步進電機的模糊控制研究
2021-03-13 09:13:08
浙江電力 2021年2期
(廣東電網(wǎng)公司東莞供電局,廣東 東莞 523000)
0 引言
伺服電動機或者步進電動機的共同點是提供了相似的精確定位,但是它們在許多方面又有所不同。伺服電動機需要模擬反饋控制系統(tǒng),只能應(yīng)用于閉環(huán)回路。而步進電機可用于簡單的開環(huán)控制系統(tǒng)中。這些通常適用于在靜態(tài)負載下以低加速度運行的系統(tǒng),但是對于高加速度而言,尤其是在涉及可變負載的情況下,閉環(huán)控制是必不可少的[1]。
在本文中,提出了利用模糊控制邏輯的方法來控制步進電機速度。Zadeh[2]提出閉環(huán)控制方案采用的是將設(shè)計人員的經(jīng)驗與工程知識整合到自動控制系統(tǒng)中以描述復(fù)雜的系統(tǒng)。但是這些系統(tǒng)很難使用傳統(tǒng)的數(shù)學(xué)方法進行分析。實際上,Mamdani[3]是第一個設(shè)計出模糊邏輯在實驗室小型蒸汽機中的應(yīng)用。這項研究的成功使許多科學(xué)家嘗試使用模糊算法來控制過程,例如化學(xué)反應(yīng)堆,自動電機或核反應(yīng)堆的控制過程[4-5]。這些實驗的結(jié)果表明,模糊控制器比傳統(tǒng)控制器的性能更好。而且,該技術(shù)的優(yōu)點是僅需一個簡單的數(shù)學(xué)模型即可實現(xiàn)算法,該數(shù)學(xué)模型可通過數(shù)字計算機輕松實現(xiàn)。傳統(tǒng)的控制方法在工業(yè)環(huán)境中應(yīng)用廣泛,但對于大滯后、非線性復(fù)雜的系統(tǒng),傳統(tǒng)常規(guī)控制方法的不穩(wěn)定性導(dǎo)致控制效果并不理想。模糊控制不需要控制對象的精確數(shù)學(xué)模型,它是一種基于規(guī)則的控制,更多的是依據(jù)操作人員的控制經(jīng)驗,通過查表等方法,可以得到控制量,控制效果明顯。另外,模糊邏輯被研究者更頻繁地應(yīng)用于控制電機,例如直流電動機或感應(yīng)電動機[6]。然而,模糊邏輯的問題是它沒有專門用于模糊控制器設(shè)計的系統(tǒng)程序。正是由于這個原因,在本文中提出使用ANFIS(自適應(yīng)神經(jīng)模糊推理系統(tǒng))的方法[7-8]來調(diào)整模糊系統(tǒng)的參數(shù),從而達到對系統(tǒng)進行控制的目的[9]。當(dāng)然,還有其他混合方法可用于獲得模糊系統(tǒng)[10],但是,ANFIS是實現(xiàn)步進電機控制過程中所需要的精度和效率的理想選擇。
1 步進電機的分類
步進電動機分為永磁體和可變磁阻2 種類型,可變磁阻電動機通常有3 個(有時是4 個)繞組,并具有相同的回路,而永磁電動機通常具有2 個獨立的繞組,有的永磁電動機還具有中心抽頭。中心抽頭繞組用于單極永磁電動機[11]。步進電機具有多種角度分辨率。
1.1 可變磁阻電動機
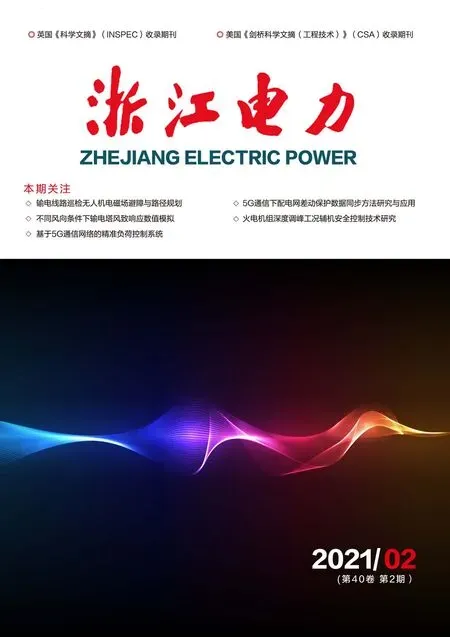
如果電動機具有3 個繞組,如圖1 所示。圖中所有繞組共有一個端子,則該電機為可變磁阻步進電動機。在使用的過程中,公共線通常與電源正極連接,并且繞組依次通電。圖1 所示的截面為可變磁阻電動機的橫截面。該電動機有4 個轉(zhuǎn)子,6 個定子,每個繞組都纏繞在2 個相對的磁極上。在給1 號繞組通電后,標(biāo)記為X 的轉(zhuǎn)子齒被吸引到該繞組的磁極上。如果關(guān)閉通過繞組1 的電流而打開繞組2 的電流,則轉(zhuǎn)子將順時針旋轉(zhuǎn)30°,以使標(biāo)記為Y 的磁極與標(biāo)記為2 的極對齊。
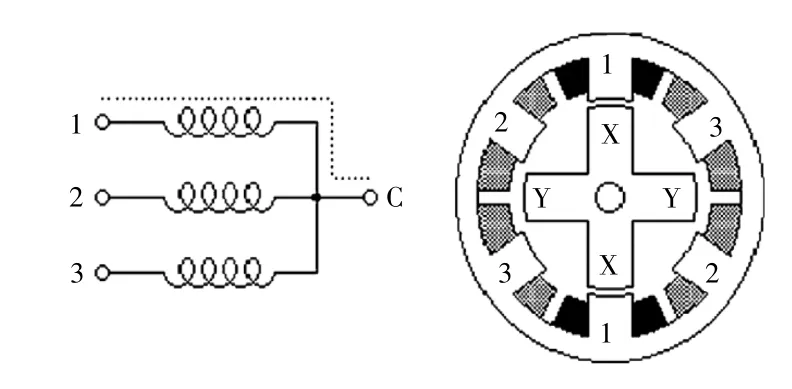
圖1 可變磁阻電動機
1.2 單極電機
如圖2 所示,單極步進電機(包括永磁體電機和5 或6 線混合步進電機)通常為2 個繞組都有一個中心抽頭。在使用過程中,繞組的中心抽頭通常與電源正極相連,每個繞組的兩端交替接地,其目的是為了將繞組提供的磁場方向進行翻轉(zhuǎn)。圖2 中所示的電動機橫截面為30°每步的永磁電動機。對于具有更高角度分辨率的電機,其轉(zhuǎn)子必須按比例具有更多的磁極與之相對應(yīng)。圖2 中的30°步進電動機是最常見的永磁電動機設(shè)計之一,盡管15°和7.5°每步的步進電動機也被廣泛地使用。
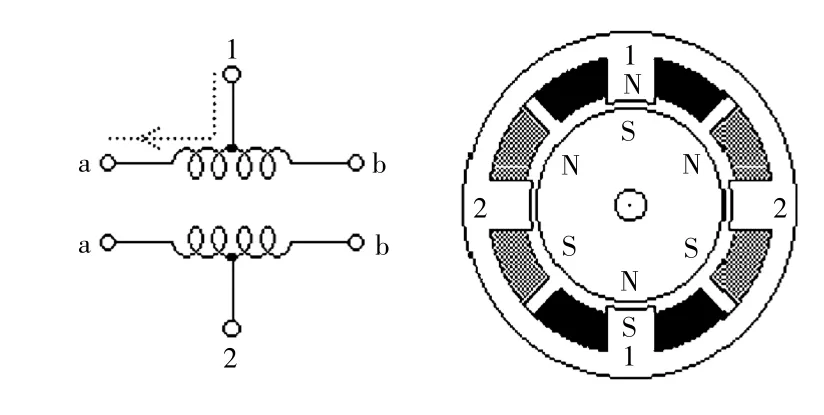
圖2 單相電機
1.3 雙極電機
雙極永磁體和混合動力電動機的結(jié)構(gòu)與單極電動機完全相同,但是2 個繞組的接線方式更加簡單并且沒有中心抽頭。圖3 顯示了這種電動機的接線方式,電動機橫截面與圖2 的橫截面完全相同。
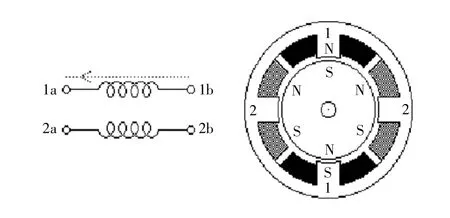
圖3 雙極電機
2 步進電機的動力學(xué)
每次步進電動機轉(zhuǎn)動時,都要以電子的方式平移S 弧度。如圖4 所示,這會將整個曲線移動了S 弧度的距離。
當(dāng)轉(zhuǎn)子從圖4 中的一個步驟到另一個步驟的一半時,最大可用轉(zhuǎn)矩達到最小值。該最小值是用來確定運行轉(zhuǎn)矩,即確定電動機緩慢前進時可以驅(qū)動的最大轉(zhuǎn)矩。如果通過一次給2 個繞組供電來驅(qū)動步進電動機,則理想的兩繞組永磁電動機的運行轉(zhuǎn)矩將與單繞組轉(zhuǎn)矩保持一致。
電機轉(zhuǎn)子的共振頻率取決于振蕩的幅度。但是,隨著振幅的降低,諧振頻率上升到小振幅頻率。形式上,小幅度共振可以計算得到。首先,根據(jù)牛頓定律的角加速度可以得到:
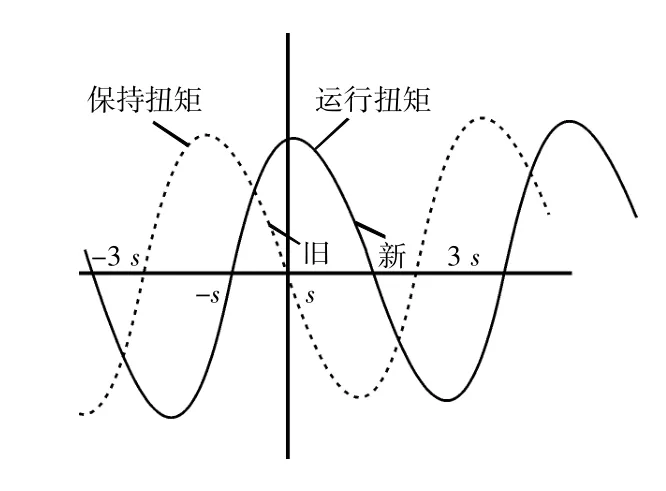
圖4 步進電機的動力學(xué)

式中:T 為施加在轉(zhuǎn)子的轉(zhuǎn)矩;u 為轉(zhuǎn)子和負載的慣性矩;A 表示為角速度,A 以弧度每秒為單位。假設(shè)對于小振幅,轉(zhuǎn)子上的轉(zhuǎn)矩可以近似地表示為從平衡位置開始位移的線性函數(shù),即:

式中:k 為系統(tǒng)的彈簧常數(shù),單位為每弧度的扭矩;θ 為轉(zhuǎn)子的角位置,以弧度為單位。
將獲得扭矩的2 個公式等價:uA=-kθ。加速度是位置相對于時間的二階導(dǎo)數(shù):。因此,可以用微分方程形式將其轉(zhuǎn)換下形式為:。由f(t)=asinbt 得:

假設(shè)轉(zhuǎn)子共振,因此是在諧振的過程中,具有如下運動方程:

式中:a 為表示共振角幅度;f 為共振頻率。
實際上,當(dāng)步進速率接近系統(tǒng)的諧振頻率時,這種振蕩會引起嚴重的問題。產(chǎn)生的后果為不可控制且隨機出現(xiàn)。
3 步進電機的模糊邏輯控制
模糊邏輯控制器提供了一種算法,可以將基于專業(yè)知識的語言控制轉(zhuǎn)換為自動控制策略從而達到控制電機運轉(zhuǎn)的目的[12]。
根據(jù)實際數(shù)據(jù),應(yīng)用ANFIS 方法來調(diào)整模糊控制器的參數(shù)[13-14]。PC 中會把生成步驟輸入到系統(tǒng)中并存儲。模糊控制器也包含在PC 中,并進行相應(yīng)的響應(yīng)。實驗系統(tǒng)如圖5 所示。
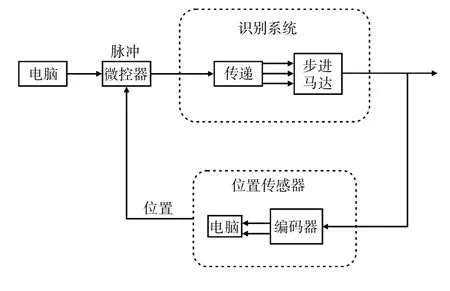
圖5 實驗系統(tǒng)
(1)電動機/驅(qū)動器
微步電動機型號為Vexta PV266-01E,具有5 個相數(shù)和500 步旋轉(zhuǎn)。電機如圖6 所示。具有多種分辨率的電源驅(qū)動器Vexta DFR1514A(最低:500 步;最高:125 000 步)。
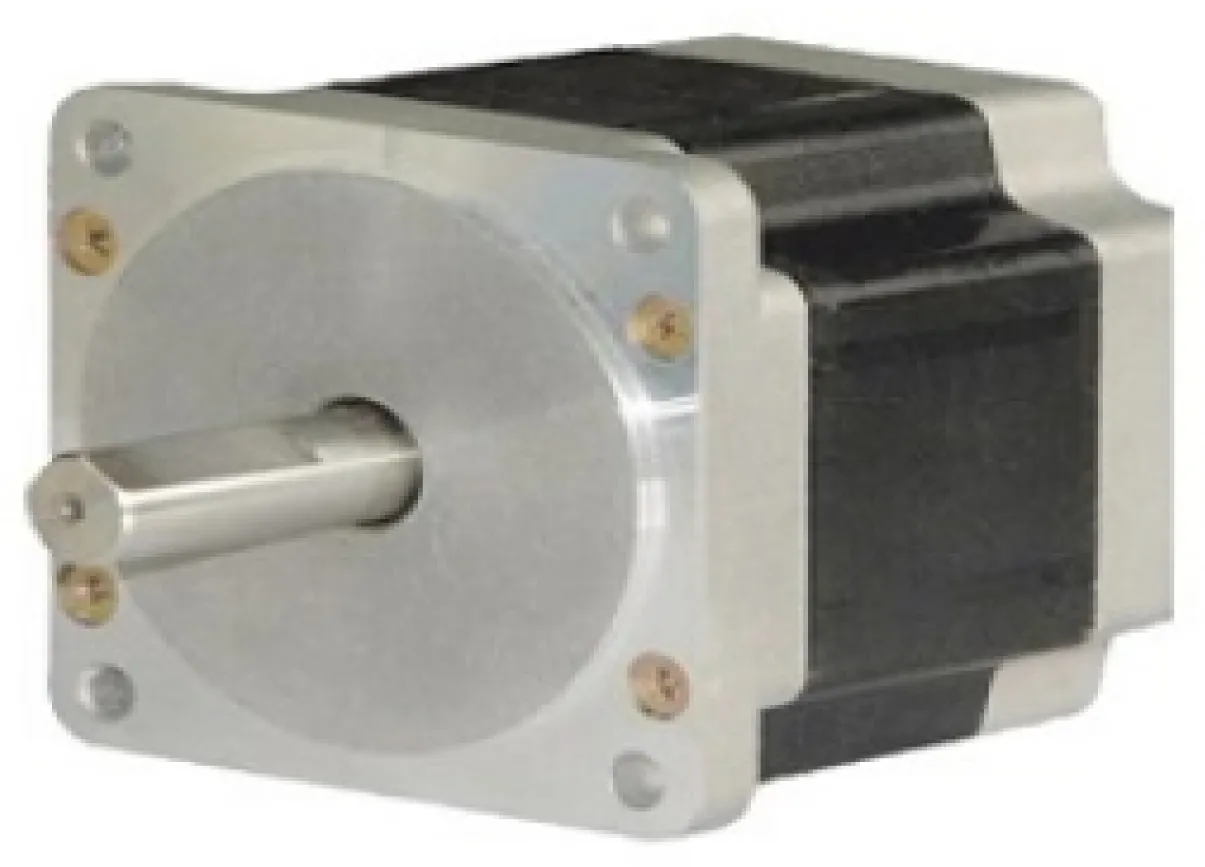
圖6 Vexta PV266-01E 步進電機
(2)數(shù)據(jù)采集卡
采用研華PCL-818,具有8 個模擬輸入和2個模擬輸出(12 位),16 個數(shù)字輸入,16 個數(shù)字輸出,采樣時間為0.25 ms。
(3)計算機/軟件
控制規(guī)則如下:

用于控制步進電機的Sugeno 模糊模型[15]。本文使用了ANFIS 方法來估計隸屬函數(shù)及其后繼函數(shù)的參數(shù)。對于每個語言變量,使用具有9 個規(guī)則和3 個隸屬函數(shù)的模糊模型。如圖7 所示,ANFIS 模糊系統(tǒng)的結(jié)構(gòu),同時利用ANFIS 方法構(gòu)造顯示自動設(shè)配網(wǎng)絡(luò)中的模糊控制,由ANFIS 方法生成的模糊規(guī)則如圖8 所示。這些規(guī)則是使用ANFIS 方法自動生成的。該模糊模型的非線性面如圖9 所示。
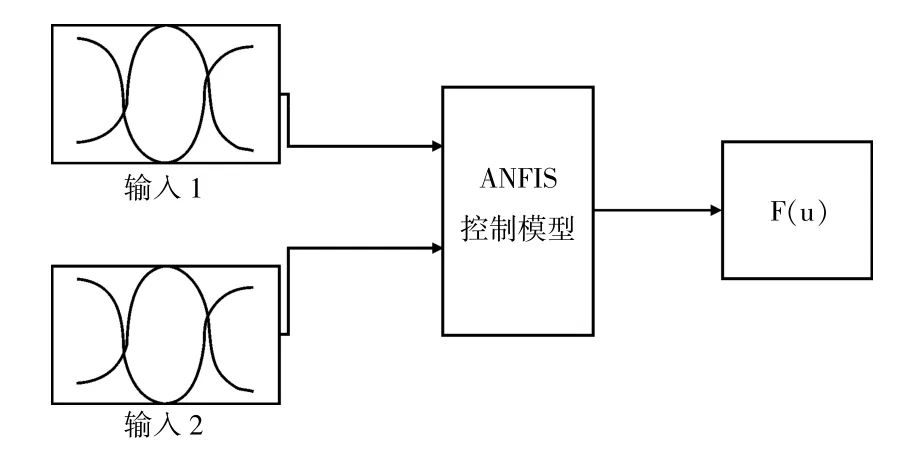
圖7 ANFIS 模糊系統(tǒng)的結(jié)構(gòu)
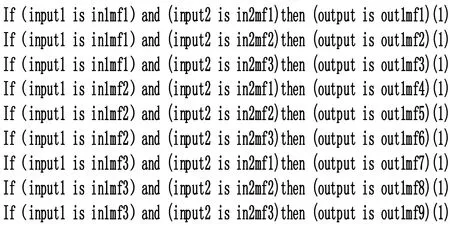
圖8 由ANFIS 方法生成的模糊規(guī)則
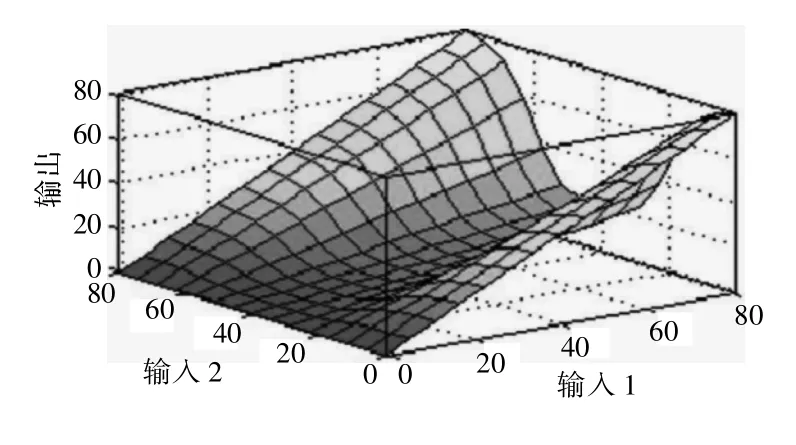
圖9 Sugeno 模糊模型的非線性表面
4 硬件的實現(xiàn)
模糊控制需要ANFIS 控制器才能真正實現(xiàn)智能步進電機的目標(biāo)。神經(jīng)模糊方法使電動機具備了適應(yīng)環(huán)境變化的能力。配備有智能控制器的步進電機將能夠使用新數(shù)據(jù)對其進行訓(xùn)練,并進行數(shù)據(jù)參數(shù)的更新,從而能夠相應(yīng)地更改其行為。
ANFIS 方法的基礎(chǔ)訓(xùn)練是在自適應(yīng)網(wǎng)絡(luò)上進行的,使用問題相關(guān)變量的時間序列作為數(shù)據(jù)。因此,選擇了Jstamp 微處理器作為控制器的核心。該微處理器使用JAVA 作為本機編程語言,具有512 KB 的RAM 內(nèi)存和512 KB 的FLASH內(nèi)存。如圖10 所示,為研究過程中的Jstamp 微處理器。由ANFIS 的數(shù)字混合性質(zhì)可知,在正向使用最小二乘法,而反向傳播算法是反向算法[16]。這些方法是用JAVA 語言實現(xiàn)的,然后將它們下載到Jstamp 微處理器中以獲得模糊控制器。
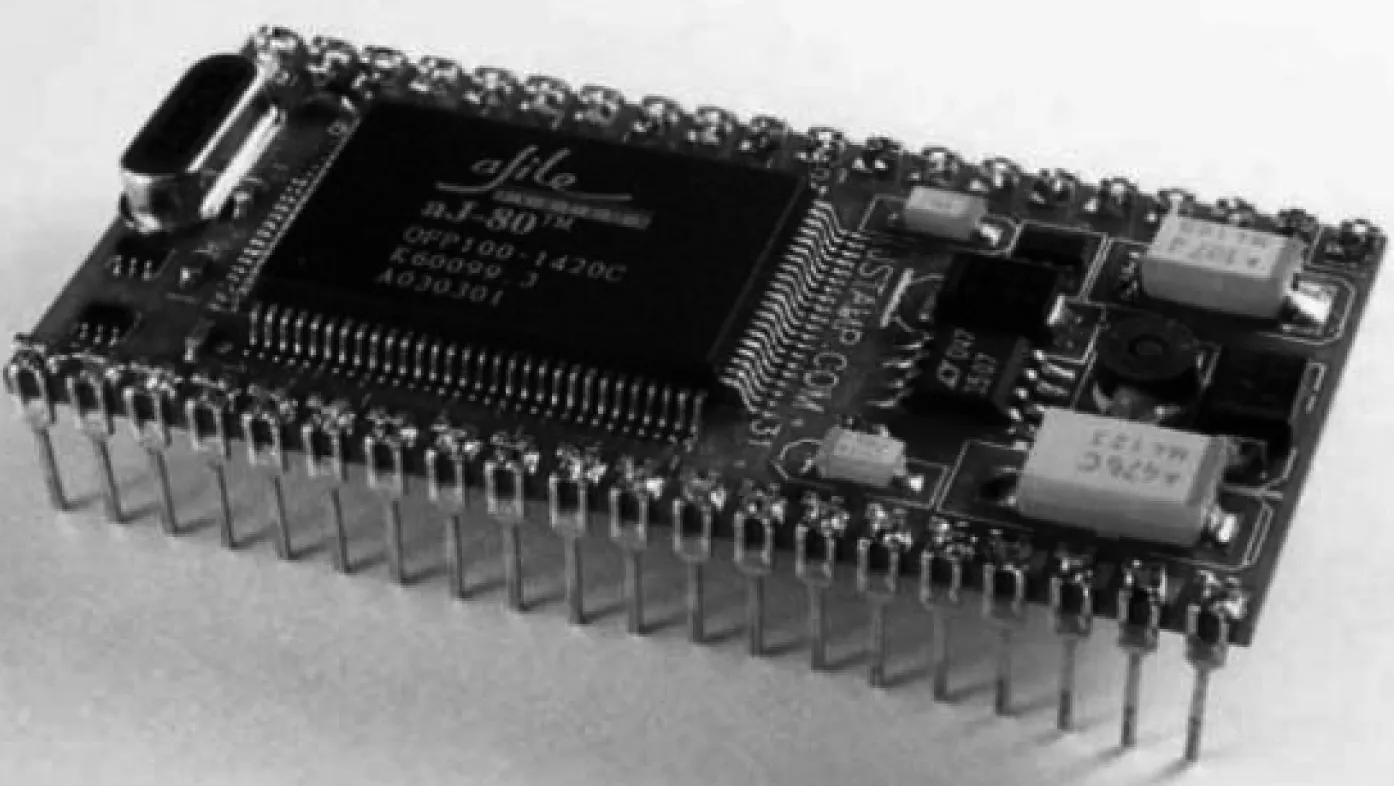
圖10 用于實現(xiàn)的Jstamp 微處理器
5 實驗結(jié)果
如圖11 所示,表示為步進電機對一系列步進輸入信號的響應(yīng)(本方案使用了400 個樣本)。由圖12 可得到ANFIS 方法應(yīng)用于訓(xùn)練數(shù)據(jù)和測試數(shù)據(jù)的結(jié)果。使用了20 個紀元進行訓(xùn)練,最終誤差為0.000 001,這對于此應(yīng)用程序非常有用。
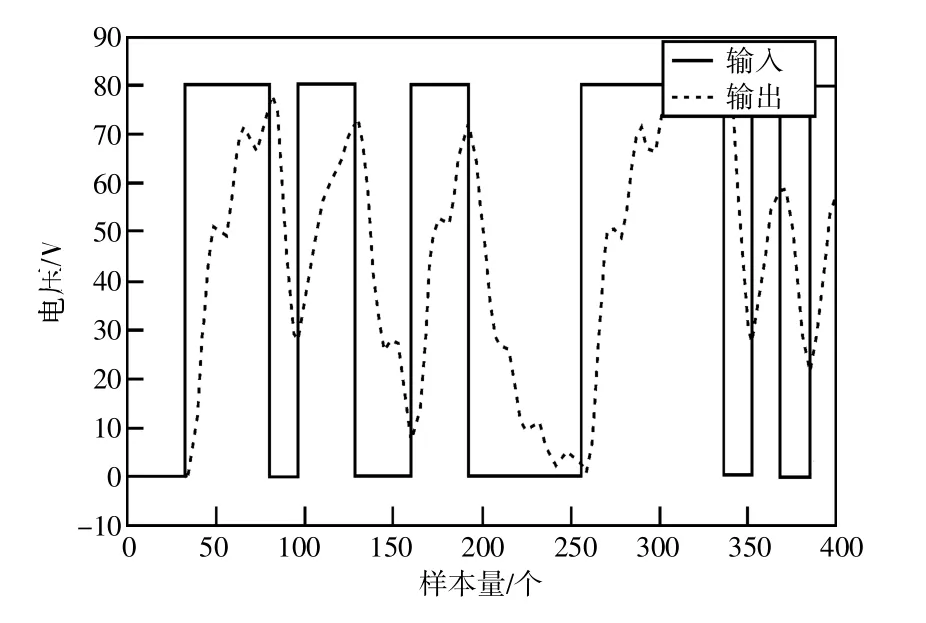
圖11 步進電機對一系列步進輸入信號的響應(yīng)
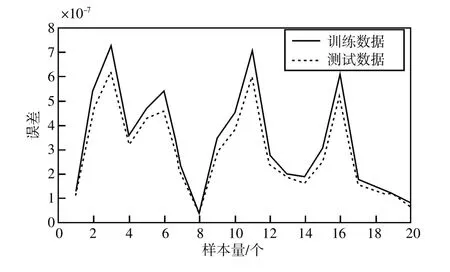
圖12 將ANFIS 方法應(yīng)用于訓(xùn)練和測試數(shù)據(jù)的結(jié)果
因此,所提出的設(shè)計證實了模糊控制與非線性過程的快速控制有關(guān),例如步進電機驅(qū)動器中的定量方法并不總是合適的。與傳統(tǒng)的定量控制器相比,該方法的另一個優(yōu)點是不需要固定的采樣時間。
6 結(jié)語
本文通過仿真和實驗證明了模糊控制在步進電機驅(qū)動中的可行性。通過使用ANFIS 確定了模糊控制器的最佳參數(shù)。模糊控制器具有非常強大的跟蹤功能,并且能夠響應(yīng)不同的動態(tài)條件,模糊模型產(chǎn)生的數(shù)據(jù)非常接近實際值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12