基于MATLAB的六足機(jī)器人運(yùn)動(dòng)學(xué)分析仿真
2021-03-12 08:28:38劉園園
南方農(nóng)機(jī) 2021年5期
劉園園
(長(zhǎng)安大學(xué)工程機(jī)械學(xué)院,陜西 西安 710064)
0 前言
隨著科技的發(fā)展,機(jī)器人已逐漸成為學(xué)者研究的熱點(diǎn),而六足機(jī)器人作為典型的并聯(lián)結(jié)構(gòu)機(jī)器人,運(yùn)動(dòng)方式多變,適合復(fù)雜的地面環(huán)境,以其優(yōu)越的越障能力在諸多機(jī)器人中脫穎而出,已成為近年來的研究熱點(diǎn)。本文對(duì)六足機(jī)器人的運(yùn)動(dòng)學(xué)進(jìn)行了研究計(jì)算,并在Simulink中進(jìn)行了仿真分析[1]。
1 正運(yùn)動(dòng)學(xué)求解
文獻(xiàn)[2]詳細(xì)介紹了旋量理論,本文通過旋量理論搭建如圖1所示的單腿模型,并作為初始位置,其關(guān)節(jié)軸線上點(diǎn)rn(n=1,2,3)坐標(biāo)相對(duì)于基坐標(biāo)系位置關(guān)系如圖1所示,其中L1=45mm,L2=75mm,L3=135mm。
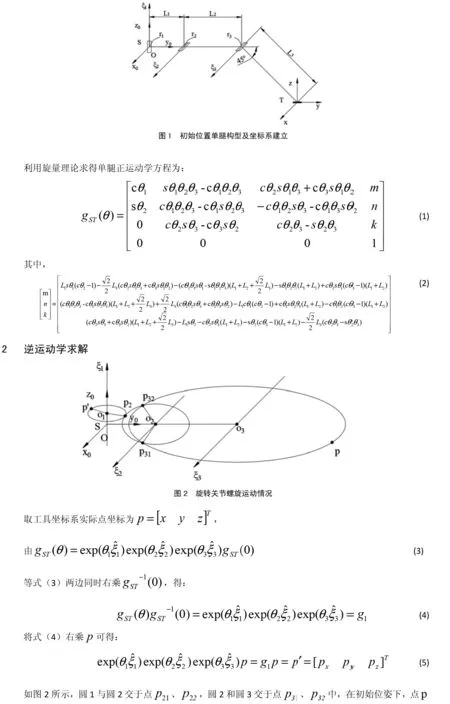
圖1 初始位置單腿構(gòu)型及坐標(biāo)系建立
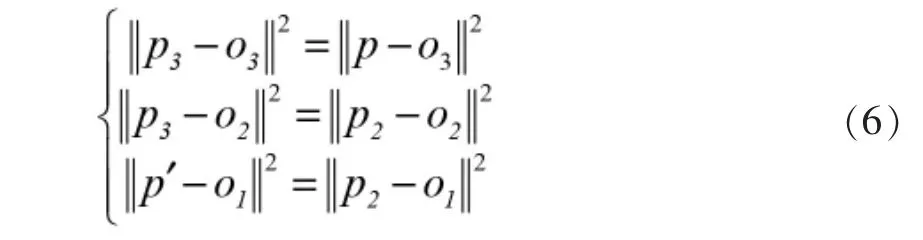
利用旋量理論求得單腿正運(yùn)動(dòng)學(xué)方程為:
其中,

2 逆運(yùn)動(dòng)學(xué)求解

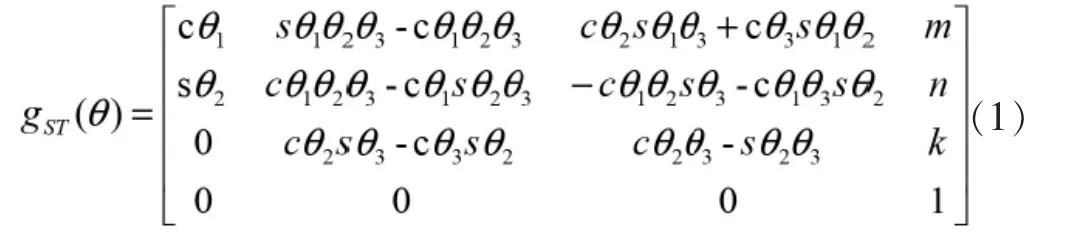
圖2 旋轉(zhuǎn)關(guān)節(jié)螺旋運(yùn)動(dòng)情況

將式(4)右乘可得:

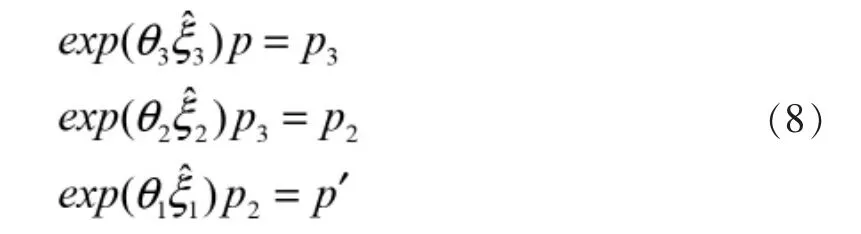
如圖2所示,圓1與圓2交于點(diǎn)p21、p22,圓2和圓3交于點(diǎn)p31、p32中,在初始位姿下,點(diǎn)p通過軸線ζ3旋轉(zhuǎn)θ3到點(diǎn)p3,之后通過軸線ζ2旋轉(zhuǎn)θ2到達(dá)點(diǎn)p2,最后通過軸線ζ1旋轉(zhuǎn)θ1到點(diǎn)p'。因此,需要計(jì)算出各個(gè)交點(diǎn)坐標(biāo),由圖2可知:
其中:y2、p2x和p3x是未知參數(shù),y3=L1+L2,y2=L1根據(jù)幾何關(guān)系可建立方程:
至此,交點(diǎn)p2、p3已經(jīng)求出,所以3個(gè)旋轉(zhuǎn)關(guān)節(jié)螺旋運(yùn)動(dòng)可表示為:
分別利用Paden-Kahan子問題1可求得前3個(gè)關(guān)節(jié)角度為:

3 基于MATLAB/Simulink的運(yùn)動(dòng)學(xué)仿真
如圖3所示,將CATIA搭建的六足機(jī)器人三維模型導(dǎo)入到Simulink中,然后根據(jù)運(yùn)動(dòng)學(xué)分析結(jié)果計(jì)算出六足機(jī)器人的運(yùn)動(dòng)空間,并進(jìn)行步態(tài)規(guī)劃獲得步態(tài)信號(hào),并將其添加至仿真中,最后在仿真環(huán)境中添加地面信息,其最終的Simulink仿真圖如圖4所示,由最終的動(dòng)態(tài)仿真結(jié)果觀察可得六足機(jī)器人可以在平坦地面正常運(yùn)動(dòng)行走,驗(yàn)證了運(yùn)動(dòng)分析的正確性。
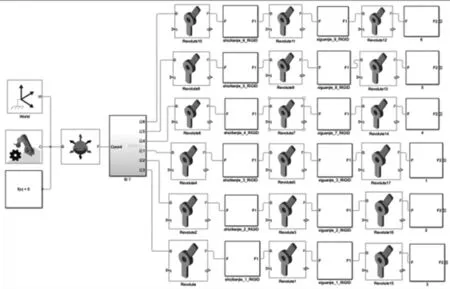
圖3 六足機(jī)器人本體Simulink仿真圖
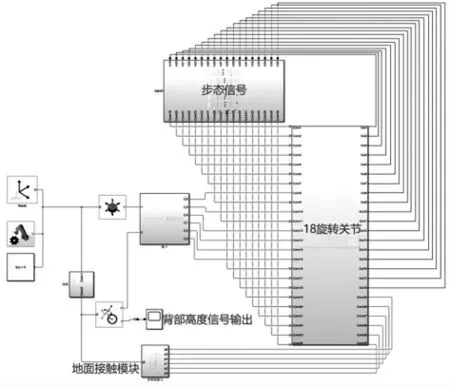
圖4 最終仿真環(huán)境搭建
4 結(jié)論
本文依據(jù)旋量理論對(duì)六足機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析,搭建正逆運(yùn)動(dòng)學(xué)模型,并于MATLAB/Simulink仿真環(huán)境中驗(yàn)證了運(yùn)動(dòng)分析的正確性,為后續(xù)六足機(jī)器人運(yùn)動(dòng)平穩(wěn)性的研究奠定了良好的基礎(chǔ)[3-4]。
猜你喜歡
當(dāng)代陜西(2022年5期)2022-04-19 12:10:18
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
汕頭大學(xué)學(xué)報(bào)(自然科學(xué)版)(2020年4期)2020-12-14 07:05:00
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
學(xué)習(xí)月刊(2015年21期)2015-07-11 01:51:44
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
