回歸分析,通過擬合形成計算受風面積的回歸曲線,故文中采用其對數回歸表達公式[14]:
lgY=α+βlgX
(11)
式中,Y為船舶水面以上的受風面積;X為船舶載重量(DWT)或總噸(GT);α與β為回歸系數。受風面積與載重量或總噸的關系見表2。
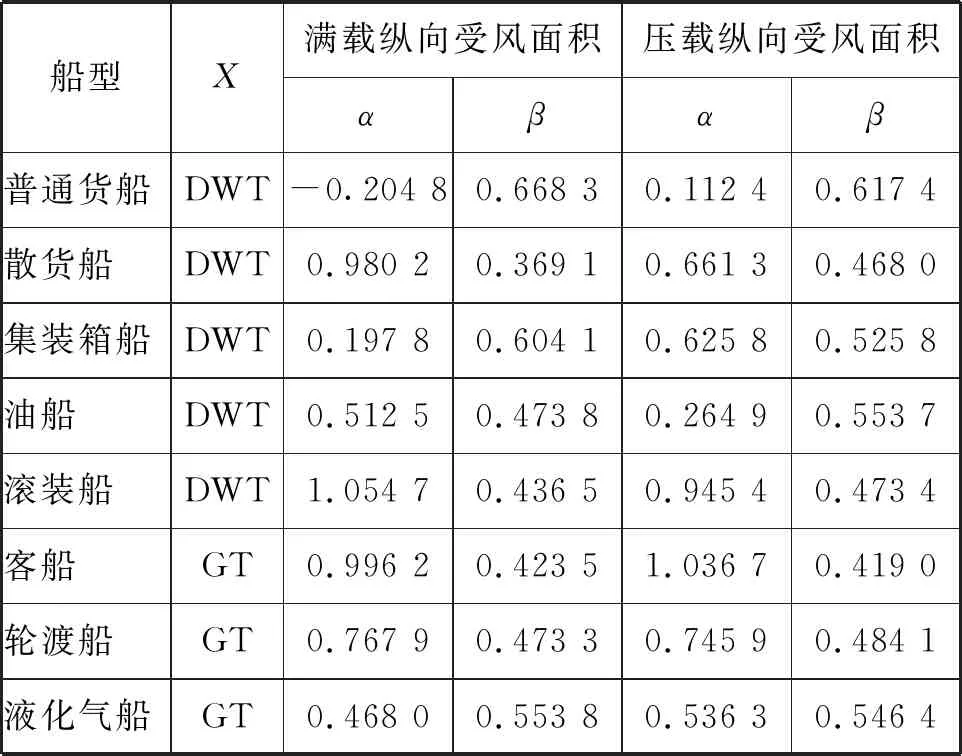
表2 各船舶參數所對應的回歸系數α與β
2)水流阻力
水流阻力參照《港口工程荷載規范》計算,其表達式為[10,13,15]:
F水=kV2
(12)

Cb·L·B)
(13)
(14)
(15)
式中:F水為水流阻力,N;V為船舶航速,m/s;k為水流阻力系數;ρ是海水密度,kg/m3;Re是水流對船舶作用的雷諾系數;b是系數;L是船舶長度,m;D是船舶吃水,m;B是船舶寬度,m;Cb是船舶方形系數;V水為水流速度,m/s;η是海水的粘性系數;V排水為船舶排水體積,m3。
3)碎冰阻力
Colbourne認為碎冰阻力與速度有平方的關系,且碎冰阻力和碎冰密集度有n次冪的關系,針對不同船型,n的取值不同[16]。最終發現,n=2時最符合冰區船舶行駛在碎冰區域的實際情況,結果誤差也最小,因此本文n取2。碎冰阻力的估算公式為[17]:
F冰=CPρiBhiV2C2
(16)
(17)
(18)
其中,Rp為碎冰阻力,N;V為船舶速度,m/s;Frp為冰傅汝德數;ρi為冰的密度,文中取890kg/m3;g為重力加速度,取10m/s2;B為船舶寬度,m;hi為海冰厚度,m;C為海冰密集度。
2.3 船舶制動距離
船舶在北極航道航行時所受到的阻力大小并非是不變的,而是會隨著航速的變化而改變。船舶在制動過程中作變減速運動,所求加速度隨速度的減小而變化。故結合式(1)~(4)以及式(10)~(18),根據船舶正常制動和倒車制動兩種情況,可分別得到船舶制動加速度的表達式:

(19)

(20)
式中,a正為船舶正常制動時的加速度,m/s2;a倒為船舶倒車制動時的加速度,m/s2;Tp是船舶倒車拉力,N;F風是風阻力,N;F水是水流阻力,N;F冰是碎冰阻力,N。
在計算船舶倒車拉力時,不能簡單地用主機功率來計算倒車拉力,因為船舶進行倒車時主機功率并不能完全發揮,一般存在一個推進系數,具體如下[18]:
(21)
式中,P.C為推進系數;Pe為有效功率;Ps為船舶主機功率。船舶的推進系數一般為0.5~0.7,文中取0.5。大多數船舶主機為柴油機,柴油機有效倒車功率與有效正車功率存在確定的比值,一般取85%。故船舶在倒車制動時的倒車拉力Tp為:
(22)

(23)
將公式(19)和(20)帶入式(23)中可得
① 正常制動時的船舶制動距離:
(24)
② 倒車制動時的船舶制動距離:
(25)
3 實證分析
本文根據船舶實際航行情況進行實證分析,選擇“永盛輪”2013年8月28日至9月2日的航程作為研究對象。
3.1 實際航行情況
“永盛”輪為多用途普通干貨船,主機額定功率為7 860 kW,設計航速為14 kn,型長、型寬、型深分別為160 m、23.7 m、11.95 m,船舶類型為A類。該航次船舶吃水8.6 m,船舶載重噸(DWT)為19 561 t,排水量為26 216 t。“永盛”輪在東西伯利亞海、維利基茨基海峽和喀拉海遭遇浮冰影響,其余海域均無冰,船舶在冰區航行的大致情況如下:
(1) 2013年8月28日,“永盛”輪在穿過白令海峽駛過楚科奇海后航行至德朗海峽,破冰船“50 LET POBEDY”即“50年勝利號”從70°00.6′N/176°22.6′E處開始護航。
(2) 8月28日至30日通過東西伯利亞海,氣壓為1 012~1 023 hPa,西北風3級,水流流速為0.9 kn,流向為南;8月30日進入低壓區,風轉為西南風3級,水流流速為0.3 kn,水流流向為西南。
(3) 8月28日,在東西伯利亞海(70°29.9′N/171°05.7′E至71°51.2′N/168°00.9′E)第一次進入冰區,分布著密集度40%的灰冰(Grey Ice,冰層厚度10~15 cm)和10%的灰白冰(Grey-White Ice,冰層厚度15~30 cm)。
(4) 8月30日,第二次進入冰區依舊在東西伯利亞海(72°08.7′N/161°49.1′E至73°37.4′N/156°47.4′E),分布著密集度30%的灰冰(冰層厚度10~15 cm)和30%的灰白冰(冰層厚度15~30 cm)。
(5) 9月1日,在維利基茨基海峽西側與喀拉海相連處(77°37.7′N/108′47.5′E至77°34.2′N/94°05.2′E)第三次進入冰區,分布著密集度40%的中等厚度當年冰(First-Year Medium Ice,冰層厚度70~120 cm)和50%的第二階段薄當年冰(Thin First-Year Ice Second Stage,冰層厚度50~70 cm),該區域多為西北風,風力3級左右,水流流速約為1.3 kn,水流流向為南。
(6) 9月2日,破冰船在喀拉海域于77°28.3′N/088°40.6′E處結束護航。
3.2 結果分析
根據“永盛輪”船舶參數與其實際的冰區航行情況,結合上述公式,對船舶制動情況進行對比分析,如圖1和圖2所示。并將各冰區航行的船頭間距和船舶安全間距與實際航行中“永盛輪”和破冰船“50 LET POBEDY”的最近距離進行匯總,如表3所示。具體內容如下:
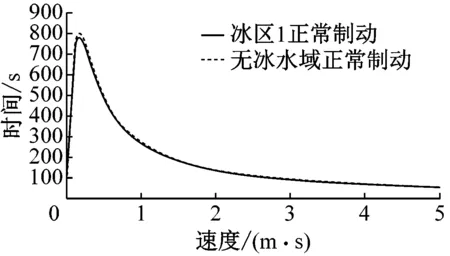
(a)冰區1與無冰水域
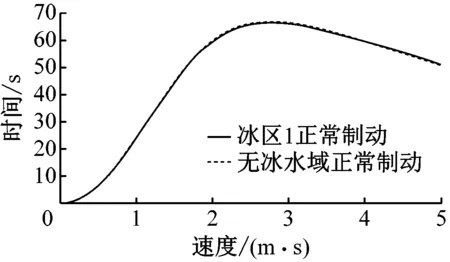
(a)冰區1與無冰水域

表3 船舶安全間距與實際航行距離
根據“永盛輪”實際航行情況可知,冰區3的冰情最為嚴重。由圖1和圖2可知,無論船舶采取正常制動還是倒車制動,在冰區1和冰區2與無冰水域的制動情況幾乎相同,說明在冰情不嚴重的情況下,海冰對船舶制動過程產生的影響并不大,而由于冰區3的冰情較為嚴重,船舶在冰區的制動距離明顯小于無冰水域的制動距離,船舶制動情況相差較大。
如表3所示,隨著冰情嚴重程度的增加,前后船之間的船舶安全間距都呈減小的趨勢。根據“永盛輪”實際航行情況,得出的經驗是在稀疏冰區航行船舶安全間距保持4鏈左右[19],約740m,且“永盛輪”實際航行最近距離均在兩種制動情況下的安全間距范圍內,本文計算結果具有一定的合理性。在冰區3中,實際最近距離與船舶倒車制動下的安全間距相接近,這說明如果破冰船遇到緊急情況突然停船,后船則必須采取倒車制動的措施才能使得兩船不相撞。在實際航行中,破冰船一般都具有較好的操縱性,能在很短的時間內將自身的速度提升到14節左右。所以一般情況下,跟航模式下的船舶避碰主要從后船及時停船制動和破冰船及時提速兩個方面來實施,這樣可以降低操作難度,提升安全性。本文考慮了前船可能會發生最為緊急的狀況,所以后船在冰區中可根據實際航行情況適當地縮短正常制動下的船舶安全間距。當只有發生非常緊急的情況時,后船才需要使用倒車制動。
4 結論
本文結合北極冰區的航行環境,計算出跟航模式下北極冰區的船舶安全間距,并通過“永盛輪”的實際航行情況進行了分析和驗證,得出以下結論:
1)在冰情不嚴重的情況下,船舶在冰區和無冰水域的制動情況基本一樣,而在冰情較為嚴重時,海冰對船舶的航行影響較大,冰區和無冰水域的船舶制動情況有明顯差異。
2)除船舶自身影響因素外,不同冰區的海冰分布情況也影響著后船與破冰船的船舶安全間距,冰情越嚴重,船舶安全間距越小。
3)在冰情嚴重的情況下,后船需要以較近的距離跟隨破冰船航行。若破冰船發生緊急情況突然停船,后船必須采取倒車制動才能使兩船不相撞。但在實際航行中,破冰船可以短時間內提速,加大與后船的距離,故前后船避碰主要從后船及時制動和破冰船及時提速兩方面來實施,此時后船一般不需要進行倒車制動。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30