輸電線路巡檢無人機電磁場避障與路徑規劃
2021-03-13 09:12:56董靈鵬湯培良曹浩楠鄒國平楊仕友
浙江電力 2021年2期
董靈鵬,丁 建,湯培良,曹浩楠,鄒國平,楊仕友
(1.浙江大學 電氣工程學院,杭州 310027;2.國網浙江省電力有限公司檢修分公司,杭州 311232;3.杭州格創新能源有限公司,杭州 310019)
0 引言
近年來,隨著我國經濟的持續快速發展,電網的規模和輸送能力日益壯大。以浙江為例,2010—2020 年浙江省電力有限公司110~1 000 kV架空輸電線路從28 903 km 增長到超過50 000 km,整體增長超過1.7 倍。但相應的輸電線路運檢人員的數量并沒有成比例增長,且高壓線路走廊經常跨越通信盲區、交通死區和無人區,線路的運維和故障排查異常困難,因此傳統的人工巡線方式難以滿足要求[1-2]。而無人機線路巡檢具有精度高、視角寬廣、安全性好和不受地形環境限制等諸多優點,在國內外電力行業得到了廣泛應用[3-5]。
考慮到圖像的清晰度與飛行的安全性,一般要求無人機與輸電線的距離控制在10~30 m[6-7]。某電力科學研究院已開展基于無人機平臺的多傳感器集成巡檢系統研究,并取得了階段性成果[8-9],但輸電線路的精確距離控制還是一個難題。激光雷達測距技術從2005 年開始逐漸應用到輸電線路勘測設計中,但其不能直觀地表示障礙物,且不適用于移動測量[10-13]。三維空間掃描可以準確地給出障礙物與輸電線路的相對距離,但掃描系統價格昂貴,動輒數百萬美元,且儀器的質量、體積和功率均較大,不宜搭載在無人機上[14-15]。紅外檢測技術具有非接觸性、安全可靠、檢測速度快、判斷準確和操作方便等優點,但其后續的數據處理比較繁瑣。超聲波測距傳感器的原理是利用聲波的扇形發射特性,可采用無人機搭載超聲波測距傳感器的方式實現無人機與輸電線的凈空距離測量,但由于超聲波傳感器測距范圍有限(一般不超過10 m),難以滿足無人機和輸電線路對安全距離的要求[16-17]。
為此,本文通過對500 kV 輸電線路進行建模仿真分析,研究其電場大小和分布狀況,提出了一種直接利用電場有效值與高度來確定無人機安全飛行距離的方法,并進行了現場測試。該法可作為無人機巡檢距離控制的有效手段。
1 輸電線路電場仿真分析
線路模型選取500 kV 北侖電廠—市北線同塔雙回輸變電通道線路。其中直線塔選用典型的546DC-SJS1 塔,呼高33 m,導線為正向序排列。導線采用4×JL/LG-630/45 鋼芯鋁絞線,總截面積674 mm2,導線外徑33.8 mm,直流電阻0.045 9 Ω/km,分裂股數為四分裂;地線采用JLB35-120鋁包鋼絞線,總截面積121.21 mm2,外徑14.250 mm,導線直流電阻0.412 1 Ω/km。
根據上述結構,在Maxwell 中建立500 kV 輸電線路直線塔模型,建模時導線簡化設置成鋁導線,忽略絕緣子、金具,并在導線上施加500 kV的電壓激勵[16-18]。
為了驗證二維模型的準確性,采用Maxwell分別建立500 kV 高壓線路的二維與三維模型進行對比。
1.1 高壓輸電線路二維與三維電場對比計算
1.1.1 輸電線路三維電場計算
選取500 kV 輸電線路建模,考慮到仿真軟件的計算能力,基于實際模型對桿塔和周邊環境做簡化處理。輸電線路每段500 m,取2 段線路進行建模,如圖1 所示。
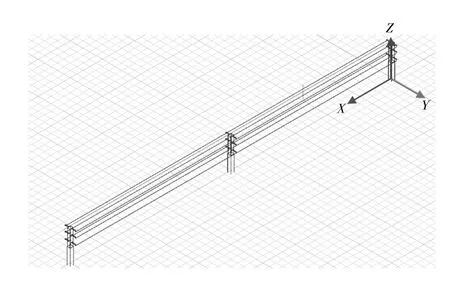
圖1 500 kV 高壓輸電線路3D 仿真模型
由于每一時刻下得到的電場強度為瞬時值,在電場求解時,可按A 相初始相角為0°施加電壓載荷,求解器設置為靜態電場。計算得到高度H=50.9 m、水平距離線路中心Y=20 m 處的電場值如圖2 所示。
由于計算機剖分能力有限,計算得出的電場會有一些波動。由圖2 可明顯看出鐵塔對空間電場分布影響顯著(在鐵塔附近由于鐵塔的屏蔽作用,電場值會出現大幅下降)。本文主要對無人機沿線飛行區域的避障進行研究,故忽略鐵塔附近50 m 范圍內的電場,進行平滑處理后可以得出在該位置處平均電場強度E1=16.3 kV/m。
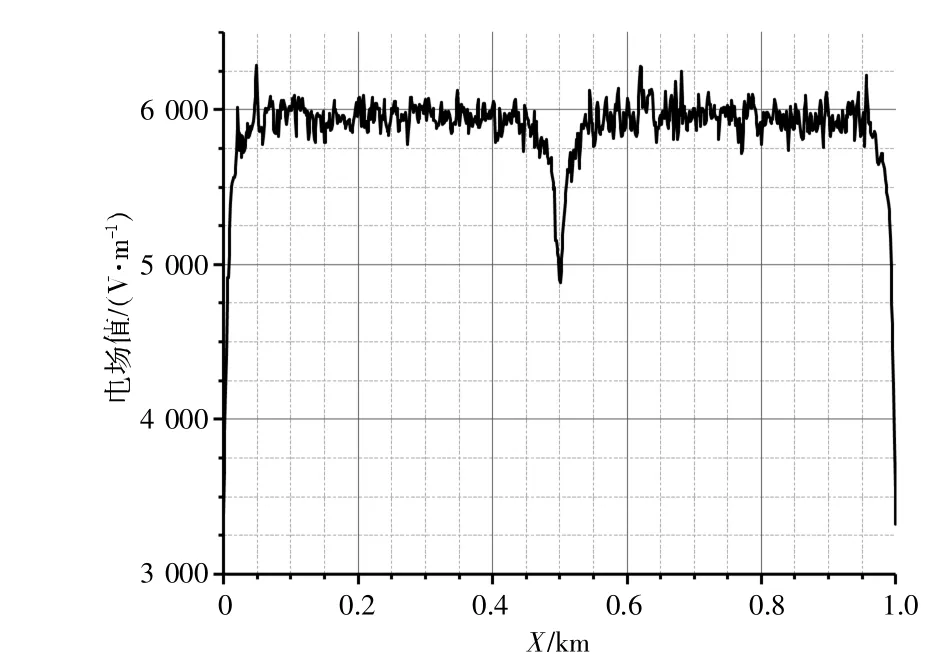
圖2 500 kV 線路在Y=20 m,H=50.9 m 處電場值
1.1.2 輸電線路二維電場計算
取輸電導線三維模型的X,Y 坐標建立二維模型,施加與3D 相同的電壓激勵,由此可以計算Y=20 m、H=60 m 處的電場值E2=16.5 kV/m。
對比輸電導線三維和二維模型下的電場數值知,兩者相對誤差在3%以下,完全符合工程要求。因此,針對輸電線路周邊電場,可以假設輸電導線沿Z 方向無限長,建立二維模型進行仿真。
1.2 輸電線路電場分析
根據二維電磁場模型可以得到如圖3 所示輸電線路電場分布。
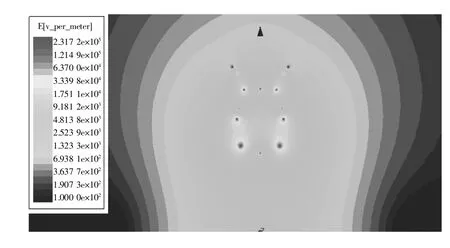
圖3 500 kV 高壓輸電線路電場
由圖3 可知:輸電線路周邊的電場值在導線周圍最高,并隨著距離的增加逐漸降低,在較近的距離范圍內等電場線是圍繞輸電導線的封閉曲線;在距離導線水平距離10 m 處的電場值在20 kV/m 左右;加大水平距離至20 m 后,電場值迅速下降至9 kV/m。因此理論上可以將輸電線周圍的電場有效值作為變量用以控制無人機的安全飛行距離。
1.3 輸電線路安全距離確定
無人巡視規范要求小型旋翼無人機與輸電線的距離大于10 m,因此計算中可以先確定一個距離所有輸電導線10 m 的包絡線,并取包絡線上最小電場有效值E0作為保護閾值,以此閾值作為電場限值,形成無人機飛行控制區域。
若要精確判定無人機與輸電線路的距離,則需要引入高度變量。圖4 所示為同一高度H 下電場隨水平距離的分布。電場強度最大值在輸電導線附近,隨著距離增加電場強度單調下降。因此,可以采用高度與電場強度相結合的方法,即分別測量高度與電場值,采用插值算法實現對無人機安全飛行距離的精確控制。在500 kV 特高壓線路中,每相輸電導線的高度相差較大,在相同水平位置,不同高度下電場值變化較大,故引入高度變量就顯得尤為重要。
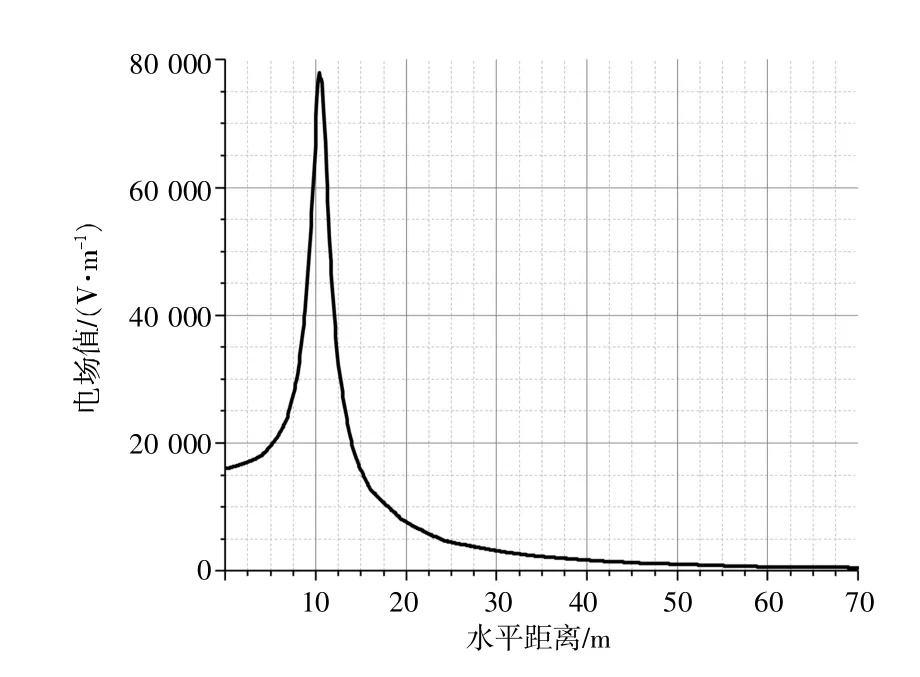
圖4 高度H=50 m 電場隨水平距離分布
在無人機飛行過程中,對計算的實時性要求比較高,而高度與電場值的測距方法存在一定的延時。那么在精度要求低的工況下,可以直接設置安全電場閾值E0。在500 kV 特高壓線路中,E0=2 000 V/m 時的無人機安全控制區域如圖5 所示。圖5 中安全控制區域離輸電線水平距離最遠為18 m、最近距離為10 m,即可較好地保證無人機的安全。
2 電場檢測硬件設備與路徑規劃
無人機距離控制系統包括電場探測系統、信息處理和避障的路徑規劃3 個部分。其中電場探測系統是無人機感知和探測外部環境信息的主要途徑,也是決定避障系統能否實現避障的基礎[19]。
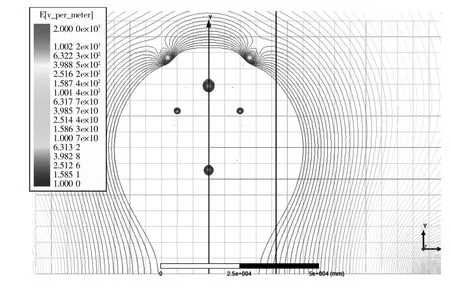
圖5 500 kV 線路中閾值2 000 V/m 等值電場
2.1 電場檢測硬件設備
電場探測系統由電場傳感器組成,電場傳感器的選擇為后期數據處理提供了穩定可靠的硬件基礎,直接關系到無人機能否正確、快速地感知到電場信息。該系統主要采用UAV-LF-04 型號的電磁場傳感器,具體參數如表1 所示。實物如圖6 所示。
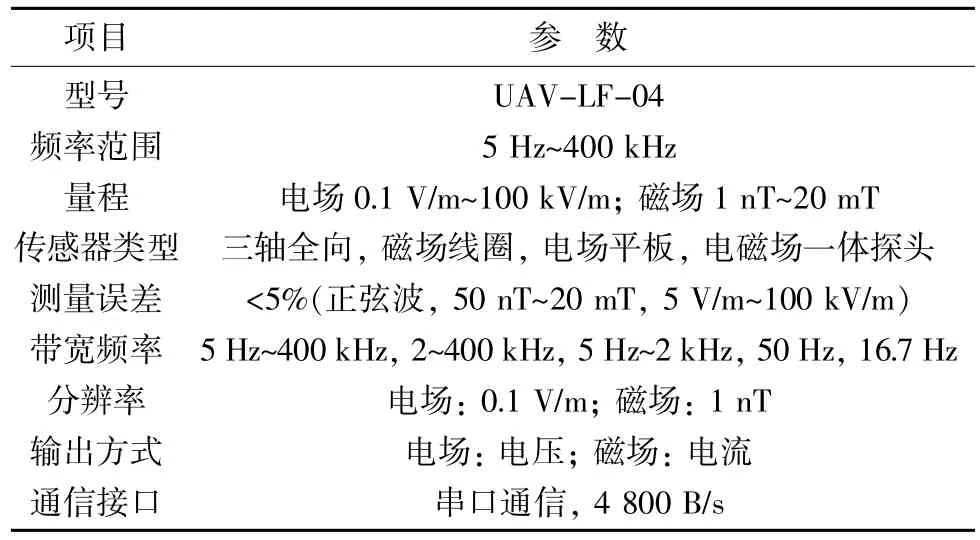
表1 電磁場傳感器參數表

圖6 UAV-LF-04 電場傳感器
2.2 避障與路徑規劃
避障與路徑規劃主要包含兩方面內容:一是判斷無人機當前的飛行位置是否處于危險區域;二是處于危險區域的無人機如何規劃路徑來躲避障礙。具體飛行流程:首先,判斷自身當前航點是否安全,若傳感器電場值低于初始設定的閾值,則設置飛行模式為正常飛行模式,并且給出后續飛行的期望航點;若傳感器檢測電場值高于閾值,則判斷當前航點為危險航點,將飛行模式更改為避障模式。其次處于避障模式下無人機將先抬升1 m,并再次判斷電場值,若大于閾值則自動返回上一航點并沿原路返航至起始點;若小于閾值,則繼續飛行到下一航點。避障策略的邏輯控制流程如圖7 所示。
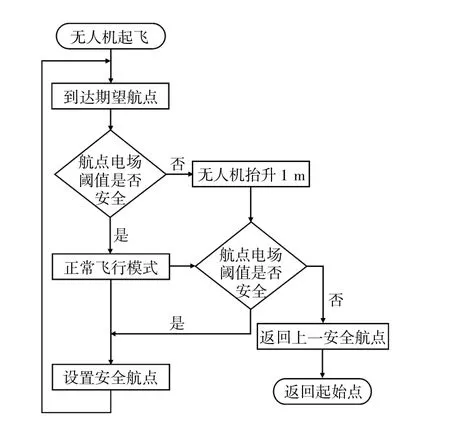
圖7 避障邏輯控制流程
3 現場測試與路徑規劃
3.1 電場值反演距離測試
基于無人機搭載的電場傳感器和自帶的高度測量儀可以獲取無人機所在位置電場值和高度,而固定高度下電場值在輸電線路外側是單調遞減的,因此可以據此判斷無人機與輸電線路的距離。表2 所示為不同位置處無人機的水平距離測量誤差。
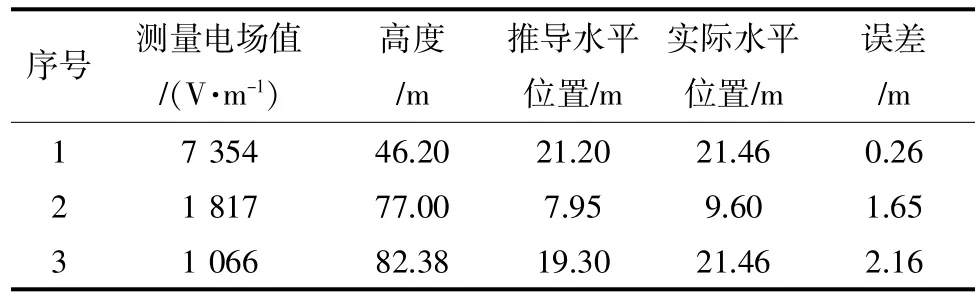
表2 電場反演無人機位置
結合測試結果和文獻資料,可以確定無人機高度測量儀和RTK(實時動態)定位系統的精度在厘米級別[20-23]。表2 給出了3 種具有代表性的測試點。第1 個點處于輸電線路中心外側21.46 m處,距離導線10 m 左右,剛好為無人機安全距離的臨界點,該位置的電場值較大,且對微小距離的變化比較敏感,故距離的相對誤差也是最小的。第2 個點相對于第1 個點高度上升了30 多m,其電場值也快速下降,由此反演出來的位置信息也相對來說偏離會大一些。第3 個點的高度是82.38 m,遠超輸電線路60 m 的高度,該高度下整體電場值都比較小且變化相對緩慢,所以測量誤差會比較大。但本文的研究區域是輸電線路附近,而該點已遠遠超出了安全距離范圍,故其誤差不影響避障能力。
3.2 利用安全閾值進行功能測試
測試前設定無人機的電場安全閾值E0=1 800 V/m,驗證其避障返航功能,飛行軌跡如圖8 所示,其中航點2—4 為鐵塔底座所在位置。由圖8可知,無人機最初按照預定的路線開展巡檢,但是在飛行到航點2 附近檢測到電場超出閾值,此時無人機距離輸電導線中心水平距離為9.6 m,且后續電場值持續超過閾值,故觸發返航功能,沿返航路徑返回出發點。
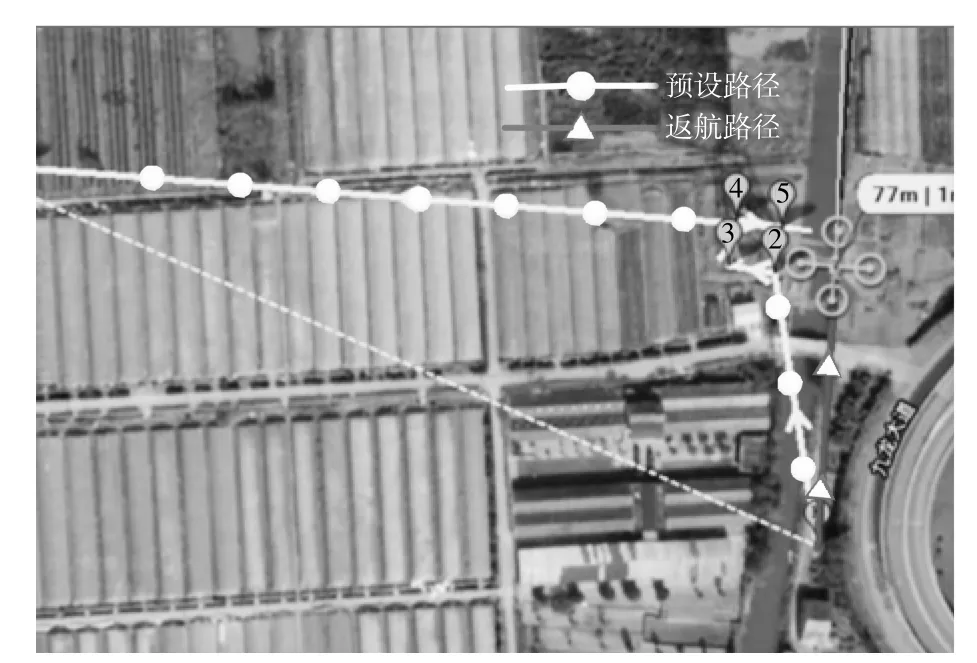
圖8 避障返航路徑測試
4 結論
(1)在對500 kV 線路電場仿真分析后,本文提出了兩種不同的安全距離判別方法:一是設定無人機2 000 V/m 的電場安全閾值,對無人機進行粗略控制;二是將高度與電場值相結合,利用插值算法反演出無人機的精確位置。
(2)介紹了無人機測試系統的硬件設備,并基于輸電線路的電場分布規律提出無人機的避障流程和路徑規劃。
(3)基于電場反演理論,開展了無人機安全距離現場測試。一是引入高度變量,開展無人機精確位置的反演;二是利用電場保護閾值,測試無人機避障返航功能。經現場測試,驗證了基于輸電線路電磁場分布的避障方法的有效性。該方法可為輸電線路無人機巡檢距離控制、航向規劃和安全避障提供技術支撐。